一种无人机微弱扩频信号角跟踪方法
2016-04-13 05:29:44王春龙马传焱时荔蕙郝博雅
无线电通信技术 2016年2期
王春龙,马传焱 ,时荔蕙 ,郝博雅 ,周 洲
(1.西北工业大学 无人机特种技术重点实验室,陕西 西安 710065;
2.中国人民解放军63961部队,北京 100012)
一种无人机微弱扩频信号角跟踪方法
王春龙1,2,马传焱2,时荔蕙2,郝博雅2,周洲1
(1.西北工业大学 无人机特种技术重点实验室,陕西 西安 710065;
2.中国人民解放军63961部队,北京 100012)
摘要:传统的无人机测控信号容易被干扰和截获。在现有无人机测控系统的基础上,给出了一种无人机微弱扩频信号的单通道单脉冲跟踪系统的实现方法,同时突破了扩频信号并行快捕和误差电压的高精度相关解调等难题。该方法可以充分利用现有测控信道而无需额外增加设备量,具有跟踪系统灵敏度高、跟踪精度高、算法简单和设备简单等特点,特别适合于对无人机的隐蔽高精度测角跟踪。
关键词:无人机;扩频;角跟踪;抗干扰
0引言
无人机具有体积小、造价低、使用方便和对环境要求低等优点,已被广泛应用于侦察监视、抢险救灾、地形勘测和目标打击等领域。单通道单脉冲角跟踪技术[1]因其精度高、工作信噪比较低、动态响应快以及实现简单、可靠,在无人机测控领域得到广泛应用。盛怀洁等[2]研究了无人机角跟踪系统的体制分类,在干扰响应分类的基础上定义了4个系统抗干扰性能指标,并给出了计算方法和物理意义,定量分析无人机角跟踪系统抗干扰性能;尤明懿等[3]提出了一种可直接评估角跟踪接收机的测角精度,且便于跟踪系统指标分配的角跟踪接收机性能评估方法;汪沛[4]设计了一种单通道角跟踪系统接收机AGC控制环路,能够准确补偿信号传输引起的信号电平变化而几乎不会引入角误差信息失真;汤恩生等[5]通过分析和通道与差通道相位差对跟踪性能的影响,提出了一种与跟踪系统频率无关的采用过零点检测加数字移相补偿方法;黄开达[6]建立了镜面反射影响下的遥测角误差信号模型,分析了多路径效应对天线低仰角3个特征区跟踪的影响,提出基于卡尔曼滤波的自适应数据融合算法,有效改善遥测设备低仰角跟踪的稳定性和提高测量精度;赵呈哲等[7]针对工程应用具体需求,对传统解扩方法进行改进,以适应单通道单脉冲扩频角跟踪技术在无人飞行器测控领域的应用;李中伟等[8]对基于多信息源的目标测量模型建模、数据融合与最优估计算法等解决低仰角跟踪的措施进行了研究;张晏旭等[9]给出了高速数传信号角跟踪系统设计方案,并对高速数传信号跟踪误差进行了分析。
