海上漂浮式风力机张力腿平台静动力特性分析
2016-04-18 06:43吴中旺高月文
动力工程学报 2016年2期
关键词:模态分析
吴中旺, 叶 舟, 成 欣, 高月文, 李 春
(1. 上海理工大学 能源与动力工程学院, 上海 200093;
2. 上海市动力工程多相流动与传热重点实验室, 上海 200093)
海上漂浮式风力机张力腿平台静动力特性分析
吴中旺1,2,叶舟1,2,成欣1,2,高月文1,2,李春1,2
(1. 上海理工大学 能源与动力工程学院, 上海 200093;
2. 上海市动力工程多相流动与传热重点实验室, 上海 200093)
摘要:基于Von-Mises失效理论,利用Ansys有限元软件研究了张力腿平台结构强度和振动模态.结果表明:平台立柱迎风、背风侧分别发生拉伸、压缩变形,并在立柱与延伸腿交接面以上部分,随着高度增加,平台变形增大;立柱与x轴方向延伸腿交接处和平台顶端为平台危险区域;由于平台结构的对称性及低阶模态的危险性,为防止平台发生共振响应,应特别关注第1和第3阶模态特性;风轮转动和波浪运动均不会引起平台共振.
关键词:海上风力机; 张力腿平台; 模态分析; 屈服强度; 振动特性
随着海上风电场建设的不断发展,从陆上向海上已成为风电发展的主要趋势[1].在深水海域(深度>60 m),固定式支撑结构风力机已经无法满足经济性要求,漂浮式风力机将是这一区域的最佳选择[2].张力腿平台(Tension Leg Platform, TLP)漂浮式风力机是由垂直系泊顺应式漂浮式平台结构支撑的风力发电机,能够在陆上安装和调试且抗恶劣环境能力强.国内外众多学者对TLP开展了大量的研究,主要集中在平台动态响应、平台结构形式和平台立柱的动力学分析等方面.Jain[3]采用确定性的一阶波浪力分析TLP的动态响应,考虑了6个自由度的耦合、非线性的张力变化及水动力的影响.胡志敏等[4]对海浪载荷的辐射效应进行了深入研究,并以附加质量、附加阻尼等水动力参数的形式计算了辐射效应对TLP载荷的影响.曾晓辉等[5-6]考虑了多种非线性因素对TLP动力响应的影响,推导了TLP的6个自由度非线性运动方程.高月文等[7]通过辐射和绕射理论,结合边界元方法,研究不同海洋环境条件下TLP在风波流联合作用下的运动响应和系泊张力变化.Lefebvre等[8]针对美国可再生能源实验室(National Renewable Energy Laboratory, NREL)给出的5 MW海上风力机参数,提出简单快速的漂浮式平台立柱结构的初步设计方法.Bachynski等[9-10]的研究表明风轮转动和振动敏感度对TLP的刚度和黏性阻尼产生一定影响,并且通过改变平台结构参数来提高张力腿平台海上漂浮式风力机的性能.严磊[11]研究了海上漂浮式风力机的张力腿平台,探讨了其结构设计方法.葛沛[12]采用Lanczos方法分别研究了重力载荷、海浪载荷和风载荷单独作用于张力腿平台立柱和延伸腿的应力分布及各自固有频率.Huang等[13]通过强耦合法研究表明TLP振型与塔架有关、固有频率与系泊长度无关,同时改变平台尺寸和参数以优化结构动力学特性.但国内外学者还没有对张力腿平台结构强度和共振特性进行过研究.笔者通过有限元软件分析风波联合作用下TLP静动力学特性,为平台结构设计提供更加准确的理论参考.
1载荷分析
TLP是保证张力腿平台海上漂浮式风力机安全运行的基础,不仅承受机舱、塔架、叶片及自身重力,还受到风载荷、海浪载荷和系泊预紧力的作用,作为海上漂浮式风力机的重要承载部件,要有足够的强度和刚度.参考NREL 5 MW海上风力机的具体设计参数[14]和文献[12]中优化后的张力腿平台海上漂浮式风力机的基础模型,风力机及张力腿平台主要设计参数分别见表1和表2,整机及TLP结构分别见图1和图2.以平台重心作为原点建立三维坐标系,如图3所示.沿x、y、z轴有3个平移自由度,分别为纵荡、横荡和垂荡,绕x、y、z轴有3个转动自由度,分别为横摇、纵摇和艏摇.

