
用于水下目标监测的低频同振式矢量水听器研制
2022-03-16 02:05卞加聪苏宇博归宏猛
无损检测 2022年1期
葛 松,付 昌,卞加聪,苏宇博,归宏猛
(上海船舶电子设备所,上海 201108)
水声换能器(水听器)是有效的水下信息探测设备,受到各国的极大重视[1-2]。与传统的标量水听器基阵相比,矢量水听器无需成阵即可获得水中声场的矢量信息,具有体积小、质量轻等优势。目前,矢量水听器技术发展的主要方向包括低频检测、高信噪比、小型化[3-4]、阵列化[5]、新材料[6]、多用途、工程化应用等。
船舶噪声会损害船员及海洋生物的健康,同时其可以在一定程度上反映船体状态[7]。布置水下声学平台并对船舶噪声进行监测,可以及时发现异常船舶噪声,保障人员健康安全。低频船舶噪声对人员及海洋生物的危害更大[8],这就要求水下声学传感器具有较高的低频灵敏度。
笔者基于水中声矢量信号的低频检测问题,设计了一款三维同振式球型矢量水听器,并对该矢量水听器的性能进行理论计算,经驻波管灵敏度检测,发现计算结果与实际检测结果吻合良好。
该矢量水听器在20800 Hz频段内拥有较好的等效声压灵敏度以及“8”字型指向性,且体积相对较小,十分适用于浮标等海上声学监测平台,可布放在港口等处,用于对过往的船舶噪声等水下低频声信号进行监测。
1 同振式矢量水听器工作原理
1.1 加速度传感器原理
文中的矢量水听器核心元件为压电式加速度传感器,其结构及简化模型如图1所示[9]。
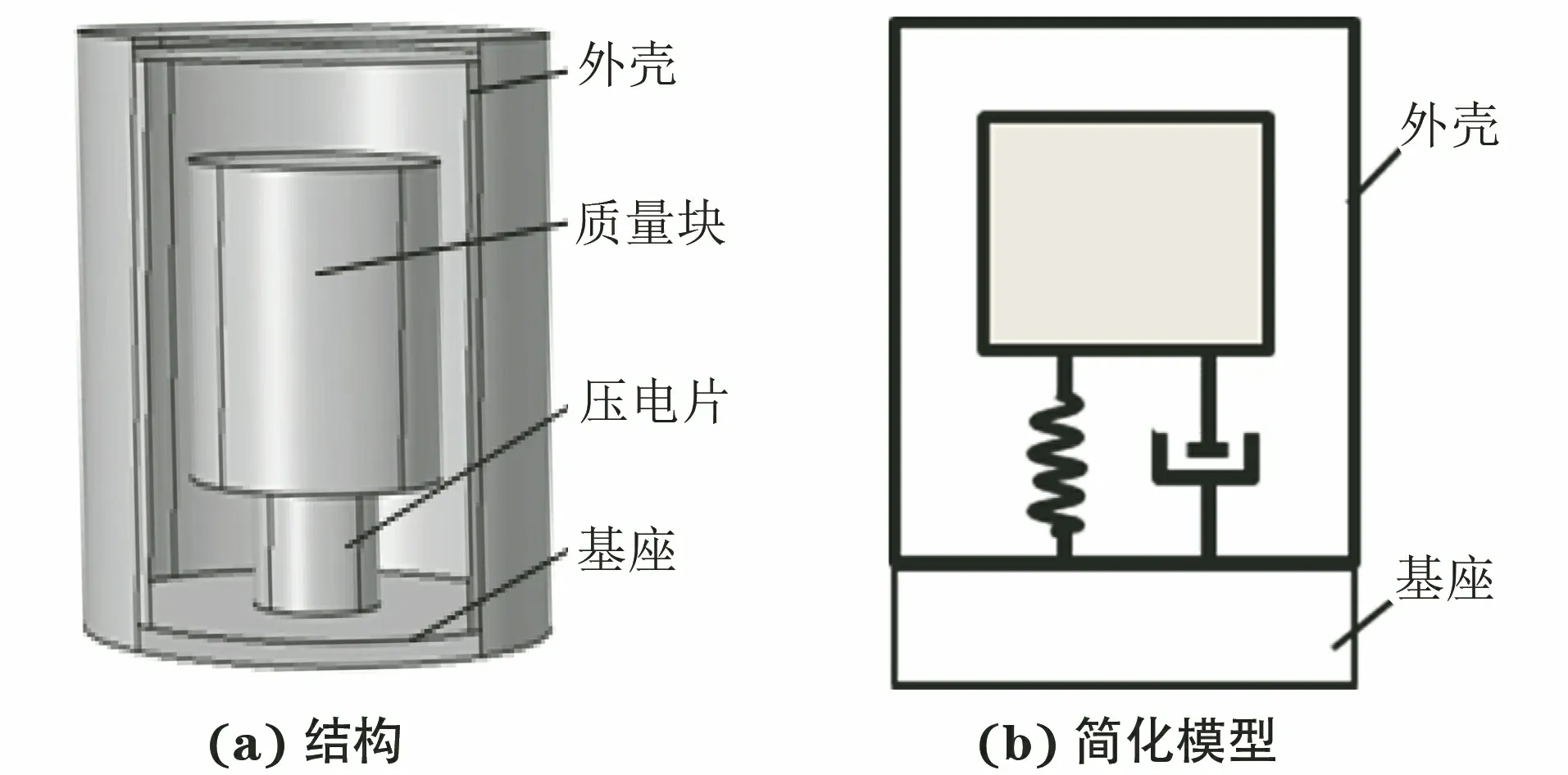
图1 加速度传感器结构示意与简化模型
当加速度传感器感受到物体的振动时,振动通过压电元件传递给质量块,压电元件受到力的作用并产生与传感器加速度线性相关的电压,其运动方程为
式中:m为质量块的质量;K为系统弹簧刚度;R为系统阻尼系数;x为基座的绝对位移;y为质量块相对基座的位移,即压电元件的变形量;t为时间。
在压电元件弹性范围内有
F=Ky·y
(2)
式中:F为作用在压电元件上的力;Ky为压电元件的弹性系数。
压电元件表面的电荷量Q与F成正比,且与压电元件的压电系数d33相关,其表达式为
Q=d33F
(3)
加速度传感器的灵敏度Ma为
式中:U为压电元件的输出电压;a为加速度;ω为振动角频率;ω0为传感器固有频率;ζ为阻尼比。
由式(4)可知,加速度传感器的灵敏度随频率变化而变化,且在远离谐振点的低频频带内变化较为平缓。因此,通常选用ω<ω0/3的频段作为加速度传感器的工作频段,加速度传感器的灵敏度以ω=0时的值表示[见式(5),式中C为压电元件的电容]。
1.2 矢量水听器灵敏度分析
