
潜艇舷外机电作动系统研究
2016-04-24 03:18李浩军孙桂才
舰船科学技术 2016年10期
李浩军,孙桂才,宿 勇,刘 洋
(1. 中国人民解放军91278部队,辽宁 大连 116041;2. 中国人民解放军92857部队,北京 100161;3. 海军装备部,北京 100841;4. 中国船舶重工集团公司 第七一四研究所,北京 100101)
潜艇舷外机电作动系统研究
李浩军1,孙桂才2,宿 勇3,刘 洋4
(1. 中国人民解放军91278部队,辽宁 大连 116041;2. 中国人民解放军92857部队,北京 100161;3. 海军装备部,北京 100841;4. 中国船舶重工集团公司 第七一四研究所,北京 100101)
潜艇机电作动系统用于电缆绞盘驱动、浮标布放与回收等,与传统液压系统相比,机电作动系统具有所占空间小、重量轻、节能等特点。本文结合阿特拉斯电子英国分公司开发潜艇舷外机电作动系统的情况,探讨使用核潜艇(三相交流电)和常规潜艇(电池直流电)上不同类型电源的机电作动系统的优缺点。在提高控制能力、功率与重量/空间比、建立冗余等多个方面,比较预制电机、无刷直流电机和同步交流电机的各自特点。在机电作动系统的设计过程中,还要考虑环境及集成因素的影响。
潜艇舷外;机电作动;系统设计
1 潜艇机电作动系统的电源考虑
潜艇机电作动系统在核动力潜艇和常规潜艇上使用,就要面对一个重要问题,就是电源的选择。核动力潜艇主要提供三相交流电电源,而常规潜艇则提供直流电电源。针对不同的电源,在机电作动系统设计集成过程中,需要仔细考虑。
1.1 采用三相交流电源
与直流电相比,采用三相交流电的机电作动系统相对容易地在潜艇上集成使用。在工厂或者商用建筑中,大多数工业或商用成品机电作动技术都采用三相交流电[1]。在潜艇应用中,与电池直流供电相比,核动力装置供电更加稳定且更加充足。对于系统设计而言,降低了为机电作动系统选择关键设备的难度。采用三相交流电,机电作动系统能在更大范围内选择机电作动系统设备。如果原有系统部件老化或出现故障时,也能在广泛的设备市场中较容易地找到相同技术规格的替代品[2]。
在潜艇上应用的三相交流电与工业/商用成品技术最大不同在于接地中点的不同。因为潜艇上的电气设备一般不使用接地中点,但是工业/商用成品的隔离变压器则要求提供接地中点;大多数工业用驱动电机为了能正常运行,需要指定接地中点。如果潜艇平台没有为变压器提供接地中点,那么将导致艇内的主要电气设备体积的大幅增加。这是因为不得不为每套系统都配备 1 台单独的变压器,拥有多套系统的潜艇平台无疑将浪费大量空间。在综合电力系统和全电舰概念设计中,这个因素应该重点考虑[3-4]。
在核动力潜艇平台上,为保证电压和功率的可用性,系统设计要求系统运行的额定电压要比常规潜艇平台上使用更接近有效电源电压,如图1 所示。
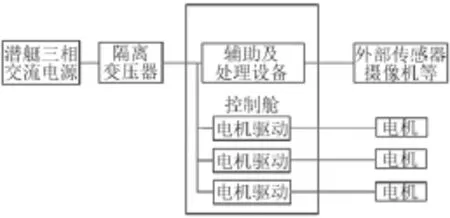
图1 三相交流电系统布置Fig. 1 Three-phase AC systemarrangement
1.2 采用直流电源
与核动力潜艇相比,开发在常规潜艇上使用直流电的机电作动系统将要解决更多的困难。下面介绍 2种应用商用成品电机驱动技术的可行方案。
第 1 种方案的特点是系统零部件数量相对少,直接由直流电源供电驱动;第 2 种方案则要求系统运行在指定电压下,使用逆变器产生三相交流电,并通过调压器使电压达到要求。潜艇 AIP 系统的主要用途是为潜艇电池充电,以增加潜艇潜航时间。常规潜艇机电作动系统使用直流电源的可能性很大。第 1 种方案虽然简单,但对设备的要求极为严格。在 300 ~ 600 V的电压范围内,电机转速要达到系统要求的额定转速。为了达到要求,驱动电机必须具备在最低电压下达到额定转速的能力。这使得电机的性能要远远超过实际使用要求。由此带来的负面影响是驱动电机的尺寸及重量都将大幅增加,致使潜艇中安装布置愈加困难。另一个原因是能达到在潜艇上使用要求的商用成品驱动电机数量极少。为了能在系统中使用,驱动电机与外部直流总线并联连接。根据经验,这种系统结构不需要像工业交流驱动电机一样制定统一的标准。系统结构受限于功能性无刷直流驱动电机的使用。只有在这些驱动电机加装内置整流器才可使用标准三相交流电。绕过整流级,输电至直流母线终端。如果空间有限制,商用成品驱动器可以拆除整流级,最有效地节省空间。