表1 5 MW海上风力机主要设计参数

表2 5 MW海上风力机张力腿平台的主要设计参数
1.1海浪载荷
研究海洋工程的过程中,由于黏性、表面张力以及柯氏力的影响很小,因此经常忽略其作用,认为海水是理想流体,用势流理论来描述海浪问题(入射波势和绕射波势以复数形式表示).主要海浪载荷积分表达式如下:
(1)
(2)

图1 整机结构

图2 TLP结构剖视图
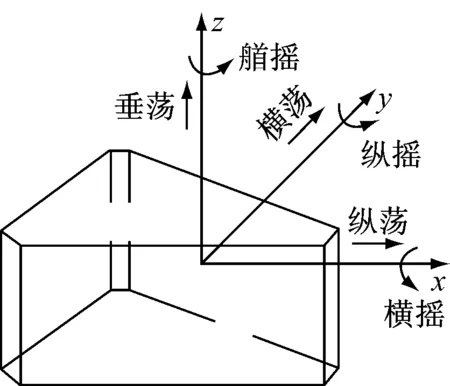
图3 TLP六自由度
(3)

1.2风载荷
计算风力机风轮风载荷的方法有动量理论、动量-叶素理论、CFD模拟等方法.动量理论考虑风力机轴向动量变化,主要用来估算风力机的理想功率、效率和风载荷,笔者采用动量理论方法估算风轮中心推力,按API-RP2A计算风速,平均风速一般取1 h的平均风速,重现期为100 a,参考高度为海平面以上10 m处,其他高度处的平均风速通过修正参考点的风速获得,具体计算式如下:
(4)
式中:z为静水面以上的垂向高度,m;zR为平均风速的参考高度,取10 m;Uw(h,zR)为参考点处的平均风速,m/s;Uw(h,z)为静水面高度为z处的平均风速,m/s.
作用在风轮轮毂处的水平推力载荷为
(5)
式中:FXH为作用在风轮轮毂处的水平推力载荷,N;CFB一般取8/9;ρ空为空气密度,kg/m3;A为风力机风轮扫掠面积,m2.
作用在塔架的风阻力载荷为
(6)
式中:Ch为暴露在风中构件的高度系数;Cs为暴露在风中构件的形状系数;D(z)为高度在z处的塔架直径,m.
1.3张力腿平台系泊拉力
平台的系泊系统由4组张力腿组成,每组张力腿包含2根张力系泊.张力系泊上端固定在平台主体上,下端与海底基座相连,每根张力系泊的顶端预张力约为500 kN.张力系泊结构坐标值见表3.
表3张力系泊对应平台及海底连接处坐标
Tab.3Coordinate values of the tension leg platform and seabed-base corresponding to each tension mooring
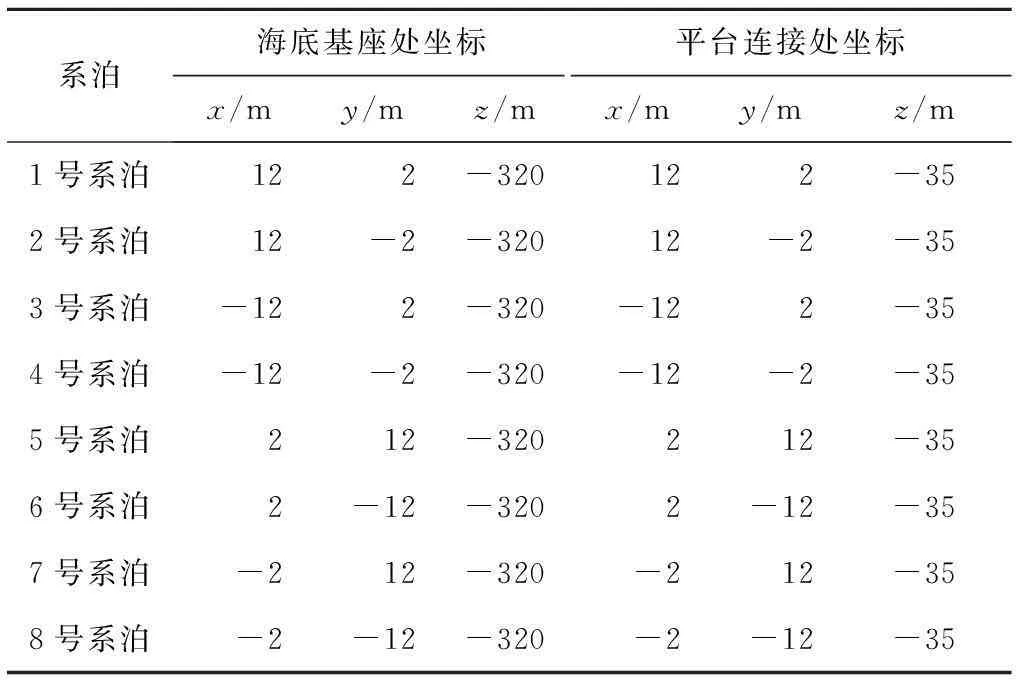
系泊海底基座处坐标平台连接处坐标x/my/mz/mx/my/mz/m1号系泊122-320122-352号系泊12-2-32012-2-353号系泊-122-320-122-354号系泊-12-2-320-12-2-355号系泊212-320212-356号系泊2-12-3202-12-357号系泊-212-320-212-358号系泊-2-12-320-2-12-35
