
颅颌面虚拟牙种植的全功能定位研究
2016-04-11 04:57江小平王桂海
广东工业大学学报 2016年1期
李 芳, 唐 平, 江小平, 王桂海
(广东工业大学 1.自动化学院; 2.校医院,广东 广州 510006)
颅颌面虚拟牙种植的全功能定位研究
李芳1, 唐平1, 江小平2, 王桂海1
(广东工业大学 1.自动化学院; 2.校医院,广东 广州 510006)
摘要:基于CT图像三维重建系统进行颌骨形态等方面的分析,牙种植的稳定性与美学效果取决于种植体在颌骨内的三维空间位置.提出一种交互式全功能定位方法,主要讨论三维模型的坐标转换和数据坐标的提取技术.结合VTK的提取类库功能与针刺取点算法的特点,通过交互式操作获取三维颌骨图像的坐标,实现牙颌面的种植体定位.将其与种植体智能定位后的坐标相比较,进行微调整,减少了后者在植入方向、植入长度等方面存在的误差,有效地为虚拟牙种植导航系统提高了精确度与安全性.
关键词:全功能定位; 针刺取点; 交互式操作; 三维坐标获取
随着计算机硬件技术多媒体技术以及医学图像三维可视化技术的发展,以CT图像为基础所构建的人体结构三维模型在疾病的诊断和治疗工作中占有越来越重要的地位[1].自20世纪60年代 Branemark教授研究的“骨结合”理论,口腔种植系统首次被用于下颌无牙颌患者的修复并取得成功.但在口腔种植手术过程中, 牙种植体的骨内生物定位是种植成功的一个重要环节.由于上、下颌骨三维不规则性以及口腔内软组织等复杂生物力学方面考虑, 牙种植体在数量、位置、形状的设计是临床医生的难点, 如何最大限度利用牙槽骨骨量, 使种植体的植入位置既符合生物力学原理, 又能保证修复学的效果, 并有利于种植体的长期稳定, 越来越受到国内外学者所瞩目[2-3].其中,国外的SimPlant[4]软件和Nobel-Guide软件虽已在临床上投入使用,但是并不能实现任意角度的变换.国内黄俊华等人采用量子遗传算法[5]完成了种植体的智能生成,正确生成缺牙区域的种植体种植,但是由于可能参数选取或者函数设置不当,导致其植入方向等指标的合理性仍有待提高.因此,虚拟手术中牙种植体的定位仍然是临床医生的难点.
本文主要就中山大学第一附属医院提供的CT口腔序列图像进行三维重建后的体数据测量技术并加以研究,应用VTK类库进行定位系统的三维重建和开发,采用针刺取点的算法,实现牙颌面三维结构坐标获取及转换[6-7],交互式操作响应种植体定位等功能,对智能定位后的种植体进行微调整,以达到准确、美观的双重效果.
1虚拟牙种植导航系统的建立
1.1口腔图像三维重建系统
在口腔种植定位过程中,首先需要开源可视化工具VTK实现DICOM医学图像[8]横断面、冠状面、矢状面3个正交面的切片显示,并且利用面绘制和体绘制[9]算法对图像进行三维重建,如图1所示,建立MFC为基础的用户界面的医学图像处理系统.

图1 医学图像处理系统
DICON文件的读取和显示是采用VTK中的类来实现,其中调vtkImagePlaneWidget函数管理正交面的显示,通过鼠标的拖动完成不同切面的变化,即图1中右边的3幅图则分别为横冠矢二维切片的显示.
采用了MC面绘制算法在VTK中的vtkMarchingCubes类封装的移动立方体法抽取等值面,设置阀值、灰度值,分别从切边数据中提取出皮肤和骨骼,实现了颅颌模型的表面绘制;采用Ray casting算法在VTK的vtkVolumeRayCastCompositeFunction,封装体绘制和光线投影法,建立合成功能对象,实现颅颌模型的直接体绘制,通过绘制窗口实现三维体的显示,如图1中左边第1张图则为重建后的三维颅骨图像.