基于压电加速度传感器进行矢量水听器设计,以三维压电加速度传感器作为矢量通道输出,以压电陶瓷圆管作为标量通道输出。为保证3个矢量通道的性能有较好的一致性,将矢量水听器外形设计为球型。
在实际应用中,常用分贝制的等效声压灵敏度表征矢量水听器的灵敏度信息,因此需将加速度传感器灵敏度转化为矢量水听器等效声压灵敏度,再计算传感器是否满足设计需求。
在理想条件下,矢量水听器为零浮力刚性球体,在水中呈自由状态,其振幅与相位与水质点的振幅与相位皆相同。矢量水听器等效声压灵敏度Mp与加速度传感器灵敏度Ma的转化关系为
灵敏度等级MpL为
式中:ρ0为水介质密度;c为水中的声速。
实际设计中,由于安装尺寸限制,矢量水听器的密度也往往受限,难以实现完全的零浮力状态。此时,矢量水听器的密度会对矢量水听器的振动状态产生影响,需要对此进行分析并进行补正。
同振球型矢量水听器在水中近似为自由状态的刚性球体,由水声学理论分析可知,刚性球体在水中的振动状态与球心处的水质点振动状态有关。kr≪1(r为球半径,k为波数)的刚性球体满足以下关系式。
式中:v为刚性球体的振速;v0为球心处水质点的振速;ρ为球体密度。
因此,当水质点加速度为a时,受矢量水听器密度的影响,矢量水听器的实际振动幅度与水质点的不同,矢量水听器振动加速度为,实际输出电压为
由此可得,当矢量水听器密度与介质密度不一致时,实际等效声压灵敏度为
当矢量水听器密度大于水介质密度时,矢量水听器密度越大,实际灵敏度越低。设计矢量水听器时,通常利用空心金属壳或填充浮力材料等方式减小矢量水听器的密度,使其接近水介质的密度。
2 矢量水听器设计
设计的矢量水听器核心元件为3维压电加速度传感器,加速度灵敏度为25 V·g-1,x,y通道谐振频率为1.3 kHz,z通道谐振频率为2 kHz。为尽量减小矢量水听器密度,使用低密度浮力材料进行填充,设计的矢量水听器直径为78 mm,质量为410 g。
根据式(7)计算得到矢量水听器等效声压灵敏度理论值约为-179.6 dB。 矢量水听器密度约为1 650 kg·m-3,高于水的密度,导致矢量水听器的实际灵敏度偏低,故需计算矢量水听器密度对灵敏度的影响以得到与实际灵敏度更接近的结果。
利用式(10)可理论计算考虑密度影响的矢量水听器的等效声压灵敏度(见图2)。由图2可知,100 Hz频率下灵敏度约为-182.9 dB。与理想条件(即矢量水听器为零浮力)下的等效声压灵敏度相比,该矢量水听器实际等效声压灵敏度降低约3.3 dB。

图2 矢量水听器等效声压灵敏度理论计算曲线
3 矢量水听器性能检测
基于以上分析,设计了三维同振式球型矢量水听器。为确保水听器在水中呈自由状态且姿态稳定,使用8颗弹簧将该矢量水听器悬挂在订制的支架上(见图3)。
