
快速估算航速的方法及软件实现
2016-03-30 08:17杨博王德安冯国垠
船舶设计通讯 2016年2期
杨博王德安冯国垠
(上海船舶研究设计院,上海201203)
船舶总舾
快速估算航速的方法及软件实现
杨博王德安冯国垠
(上海船舶研究设计院,上海201203)
研究一种快速估算航速的方法,并基于该方法开发估算软件NEPTUNE,用于船舶方案设计阶段快速预报航速,提高设计效率。阻力估算采用基于母型船的二因次法,螺旋桨设计采用基于MAU图谱的最佳直径和限制直径螺旋桨设计。通过算例对该方法及软件进行验证,航速误差小于0.2 kn,能够满足方案设计阶段航速估算的要求,具有一定的实用价值。同时,统计了71型船的模型试验数据,回归了相关补贴计算公式,并量化了螺旋桨的转速余量。
航速预报;航速预报软件;阻力系数;粗糙度补贴;螺旋桨设计;航行特性;NEPTUNE
0 前言
船舶航速预报包括阻力估算和螺旋桨设计2个部分。常规的阻力估算方法主要有HOLTROP方法[1-2]、艾亚法以及各著名的系列试验方法如陶德系列法、SSPA系列法。随着时代的发展和优良船型的不断开发,上述方法越来越不能适应市场需要,基于母型船模型试验资料估算船舶阻力越来越多地得到应用[3]。近20年来,计算流体动力学(CFD)技术迅猛发展,该技术被用来进行船体性能预报、线型优化设计和对船体周围流动现象、机理的研究,取得了众多研究成果并积累了大量经验[4-5],成为船体线型研发的重要手段[6]。但是,CFD技术仍处在发展阶段,而且运算速度取决于计算机的配置,尚不能满足快速预报的需要。船舶螺旋桨设计方法主要分为理论法和图谱法[7]。动量矩理论、升力线法、升力面法[8]、边界元法等均属于理论法。图谱法因其简单、实用的优势,目前仍被广泛应用。常用的螺旋桨设计图谱有日本的AU(MAU)系列、瑞典的SSPA系列以及荷兰的B系列[9]。
本文介绍的快速预报航速的方法,其阻力估算采用基于母型船的二因次法,螺旋桨设计采用基于MAU图谱最佳直径和限制直径的两种设计方法,并开发了航速估算软件NEPTUNE,可大幅提高航速预报的工作效率。
1 基于母型船的二因次法阻力估算
根据全相似定律[10],船体总阻力RT相关计算见式(1)~(4):

式中:ρ——水密度,kg/m3;
S——船体湿表面积,m2;
v——航速,m/s;
CT——二因次法总阻力系数;
SBK——舭龙骨湿表面积,m2;
CA——船模实船换算补贴系数(或称相关补贴系数);
CR——剩余阻力系数;
CF——摩擦阻力系数;
CAA——空气阻力系数;
AV——水线以上迎风面积,m2
式(2)为国际拖曳水池大会(ITTC)1957年的计算公式。如何通过母型船估算CR和CA是本文的研究重点。
1.1 剩余阻力系数CR估算