第 2 种方案则要求更多的功率管理设备,以提供稳定的电源,满足系统中其他设备的要求。此外,还要求不论是交流驱动电机还是直流驱动电机,都要使用标准的单相或三相交流电源。这种方案缺点是占用的空间很大,特别是大功率系统。只能通过减少不必要的电气设备及装置,以减少所占空间。如果不是严格限制系统结构尺寸时,这种方案具有优势。

图2 直流电直接驱动Fig. 2 DC direct drive
2 潜艇机电作动系统电机的优缺点
目前用于潜艇机电作动系统的电机主要有 3 种类型:第 1 种是预制电机,针对使用要求特制的电机;第 2 种是使用现有的无刷直流电机,控制精度高;第3 种是使用工业交流电机,使用费用低。
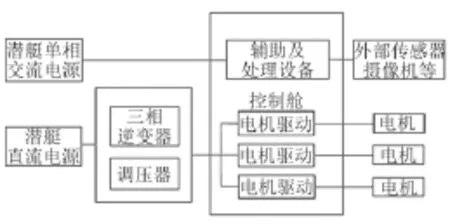
图3 直流电转为三相交流电Fig. 3 Convert DC to three-phase AC
2.1 预制电机
用于潜艇机电作动系统的潜水电机采用预制设计,根据使用需求而专门设计制造,其优点显而易见。商用成品潜水电机的通常型式是缸体长度大于直径,采用标准轴和键槽布置。为了提高功率体积比,要求电机高转速运行。在诸多潜艇操作及作动系统实际应用中,电机输出的转速和扭矩不能同时达到要求。因此,需要配备齿轮箱或功率更大的电机。这就造成了空间和能量的使用效率低下。使用齿轮箱,特别是传动比大的齿轮箱,会产生噪声大等其他问题。后驱动电机和输出扭矩的精确控制及扭矩测量相对更加困难。如果增加齿轮箱,那么使用电驱动的很多优势将丧失。与其他方式相比,采用高速电机和齿轮的直接驱动系统有可能产生更大的噪声。但这并不意味着传统电机及运行特性就不能使用,还要结合实际应用和控制精度的要求而决定。因为预制电机要比使用现有电机的价格高出很多,所以选择预制方案要经过慎重考虑。
采用预制电机设计,能满足驱动系统对于转速和扭矩输出的要求。预制设计也能改进作动系统的结构形式,即使系统体积没有绝对减少,也更能适合狭窄空间。其他因素也起着重要作用,如对电机、飞轮和后驱动等装置建立冗余,有效提高效率,降低噪声。建立冗余对于舰船安全至关重要。预制电机能制成拥有 2 个及以上定子、转子副,每对都拥有单独的控制器;如果其中一对定子、转子副出现故障,只是降低了电机性能,但不会导致电机完全无法使用。
阿特拉斯电子英国分公司研制出多种用于直接驱动的预制电机,如垂直轴向绞盘电机样机,RTOF(可回收带光纤卫星通信浮标系统)和 S-80TAHS(西班牙S-80 潜艇的拖曳搬运系统)的绞盘电机,以及 2 台经过重新封装能在水下环境中使用的工业交流电机[5-6]。这些电机采用了 3 种不同的预制电机设计方法。
电机样机和 RTOF 电机完全采用预制电机设计。阿特拉斯电子英国分公司直接与一家专业设计可升级电机线圈的公司合作联合设计电机。将电机线圈和磁极直接加到电机转子和定子上。采用这种方法制造的电机优点是结构紧凑。但缺点也很突出,由于转子和定子不易拆卸,导致维护起来十分复杂。绞盘电机可随着潜艇航行,在低张紧度下高速布放,之后在高张紧度下回收。拥有独立张紧传感器的电机控制系统虽然具有一定的顺度,但电机仍需要从一个方向全速运转,迅速减速再加速到相反方向全速运转。

图4 组装过程中的垂直轴绞盘电机样机Fig. 4 Assemble processing of vertical shaft capstanmotor prototype
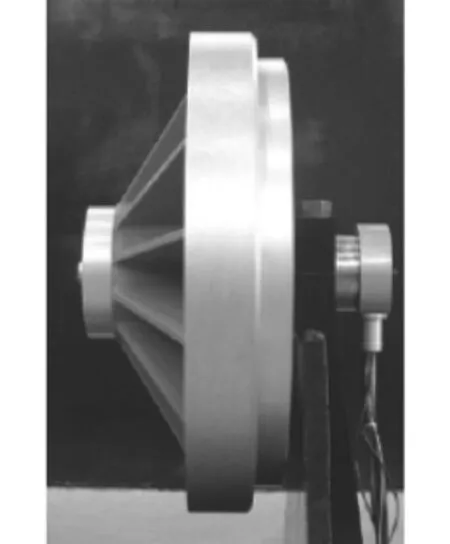
图5 RTOF 绞盘电机Fig. 5 RTOF capstanmotor

图6 S-80 TAHS 绞盘电机Fig. 6 S-80 TAHS capstanmotor
S-80 TAHS 电机为无外壳(frameless)电机,也是预制电机。电机线圈和磁极先通过螺栓固定安装在相应的位置上。随后,转子和定子安装在压力补偿外壳中。该机架用于承受绞盘鼓筒运转和冲击载荷。这种电机的维护和接口控制相对容易,但所占空间较大。这种电机无需机械制动,就能保持对于拖曳阵的最大牵引力,但本着节能的目的,还会使用机械制动器。
2.2 无刷直流电机
无刷直流电机通常都使用分解器反馈。这些电机具有较高的功率密度,可控性好。因此,可用于电缆式操作系统[7]。阿特拉斯电子英国分公司使用的电机,特别是大型直接驱动电机,电机位置控制精度达到了 1°。
2.3 交流电机
与无刷直流电机相比,潜水交流电机的使用成本较低,但功率密度和控制精度都较差[8]。没有速度反馈,所以速度控制虽然不能像无刷直流电机那样精确,但也达到了一般的控制要求。缺少反馈也有好处,那就是电机只需要 1 个电缆接头,因此简化了外壳设计,降低了电缆要求。当不要求控制精度太高时,如低速控制等,可选用此种电机。交流电机通过编码器反馈,也能提高控制精度,但还达不到永磁电机的控制水平。
