基于改进PID的三自由度直升机系统仿真研究
2016-04-06 08:28王玲玲
系统仿真技术 2016年4期
王玲玲, 梁 勇
(海军航空工程学院,山东 烟台 264000)
基于改进PID的三自由度直升机系统仿真研究
王玲玲, 梁 勇
(海军航空工程学院,山东 烟台 264000)
针对三自由度直升机非线性、多变量、强耦合等特性,利用改进的PID控制算法实现直升机俯仰角稳定回路控制及横侧角稳定回路控制。首先分析三自由度直升机的三个通道,并建立其动力学模型。对其中的俯仰通道、横侧角通道分别采用PD控制,并将横侧角通道和旋转通道联立设计,为旋转通道设计PID控制器。其次为提高俯仰角、横侧角的跟踪性能,对俯仰角通道和横侧角通道提出一种基于前馈补偿的复合PD控制。通过仿真将改进后的PD控制与改进前做比较,结果表明,复合PD控制可以提高俯仰角的跟踪速度,抑制横侧角的波动,从而使直升机高度、偏航、旋转三个通道运行更加平稳。
三自由度直升机; PID控制器; 复合控制
1 引 言
直升机由于其低空飞行、垂直起降等灵活的飞行方式,在军用和民用中已经得到越来越广泛的应用[1-2]。而由于其本身具有多变量、非线性、通道耦合的特点,也是控制领域中典型的较为复杂的被控对象[3-4]。因此对其在姿态、高度方面的研究具有重要的实际和理论意义。
