
国外 UUV 拖曳声呐试验情况分析
2016-04-24 03:13李佳橦王连文
舰船科学技术 2016年10期
李佳橦,陈 强,王连文
(中国人民解放军 92537 部队,北京 100161)
国外 UUV 拖曳声呐试验情况分析
李佳橦,陈 强,王连文
(中国人民解放军 92537 部队,北京 100161)
本文描述了 SLITA 和微型 SLITA 接收声信号试验和噪声分析过程及结果,并绘制接收声信号模块图。同时,描述了 TOSSA 收发声信号试验及分析过程和结果,并绘制发射声信号模块图和建立声信号单程传输基本模型。
UUV;声呐;拖曳阵;接收和发射声信号;试验
0 引 言
经过长时间的探索和分析,人们发现声波在海水中的传播能力为最佳,其他辐射形式例如电磁波和光波在海水中的衰减都比声波大得多[1]。长期以来,为了保障潜艇使命任务的完成,配备了多种声呐,在这种配置下,潜艇的作战行动得到了保证[2]。
现如今由潜艇搭载拖曳声呐进行探测任务已成国内外反潜战发展趋势。拖曳线列阵声呐简称“拖曳阵声呐”,它是将水听器安置在电缆上形成线列阵,由拖曳电缆拖在潜艇后部水中探测目标的声呐[3]。其主要应用于测量潜艇辐射噪声,进行远程监视、测向和识别,有的也可用于测距。拖曳阵声呐优点是:基阵尺寸大、工作频率低、利于线谱检测,能远距离隐蔽地发现目标;基阵入水较深,通过控制拖缆长度可调节基阵入水深度,以工作于有利水层;基阵远离平台,受平台噪声干扰小,作用距离远;基阵可随时收回,维修方便。缺点是:基阵、拖缆和收放装置占用运载空间大。
UUV 的高频前视声呐、侧扫声呐和下视声呐主要探测水下静止目标,探测距离比较近; 舷侧阵声呐、拖曳阵声呐和垂直阵声呐主要探测水下机动目标,探测距离较远,可测出目标的方位[4]。由于拖曳声呐离UUV 艇体较远,受其噪声影响小,因此应用拖曳声呐进行 UUV 探潜任务得到了广泛关注,主要采取被动接收声信号和收发合置处理声信号 2 种方式。
北约水下研究中心(NURC)从 2007 年开始进行新型被动拖曳阵 SLITA[5](SlimLine Towed Array)和微型 SLITA 试验,并进行降噪处理。在 2008 年底,完成并分析了主动发射声源 TOSSA[6](Towed Sound Source for AUV)接收和发射声信号系统。由于 AUV是 UUV 的一个分支,本文针对这些试验进行 UUV 接收和发射声系统的情况分析。
1 UUV 接收声信号系统试验及原理分析
该试验通过采用 SLITA 和微型 SLITA 两种新型拖曳阵进行接收外声源信号的工作,将接收的声信号通过 k-f 图和 V 型能量图的形式显示出来。由于接收信号的过程中因为信噪比很低[2],且有旁瓣效应,所以受环境噪声的影响较大,需要降噪处理。
1.1 波频图理论
用波频图区别声噪声和非声噪声(如机械噪声),波频图是源于时间和空间的双重傅里叶变换,其中 Y轴为时间频率,X 轴为空间频率 k,其中的正负值是区分由拖曳阵的 2 个声波束面产生的信号。

假定 d 为阵间距,则 k 的最大值为:

假定声速为 C,则波频 f 和到达角θ的变换如下:

f 的变换会产生经典的 V 型能量波。k-f 图中的 V区域确定了声能。V 区域外主要是非声能(如机械振动、流噪声等)或其他阵。V 型能量波边界表示声波束能,该声能来自于 UUV 推进器。