1.2交互式全功能定位的原理
所谓交互式全功能定位是在种植体智能定位的基础上进行交互式修正,其定位方式主要包括智能定位和交互式定位.
在牙颌面进行智能定位, 黄俊华等人通过对牙种植定位模型的研究,提出了一种改进的Bloch量子遗传算法,用于完成了口腔种植体的智能设计,最终优化结果的矢状切面图如图2所示[4].

图2 种植体智能定位
然而,种植体智能定位是指以人工智能算法在虚拟环境中根据所采样的环境参数自动搜索最佳植入点、植入方向以及种植深度与种植体尺寸,但是在实际的操作过程中,也存在一些缺陷,比如不同人的CT图像存在差异,导致种植位置和种植的舒适度也有区别.为了确保种植手术的成功,定位问题尤其关键.因此,此时就要通过医生的经验来进行手动调整,在智能定位之后,可交互式操作利用虚拟切割技术进行观察分析,能有效地判断是否需要进行微调整,得到最后的种植参数.
全功能定位既能修复智能定位由于算法上存在的不足,也能克服交互式定位只是通过测量来确定的繁琐,提高种植准确度.其交互式操作的关键技术是坐标转换和坐标拾取.
2交互式全功能定位的关键技术
2.1三维图像的坐标变换
在计算机重建后的三维模型上,医生在实际进行交互式定位种植体操作时,需要在计算机屏幕上通过鼠标点的位置提取到牙颌面缺牙部分种植体的点,并将其转换为世界坐标系下的坐标值.然后通过计算在CT图像上标识出相应结构的位置,实现这一交互功能的前提就是要进行三维观察,将其从世界坐标系变换到设备坐标系,映射到计算机屏幕上[10],如图3所示.
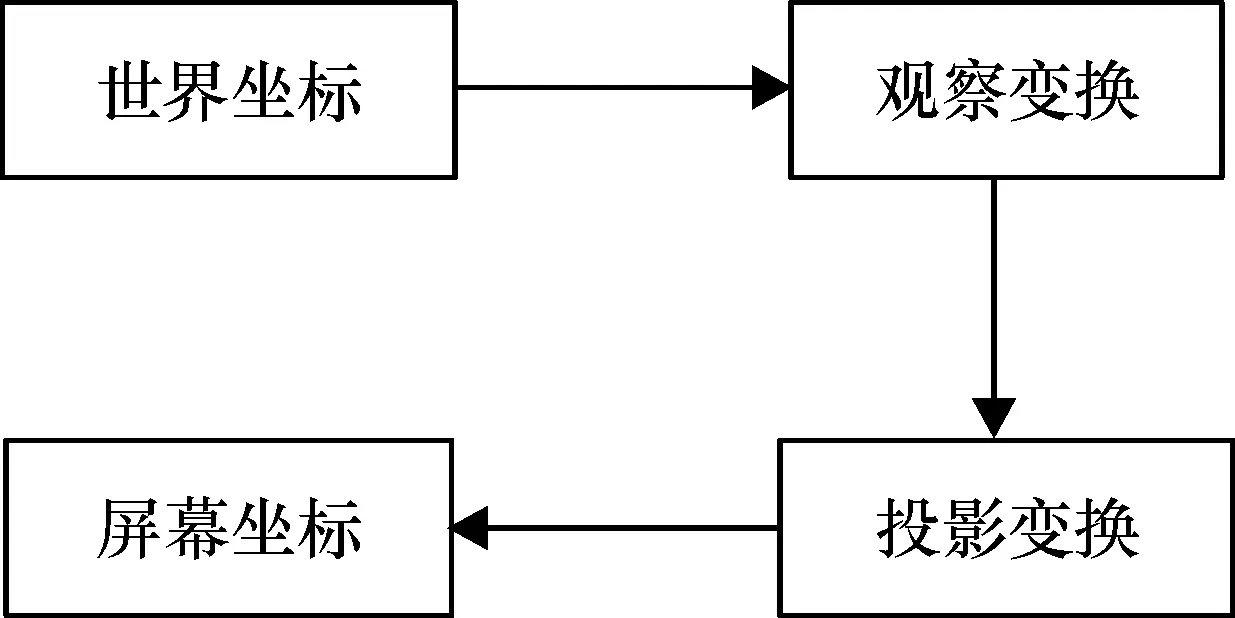
图3 三维观察流程图
其中,在同一坐标系下,采用平移、旋转、缩放等基本几何变换操作.将三维物体投影到二维观察面上,即在不同坐标系下的闭环,则要采取平行透视投影模型,如图4所示.