三自由度直升机如图1所示,是由基座、平衡杆、平衡块和螺旋桨等组成。平衡杆以基座为支点,进行俯仰和旋转动作。螺旋桨和平衡块分别安装在平衡杆的两端。两个螺旋桨分别由直流无刷电机驱动,其速度差可以使平衡杆以基座为轴做旋转动作。平衡杆的旋转轴、俯仰轴和螺旋桨的横侧轴分别安装了编码器用以测量各轴脉冲,并根据编码器的转换关系获得直升机的实时飞行姿态信号。
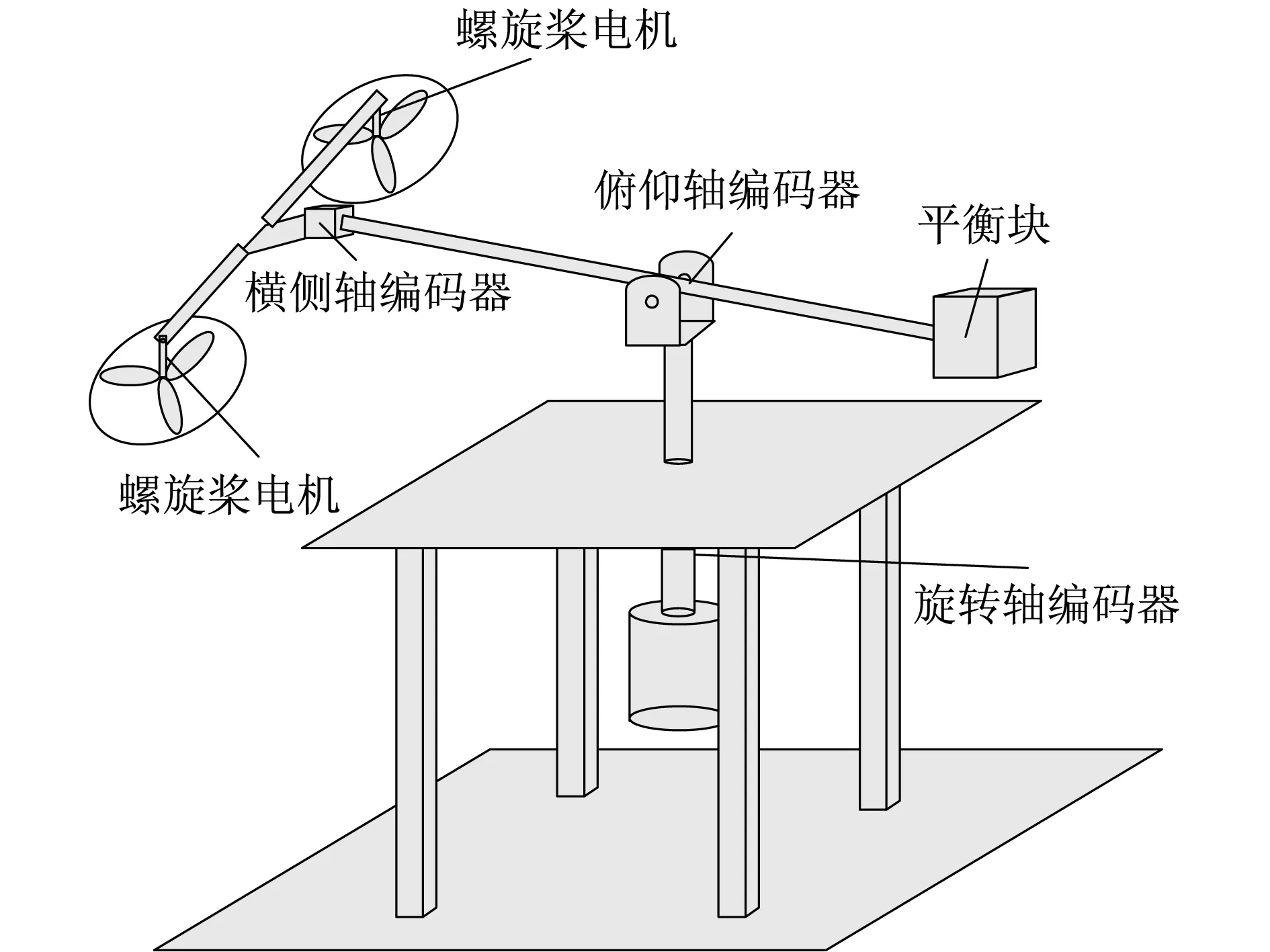
图1 三自由度直升机系统示意图Fig.1 Diagram of 3-DOF helicopter system
对该被控对象的研究多用PID控制算法,如文献[5];或是对PID算法的改进,如模糊PID[6-7]、神经网络PID[8]。本文先对系统做三个通道的建模仿真,并对俯仰通道、横侧角回路设计PD控制,而后以横侧角为内回路,对旋转通道设计PID控制器。最后,为了提高俯仰角的跟踪速度,抑制横侧角的超调,对俯仰通道及旋转通道的内回路设计按前馈补偿的复合控制。
2 系统建模
根据系统的特点可以将其分为三个轴(自由度)来分别建模。其中由图2列写俯仰轴的力矩平衡方程为