当前航空无线电测控领域中对目标飞行器的跟踪主要采用单通道单脉冲体制,下行数据采用非扩频的正交相移键控调制方式,遥测信号很容易被截获和干扰。扩频系统可以工作在负信噪比下,信号淹没在噪声中,因此具有很高的隐蔽性、抗干扰性、抗多径和抗截获的能力。随着扩频技术在GPS系统、GLONASS系统、中继卫星系统和我国的双星定位系统中的成功应用,国内无人机测控领域开始深入研究扩频技术在测控中的应用[10,11]。而如何在现有无人机工程实现的基础上,设计一个可靠的无人机扩频角跟踪系统,同时能够直接利用扩频信息实现角度误差信号的提取,准确、及时地完成对飞行目标的测角跟踪,成为无人机测控系统必须要解决的一个问题。
1无人机微弱扩频角跟踪系统组成
无人机微弱扩频角跟踪系统组成如图1所示,系统主要包括耦合器、射频滤波器、低噪声放大器LNA、本振、下变频器、自动增益控制AGC、中频放大器、中频滤波器、伪码快速解扩器、2个乘法器、2个0/π调制器、加法器、T/4移相器和低频方波发生器。图1中,Σ为地面跟踪天线输出的和信号、ΔA和ΔE分别为方位和俯仰误差信号、LNA为低噪放、AGC为自动增益控制、UA和UE分别为地面数字跟踪接收机解算输出的角误差电压。

图1 无人机微弱扩频角跟踪系统组成框图
地面跟踪天线输出的和信号Σ依次通过耦合器、射频滤波器、低噪声放大器LNA、下变频器、中放、中频滤波器后与伪码快速解扩器的输入端连接,伪码快速解扩器的2个输出端分别与2个乘法器的输入端连接;在低噪声放大器LNA与下变频器之间还连接有本振,中频滤波器的另一输入端还与中频放大器的输出端连接,该中频放大器设有自动增益控制回路AGC;一个0/π调制器的输入端和调制端分别与方位误差信号ΔA和T/4移相器的输出端连接,后者的输入端与低频方波发生器的输出端连接;另外一个0/π调制器的输入端和调制端分别与俯仰误差信号ΔE和低频方波发生器的输出端连接;2个0/π调制器的输出端经过加法器后再与耦合器的另一输入端连接;2个所述的乘法器的另一输入端分别与T/4移相器和低频方波发生器的输出端连接,输出端解算出方位、俯仰误差电压。
2扩频角跟踪原理分析
参考图1,本节主要就无人机微弱扩频角跟踪原理进行分析。单通道跟踪接收通道中,和路信号表示为:
Σ=VΣm(t)c(t)cos(ωct+φ0)+n∑(t),
(1)
式中,V∑为和路信号强度,ωc为载波角频率,φ0为信号初相,nΣ为和路的噪声,m(t)为调制数据,c(t)为扩频码序列。
馈源输出的方位、俯仰误差信号分别表示为:
ΔA=VAc(t)m(t)cos(ωct+φ0)+nA(t),
(2)
ΔE=VEc(t)m(t)cos(ωct+φ0)+nE(t),
(3)
式中,VA和VE分别为方位、俯仰角误差信号;nA和nE分别为方位、俯仰支路的噪声。
将数字跟踪接收机输出的两路频率一致,正交关系的低频方波信号分别与方位误差、俯仰误差信号完成0/π调制,通过合路器,形成一个复合角误差信号:
Q=m(t)c(t)[VAD(t)+VED(t+90°)]cos(ωct+φ0)+
nA(t)+nE(t),
(4)
式中,D(t)、D(t+90°)为幅度为±1的低频方波信号。
该合成的角误差信号再经过耦合器与和路信号耦合,成为包含角误差信号的复合调制信号,表达式如下:
P=m(t)c(t)[VAD(t)+VED(t+90°)+V∑]cos(ωct+φ0)+
n∑(t)+nA(t)+nE(t),
(5)
式(5)再经低噪声放大、模拟下变频和放大滤波后,信号中心频率变为ω0,噪声成为窄带高斯噪声,此时信号形式为:
P=m(t)c(t)[VAD(t)+VED(t+90°)+V∑]cos(ω0t+φ0)+
nc(t)cos(ω0t+φ0)-ns(t)sin(ω0t+φ0),
(6)
式中,nc(t)、ns(t)分别为带限高斯白噪声的同相和正交分量。
然后复合信号进入解扩单元,去掉伪随机码,解扩后的信号表达式为:
P=m(t)[VAD(t)+VED(t+90ο)+VΣ]cos(ω0t+φ0)+
nc2(t)cos(ω0t+φ0)-ns2(t)sin(ω0t+φ0);
(7)
再经载波跟踪后,I支路输出信号为:
P=m(t)[VAD(t)+VED(t+90ο)+VΣ]+nc2(t)。
(8)
低频方波信号,频率一般很低(一般为1 kHz),远低于数据速率,大部分调制有误差信号的低频方波信号通过了相关滤波器,因此,角误差信息仍然保留在解扩后的信号中。将解调后的遥测基带信号m(t)与跟踪后的I支路信号再相乘,消去数据,得到:
P=[VAD(t)+VED(t+90ο)+VΣ]+nc3(t)。
(9)
该信号分别与本地D(t)、D(t+90°)同步检波:
PA=[VAD(t)+VED(t+90ο)+VΣ]D(t)+nc3(t)D(t),
(10)
PE=[VAD(t)+VED(t+90ο)+VΣ]D(t+90)+nc3(t)D(t+90)。
(11)
经低通滤波后,输出的方位、俯仰角误差电压分别为:
UA=VA+nA,
(12)
UE=VE+nE。
(13)
3无人机微弱扩频角跟踪方法
无人机伪码并行搜索捕获原理如图2所示,上述系统通过以下步骤实现无人机微弱扩频角跟踪。

图2 无人机伪码并行搜索捕获原理框图
① 地面跟踪定向天线的和差网络输出一对方位误差信号ΔA、俯仰误差信号ΔE和和信号Σ,在信道双工器内,2个射频误差信号分别与地面数字跟踪接收机输出的一对正交低频方波信号在0/π调制器内完成0/π调制,调制后的误差电压通过加法器后,在耦合器内与和信号Σ耦合到一起,经过射频带通滤波器、LNA、下变频器、信道AGC控制和带通滤波器,最后将中频信号输出给去地面数字跟踪接收机。
