大功率机电静压伺服机构动态特性研究
2016-04-13 05:26张玉强赵守军刘会祥
导弹与航天运载技术 2016年4期
张玉强,赵守军,何 俊,张 朋,刘会祥
(北京精密机电控制设备研究所,北京,100076)
大功率机电静压伺服机构动态特性研究
张玉强,赵守军,何 俊,张 朋,刘会祥
(北京精密机电控制设备研究所,北京,100076)
针对大功率机电静压伺服机构在摇摆未来火箭发动机中的潜在应用,研究了其高动态实现的技术途径。结果表明,相对于大惯量摇摆发动机自身偏低的结构固有频率,泵控液压作动器可以有足够高的液压固有频率。采用结构一体化的伺服电机泵和伺服机构本体设计,可以消除传统连接导管等对液压固有频率的负面影响,结合成熟的伺服电机驱动控制技术,可以实现满意的频宽。通过进行理论仿真分析、样机设计制造和试验研究,在1000 kg·m2大惯量模拟负载条件下,输入5%满幅值指令时,10 kW级别样机的-3 dB幅频带宽达71.2 rad/s,-45°相频带宽达18.5 rad/s,且负载谐振抑制性能良好。由此可见,机电静压伺服机构具备应用于火箭摇摆发动机之类的大功率场合的高动态能力。
机电静压;动态特性;火箭发动机
0 引 言
机电静压伺服机构(Electro Hydrostatic Actuator,EHA),也称电动静液伺服作动器,与机电伺服机构(Electro Mechanical Actuator,EMA)同属新兴电力驱动伺服机构,具备使用维护方便、节能等优点,但又保留传统电液伺服,一般指采用伺服阀的系统重载能力强的特点,易于实现高可靠设计,是未来运载火箭大推力摇摆发动机推力矢量伺服控制的优选技术方案[1~4]。机电静压伺服机构的缺点在于动态特性稍差,难以满足运载火箭和飞机等的大惯量负载应用。其中一个原因是其采用伺服电机驱动液压泵控制液压作动器的往复运动,本质上是一个泵控系统,液压频率是阀控系统的1/2,本身频宽偏窄[5]。
空客A380客机、F18和F35战斗机等飞机已成功应用了机电静压伺服机构技术[2]。其中,F18战斗机所用EHA舵机的功率约为4.2 kW,-3 dB幅频带宽为42 rad/s,-45°相频带宽为28 rad/s[6]。对于火箭发动机用途的样机,虽然有大功率和余度方面的设计,但-3 dB幅频带宽仅为37.7 rad/s(6 Hz)[4],相比于中国现役运载火箭70 rad/s的一般要求显得稍窄。中国已研制出中小功率样机,但-3 dB幅频带宽一般不高于31 rad/s(5 Hz)[7]。
本文所研制的5 kW机电静压伺服机构-3 dB幅频带宽可达到50 rad/s,-45°相频带宽达到27 rad/s[8],同时还完成了30 kW大功率机电静压伺服机构的故障容错机制研究[2],但未进行动态性能研究。在此基础上,开展了大功率机电静压伺服机构的动态特性研究。进行了理论仿真分析、样机设计制造和试验研究,表明机电静压伺服机构具备应用于发动机摇摆火箭控制的大功率场合的高动态能力。
1 试验样机设计
机电静压伺服机构样机工作原理如图1所示,三维设计模型如图2所示,核心部件伺服电机泵剖面如图3所示。
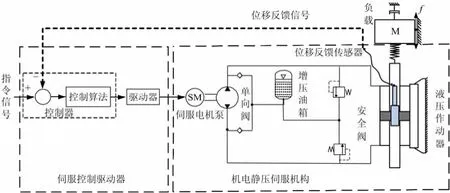
图1 试验样机基本工作原理