Kcl1(V1+V2)-l1mhg+l2mbg=
Kcl1Vs-Tg
(1)


图2 俯仰轴Fig 2 Diagram of pitch axis
如果忽略重力扰动力矩Tg,则由式(1)可以得到下面的线性系统:
(2)
对于横侧轴,由图3列写力矩平衡方程有
(3)

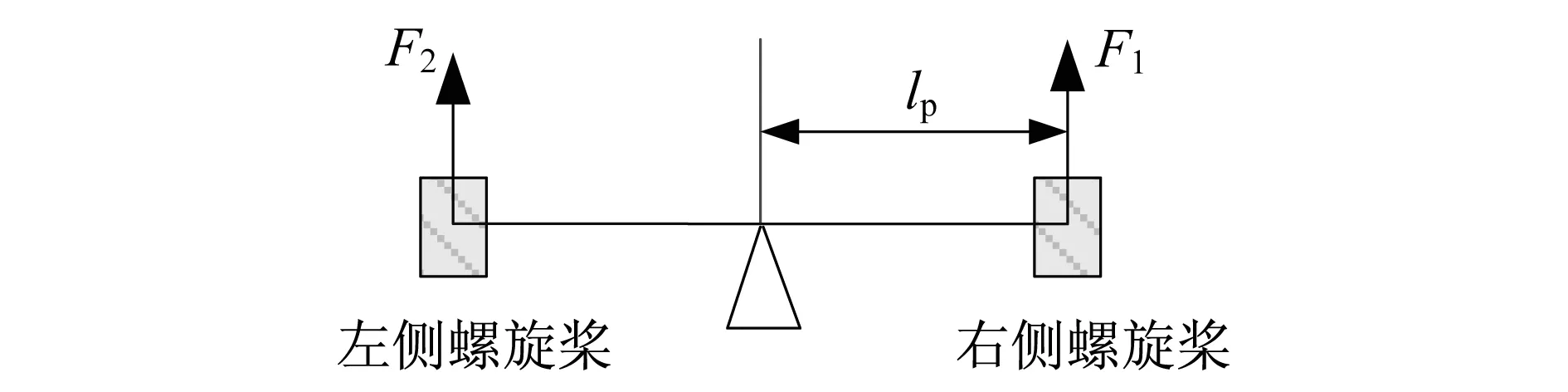
图3 横侧轴Fig 3 Diagram of yaw axis

当横侧角p在一个很小的角度内变化时,可以将其线性化,即有:
(4)
3 控制系统设计
3.1 俯仰控制器设计
由式(2)易知,俯仰轴系统为II型系统,系统不稳定,可以设计PD控制。假设Kep为俯仰角回
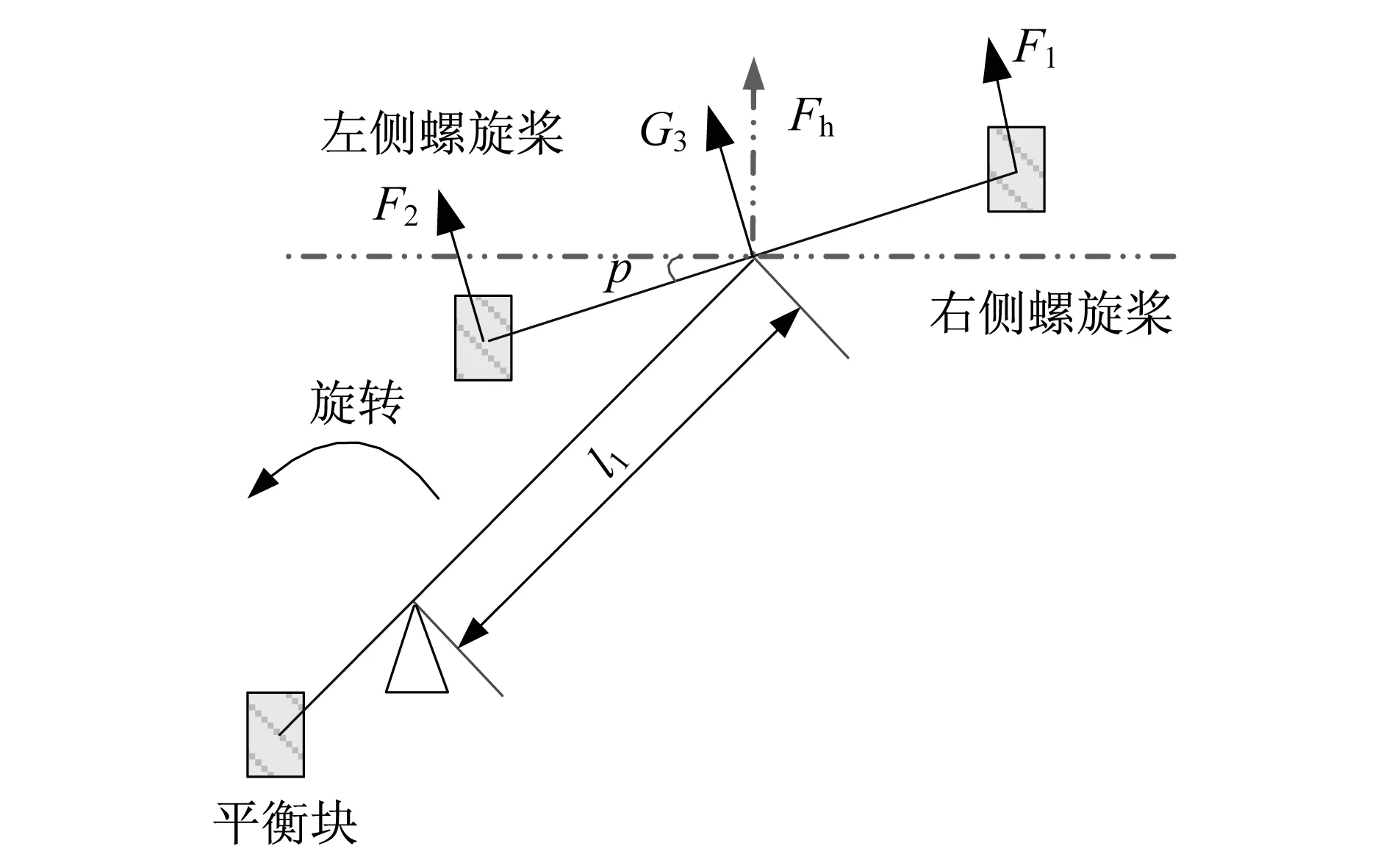
图4 旋转轴Fig 4 Rotation Axis
路的比例系数,Ked为俯仰角内回路的微分系数。经过PD参数调试,当Kep=0.3、Ked=0.5,其俯仰角跟踪曲线如图5所示。可以看到,俯仰角在0s~30s阶跃上升至20°,30s~40s是恒速上升阶段,40s~50s是角度恒定阶段,50s~60s是恒速下降阶段。在整个过程中,稳态精度较高,无峰值时间及超调量,但响应速度不够。