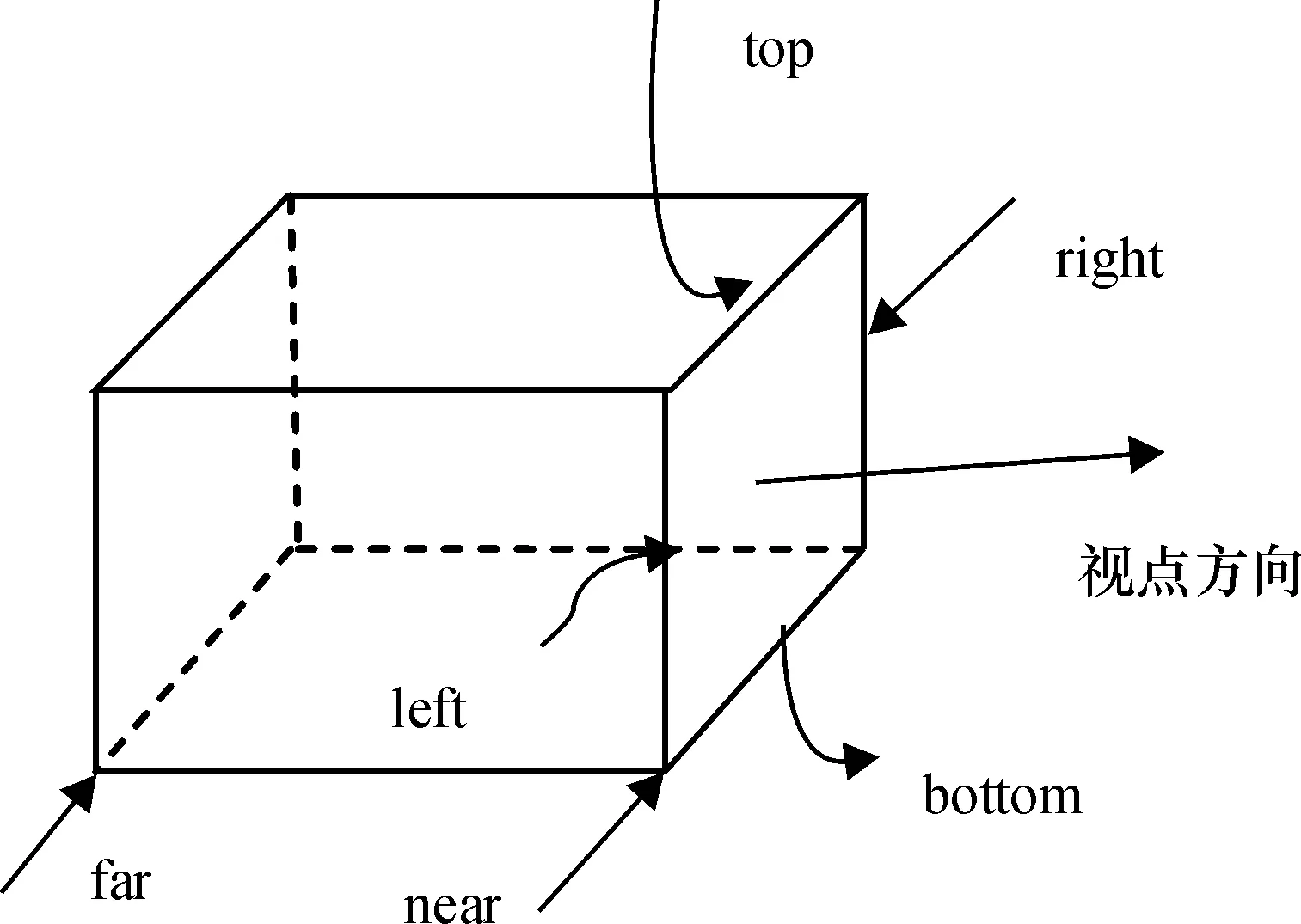
图4 平行透视投影模型
如果整个物体的三维坐标在X、Y和Z方向上的最小值和最大值分别为xmin,ymin,zmin和xmax,ymax,zmax,令
Left=-max(|xmin|,|xmax|),
Right=max(|xmin|,|xmax|),
Bottom=-max(|ymin|,|ymax|),
Top=max(|ymin|,|ymax|),
Near=-max(|zmin|,|zmax|),
Far=max(|zmin|,|zmax|).
此模型的建立,可以将这个屏幕坐标系下的二维点p(x,y)转化为一个物体坐标系下的三维点Q(x′,y′,z′),其公式如下:
x′=Left+x/Width*(Right-Left),
y′=Top-y/Height*(Top-Bottom),
z′=Near .
2.2三维结构坐标的获取
三维结构坐标的获取是三维观察的逆过程.目前交互式三维坐标获取比较成熟的一种算法是针刺取点法[11],即根据鼠标点击得到的二维屏幕坐标转化为所需物体三维建模坐标.该方法获取坐标的速度快,得到的最小单位空间点具有真实性.