图2 试验样机三维设计模型

图3 伺服电机泵三维剖面
控制器、驱动器另成设备。机构本体采用一体化的整体结构设计。伺服电机泵、增压油箱、安全阀及单向阀和位移反馈传感器等部件与液压作动器集成为一个设备。
控制器负责作动器的位置闭环及特定补偿算法,驱动器负责伺服电机的驱动及速度闭环控制,液压泵双向变速,驱动液压作动器正反向往复运动,位移反馈传感器测量活塞(杆)运动位置。增压油箱、单向阀和安全阀负责油液补偿、分配和安全压力控制,是机电静压伺服机构的标准配置[2,3,7]。
伺服电机泵是核心部件,也称电液泵,将定量液压柱塞泵的转子柱塞组件与永磁同步伺服电机在结构上设计为一个整体。伺服电机浸油工作,其在驱动和控制上与常规伺服电机完全相同,在外形上也几乎无差别,仅端面有两个油口与液压系统连接,与传统的分体式电动泵相比,对内省去了转轴动密封,对外省去了接管嘴,也由两个可组合、可分离的电机和液压泵变成一个不可分割的产品,即伺服电机泵。由于减少了中间传动环节和转动惯量,更有利于实现高动态性能。
伺服电机泵与液压作动器两腔直接相连,省去了传统液压泵的液压连接导管,消除了因薄壁管路变形和管路连接引入的控制体积,最大限度地消除了对液压作动器固有频率的负面影响[5]。
试验样机基本设计参数如表1所示,考虑效率,机构峰值功率可为15 kW。

表1 试验样机基本设计参数
2 仿真分析
2.1 位置闭环控制模型分析
摇摆火箭发动机等大惯量负载的伺服机构控制回路简化线性模型如图4所示。其中,火箭发动机取其最低阶模态振型,简化为一个二阶环节。伺服控制回路的设计,即伺服机构动态特性的实现,围绕负载固有的结构谐振特性展开,即在抑制负载谐振的同时尽可能提高响应带宽[5,9,10]。

图4 机电静压伺服机构控制回路规范化数学模型
Ko= KpKnKxDp/A,其中,Kp,Kn,Kx,Dp,A分别为误差放大系数、等效电机转速传递系数、位移反馈系数、液压泵排量、作动器作用面积。
ωc,ζc是液压作动器与负载共同作用的结果,有:

式中 β为液压控制回路中的等效油液弹性模量;R为伺服机构摇摆负载的力臂;J为负载转动惯量;V为液压作动器两腔(包含伺服电机泵控制油口到两腔的油路)的总容积。
伺服机构及负载的基本控制模型与伺服阀控制的伺服机构在形式上相同,但ωh为阀控的1/2[5]。
ωr,ωh,ωc为液压伺服控制中3个最基本的频率,在位置闭环中,要得到足够高的频宽,ωc必须足够大,因此,ωr,ωh也必须足够大,这2个值分别取决于负载特性和作动器的设计。
比例和陷波网络是数字化控制伺服机构的基本控制律。如图4所示,控制器中的参数由软件设置,具体有Kp,ωr1,ζr1,ωr2和ζr25个参数。其中,Kp用于提高系统带宽和位置精度,但受限于负载固有频率,一般最大只能取其固有频率的1/3;陷波网络相当于带阻滤波器,用于抑制负载固有频率点附近频段的谐振。
大功率机电静压伺服机构动态特性分析如下:
a)泵控作动器的液压固有频率虽然相对于阀控偏低,但可满足火箭发动机之类的大功率用途。这是因为火箭发动机之类的大惯量负载自身固有频率ωr偏低。对于液压作动器,无论阀控还是泵控,均可以实现较高的液压固有频率ωh。某火箭发动机的摇摆转动惯量为1000 kg·m2,固有频率ωr为100 rad/s,在如表1所示的作动器设计条件下,油液等效弹性模量β取700 MPa,如采用阀控,液压固有频率ωh=266.3 rad/s,得到液压机械综合谐振频率ωc=93.6 rad/s;若采用泵控,液压固有频率ωh=188.3 rad/s,虽然偏低,但仍然是发动机固有频率ωr的1.8倍,得到的液压机械综合谐振频率ωc=88.3 rad/s,只降低了5.6%,对于系统动态特性实现影响很小。
b)高度集成的伺服电机泵和机构设计,取消了液压导管,减小了控制油液总体积,最大限度地降低了对液压频率ωh的负面影响[5]。
c)伺服电机泵是另外一个关键环节,也需要本身频宽足够高。
2.2 伺服电机泵的速度闭环控制模型
伺服电机采用正弦波永磁同步设计,转子外形尺寸Φ44 mm×154 mm,转动惯量8×10-4kg·m2(含电机转子及液压泵柱塞组件),功率密度高、转子转动惯量小;驱动模块采用绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)模块;控制芯片采用高性能数字信号处理器(Digital Signal Processor,DSP),用软件实现空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM),采用电流环和速度环双闭环PI控制算法,实现较理想的动态响应特性[11,12]。简化的伺服电机泵速度闭环控制模型如图5所示。

