
激光自动寻迹智能车设计与改进
2016-04-07 06:11刘诗恒广东海洋大学湛江524000易阳威深圳市长城开发科技股份公司深圳518000赵圣麟珠海市泰德企业有限公司珠海519000
电子制作 2016年2期
刘诗恒 王 慧 广东海洋大学 湛江 524000易阳威 深圳市长城开发科技股份公司 深圳 518000赵圣麟 珠海市泰德企业有限公司 珠海 519000
激光自动寻迹智能车设计与改进
刘诗恒 王 慧 广东海洋大学 湛江 524000
易阳威 深圳市长城开发科技股份公司 深圳 518000
赵圣麟 珠海市泰德企业有限公司 珠海 519000
广东省高等教育学会实验室研究基金项目(GDJ2012063)
广东海洋大学强校工程项目(GDOU2014050240)
【文章摘要】
以一种模型汽车为硬件平台,以单片机为核心控制单元,激光传感器为检测手段,设计制作一种自动寻迹智能车控制系统。系统采用双排激光传感器探测路径,快速准确地提取赛道信息,并结合闭环PID算法,控制舵机的转向和电机的转速,使小车能够沿着固定的跑道高速稳定行驶。重点介绍了系统的硬件电路设计及传感器的布局和控制策略。通过多次测试和试验,相比于传统的单舵机控制方案,灵敏的双舵机控制系统能很好地满足智能车对路径自动识别功能和抗干扰能力的要求,速度调节响应时间快,稳态误差小,具有较好的动态性能和良好的鲁棒性。
【关键词】
激光传感器;寻迹;智能车;PID控制算法
0 引言
飞思卡尔智能车竞赛是高等学校自动化专业教学指导分委员负责主办的全国大学生智能车竞赛,该竞赛以智能汽车为研究对象,是面向全国大学生的一种具有探索性工程实践活动,以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科。根据“飞思卡尔”智能车大赛规则要求:使用组委会指定车模,核心控制部件采用飞思卡尔MC9S12X128单片机,自主设计系统控制电路。系统控制电路包括:传感器信号的采集、处理电路、驱动电机及转向舵机控制电路以及各类接口电路。智能车设计、调试完成后,在规定的的比赛赛道上完成自动寻迹行驶,以速度最快用时最少者为优胜。
本文主要针对目前的一些传统方案进行改进设计及控制算法优化的实现。
1 硬件系统的构成
1.1电源管理
智能车竞赛所使用的供电设备为镍镉电池组,实测充满电空载状态下电压约在8.2-8.6V左右,不过电池的实际输出电压会随其所剩电量及后级负载的功耗变化而波动,最低可达到6V左右。单片机及各类逻辑芯片均需提供较为精准且稳定的5V电压以保证其正常工作。所以电源管理方案至关重要,是整个硬件系统可靠运行的基础。传统电源管理方案中常选用串联型线性稳压电源LM7805,然而从其数据手册中可以看到其要求电源输入电压为7V以上,故而当智能车电池仍有充足电量时,LM7805显然已经无法正常工作。虽然应用广泛的开关型稳压电源具有转换效率高,输入输出压差低等等的优点,但其电路结构较为复杂、输出电压纹波较大且对外围元件的参数匹配及可靠性要求较高。由此低压差中等功率的线性稳压电源在此应用场合中极为受到注重,经过长时间的对比及测试我们最终选用TI公司的低压差线性稳压器TPS7350。在电池电量完全耗尽以前,均能可靠的保证其输出电压的稳定性。其电源稳压电路参见图1。

图1 TPS7350电源稳压器电路