图1 线阵和平面声波Fig. 1 Linear array and planar acoustic waves

图2 k-f 图和 V 型能量波Fig. 2 k-f diagramand V-shape
1.2 SLITA 试验
1.2.1 SLITA
SLITA 是一个直径为 31mm的试验型拖曳阵,共有 48 个水听器,SLITA 具有持续采集信息和自处理信息的良好性能。图3 为其机械设计图。
1.2.2 SLITA 试验设备和方法
该试验采用的外置声源有:声调制解调器、声定位系统、UUV 声学多普勒流速剖面仪及李奥呐多回声测深器。
该试验于 2007 年 11 月初开始在帕尔马利亚岛前的 30m水深的区域进行。拖曳阵在高度为 10m的海床上进行试验。UUV 分别以静止和航行的状态接收声源信号,且在这 2 种状态下以 2 种不同频率孔径的拖曳阵进行接收声信号试验以达到定位的目的。
1.2.3 SLITA 试验结果及分析
真实试验数据的波频图没有显示出任何由于机械振动和拖曳阵变形产生的明显特征。图4 为 UUV 静止时的 k-f 图。该能量在 V-型曲线中没有汇聚到一点。图5 为 UUV 航行时的 k-f 图,它很好地形成了 V 型曲线,按预期噪声达到 30 dB。由于旁瓣效应的影响,余能量在 V 区域外(中频孔径大致 3 500 Hz,低频孔径大致 1 750 Hz)。

图3 SLITA 机械设计图Fig. 3 SLITA arraymechanical drawings

图4 UUV 静止时 k-f 图Fig. 4 k-f diagrams when AUV was not navigating
1.3 噪声原因
该试验采用的是 BenthosAQ-4 水听器(Sh=–201 dBV,1 μPa ± 1 dB)用来消除拖曳阵移动产生的噪声,即加速噪声。它的降噪实质上是通过在航行器内将有源元件均匀化的过程。在工程试验中,采用被动方式所产生的噪声很大。全面分析发现噪声源来自李奥纳多噪声本身。低至 15~20 kHz 的异常空泡噪声是推进器自旋产生的宽带白噪声。目前技术水平只能测出 UUV 在水面上航行时的推进器噪声,并不能测出其在水下航行的推进器噪声。
在这种条件下,由于 UUV 的自噪声是主要原因,详细评估拖曳阵的噪声便有一定难度。然而,由于李奥纳多噪声的宽频谱,在功率谱中可明显看出水听器的共振在 17 kHz 处(见图6)。

图6 李奥纳多湍流和噪声谱(距 UUV 约 30m)Fig. 6 Leonardo turbulence and noise spectra(ship distance around 30m)
图6 中的噪声不仅来自推进器自身,还包括由空泡产生的噪声和李奥纳多噪声,甚至在低速条件下产生的水流噪声,图中表明该噪声有较宽频谱。
1.4 微型 SLITA 试验
1.4.1 试验设备和方法
微型 SLITA 是 1 个直径为 12mm的试验型拖曳阵,阵总长 14m。包括 20 个水听器,1 个测深计和 1个倾斜传感器,其中有 1 个接口连接 SLITA 数据采集系统。
该试验于 2008 年开始。UUV 以 3~7 kn 航速范围变化,大致平行于意大利海岸线直线航行。
1.4.2 微型 SLITA 试验结果及分析
数据分析如下:
1)在声数据中没有可识别的被动湍流信号。
2)倾斜和压力传感器工作运行正常,数据显示这源于好的拖曳环境。数据中观察到的大部分声能都由李奥纳多噪声产生。
3)没有湍流能量明显在 6~13.5 kHz 频率范围内。R/V 李奥纳多机械噪声控制声能在这个频率以下。R/V李奥纳多电磁噪声控制水听器声能在这个频率以上。
1.5 UUV 接收声信号系统试验小结
在接收声信号进行定位试验的过程中,当声源置于端射附近,延迟的二次项可忽略,因此确定水听器的定位误差很容易。然而,当声源离舷侧很近时,分离附近区域近似值的二次项和拖曳阵本身曲率产生的二次项很困难,所以无法准确计算出水听器的定位误差。在处理噪声试验数据分析后发现,无论是哪种拖曳阵其主要噪声源都是 UUV 本身的李奥纳多噪声,试验数据表明 SLITA 和微型 SLITA 拖曳阵具有良好的声隐蔽性。
由该试验过程来看,接收声信号系统最根本的任务是对声呐接收水听器所收到的信号进行接收和处理,并对该信号作出信号“有”或“无”的判断[7]。经过接收基阵收到的波束在声信道中产生波频图,“动态范围压缩和归一化”和“信号处理”模块任务是把接收的信息以视觉方式显示出来,“动态范围压缩和归一化”模块还需消除声传输通道加给被传播信号的空间和时间特性[2]。