图5 伺服电机泵的等效控制模型
实测频率特性曲线如图6所示。

图6 电机频率特性试验曲线与二阶环节仿真比较
由图6可得,伺服电机泵速度闭环的最终动态特性可以近似简化为二阶环节,ωn=135 rad/s、阻尼比ζn=0.707。
2.3 仿真及试验结果分析
以某摇摆火箭发动机的模拟负载为被控对象,转动惯量J = 1000 kg·m2,零位力臂长度R = 876 mm,固有频率ωr= 100 rad/s,阻尼比ζr= 0.04。采用机电静压伺服机构试验样机进行控制,计算得到ωh=188.3 rad/s,ωc=88.3 rad/s,ζc=0.05。
伺服电机泵模型同上。
设计控制算法:位置回路开环增益K0=38.7,陷波算法参数ωr1=ωr2=100 rad/s,ζr1=0.03,ζr2=0.25。
从指令到负载输出的频率特性曲线及阀控伺服机构频率特性仿真曲线(伺服阀等效为时间常数为0.004 s的一阶惯性环节)如图7所示。
由图7可得,机电静压伺服机构的-3 dB频宽达到72.4 rad/s,-45°一阶频带达到20.1 rad/s。与阀控相比,在高频段存在差异,但在中低频段差异较小,不影响使用。

图7 伺服机构摆动发动机负载的频率特性仿真曲线
3 试验研究及分析
3.1 试验设计
采用上述摇摆发动机的模拟负载台(见图8)进行试验,将控制器和驱动器合二为一(见图9),控制参数与上述仿真分析相同。进行阶跃信号和正弦信号扫频测试,将伺服电机泵最大转速设为6500 r/min。

图8 试验样机驱动模拟负载台

图9 控制器、驱动器
3.2 阶跃响应试验
输入幅值3°(满幅值75%)的阶跃信号,位移输出以及伺服电机泵转速实测曲线与仿真曲线的对比分别如图10、图11所示。

图10 阶跃响应特性曲线

图11 阶跃响应中伺服电机泵转速曲线
实测得到最大速度14.5 (°)/s,超调量2.7%,稳态误差精度0.6%,可满足大型运载火箭发动机摇摆控制需求。从图11可以看出,伺服电机泵响应速度较快,加速到最大转速仅需0.028 s,表明大功率高频响伺服电机泵完全可行。
3.3 频率特性试验
采用幅值0.2°(5%满幅值)的正弦信号对试验样机进行扫频测试,得到负载摆角幅频和相频响应曲线,如图12所示。由图12可知,对于0.2°扫频响应曲线,-3 dB幅频宽为71.2 rad/s,且幅频曲线高频段没有峰值,表明负载谐振抑制良好,-45°相频宽为18.5 rad/s。与仿真曲线的差异源于模型的简化误差,但其准确度已可满足工程使用。