2结构静力学分析
2.1基础方程
采用对称结构张力腿平台,假设海上漂浮式风力机张力腿平台材料是连续、均匀且各项同性的,忽略随时间变化的载荷、惯性力和阻尼,其结构静力学方程为
Ku0=F
(7)
式中:K为刚度矩阵;u0为位移矢量;F为静力载荷矩阵.
2.2结果与分析
在静力分析中,使用Ansys Workbench结构静力学模块,假设平台底部固定约束,风载荷和海浪载荷均沿x轴正方向,风载荷以远端载荷形式施加在轮毂中心处.对TLP在承载情况下的变形及应力进行计算,结果如表4所示,变形及应力云图如图4所示.
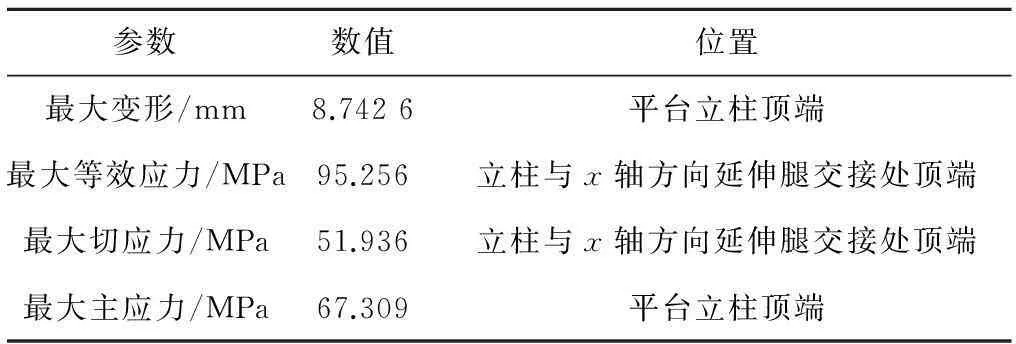
表4 张力腿平台变形及应力

(a) 变形云图

(b) 等效应力云图

(c) 切应力云图

(d) 主应力云图
由图4和表4可知:迎风侧发生拉伸变形,背风侧发生压缩变形;平台立柱与延伸腿交接面顶端以上部分,随着高度增加,平台变形增大;最大等效应力集中在平台立柱与x轴方向延伸腿的交接处和平台顶端,此为平台危险区域.
TLP材料的许用应力按美国船级社(American Bureau of Shipping, ABS)规范确定,根据ABS 《浮式生产系统建造和入级指南》(Guide for building and classing of floating production installations, APRIL2004)的安全系数规定:结构安全系数为2.0[15].ABS规范规定的许用应力校核准则为
(8)
式中:σ为许用应力,MPa;σs为屈服强度,MPa;fs为安全系数,fs=2.
平台材料为Q235,屈服强度σs为235 MPa.由表4还可以看出,平台最大等效应力是影响平台结构安全的关键,且σe,max=95.256 MPa<σ=117.5 MPa,根据Von-Mises失效理论可知此平台的结构静力学设计是合理的.
3结构模态分析
在海洋工程结构设计中,环境条件极其复杂,除考虑静态因素外,风载、浪载、地震载荷及自身重力都是必须考虑的动态因素.风力机是一个多结构、多自由度机构,一旦结构发生共振,危害将十分巨大.模态分析的目标之一是确定系统的模态参数,为结构振动特性分析、振动故障诊断以及机构动力特性的优化设计提供依据.
3.1理论模型
采用有限元方法离散化处理平台,由最小势能理论可得:

(9)
在外力为零的条件下,平台处于无任何外载的自由振动状态,此时式(9)有非零解,反映了其结构频率和振型等固有特性.工程上分析平台固有特性时,通常不计阻尼,因此式(9)可简化为

(10)
假设式(10)的解为如下简谐运动
u=Usinωit
(11)
式中:U为模态形状(无量纲位移);ωi为圆周频率,rad/s.
将式(11)带入式(10)得:
(12)
如式(12)中的U有非零解,则其系数行列式为零,即

(13)
式中:λ=ω2,ω为关于λ的多项式,根为λi=λ1,λ2,…,λn.将λi代入式(13)得
(14)
由式(14)即可求得模态形状为系统固有频率.
3.2结果与分析
利用Ansys有限元软件对平台进行模态分析,普通模态动力分析与载荷无关,可以不选任何载荷集,所以在模态分析中模态提取方法采用Block Lanczos法;由于只关心低阶模态特性,故提取前15阶模态;由于低频振动比高频振动危险,模态中的前几阶振动对结构的动力影响较大,因此在模态分析中只选取前10阶模态振型进行分析.TLP固有频率及振型描述见表5,振型云图见图5.
表5张力腿平台固有频率及振型描述
Tab.5Natural frequency and mode shape description of the tension leg platform
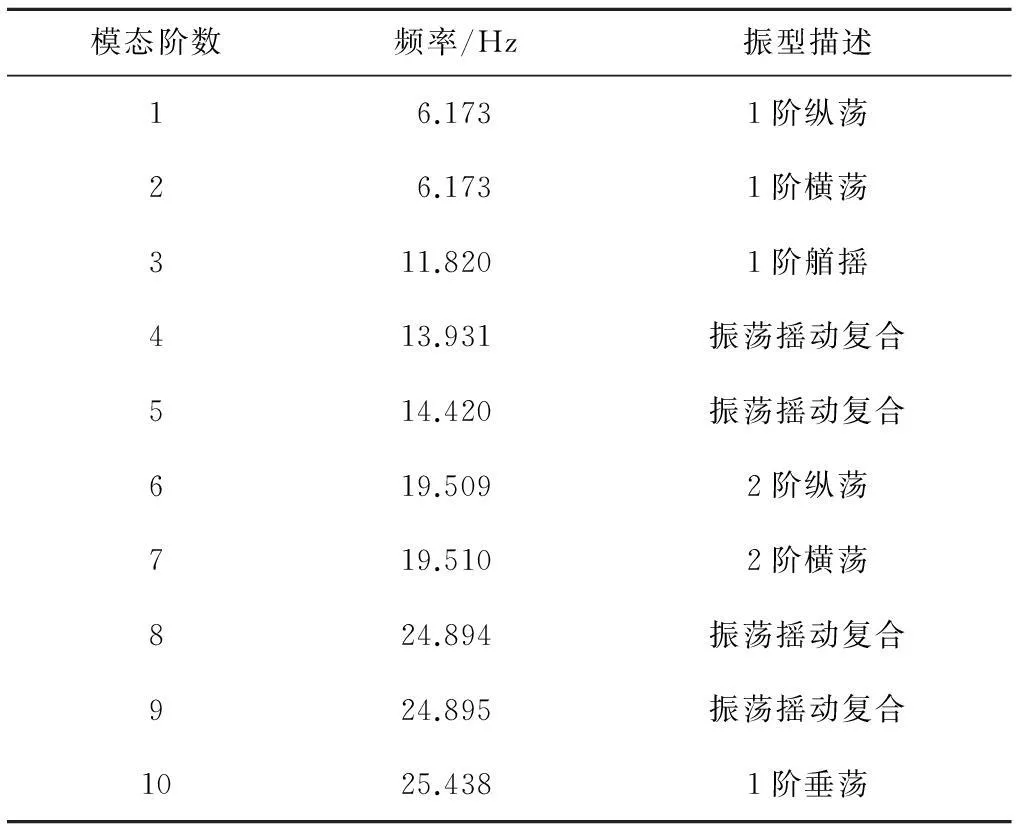
模态阶数频率/Hz振型描述16.1731阶纵荡26.1731阶横荡311.8201阶艏摇413.931振荡摇动复合514.420振荡摇动复合619.5092阶纵荡719.5102阶横荡824.894振荡摇动复合924.895振荡摇动复合1025.4381阶垂荡