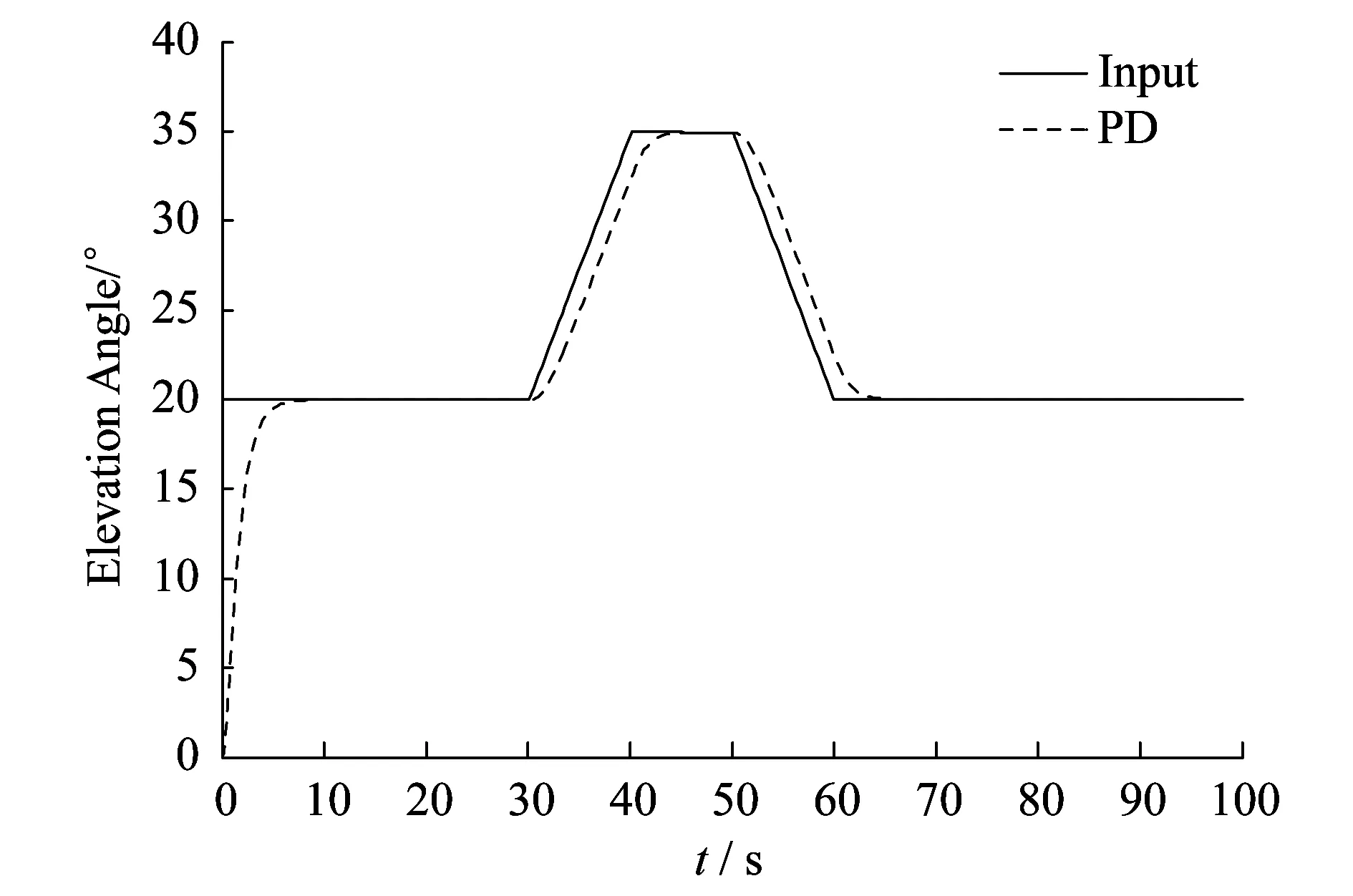
图5 PD控制下俯仰轴的角度跟踪曲线Fig 5 Angle tracking curve of the pitch axis under PD control
3.2 横侧轴旋转轴控制器设计
由式(3)知,横侧轴的横侧角p由螺旋桨的电压差提供,且由式(4)知改变直升机横侧轴的倾斜角大小可以控制直升机的旋转速度。如此根据横侧轴及旋转轴之间的相关性,可以将其合为一个系统进行设计,如图6所示。

图6 横侧轴旋转轴反馈PID校正框图Fig 6 PID compensation for yaw and rotation axis
对于横侧轴部分,同理设计速度内稳定回路以实现PD控制,其中Kpp为横侧角回路的比例系数,Kpd为横侧角内回路的微分系数。对于旋转轴部分,在反馈后前向通道的前端增加PI控制,从而实现旋转轴PID控制,其中Krp为旋转角回路的比例系数,Krd为微分系数,Kri为积分系数。