二维平面向三维空间的转换中,坐标获取的关键问题就是利用针刺取点法获得Z坐标值,其步骤如下.
(1) 通过2.1中的转换公式得到物体坐标系下的三维输入点Q.
(2) 从Q点以垂直于屏幕的方向发出一条三维空间直线,向三维物体延伸,求得与三维表面的多个交点中的最近点的坐标值.
(3) 最后对该点进行三维观察的逆过程,即可实现点的拾取[12-13].
在求交点的过程中,只是将Z坐标值作为参考,而且Q点引发的直线本垂直XY平面,采用逆向思维,故只需将组成三维物体的三角形面片投影到XY平面,然后判断Q的投影点是否在XY平面上的三角形内即可[14],二维坐标系下,其位置关系如图5所示.
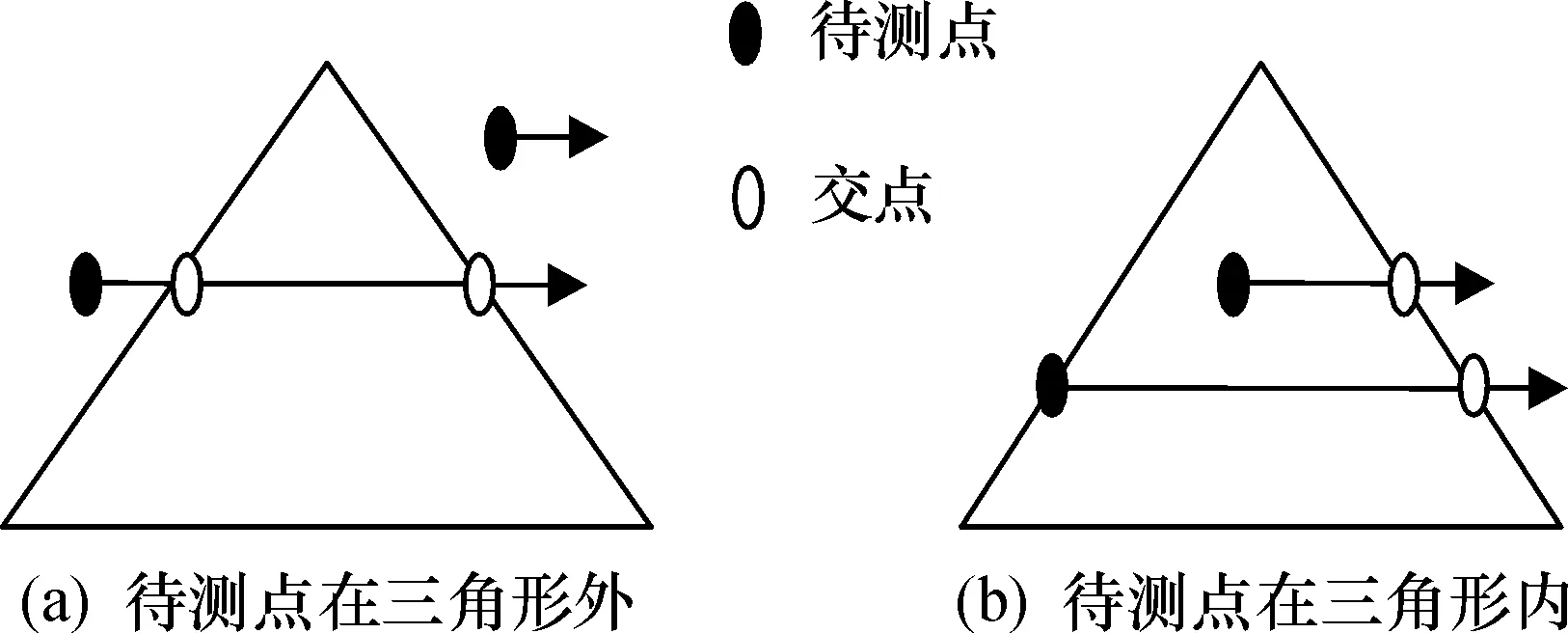
图5 投影点与投影三角形的关系
通过待测点作一条射线平行于X轴,如果该待测点与三角形存在一个交点或者在三角形的一条边上,即可证明待测点在在三角形内.相应判断了Q点引发的直线与三维物体有交点,可根据空间直线与平面的求交法则计算具体交点坐标.