(a) 第1阶振型

(b) 第2阶振型

(c) 第3阶振型

(d) 第4阶振型

(e) 第5阶振型
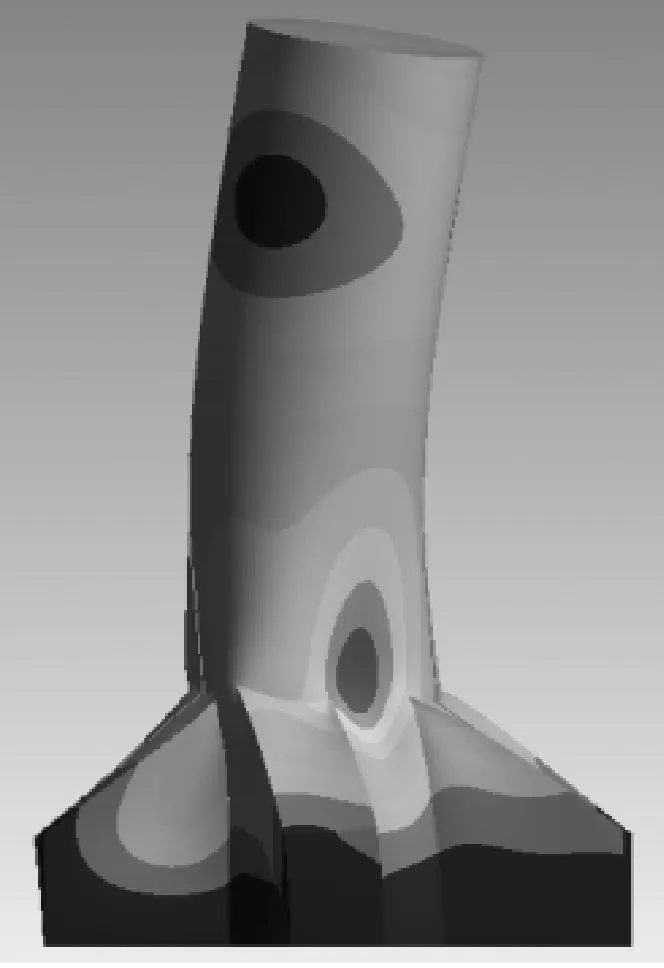
(f) 第6阶振型
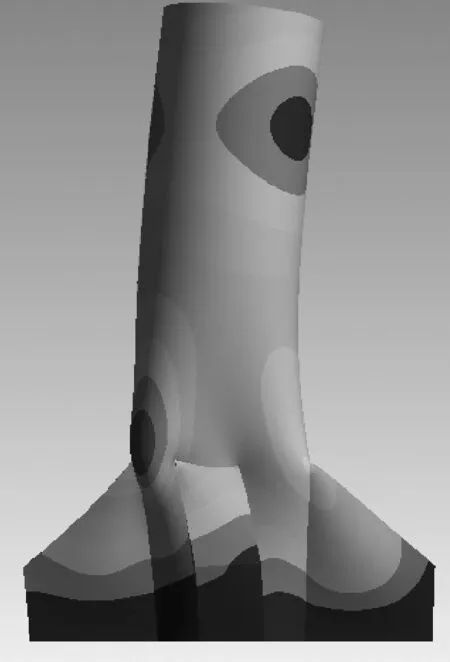
(g) 第7阶振型