假设旋转角输入与俯仰角输入一致,当Kpp=0.3,Kpd=0.2,Krp=2,Krd=0.5,Kri=0.02时可以得到如下仿真曲线。由图7和图8可知,旋转角在阶跃阶段动态性能较差,斜坡阶段有延迟,整个过程有0.2°的稳态误差。同时,横侧角的波动较大,这会造成在实际控制中直升机的启停非常快,使得螺旋桨本体会产生晃动,从而使直升机丧失高度。因此必须要对横侧角的角度进行进一步的稳定控制。
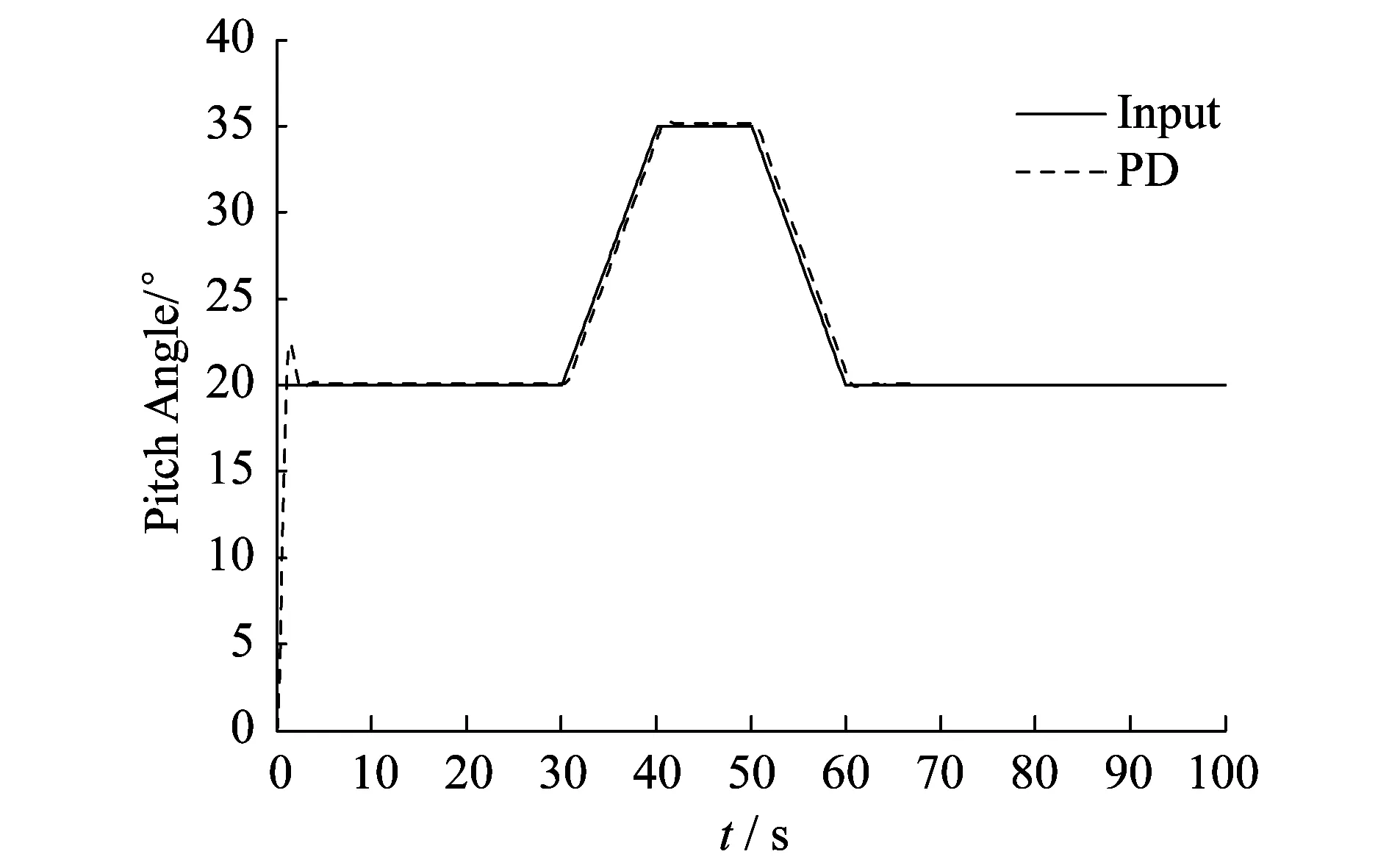
图7 PID控制下旋转轴的角度跟踪曲线Fig 7 Tracking curve of angle for rotation axis using PID control
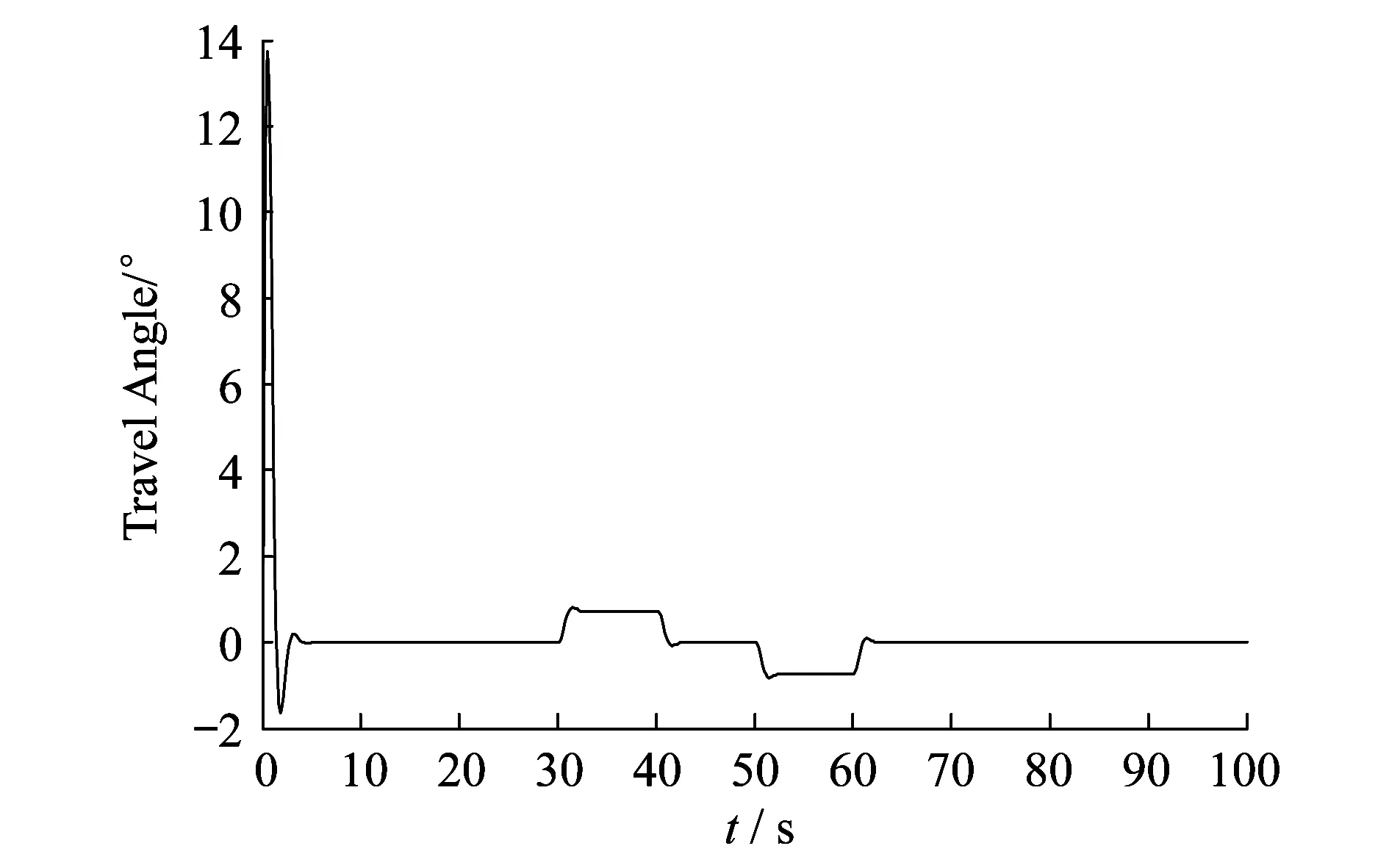
图8 PID控制下横侧轴的角度跟踪曲线Fig 8 Tracking curve of angle for yaw axis using PID control
4 复合控制的改进

即内回路的前馈实际为比例和微分环节,令
其中,Kfed为前馈部分的微分系数,Kfep为前馈部分的比例系数。对该算法进行仿真如图10所示,在Kep和Ked相同的情况下,当Kfed=1.2、Kfep=3.5时,增加比例微分的局部复合控制可以明显提高系统的动态性能。