重新封装的交流电机比无刷直流电机的费用低。拆下工业电机的转子和定子,装入适合水下环境使用的防水外壳中。这种方案制造费用低,并可同时生产多台电机。

图7 经过重新封装的潜水交流电机Fig. 7 Repackaged submersible ACmotor
3 机电作动系统的特点
与液压作动系统相比,机电作动系统具有控制精度高、有效性和可靠性高、结构更紧凑及控制更灵活等优点。
提高作动系统控制精度,要求采用更精密、更灵敏的传感器。要在作动器工作过程中,减少系统起动和停止载荷冲击,降低磨损和噪声。
机电作动系统要尽量减少运动部件的磨损,并且要具备进水情况下工作数周的能力。液压系统浸入海水,将使比例阀出现严重问题,无法实现液压系统的精确控制。
整套系统结构比较中,机电作动系统更为紧凑。虽然在单位体积输出力方面,机电作动系统还不能取代液压系统。S-80 TAHS 绞盘电机的体积相当于具有相同输出功率液压电机的 3 倍,重量相差也很大。但是,从整套系统上看,机电作动系统的优势就显现出来了。由于省去了液压管路、储油器、蓄压器、阀体等装置,能为潜艇节省大量空间,并降低系统重量。
同时,机电系统还提高了系统灵活性。提高灵活性不仅在提高电机的控制精度方面有所体现,也在系统所驱动及控制的设备上有所体现。拖曳阵收放系统的控制台,也能用于控制范围通信浮标系统,仅需要在软件方面进行变化。系统舷外设备被另一系统舷外设备代替,并不需要对改变控制硬件。在特殊情况下,通过管理控制,允许 2 个或更多系统使用同一控制台,交替使用同一电机驱动。前提是这 2 套系统不能同时工作。这样有利于节省空间。
4 机电作动系统在潜艇上应用可能存在问题
机电作动系统在潜艇上应用,在复杂性方面没有更多特别之处。机电作动系统的功率级别和脉宽调制(PWM)频率与mF 声呐系统相同。
1)在操作系统电驱动和电磁辐射管理方面容易出现问题。在可评估系统中,应用数十个功率放大器,进行方波转化。电机的PWM控制将保证电缆屏蔽的需要。对于具有压力补偿能力充液潜水电机,充液的选择对于系统在低温下可靠运行至关重要。如果低温下,液体粘度变得太高,将提高对操作系统的电流要求。经常通过电流反馈,检测电机产生扭矩的大小,如果检测到扭矩过大将触发故障警报,警示系统出现故障,没有正常运行。
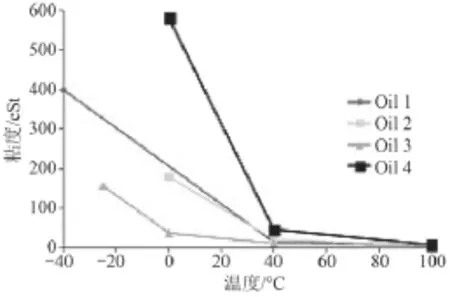
图8 用于压力补偿几种油液比较Fig. 8 Comparison of several oil for pressure compensation
2)充液的热膨胀要达到温度要求。液体热膨胀量越大,压力补偿就越大。如果不能使液体充分膨胀或收缩,将导致液体从电机中流出,或电机进水。如果液体流出,就意味着密封失效,并不需要在定期维护更换密封。如果电机进水且未及时发现,将侵蚀电机。基于上述原因,温度测试中不能仅做简单的检查,需要对设备进行彻底的检查。
3)与传统液压系统相比,机电作动系统穿过耐压壳体的供电和反馈电缆数量较少。机电作动系统的电缆,通过六角形耐压壳体穿孔。每个耐压壳体穿孔可以通过多根线缆。虽然单根线缆不比其他系统复杂,但是电缆和连接器的数量和种类多,要占用大量的空间。这需要在设计的时候考虑。
quid fuels[J]. Propulsion and Power Research, 2013, 2(2): 139-147.
[16]REDDY Vm, SAWANT D, TRIVEDI D, et al. Studies onaliquid fuel based two stage flameless combustor[J]. Proceedings of the Combustion Institute, 2013, 34(2): 3319-3326.
[17]REDDY Vm, KATOCH A, ROBERTS W L, et al. Experimental and numerical analysis for high intensity swirl based ultra-low emission flameless combustor operating with liquid fuels[J]. Proceedings of the Combustion Institute, 2014, 35(3): 3581-3589.