设上述三角形所在的平面方程为Ax+By+Cz=D(A、B、C为平面的法向量),然后只需将Q点的x,y坐标代入平面方程,即可得到交点的z坐标.若拾取的交点集为G={g2,g2,…,gn}n≥2,则根据针刺模型,最终拾取的目标点在Z方向上的坐标值最小.
3交互式全功能定位的实现与应用分析
本文在对二维的DICOM格式的口腔序列图像数据进行三维重建,并以三视图的形式进行显示的基础上,基于上述算法,可以实现种植体点的拾取和三维交互等功能.在虚拟牙种植设计方案中,通过智能定位确定种植体的植入位置、角度、长度,并依靠临床医生经验进行交互式微调,校正误差.
根据系统的分析,牙种植虚拟手术全功能定位模块需要实现以下功能.
(1) 用鼠标点击屏幕上二维图像,系统通过屏幕上的点拾取到用户所需的三维颌骨图像上的点,将其转换为世界坐标系下的坐标值,同时得到种植体在三维颅骨上的坐标, 实验结果如图6所示,拾取点的坐标为(100,165,168).
其中,一个采用针刺取点算法的类VtkPointPicker[15],通过调用IsSelect()方法判断与三维物体存在交点的可能性,若相交,则返回该点处各种数据,用GetPCoords()方法获得拾取点的坐标,并返回该点的世界坐标值.