母型船剩余阻力系数可通过其模型试验数据获得。如果母型船的模型试验采用二因次法换算,船模总阻力系数CTm计算见式(5)。

式中:CFm——船模摩擦阻力系数;
CRm——船模剩余阻力系数
根据傅汝德假定,母型船的剩余阻力系数与船
模剩余阻力系数相等,见式(6)。

如果母型船的模型试验采用三因次法换算,船模总阻力系数,见式(7)。

式中:k——形状因子;
CWm——船模兴波阻力系数
由式(5)、式(6)和式(7)可以得到母型船的剩余阻力系数,见式(8)。

需要注意的是,对于三因次法的母型船,船模摩擦阻力系数可按式(3)并结合水池试验时水的黏度系数计算求得。
经过基尔斯法修正后的剩余阻力系数,可以通过HOLTROP经验公式进行辅助校核计算,进一步提高剩余阻力系数的计算精度。
1.2 相关补贴系数CA估算
补贴系数对阻力估算影响很大,受船舶尺度和水池经验等多方面影响,估算存在一定的难度。习惯上称二因次法的补贴系数为相关补贴系数,称三因次法的补贴系数为粗糙度补贴系数。本文采用二因次方法,需要相对准确地估算出相关补贴系数。目前常用的估算方法有经验公式和由三因次补贴换算二因次补贴两种方法。
1.2.1 经验公式
荷兰MARIN水池早期的经验公式见式(9)。

式中:LWL——水线长,m
该公式仅与水线长度有关,未考虑船舶的肥胖程度,准确度较差。笔者统计了71型船的模型试验数据,其中:方形系数大于0.55小于0.70有26型;大于0.70小于0.80有25型;大于0.80小于0.86有20型。以对数形式回归了CA与LPP·CB关系,见式(10)。

式中:LPP——垂线间长,m;
CB——方形系数
1.2.2由三因次补贴换算二因次补贴
由式(2)和式(5)得到简化的二因次法总阻力系数见式(11)。

三因次法总阻力系数(ITTC1978计算公式)见式(12)。

式中:k——形状因子;
ΔCF——粗糙度补贴系数;CW——实船兴波阻力系数由式(12)和式(7)得到简化的三因次总阻力系数见式(13)。

由式(11)和式(13)得到三因次和二因次补贴系数的换算关系见式(14)。

式(14)中,粗糙度补贴有ITTC推荐公式见式(15)。

kS一般取150 μm,CF和CFm可以通过式(3)计算,但形状因子k只能根据经验估算[12-13]。
1.3 自航因子估算
自航因子,包括实船伴流分数、推力减额和相对旋转效率。可以通过经验公式进行估算,但其准确性具有一定的局限性,不同公式计算结果相差很大。本文作为方案设计阶段的快速估算方法,将母型船的自航因子直接应用于目标船,可以满足工程上计算精度的要求。
2 螺旋桨设计
2.1 螺旋桨的设计点
一般情况下,定距螺旋桨的设计点取主机持续服务功率和主机合同最大功率对应的主机转速,但该描述不够准确。螺旋桨需要偏轻设计,以避免大风浪海况和船舶污底导致主机超负荷,尤其是目前电喷主机的广泛应用,防止螺旋桨过载后主机扭矩超过限界线,导致主机停车影响航行安全。但螺旋桨转速余量[14]太大也不利于螺旋桨效率的充分发挥,本文研究了不同工况下的螺旋桨最小转速余量。
螺旋桨偏轻设计,即当螺旋桨在持续服务功率对应的主机转速运行时,螺旋桨的收到功率必须小于或等于主机持续服务功率扣除轴系效率,见式(16)~(17)。

式中:n——螺旋桨的转速,r/min;
NCSR——持续服务功率对应的主机转速,r/min;
PD——螺旋桨收到功率,kW;
CSR——主机持续服务功率,kW;
ηS——轴系效率
如表1所示,螺旋桨转速余量取三者中的最大值。以SM=15%,ηS=0.985为例,LRM=5.3%,与我们一般情况下LRM取约5%一致。另外,即使考核航速主机功率不包括SM,螺旋桨设计也要考虑转速余量,因为风浪和污底是真实存在的。

表1 不同工况下螺旋桨的最小转速余量
2.2 基于MAU图谱的最佳直径螺旋桨设计
最佳直径螺旋桨设计解决的是已知有效功率曲线、螺旋桨设计点的收到功率和转速,求最大航速及螺旋桨的最佳要素,包括盘面比、直径、敞水效率和螺距比。
已知各航速下的船舶阻力,按式(18)可以计算出有效功率曲线:

假定任一航速后,可计算出螺旋桨进速,见式(19)。

式中:vA——螺旋桨进速,kn;
v——航速,kn;
w——伴流分数
进而可计算出功率系数,见式(20)~(21)。

式中:n——螺旋桨设计点的转速,r/min;
PDO——螺旋桨敞水收到功率*;
PD——螺旋桨设计点的收到功率*;
ηR——螺旋桨相对旋转效率
在已经建立的二维表中进行插值,得到直径系数δ、敞水效率ηO和螺距比P/D。由直径系数δ可计算出螺旋桨直径,见式(22)。最终可计算出螺旋桨的有效推功率,见式(23)~(24)。

式中:D——螺旋桨直径,m;
n——螺旋桨设计点的转速,r/min;
PTE——螺旋桨的有效推功率**注:PDO、PD、PTE按MAU图谱定义的单位选取。;
ηH——船身效率;
t——推力减额分数
假定若干航速经过计算可以得到有效推功率曲线,则有效功率曲线与有效推功率曲线的交点即为最大航速,相应螺旋桨进速对应的直径、敞水效率和螺距比即为最佳螺旋桨要素。
另外,分别对3个盘面比的最佳螺旋桨设计进行空泡校核,以求得不发生空泡的最佳螺旋桨要素。
基于该方法设计的螺旋桨,敞水效率取自模型,未换算的实桨,结果偏保守。
2.3 空泡校核
采用BURRILL法进行空泡校核,空泡数计算见式(25)~(26)。

式中:σ0.7R——0.7R半径处空泡数;
p0——大气压力,kgf/m2;
pv——汽化压力,kgf/m2;
g——重力加速度,m/s2;
h——桨轴浸没深度,m;
v0.7R——0.7R半径处合速度
由空泡数,可从BURRILL图中读出单位投影面积的平均载荷系数τc,可计算投影面积AP,见式(27)。
式中:T——螺旋桨推力,kgf
由投影面积AP计算伸张面积AE,见式(28)。

需要的最小盘面比计算见式(29)。

式中:AO——盘面积,m2
2.4 航行特性
航行特性研究的是已知船的有效功率、螺旋桨的直径和敞水特征,求螺旋桨的收到功率和转速。如何将船和桨建立联系,引入无量纲的螺旋桨推力载荷系数TC见式(30)。

对于螺旋桨,螺旋桨推力见式(31)。

式中:KT——螺旋桨推力系数
螺旋桨进速计算见式(32)。

式中:J——螺旋桨进速系数
对于船,螺旋桨推力见式(33)。

螺旋桨进速表示为公式(19)。分别将式(31)~(33)、
式(19)代入推力载荷系数,见式(34)。
式(34)左侧表达式与螺旋桨的敞水特征有关,右侧与船的有效功率和螺旋桨直径有关,该公式将船和桨联系起来。
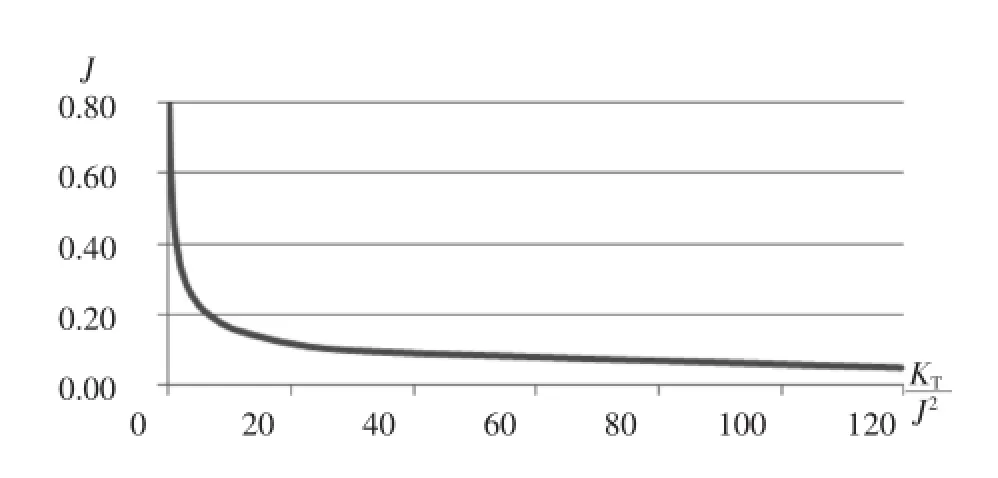
图1 关系曲线