(h) 第8阶振型

(i) 第9阶振型

(j) 第10阶振型
由表5可知,平台的第1、第2阶频率,第6、第7阶频率以及第8、第9阶频率在数值上两两几乎相等.相同模态的出现是由于结构的对称性所致,它们具有几乎相同的振型,只是振动方向相互成90°,所以可以把它们两两看成一个模态.考虑到引起平台共振的激励源主要是低频运动,故在防止平台发生共振方面,主要考虑平台第1和第3阶固有频率.
由结构动力学理论可知,风力机的自由振动部分对结构影响不大,故在一般的结构设计中,可只考虑受迫振动.当激振力的频率与固有频率相重合时,位移和内力都将无限增大,即产生共振现象[16].在小阻尼情况下,通常将0.75<ω/ωn<1.25(ωn为平台固有频率)的区间称为共振区[17].风轮额定转速为12.1 r/min.共振的主要激励源是风轮额定频率、3倍额定频率和波浪频率,其中风轮额定频率为0.201 7 Hz,3倍额定频率为0.605 Hz.
在大多数海况下,波浪频率较小,一般在0.2 Hz以下,而风暴中的波浪频率为0.05~0.2 Hz,此时由于海洋复杂环境载荷以低频为主,而海洋低频载荷引起的响应主要包括以下3部分:差频波浪力引起的低频慢漂响应;海流引起的涡激运动响应;风和海流引起的湍流效应,这些低频频率一般在0.033 Hz左右[18].平台前10阶固有频率与风轮额定频率和海浪频率的比较见表6.由表6可知,风轮和海浪均不会引起平台共振响应.
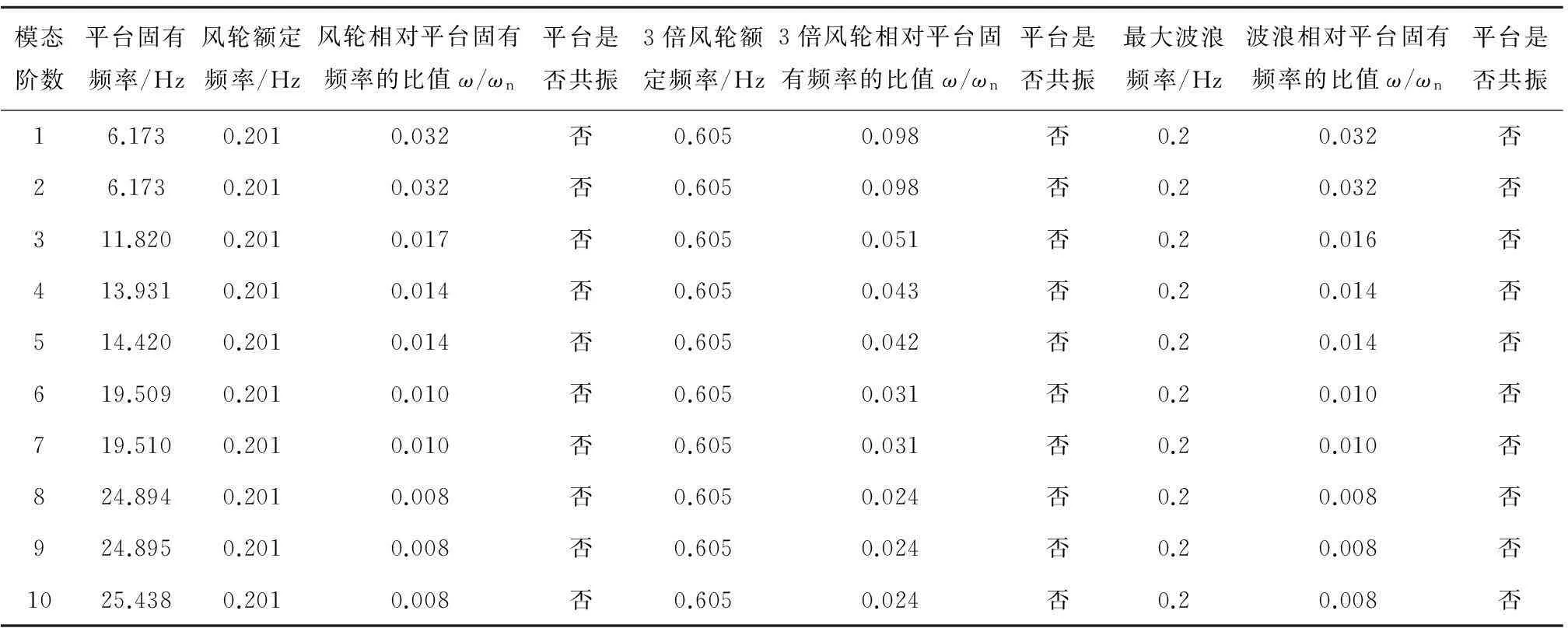
表6 平台固有频率与风轮及波浪频率的比较
4结论
(1) TLP在承载情况下迎风、背风侧分别发生拉伸、压缩变形;平台立柱与延伸腿交接面以上部分,随着高度增加,平台变形增大.
(2) 最大等效应力集中在平台立柱与x轴方向延伸腿交接处和平台顶端,此为平台危险区域.根据Von-Mises失效理论可知,平台的结构静力学设计是合理的.
(3) 平台的第1、第2阶频率,第6、第7阶频率以及第8、第9阶频率在数值上两两几乎相等.相同模态的出现是由于结构的对称性所致,又因低阶模态的危险性,故在考虑平台共振安全性时主要考虑第1、第3阶模态.
(4) 平台所受激励源主要是风轮和海浪,而风轮旋转和波浪运动都是低频运动响应,不会引起张力腿平台发生共振响应.
参考文献:
[1]安利强,孙少华,周邢银.发电机故障时海上风电机组动态特性分析[J].动力工程学报,2014,31(11):891-896.
AN Liqiang, SUN Shaohua, ZHOU Xinyin. Analysis on dynamic characteristics of offshore wind turbines with generator faults [J]. Journal of Chinese Society of Power Engineering, 2014, 31(11): 891-896.
[2]张亮,吴海涛,荆丰梅,等.海上漂浮式风力机研究进展及发展趋势[J].海洋技术,2010,29(4):122-125.
ZHANG Liang, WU Haitao, JING Fengmei,etal. Study on offshore floating wind turbine and its development[J]. Marine Technology, 2010, 29(4): 122-125.
[3]JAIN A K. Nonlinear coupled response of offshore tension leg platforms to regular wave forces[J]. Ocean Engineering, 1997, 24(7): 577-592.
[4]胡志敏,董艳秋,张建民.张力腿平台水动力参数计算[J].海洋工程,2002,20(3):14-22.
HU Zhimin, DONG Yanqiu, ZHANG Jianmin. Calculation of TLP's hydrodynamic parameters[J]. Ocean Engineering, 2002,20(3): 14-22.
[5]曾晓辉,沈晓鹏,刘洋,等.考虑多种非线性因素的张力腿平台动力响应[J].海洋工程,2006,24(2):82-88.
ZENG Xiaohui, SHEN Xiaopeng, LIU Yang,etal. Dynamic response of TLP considering multifold nonlinear factors[J]. Ocean Engineering, 2006, 24(2): 82-88.