图9 俯仰轴局部复合校正框图Fig 9 Block diagram of compound compensation in part for pitch axis


图10 局部复合PD控制下俯仰轴的角度跟踪曲线Fig 10 Angle tracking curve of the pitch axis under compound PD control in part
其中,Kped为前馈部分的微分系数,Kpep为前馈部分的比例系数。对该算法进行仿真如下,在图6中5个参数Kpp、Kpd、Krp、Krd、Kri不变的情况下,当Kped=1.2、Kpep=0.2时,对比图8与图12,横侧角的超调明显大幅降低。而横侧角波动的降低使得旋转角度控制的稳定程度更好,如图11所示。

图11 横侧角内回路复合控制下旋转轴的角度跟踪曲线Fig 11 Angle tracking curve of the rotation axis under compound control for inner loop of yaw axis
5 结 论
本文分析了三自由度直升机三个通道的建模问题,并针对俯仰角回路设计了PD控制,以横侧角为内回路,对横侧角设计了PD控制,对旋转角设计了PID控制器。仿真表明俯仰角跟踪不足,横侧角波动较大。而后对俯仰角回路和横侧角内回路设计复合控制。最后由仿真分析得出,改进后的PID控制可以提高俯仰角的跟踪速度,大幅降低横侧角的超调,从而提高旋转角回路的跟踪性能。
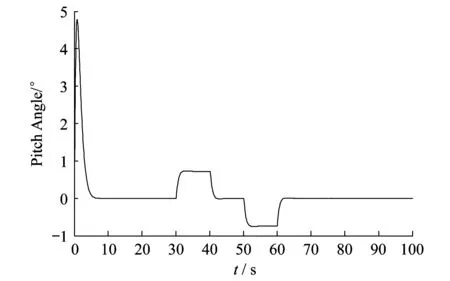
图12 横侧角内回路复合控制下横侧轴的角度跟踪曲线Fig 12 Angle tracking curve of the yaw angle under compound control for inner loop of yaw axis
[1] 杨慧萍,高贯斌,那靖.三自由度直升机实验平台及姿态跟踪控制器设计[J].机械与电子,2015(5):69-72.
YANG Huiping,GAO Guanbin,NA Jing.Design of 3-DOF Helicopter Experimental Platform and the Attitude Tracking Controller[J].Mechanical and Electronic,2015 (5) :69-72.