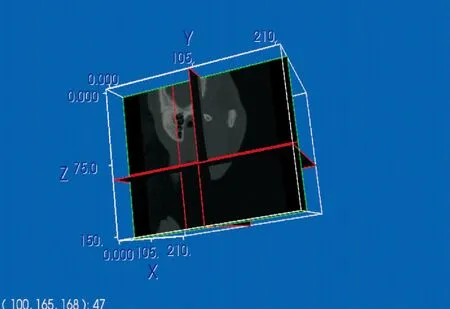
图6 VTK的交互式测量结果
(2) 种植体智能生成后,用户可通过修改种植体起始点的三维坐标等参数进行最终调整.
采用智能定位后生成的种植体如图1所示,系统同时会自动得到其起始点坐标、种植体长度、角度等参数,此时临床医生可与经验得到的相应系列参数进行比较,并通过键盘进行数据修改,实现全功能种植体定位如图7所示.
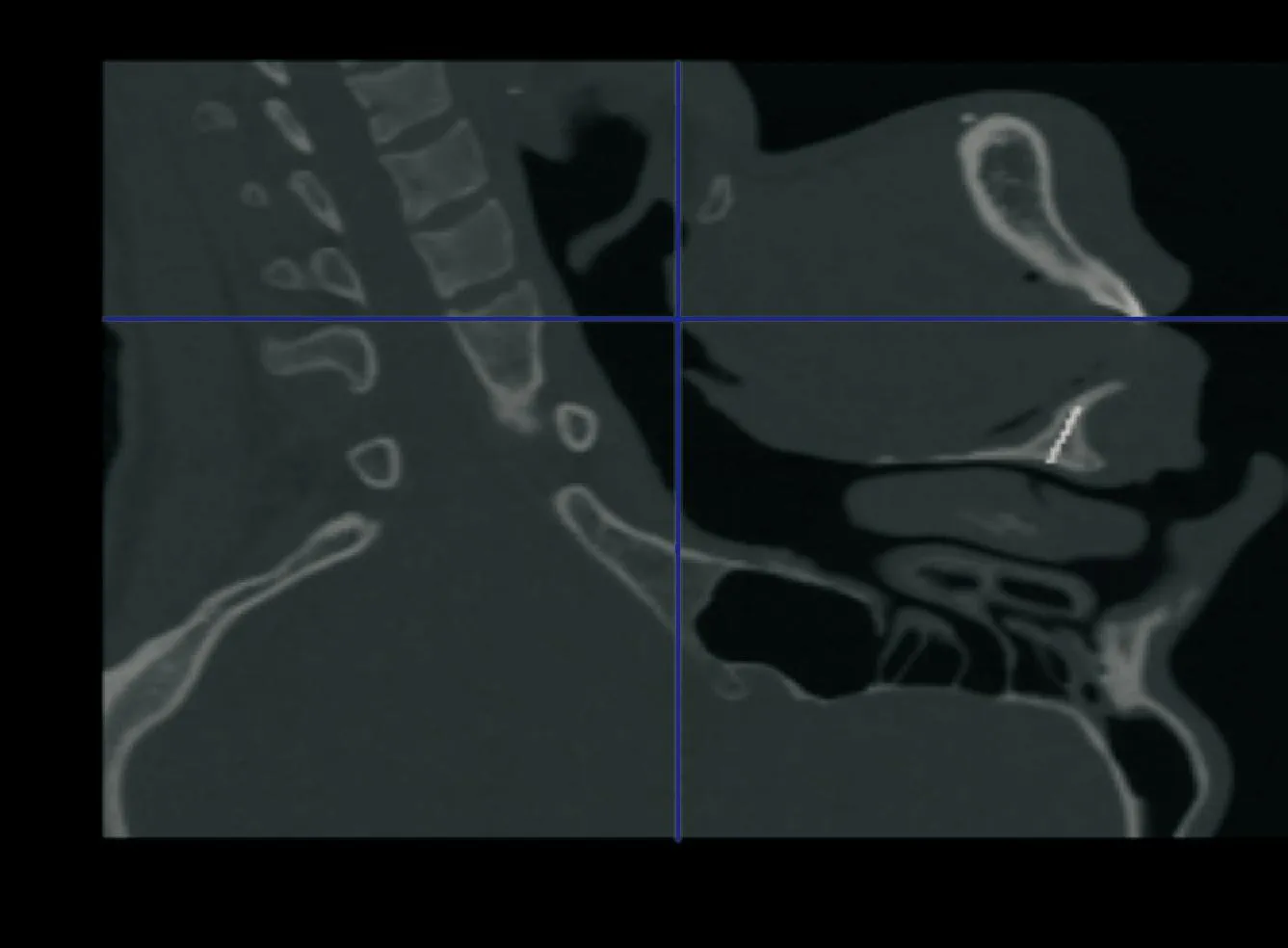
图7 种植体全功能定位
种植体智能定位和交互式全功能定位的颅骨上的起始点三维坐标值及相关参数比较见表1.