1.2电机驱动模块
合理设计的分立元件H桥电机驱动电路具有出色的低导通电阻及大的输出功率优势,但其电路设计及逻辑控制较为复杂,且较多的分立元件难以保证驱动系统的一致性及整体可靠性。
BTS7970为半桥式电机驱动IC,其性能优良,允许最大负载电流高达68A,大封装的设计便于散热。其内部MOS管完全导通电阻也仅有16mΩ,驱动效率高、发热较小。通过两片相同的IC组合成H桥式驱动电路(见图2),使得驱动电路极为简易。并且其内部具有安全保护功能,可靠且稳定。相比传统的分立式设计,驱动能力虽稍弱,但却具有总体积小,调试简单,稳定可靠,外围电路简单,成本低等优点,故选为最终的使用方案。
1.3巡线传感器模块
激光传感型电路已经成为当前的主流模式,优点是接收距离远和抗干扰能力强。传统方案里,激光发射器较多使用的是恒压供电,并且为5mW的小功率激光发射器,因激光接收传感器的响应敏感度直接受主动光源的功率而影响,故小功率激光发射器所提供的可靠检测距离并不远,且恒压形式的驱动方式致使激光发射器的寿命较短。
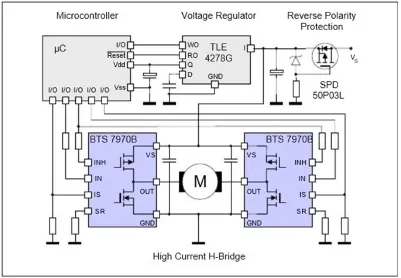
图2 BTS7970电机驱动电路
目前普遍应用的激光发射器大多数为激光二极管,因其为电流敏感器件,故电流稳定程度将直接影响到其使用寿命。因此这里我们采用可控精密稳压电源TL431来为激光二极管搭建恒流源驱动电路,参见图3,另外我们选用了50mw的相对功率较大的激光二极管,并提高供电电流,增加有效发射功率。在实际测试中,激光二极管峰值工作电流可达20mA左右,巡线检测距离可高达1m以上,近距离盲区也可控制在十几厘米以内,并且激光的光强基本一致。
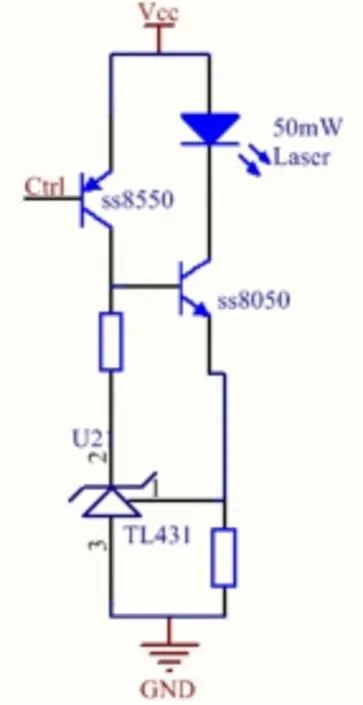
图3 TL431恒流源驱动电路
1.4人机交互界面
为了在不同场合下方便浏览及调整小车内部参数,需要配备简易快捷的人机交互部分,输入环节我们设计了使用8个独立贴片按键和8位的拨码开关以方便调整。

图4 人机交互效果图
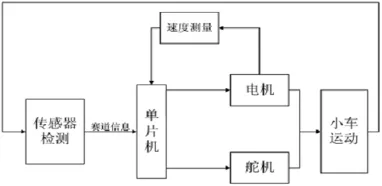
图5 控制系统框图
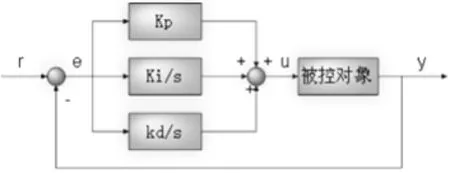
图6 PID 控制框图
传统显示环节多采用LCD显示屏,其显示单元重量及体积通常均比较大。故从缩小占用面积及简易性方面考虑我们使用了体积小的0.96寸OLED屏,其占用的面积相对非常小,仅有7.8cm²,分辨率也可达128*64,并且OLED为主动发光,故其对比度相当高,可视角度可达160°。效果图参见图4。
3 车模控制系统图
智能车要能在规定赛道上高速稳定的行驶,除了可靠的硬件、机械保障,剩下的则更多依赖于独到的控制思想及程序执行效率,同样传感器数据的采集、处理,舵机、电机间的耦合性,同样也是至关重要的因素。控制系统方图参见图5和图6。
3.1转向舵机控制算法