② 地面数字跟踪接收机对输入的微弱扩频信号进行快速解扩。对于传统的解扩系统,解扩处理的时延主要在伪码的搜索捕获阶段,为了降低解扩的时延,采用n路伪码相位并行搜索的方式。伪码部分并行搜索捕获原理如图2所示,以256位伪随机码的扩频系统为例,考虑到节省硬件资源,并行支路的个数n取8,8个并行支路的相位分别为PN0、PN1…PN7;PN8、PN9…PN15;PN248、PN249…PN255。通过8个支路伪码相位的并行处理,搜索阶段所占用的时间为相位串行滑动的1/8,可以满足工程设计需求。为了使得系统能够在低信噪比下,快速准确地完成解扩。除了在搜索阶段采用伪码相位并行搜索的方式,对于搜索阶段的视频信号,也采用了多倍的能量累积。综合考虑性能的提升和硬件资源的消耗,选用了8倍的视频累积。这样,使得跟踪系统能够在微弱信号时完成对飞行目标的准确捕获和跟踪。
③ 地面数字跟踪接收机对完成快速解扩后的微弱信号通过幅度检波算法解算出误差电压并输出到伺服设备,完成闭环跟踪。地面数字跟踪接收机对解扩后对准支路的I和Q两路数据,采用幅度检波算法,消去残留频差对角误差信号的影响,然后积分抽取,带通滤波、与本地的低频方波同步检波、低通滤波、解算出角误差电压,组帧后输出给伺服设备,完成对飞行器的闭环跟踪。
4试验测试数据
为了验证上述微弱扩频信号角跟踪方法的有效性,采用与QPSK信号对比测试,测试方法如下:机载设备放置在天线的远场处,保证与地面设备有一定的俯仰角度,手动调整地面天线,使机载设备处于跟踪天线的主波束内。方位采用自跟踪模式,链路工作正常后开始测试,每隔60 s记录一个数据。
表1和表2分别为角跟踪系统在高信噪比和低信噪比下QPSK信号和扩频信号的测试数据。
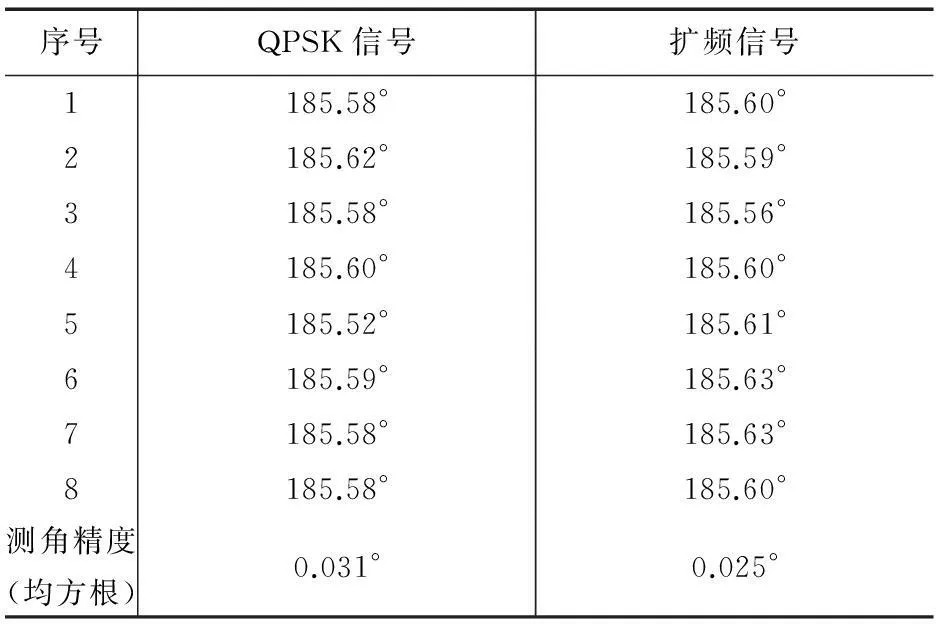
表1 高信噪比下2种QPSK和扩频信号跟踪测角精度对比
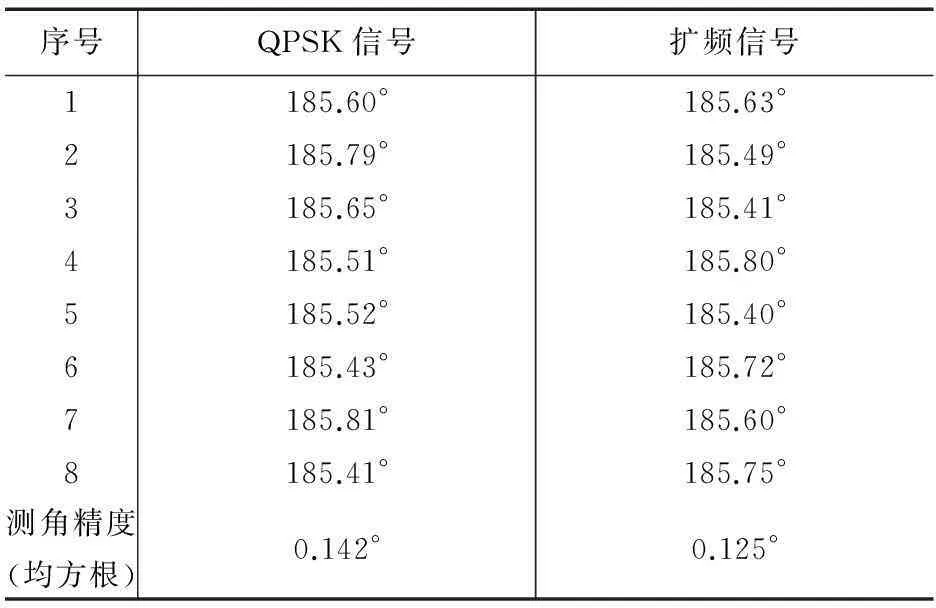
表2 低信噪比下QPSK和扩频2种信号跟踪测角精度对比
从测试数据可以看出,扩频信号的测角精度与QPSK信号的测角精度基本相当。但是由于扩频信号的低探测性,使得采用扩频角跟踪的系统具有较强的隐蔽性和抗截获的能力。
5结束语
本文提出的无人机微弱扩频角跟踪方法有效利用当前测控系统的现有信道设备,在单通道单脉冲信号合成时几乎没有什么变动,同时又避免了原有无人机跟踪体制中隐蔽性差、容易被干扰的缺点。采用的伪码并行搜索和多倍视频累积策略,即保持了原有解扩的灵敏度指标,又缩短了解扩锁定的时间,同时将误差电压的解算部分与解扩算法统一起来,算法实现灵活、简单和性能可靠,有利于工程实现,具有广泛的应用前景。
参考文献
[1]黎刚果,汪洋,朱晓峰.一种无人机统一测控系统[J].无线电工程,2014,44(9):74-77.