将表1的参数进行比较,在智能定位下生成的种植体图2通过交互式操作后,以符合种植要求为前提,将起始点的坐标和种植体的方向角度通过交互式操作稍微改动,重新定位后的种植体如图7所示,更符合种植效果的各项指标.

表1 种植体参数比较
4结束语
本文指出了在牙种植虚拟手术中种植体智能定位所存在的不足.在基于VTK的平台环境下,研究了三维模型坐标转换,并采用针刺取点法,直接拾取三维空间点,完成了交互式定位操作.将该操作运用于虚拟牙种植系统中,与智能定位辅助作用,成功实现了种植体的全功能定位.本文所讨论的全功能定位方法实现人性化操作、准确性高,极大地方便了医生对手术规划的指导作用.
参考文献:
[1]ZHANG S X,HENG P A,LIU Z J. Chinese Visible HumanProject[J]. Clinical Anatomy,2006, 19(3):204-215.
[2] 王远勤,王臻,吕杰,等.三维重建技术在口腔虚拟种植导航定位中应用的方法学研究[J]. 中国口腔种植学杂志,2005,10(3):114-117.
WANG Y Q, WANG Z, LYU J,et al.Study on the dental implantation orientation system based on 3D reconstruction imaging technology[J]. Chinese Journal of Oral planting, 2005, 10(3):114-117.
[3] CHUNG R W, SIU A S, CHU F C, et al. Magnet-retained auricular prosthesis with an implant-supported composite bar: A clinical report[J]. J Prosthet Eent, 2003,89(5):446- 449.
[4] 吴婷,療文和,戴宁,等.口腔种植导板计算机辅助技术研究[J].生物医学工程学杂志,2011,28(1):1-6.
WU T, LIAO W H, DAI N,et al. Research on computeraided technology of surgical guide for dental implant[J]. Journal of Biomedical Engineering, 2011,28(1):1-6.
[5] 黄俊华,唐平,陈松龄,等.量子遗传算法在口腔种植定位中的研究与应用[J].计算机工程,2013,39(1):208-212.
HUANG J H,TANG P,CHENG S L,et al. Research and application of quantum genetic algorithm in oral implant positioning[J].Computer Engineering, 2013,39(1): 208-212.
[6] 饶家声,彭承琳,张绍祥,等.基于VTK的医学图像交互式定位技术研究[J].科技通报,2010,26(3): 427- 429.
RAO J S, PENG C L, ZHANG S X,et al.Study of medical images interactive orientation based on VTK[J]. Technology Bulletin, 2010,26(3): 427- 429.
[7] 张光富,陈松龄,唐平,等.牙齿三维虚拟切片交互式定位与二次提取[J].广东工业大学学报,2012,29(3):54-58.
ZHANG G F,CHEN S L, TANG P,et al.Interctive location and the second extraction of tooth virtual slices on 3D[J].Journal of Guangdong University of Technology,2012,29(3):54-58.