[2] 吴琼,王强,兰文宝等.基于模糊自适应PID三自由度直升机控制器的研究[J].黑龙江大学工程学报,2014,5(2):87-91.
WU Qiong,WANG Qiang,LAN Wenbao,et.Study of 3-DOf helicopter controller based on fuzzy adaptive PID[J].Journal of Heilongjiang Hydraulic Engineering College,2014,5(2):87-91.
[3] 于鉴,徐锦法.无人直升机发动机PID自适应控制系统[J].系统仿真学报,2008,20(23):6466-6469.
YU Jian,XU Jinfa.Engine PID Adaptive Control System for Unmanned Helicopter[J].Journal of system simulation,December,2008,20(23):6466-6469.
[4] 葛金来,张承慧,崔纳新.模糊自整定PID控制在三自由度直升机实验系统中的应用[J].信息与控制,2010,39(3):342-347.
GE Jinlai,ZHANG Chenghui,CUI Naxin.Fuzzy self-tuning PID control in the 3-DOF helicopter experimental system[J].Information and control,June,2010,39(3):342-347.
[5] 赵笑笑.基于PID控制器的三自由度直升机控制系统[J].山东电力高等专科学校学报,2009,12(4):52-55.
ZHAO Xiaoxiao.The 3-Dof Helicopter Control System Based on PID Controller[J].Journal of Shandong Electric Power College,2009,12(4):52-55.
[6] GAO Junshan,XU Xinghu,HE Chen.A Study on the Control Methods Based on 3-DOF Helicopter Model[J].Journal of Computers,2012,7(10):2526-2533.
[7] 贾森,王新华,龚华军,等.基于模糊PID 的直升机增稳控制系统设计与实现[J].电子测量技术,2015,38(11):70-73.
JA Sen,WANG Xinhua,GONG Huajun,et al.Design and implementation of stability augmentation control system for small unmanned helicopter based on fuzzy PID[J].Electronic measurement technology,November,2015,38(11):70-73.
[8] 马云飞.三自由度直升机模型的PID神经网络控制研究[J].沈阳大学学报,2010,22(4):15-17.
MA Yunfei.PID Neural Network Controller of 3-DOF Helicopter Model[J].Journal of Shenyang University,2010,22(4):15-17.
[9] 刘金琨.先进PID控制的MATLAB仿真[M].北京:电子工业出版社,2011. LIU Jinkun.Matlab Simulation of Advanced PID Control[M].Beijing:Publishing House of Electronics Industry,2011.

王玲玲 女(1984-),安徽铜陵人,讲师,主要研究领域为控制系统仿真与实现。

梁 勇 男(1976-),山东烟台人,博士,副教授,主要研究领域为控制系统设计与仿真。
Research of Simulation on 3-DOF Helicopter SystemBased on Improved PID
WANGLingling,LIANGYong
(Department of Control Engineering,Naval Aeronautical and Astronautical University,Yantai 264001,China)
For nonlinear,multi-variable,strong coupling characteristics of 3-DOF helicopter,an improved PID control algorithm was used to realize the control of pitch angle loop and yaw angle loop.Firstly,the dynamic model was established on the analysis for three channels of 3-DOF helicopter,and PD control was adopted for its pitch channel and yaw channel.Considering the relation between yaw channel and rotation channel,both two channels were designed as one system and PID control was used in rotation channel.In order to improve the tracking performance of pitch angle and yaw angle,a method with compound PD control based on feedforward compensation was proposed,which applied to pitch channel and yaw channel individually.The improved PD contvol was compared with that before improvement by simulation.The results show that the improved method could increase the tracking speed of elevation angle,suppress fluctuations in travel angle,which made height channel,yaw channel and rotating channel of helicopter run more smoothly.
3-DOF helicopter; PID controller; compound control
TP 15
A
猜你喜欢
经纬天地(2022年3期)2022-07-20
遥测遥控(2022年1期)2022-02-11
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学年刊A辑(中文版)(2021年4期)2021-02-12
制造技术与机床(2019年12期)2020-01-06
数学物理学报(2019年5期)2019-11-29
制造技术与机床(2019年9期)2019-09-10
中国惯性技术学报(2017年1期)2017-06-09
制造技术与机床(2017年2期)2017-05-04