[6]曾晓辉,刘洋,沈晓鹏,等.有限位移下张力腿平台的非线性动力响应[J].工程力学,2007,24(3):179-184.ZENGXiaohui,LIUYang,SHENXiaopeng,etal.Nonlineardynamicresponseoftensionlegplatformwithfinitedisplacement[J].EngineeringMechanics,2007,24(3):179-184.
[7]高月文,李春,叶舟,等.风波流多环境海上漂浮式风力机张力腿平台动态特性[J].水资源与水工程学报,2014,25(2):91-97.
GAO Yuewen, LI Chun, YE Zhou,etal. Dynamic characteristics of offshore wind turbine's tension leg platform under wind, wave and current environment[J]. Journal of Water Resources and Water Engineering, 2014, 25(2): 91-97.
[8]LEFEBVRE S, COLLU M. Preliminary design of a floating support structure for a 5 MW offshore wind turbine[J]. Ocean Engineering, 2012, 40(2): 15-26.
[9]BACHYNSKI E E, MOAN T. Ringing loads on tension leg platform wind turbines[J]. Ocean Engineering, 2014, 84(4): 237-248.
[10]BACHYNSKI E E, MOAN T.Design considerations for tension leg platform wind turbines[J]. Marine Structures, 2012, 29(1): 89-114.
[11]严磊.风力发电机支撑体系结构设计研究[D].天津:天津大学出版社,2008.
[12]葛沛.海上浮式风力机平台选型与结构设计[D].哈尔滨:哈尔滨工程大学出版社,2012.
[13]HUANG Hu, ZHANG Sherong. Dynamic analysis of tension leg platform for offshore wind turbine support as fluid-structure interaction[J]. China Ocean Eng, 2011, 25(1): 123-131.
[14]JONKMAN J, BUTTERFIELD S, MUSIAL W,etal. Definition of a 5 MW reference wind turbine for offshore system development[R]. Colorado, USA: National Renewable Energy Laboratory Tech Rep, 2009.
[15]《海洋石油工程设计指南》编委会.海洋石油工程深水油气田开发技术[M].北京:石油工业出版社,2011.
[16]王朝胜,黄东胜,邹富顺,等.风力机塔架模态分析及应用[J].电力学报,2009,2(6):463-466.
WANG Chaosheng,HUANG Dongsheng,ZOU Fushun,etal. Wind turbine tower modal analysis and application[J]. Journal of Electric Power, 2009, 2(6): 463-466.
[17]徐赵东,马乐为.结构动力学[M].北京:科学出版社,2007.
[18]张社荣,黄虎.海上张力腿平台风电机组结构动力特性研究[J].太阳能学报,2010,31(9):1198-1203.
ZHANG Sherong, HUANG Hu. Dynamic characteristics research of offshore wind turbines tension leg platform structure [J]. Acta Energiae Solaris Sinica, 2010, 31(9):1198-1203.