[18]LI P F, DALLYbB,mI J C, et al.mILD oxy-combustion of gaseous fuels inalaboratory-scale furnace[J]. Combustion and Flame, 2013, 160(5): 933-946.
[19]Tu Y J, Liu H, Chen S, et al. Numerical study of combustion characteristics for pulverized coal under oxy-MILD operation[J]. Fuel Processing Technology, 2015, 135: 80-90.
Research on the electromechanical actuation systemfor submarine outboard
LI Hao-jun1, SUN Gui-cai2, SU Yong3, LIU Yang4
(1. No.91278 Unit of PLA, Dalian 116041, China; 2. No. 92857 Unit of PLA, Beijing 100161, China; 3. Navy Equipment Department, Beijing 100841, China; 4. The 714 Research Institute of CSIC, Beijing 100101, China)
Submarine electromechanical actuation systemis used for cable capstan drive, buoy laying and recovery, etc. There aremany features compared with traditional hydraulic transmission, such as small size, light weight and energy-saving. This paper introduces the developing of submarine outboard electromechanical actuator systemdesigned by the Atlas Electronics UK Branch Company, and explores the strengths and weaknesses of electromechanical actuation systemon nuclear submarine and conventional submarine. The pre-fabricatedmotor, brushless DCmotor and synchronous ACmotor are compared inmany aspects as improving the control ability, the power and weight/space ratio, and the redundancy of the resume. In the design process of themechanical and electrical system, the influence of environment and integration factor is also considered.
outboard of submarine;electromechanical actuation;systemdesign
U674, T61
:A
1672 - 7619(2016)10 - 0103 - 04
10.3404/j.issn.1672-7619.2016.010.020
2016 - 06 - 27
李浩军(1963 - ),男,高级工程师,主要从事舰艇装备管理与保障相关研究工作。
猜你喜欢
汽车实用技术(2021年17期)2021-09-23
小哥白尼(趣味科学)(2021年4期)2021-07-28
中国有色金属(2020年14期)2020-12-09
汽车与新动力(2019年5期)2019-11-07
商品与质量(2018年37期)2018-12-06
宇航计测技术(2018年3期)2018-09-08
物联网技术(2017年7期)2017-07-20
新高考·高一物理(2015年6期)2015-09-28
科技视界(2015年13期)2015-01-01
纺织导报(2014年9期)2014-10-31