[8] 邓杰航,吕灼荣,肖灿辉.胸部CT DICOM图像自动分割的研究与实现[J].广东工业大学学报,2013,30(2):37- 41.
DENG J H,LYU Z R,XIAO C H.Research on the automatic segmentation of the thoracic CT DICOM Images[J].Journal of Guangdong University of Technology.2013,30(2):37- 41.
[9] 洪涛,潘志方,林立本,等.VTK医学图像三维重建应用及实现[J].计算机系统应用,2011,20(4):127-130.
HONG T,PAN Z F,LIN L B,et al.Application and realization of 3D reconstruction of medical images of VTK[J].Computer Systems & Applications,2011,20(4):127-130.
[10]姚继权, 李晓豁.计算机图形学人机交互中三 维拾取方法的研究[J].工程设计学报,2006,13(2):116-120.
YAO J Q, LI X H.Research on 3-dimension pick-up of human-computer interaction in computer graphics[J].Journal of Engineering Design,2006,13(2):116-120.
[11] 袁杲,叶峰,杨玲,等.基于VTK的医学图像交互式三维测量技术研究[J].计算机工程与设计,2008,29(13):3549-3551.
YUAN G,YE F,YANG L,et al.Study of medical image interactive 3D measurement based onVTK[J].Computer Engineering and Design,2008,29(13):3549-3551.
[12] 梁英宗.数字肝脏三维重建技术的研究[D].重庆:重庆大学计算机学院, 2013:38- 40.
[13] 李奇峰,郭同德.三维场景地面坐标拾取的射线投影算法[J].测绘科学技术学报,2014,31(1):93-96.
LI Q F,GUO T D.The Algorithm of ground coordinates picking in 3D scene based on projection of ray[J].Journal of Geomatics Science and Technology,2014,31(1):93-96.
[14] 刘力强,周明全,耿国华.一种平行透视下的三维拾取方法[J].西北大学学报, 2002, 32(1):41- 42.
LIU L Q,ZHOU M Q,GENG G H.A parallel perspective under the three-dimensional pick up[J].Journal of Northwest University,2002,32(1):41- 42.
[15] SCHROEDER W J,MARTIN K,LORENSEN B. The visualization toolkit:an object object-oriented approach to 3D Graphics. 3rd edition[M]. New York:Kitware,Inc,Publisher,2003.
Reseach of Full-Featured Positioning of Craniofacial Virtual Dental Implant
Li Fang1, Tang Ping1, Jiang Xiao-ping2, Wang Gui-hai1
(1. School of Automation, 2. The Hospital of GDUT, Guangdong University of Technology, Guangzhou 510006, China)
Abstract:Based on 3D CT image reconstruction system for analysis and other aspects of the jaw morphology, stability and aesthetic dental implanting depend on 3D position of the implanting in the jaw. Since that, this paper proposes a full-featured interactive positioning method and discusses three-dimensional model of the coordinate transformation and coordinate data extraction technology. Combined the function of extraction database in VTK with the characteristics of needle puncturing for points, it obtains three-dimensional image coordinates of mandible by interactive operations to achieve the implant positioning of three-dimensional jaw image. The researchers compare this with the coordinates of the intelligent positioning of the implant. And through minor adjustment, the latter reduces the errors such as in the direction of the implant and implanting length, which effectively improves the accuracy and security of the virtual dental implant navigation system.
Key words:full-featured positioning; needle puncturing for points; interactive operation; 3D coordinates
中图分类号:TP391.9
文献标志码:A
文章编号:1007-7162(2016)01- 0040- 05
doi:10.3969/j.issn.1007- 7162.2016.01.008
作者简介:李芳(1988-),女,硕士研究生,主要研究方向为智能进化算法、医学图像可视化.
基金项目:广东省科技计划项目(2013b010404019);广州市花都区科技计划资助项目(HD13CXY-009)
收稿日期:2014- 11- 07