转向算法是智能车控制的核心,良好的转向算法应该能使赛车转向快速,准确而灵敏。本次设计使用PD 控制算法。PID 解决了自动控制理论所要解决的最基本问题(系统的稳定性、快速性和准确性)。调节PID的参数,可实现在系统稳定的前提下,兼顾系统的带负载能力和抗干扰能力,同时,在 PID 调节器中引入积分项,系统增加了一个零积点,使之成为一阶或一阶以上的系统,让系统阶跃响应的稳态误差为零。在 PID 控制中,比例项用于纠正偏差,积分项用于消除系统的稳态误差,微分项用于减小系统的超调量,增加系统稳定性。PID 控制器的性能就决定于Kp、Ki 和 Kd 这 3 个系数,PID 控制的核心在于调整这3个系数。PID 调节器中有比例微分(PD)、比例积分(PI)和比例积分微分(PID)三种类型。由 PD 调节器构成的超前校正,可提高系统的稳定性,并获得理想的快速,但稳态精度可能受到影响;由 PI 调节器构成的滞后校正,可以保证稳态精度,却是以对快速性的限制来换取系统稳定的;用 PID调节器实现的滞后-超前校正则兼有二者的优点,可以全面提高系统的控制性能,但参数调整复杂。一般调速系统要求是以动态稳定性和稳态精度为主,对快速性的要求可以低一些,所以主要采用 PI 调节器;在随动系统中,快速性是主要的要求,须用 PD 或 PID 调节器。
3.2电机速度控制算法
在智能车的控制策略中,控制目标是在满足一定巡线精度的前提下,尽可能提高车速。
进入直道后,直接控制 PWM 占空比,使加到驱动电机两端的平均电压为最大值,使电机迅速加速;速度超过直线段预设的速度限定值后,PWM 占空比调为 0,电机无阻尼自转;速度一旦小于给定值,则立即将PWM 占空比调到最大。判断进入弯道时,立即调整 PWM 输出,使加到电动机两端的电压为负的最大值,电机迅速制动;随后,根据弯道曲率情况,改变速度给定值,同样采用上述方式,使赛车在弯道内的速度始终接近给定值。
4 结语
通过多次测试和试验,改进后的传感器检测距离精确度提高且稳定,小车的工作时间得到延长,配合PID控制算法,能很好地满足智能车对路径识别性能和抗干扰能力的要求,速度调节响应时间快,稳态误差小,具有较好的动态性能和良好的鲁棒性。
【参考文献】
[1]卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航天航空出版社.2007.
[2]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社2008.
[3]丹尼斯•克拉克(Clark Dennis),迈克尔•欧文斯(Owings Michael),宗光华(译者),张慧慧(译者).机器人设计与控制[M].北京:科学出版社.2004.
[4]来清民.传感器与单片机接口及实例[M].北京:北京航空航天大学出版社.2008.
刘诗恒(1991-),籍贯:新疆,本科生,主要研究方向:嵌入式硬件;
通讯作者:王慧(1963-),籍贯:湖南,副教授,主要从事物理学的教学与传感器的研究。
【作者简介】
猜你喜欢
遗传(2022年9期)2022-10-10
大电机技术(2022年3期)2022-08-06
选煤技术(2022年2期)2022-06-06
煤气与热力(2021年4期)2021-06-09
湖北工业大学学报(2021年2期)2021-04-28
中华戏曲(2020年1期)2020-02-12
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2017年1期)2017-11-24
汽车文摘(2016年11期)2016-12-08
汽车与新动力(2015年1期)2015-02-27