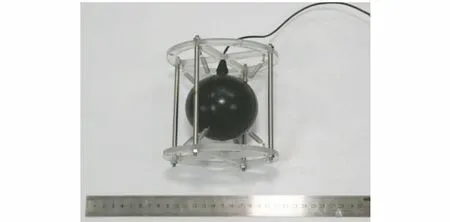
图 3 矢量水听器实物
在驻波管中对该矢量水听器201 000 Hz频段的灵敏度及指向性进行了测试,其3个矢量通道的灵敏度实测结果与理论计算结果如图4所示。
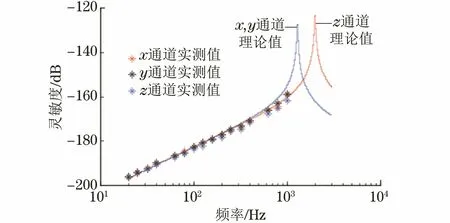
图4 矢量水听器灵敏度实测结果与理论计算结果
经对比可以看出,矢量水听器等效声压灵敏度实际值符合6 dB每倍频程的增长规律,与依据公式(10)计算所得的灵敏度理论值高度吻合。由此可见,在考虑了密度因素对灵敏度的影响后,根据加速度传感器灵敏度计算的矢量水听器等效声压灵敏度已十分接近真实情况,可以作为设计矢量水听器的依据。
在20800 Hz频段内,该矢量水听器的x,y,z3个矢量通道的灵敏度一致性良好,可满足使用要求。另外,矢量通道的指向性与正交性同样是矢量水听器的重要指标。在201 000 Hz频段内,对x,y,z3个矢量通道的指向性进行了测试,其中,100 Hz频率处的指向性如图5-7所示。

图5 矢量水听器x,y通道100 Hz频率处的指向性

图6 矢量水听器x,z通道100 Hz频率处的指向性

图7 矢量水听器y,z通道100 Hz频率处的指向性
指向性测试结果表明,所研制的水听器在20800 Hz频带内,指向性均为良好的“8”字型,凹点深度大于40 dB,且x,y,z3个矢量通道两两正交。在8001 000 Hz范围内,凹点深度开始减小,1 000 Hz处凹点深度为11 dB。文章以100 Hz频率处的指向性作为代表反映该矢量水听器的指向性。
研究表明,单个矢量水听器定向角度误差随凹点深度的增加而减小,通常认为当凹点深度大于40 dB时,定向误差可忽略。
4 结语
完成了一种三维同振型矢量水听器的设计与制作,实物性能与理论分析结果基本符合。该水听器在20 Hz的低频范围仍有较好的灵敏度和“8”字型指向性,可以应用于浮标、潜标、UUV(无人水下航行器)等平台,进行低频水声矢量信号监测。
猜你喜欢
东北大学学报(自然科学版)(2022年6期)2022-07-08
现代电影技术(2021年11期)2021-12-27
北京航空航天大学学报(2021年7期)2021-08-13
航天返回与遥感(2021年1期)2021-03-16
中国科技纵横(2019年3期)2019-03-25
人大建设(2018年11期)2019-01-31
科学与技术(2018年22期)2018-06-17
农业科技与装备(2016年8期)2017-03-09
小学教学参考(语文)(2016年9期)2016-09-30
考试周刊(2016年69期)2016-09-21