Analysis on Static and Dynamic Characteristics of Tension Leg Platform for Offshore Floating Wind Turbines
WUZhongwang1,2,YEZhou1,2,CHENGXin1,2,GAOYuewen1,2,LIChun1,2
(1.School of Energy and Power Engineering, University of Shanghai for Science and Technology,Shanghai 200093, China; 2. Shanghai Key Laboratory of Multiphase Flow and Heat Transfer in Power Engineering, Shanghai 200093, China)
Abstract:Based on Von-Mises theory, the structure strength and vibration mode of a tension leg platform (TLP) for offshore floating wind turbines (OFWTs) were studied using Ansys finite element software. Results show that tensile and compression deformations would occur at the windward and leeward side of the platform stand column, and for the areas of platform above the joint between stand column and extension leg, the deformation increases with the rise of elevation; the regions at the joint between stand column and x-direction extension leg and at the top of platform are dangerous; due to the symmetry of the platform structure and the danger of the lower order modes, the characteristics of the first- and third-order modes should be specially concerned, to prevent the platform from suffering a resonant response; both the wind wheel rotation and the wave motion would not cause resonance.
Key words:offshore floating wind turbine; tension leg platform; modal analysis; yield strength; vibration characteristic
文章编号:1674-7607(2016)02-0151-06
中图分类号:TK83
文献标志码:A学科分类号:480.60
作者简介:吴中旺(1988-),男,安徽蚌埠人,硕士研究生,主要从事海上风力机结构设计方面的研究.叶舟(通信作者),男,副教授,博士,电话(Tel.):021-55271665;E-mail:ye_pei_yu@qq.com.
基金项目:上海市研究生创新基金资助项目(JWCXSL1402);上海市教育委员会科研创新资助项目(13YZ066);国家自然科学基金资助项目(511176129);上海市科委基金资助项目(13DZ2260900)
收稿日期:2014-11-25
修订日期:2015-06-10
猜你喜欢
建材发展导向(2016年6期)2017-01-17
东方教育(2016年18期)2017-01-16
成长·读写月刊(2016年12期)2017-01-12
科技创新与应用(2016年34期)2016-12-23
农机使用与维修(2016年10期)2016-11-10
科技视界(2016年24期)2016-10-11
科技视界(2016年14期)2016-06-08
科技视界(2016年4期)2016-02-22
光学仪器(2015年4期)2015-09-24
科技视界(2015年25期)2015-09-01