图7 接收声信号系统模块图Fig. 7 Model of receiving acoustic signal system
2 UUV 收发声信号系统试验及原理分析
2.1 UUV 收发声信号系统试验
NURC 在 2008 年底在 UUV 上安装 1 个发射声源TOSSA,以完成底层描述和反潜任务。反潜战基本内容是对潜艇进行探测、识别、跟踪、定位和攻击[8]。该试验的特点是发射声源和接收声信号装置不在一起,这和传统的潜艇接收和发射信号合置的装置构成不同。
2.1.1 试验对象
底层描述对象为海床附近杂波的地声特性(声速、密度、衰减等),这需要声呐单程传输模型的支撑。该方法采用的是带有拖曳源和水平阵的 UUV。
由图8 可看出,TOSSA 分为尾绳、BENS 拖曳阵、拖曳源和 OEX-C 航行器 4 个部分。其中,BENS拖曳阵是被动声呐阵,专用于接收声信号,包括低频、中频和高频;拖曳源是一个发射声源,其带宽范围是从 800~3 400 Hz;OEX-C 航行器采用定制传感器。拖曳系统包括尾绳、BENS 拖曳阵以及拖曳源 3个部分。

图8 TOSSA 机械设计图Fig. 8 Towed sound source AUV
2.1.2 试验过程
该试验于 2009 年 4 月初开始,OEX-C 航行器搭载BENS 拖曳阵和拖曳源,航行速度为 2 kn,且运行正常。试验采用回声中继器模拟了一个潜艇声信号,以达到有效测试 UUV 探潜的目的。航行器搭载 TOSSA航行的过程中,TOSSA 根据周围海洋环境及潜艇模拟信号进行自主判决发射高、中或低频声信号,echo 接收机置于声源外进行接收声信号任务,收发信号产生的波束在处理显示屏上汇总,从而得到收发声信号试验结果。
2.1.3 试验结果及分析
图9 显示了 UUV 收发合置声呐的工作,在处理显示屏上可以观察到清晰的探测过程。
从图中可看出,随着引脚数的增加,声波到达时间基本维持一致,这说明此 UUV 接收和发射声信号系统十分稳定,该系统可以作为一个中坚力量应用于未来的探潜任务当中。
2.2 UUV 收发声信号系统试验小结
TOSSA 发射出的声源被 echo 接收机连续接收,收发信号处理显示没有断点,探测试验结果令人满意。该试验不考虑噪声问题。
2.2.1 UUV 发射声信号系统
由该试验过程来看,在 UUV 执行任务过程中,UUV 发射声信号系统是采用主动声呐判断周边环境并分析特定情况形成波束,在全向或一个扇面空间内发射声信号的系统。
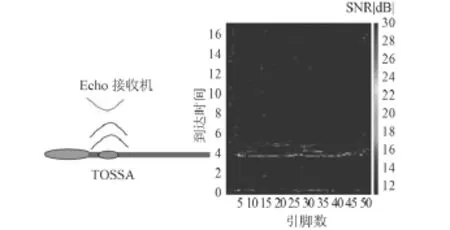
图9 OEX-C 航行器 + 声源 + echo 接收机:拖曳阵波束显示Fig. 9 OEX-C AUV + Sound source+echo repeater: beamdisplay fromtowed array