图12 幅值0.2°扫频试验响应曲线
需要说明的是,本研究中位置闭环控制算法只采用了比例和陷波控制等基本方法,如果采用精细调理的PID或自适应控制等优化控制算法,还可实现更优良的动静态控制性能。
4 结 论
理论分析和试验研究表明,大功率机电静压伺服机构具备运载火箭发动机摇摆控制所需的高动态能力。高度集成化的伺服电机泵和伺服机构本体设计,为实现高动态的速度闭环控制奠定了基础,也使得油液弹性模量、控制容积等对液压固有频率有负面影响的因素降低到最小。机电静压伺服机构采取并联伺服电机泵,在解决大功率问题的同时兼顾余度设计,同时满足可靠性和使用维护性等需求,可作为中国未来运载火箭推力矢量控制的储备方案。
[1] 曾广商, 赵守军, 张晓莎. 我国载人运载火箭伺服机构技术发展分析[J].载人航天, 2013,19(4): 3-10.
[2] 赵春, 赵守军, 何俊, 等. 双余度机电静压伺服机构故障隔离与重构技术研究[J]. 载人航天, 2015,21(3): 205-211.
[3] Garrison M, Davis M, Steffan S. Human-rated upper stage thrust vector control system architecture selection[R]. AIAA 2007-5848, 2007.
[4] Garrison M, Steffan S. Two-fault tolerant electric actuation systems for space applications[R]. AIAA 2006-4939, 2006.
[5] 王占林. 液压伺服控制[M]. 北京: 北京航空学院出版社, 1987.
[6] Navarro R. Performance of an electro-hydrostatic actuator on the F-18 systems research aircraft[R]. NASA/TM-97-206224, 1997.
[7] 马纪明, 付永岭, 李军, 等.一体化电动静液作动器(EHA)的设计与仿真分析[J]. 航空学报, 2005,26(1): 79-83.
[8] 何俊, 赵守军, 曲颖, 等. 一种高紧凑整体化机电静压伺服机构研究[C].北京: 中国航空学会航空机电、人体与环境工程学术会议, 2013.
[9] 赵迎鑫, 张晓莎, 赵守军, 等. 新型大推力发动机负载动态模型的获取和辨识方法[J]. 流体传动与控制, 2008,5(30): 41-43.
[10] 尹传威, 赵守军, 陈克勤. 双谐振点发动机推力矢量控制伺服机构算法优化研究[J]. 导弹与航天运载技术, 2013(1): 21-26.
[11] 付永岭, 李祝峰, 安高成, 等. 电液泵发展现状与关键技术综述[J]. 机床与液压, 2012,40(1): 143-149.
[12] 管良永, 徐国卿, 袁登科. 永磁同步电机矢量控制系统设计与仿真[J].机电一体化, 2008(12): 51-53.
Dynamic Characteristics of High Power Electro Hydrostatic Actuator
Zhang Yu-qiang, Zhao Shou-jun, He Jun, Zhang Peng, Liu Hui-xiang
(Beijing Research Institute of Precise Mechatronics and Controls, Beijing, 100076)
Aimed at the potential application of high power Electro-Hydrostatic Actuators (EHA) to gimbaling future rocket engines, the technical approaches to realize their high dynamic characteristics are studied. It is showed that a pump controlled hydraulic actuator can have a sufficiently high hydraulic natural frequency compared with the relatively lower structural natural frequency of a large inertia rocket engine. Both a servo motor-pump and a servo mechanism adopt a monolithic structural design to eliminate the negative effects of conventional connecting tubes on hydraulic natural frequency. In combination with matured driving and control techniques of servo motors, a satisfactory frequency bandwidth for a high power EHA can be expected. Theoretical simulation and analysis, a mockup design and manufacturing as well as experiments have been finished. For a large inertia simulation load of 1000 kg·m2, with a command input of 5% maximum gambling angle, a 10 kW mockup can achieve a 71.2 rad/s amplitude frequency bandwidth at -3 dB point and a 18.5 rad/s phase frequency bandwidth at -45° point, with satisfactory effect of suppressing load structural resonance. Therefore, EHA has the high dynamics capability to be used in high power applications such as gambling rocket engines.
Electro hydrostatic actuator; Dynamic characteristics; Rocket engine
V433
A
1004-7182(2016)04-0025-05
10.7654/j.issn.1004-7182.20160407
2016-03-15;
2016-04-08
张玉强(1990-),男,硕士研究生,主要研究方向为运载火箭伺服机构设计
猜你喜欢
汽车实用技术(2021年3期)2021-02-24
微特电机(2020年11期)2020-12-30
航空学报(2020年9期)2020-12-02
房地产导刊(2020年6期)2020-07-25
发电设备(2020年2期)2020-04-06
电子制作(2018年17期)2018-09-28
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01