[2]盛怀洁,廖明飞.无人机角跟踪系统抗干扰性能分析[J].无线电工程,2014,44(4):37-40.
[3]尤明懿,帅明,王玉峰.单通道角跟踪接收机测角精度评估研究[J].通信对抗,2014,33(1):19-22.
[4]汪沛.单通道角跟踪系统接收机AGC控制环路设计[J].电子设计工程,2014,22(12):97-99.
[5]汤恩生,赵鸿,周军.角跟踪接收机中的自动校相技术[J].红外与激光工程,2014,43(1):328-331.
[6]黄开达.基于卡尔曼滤波的遥测低仰角跟踪技术[J].计算机与数字工程,2014,42(3):386-389.
[7]赵呈哲,何源洁.无人飞行器扩频角跟踪技术研究与应用[J].无线电工程,2013,43(1):39-41.
[8]李中伟,周军辉,田道坤.无线电测量设备的低仰角跟踪研究[J].现代电子技术,2012,35(15):7-9.
[9]张晏旭,吴铁柱.高速数传信号角跟踪及误差分析[J].电子科技,2012,25(11):52-56.
[10]管吉兴,陈荣,高跃清,等.一种扩频接收机的设计分析[J].无线电通信技术,2011,37(5):58-61.
[11]杨万君,伍滨,王旭宁.一种扩频通信系统的实现[J].无线电通信技术,2013,39(3):17-19,49.
An Angle Tracking Method for UAV feeble Spread Spectrum Signal
WANG Chun-long1,2,MA Chuan-yan2,SHI Li-hui2,HAO Bo-ya2,ZHOU Zhou1
(1.Science and Technology on UAV Laboratory,Northwestern Polytechnic University,Xi’an Shaanxi 710065,China;2.Unit 63961,PLA,Beijing 100012,China)
Abstract:The conventional UAV TT&C signals can be easily disturbed and captured.Based on UAV TT&C system,this paper puts forward an implement method of single channel and single pulse tracking system for UAV feeble spread spectrum signal.At the same time,the difficulties such as parallel and fast acquisition of spread spectrum signal and high-precision correlation demodulation of error voltage are also broken through.This method can fully use the existing TT&C channel without adding equipment,and it has such characteristics as high sensitivity,high tracking accuracy,simple algorithm,simple equipment,etc.,which is very suitable for high-precision angle measuring and tracking of UAV.
Key words:UAV;spread spectrum;angle tracking;anti-interference
中图分类号:TN914.42
文献标识码:A
文章编号:1003-3114(2016)02-51-4
作者简介:王春龙(1979—),男,博士,主要研究方向:无人机技术论证与管理研究。马传焱(1972—),男,博士,主要研究方向:飞行器测控与导航技术研究。
基金项目:预研基金资助项目(9140A25011315HK03380)
收稿日期:2015-12-02
doi:10. 3969/j.issn. 1003-3114. 2016.02.13
引用格式:王春龙,马传焱,时荔蕙,等. 一种无人机微弱扩频信号角跟踪方法[J].无线电通信技术,2016,46(2):51-54.
猜你喜欢
中国科技博览(2016年24期)2016-12-28 21:52:43
科技创新与应用(2016年31期)2016-12-03 03:35:17
电子技术与软件工程(2016年18期)2016-11-14 23:43:00
科技视界(2016年18期)2016-11-03 22:40:24
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
经营者(2016年12期)2016-10-21 09:53:46
科技视界(2016年22期)2016-10-18 14:30:27
企业导报(2016年9期)2016-05-26 20:58:26
科技视界(2015年25期)2015-09-01 17:50:31