图10 发射声信号系统模块图Fig. 10 Model of transmitting acoustic signal system

图11 声信号单程传输基本模型Fig. 11 The basicmodel for acoustic signal one-way receiving and transmitting
2.2.2 发射声信号系统模块图
程序控制特定系统,信号发生器的输出到“波束成形系统”,为了给信号一个合适的加权和延时,使发射基阵在声信道产生一个波束图。该图决定了发射的声能如何集中和分布在空间[3]。
根据试验对象的需要以及过程,构建声信号单程传输基本模型如图11 所示[9]:
声源发射声信号传送给接收机的基阵模型,环境噪声对基阵模型有一定的影响,基阵模型将声信号转换成电信号进行处理,再将分析后的数据转换成声信号接收。
3 结 语
本文分析工作对于我国 UUV 拖曳阵声呐试验过程和结果分析具有重要借鉴意义。今后将深入研究 UUV搭载拖曳阵声呐在不同海洋环境条件下以不同航速、航迹进行不同探潜任务试验,以对 UUV 在实际作战中发挥作用予以支撑。
[1]陈实. 虚拟试验系统中AUV目标探测信息处理方法的研究[D]. 长沙: 国防科学技术大学, 2012.
[2]阎福旺, 刘载芳, 荣新光, 等. 现代声纳技术[M]. 北京: 海军出版社, 1998.
[3]邵云生, 彭会斌, 宋君才. 国外拖曳线列阵声纳技术现状与发展趋势[J]. 舰船电子工程, 2011, 31(1): 10–12. SHAO Yun-sheng, PENG HuI-bin, SONG Jun-cai. Current status and development trend of towed linear array sonar of foreign navy[J]. Ship Electronic Engineering, 2011. 31(1): 10-12.
[4]陈强. 水下无人航行器[M]. 北京: 国防工业出版社, 2014.
[5]MAGUER A, DYMOND R,mAZZIm, et al. SLITA:anew slimtowed array for AUV application[J]. Journal of the acoustical society of America, 2008, 123(5): 3005.
[6]MAGUER A, DYMOND R, GUERRINI P, et al. Receiving and transmitting acoustic systems for AUV/gliders[R]. La Spezia: NATO Undersea Research Centre, 2009.
[7]李鹏. 侦察声纳接收机的接收信号仿真研究[D]. 哈尔滨: 哈尔滨工程大学, 2012.
[8]徐江, 高山. 国外舰载反潜直升机探潜系统发展概述[J]. 论证与研究, 2011(5): 44–47. XU Jiang, GAO Shan. Development of submarine-detecting systems of foreign shipborne anti-submarine helicopters:asummary[J].Demonstration and Research, 2011. 5: 44-47.
[9]刘欣. 高频声纳接收信号仿真预报[D]. 哈尔滨: 哈尔滨工程大学, 2010.
Analysis of UUV towed array experiments
LI Jia-tong, CHEN Qiang, WANG Lian-wen
(No.92537 Unit of PLA, Beijing 100161, China)
The paper describes receiving acoustic systems experiments for SLITA andmicro-SLITA, whose results are used to analysis noise, and sets receivingmodel.meanwhile, the paper also describes and analysis receiving and transmitting acoustic systems for TOSSA, and sets transmittingmodel and receiving and transmittingmodel for one way.
UUV;sonar;towed array;receiving and transmitting acoustic signal;experiments
TB567
A
1672–7619(2016)10–0150–04
10.3404/j.issn.1672-7619.2016.10.031
2016–05–25;
2016–06–31
李佳橦(1991–),女,硕士研究生,研究方向为水下无人航行器效能评估。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
舰船科学技术(2022年11期)2022-07-15
电声技术(2022年3期)2022-04-28
无损检测(2022年1期)2022-03-16
建材发展导向(2021年18期)2021-11-05
科学家(2021年24期)2021-04-25
舰船电子工程(2020年9期)2020-10-30
建材发展导向(2019年11期)2019-08-24
电子制作(2019年9期)2019-05-30