式中:PE——船舶有效功率,kW;
ηD——推进效率
推进效率ηD由船身效率ηH、相对旋转效率ηR和敞水效率ηO组成,计算见式(36)~(37)。
2.5 基于MAU图谱的限制直径螺旋桨设计
若螺旋桨直径受到吃水等条件限制,其设计按照此方法,即已知有效功率曲线、螺旋桨设计点的收到功率和转速以及螺旋桨直径,求最大航速及螺旋桨的盘面比、敞水效率和螺距比。

最后,按此方法进行3个盘面比的限制直径螺旋桨设计,分别进行空泡校核,以求得不发生空泡的螺旋桨要素。
3 软件实现
基于上述快速估算航速的方法开发了软件,NEPTUNE,在WINDOWS环境下运行,采用ACCESS作为后台数据库,DELPHI作为软件开发工具。
3.1 软件功能模块
NEPTUNE软件包括主要参数定义、阻力计算、螺旋桨设计、航速预报和油耗计算5个功能模块,如图2所示。
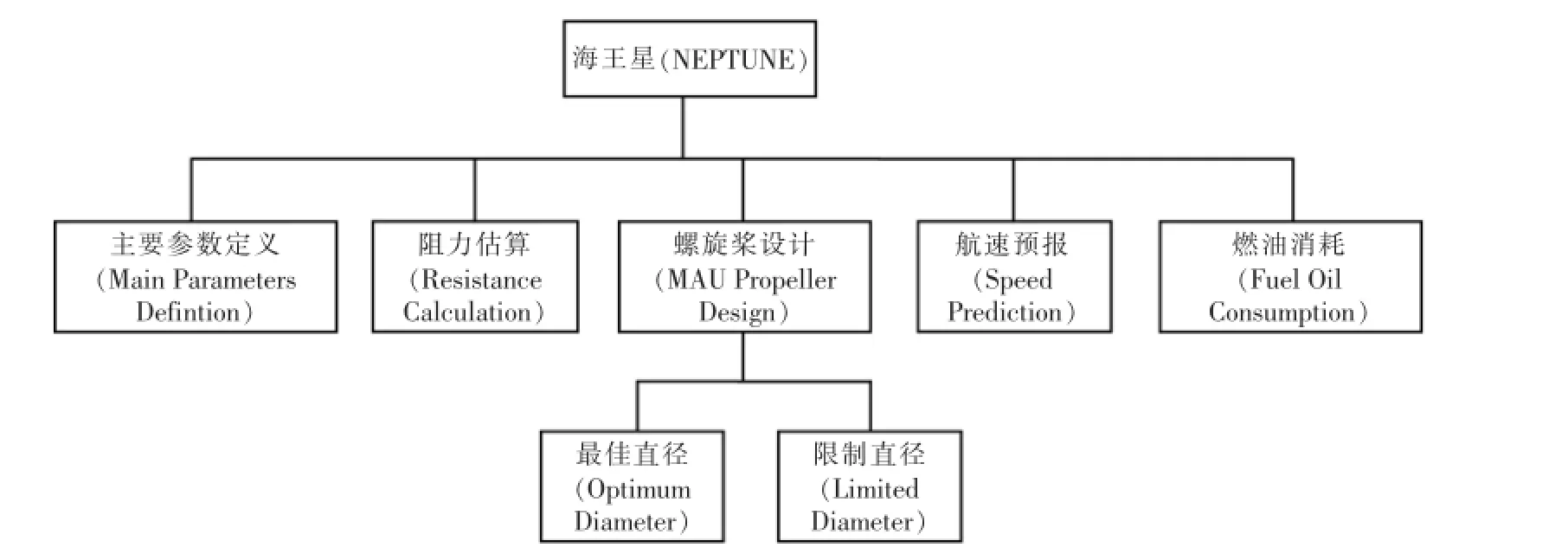
图2 软件功能模块
其中,主要参数定义模块的操作界面如图3所示。该模块用于定义目标船的主要尺度、主机功率及转速、水的类型等常数,其他模块计算用到的部分参数也将从该模块调取。油耗计算模块根据计算出的收到功率曲线,输入主机单位油耗,计算出各航速下的主机日油耗,操作界面见图4。阻力计算、螺旋桨设计和航速预报3个模块见3.1~3.3。

图3 主要参数定义操作界面

图4 油耗计算操作界面
3.2 阻力计算模块
阻力计算模块基于母型船的二因次阻力估算方法开发,操作界面见图5。模型试验数据库(MTDB)的主要尺度及剩余阻力系数等数据可以作为母型船数据自动导入该模块。具体操作是在Mode中选择Load from MTDB,并输入MTDB的编号,MTDB的操作界面见图6。如缺少目标船的湿表面积数据,可使用软件自动计算的估算值代替。图5中按钮1 000 Ca用于计算相关补贴,提供了荷兰水池的经验公式和笔者回归的对数公式2种方法,也可以根据个人经验手工输入。按钮Cr adj.factor用于计算剩余阻力系数的基尔斯修正系数,也可以根据个人经验手工调整。输入完整参数后,单击按钮Run即可计算出给定航速下的总阻力和有效功率,形成有效功率曲线供后续模块使用。
该版本的剩余阻力系数修正方法仅考虑了基尔斯法。在后续软件升级过程中,将增加一种其它方法与其比照,如泰洛剩余阻力系数图谱法或HOLTROP经验公式法,以进一步提高剩余阻力系数的估算精度。
3.3 螺旋桨设计模块
螺旋桨设计模块由最佳直径螺旋桨设计和限制直径螺旋桨设计2部分组成,分别基于前面介绍的计算方法,包括进行空泡校核。最佳直径螺桨设计的操作界面如图7所示。
输入参数可以选择自动模式,有效功率曲线由前面的模块自动导入,单击Run按钮,界面右侧分别计算出4叶、5叶和6叶的最佳直径螺旋桨,包括直径、螺距比、盘面比和最大航速等。限制直径螺旋桨设计与之类似,需要多输入1个螺旋桨直径参数。计算后,界面右侧4叶、5叶和6叶的螺旋桨直径相同,但螺距比、盘面比和最大航速不同。
3.4 航速预报模块
前面介绍的航行特性计算方法开发了航速预报模块,操作界面如图8所示。输入参数可以选择自动模式,有效功率曲线、螺旋桨参数等由前面的模块自动导入。对于螺旋桨参数可以选择OptimumDiameter和LimitedDiameter2个模块输入。单击Run按钮,界面右侧计算出各航速下的螺旋桨收到功率和螺旋桨转速,生成航速与功率和转速的曲线。

图5 阻力计算操作界面
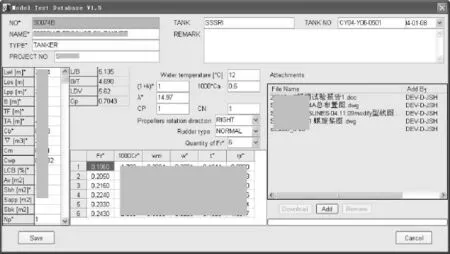
图6 MTDB操作界面
3.5 航速估算实例
以一型实际设计并建造的集装箱船为例,通过软件估算与模型试验数据进行对比,验证该软件的计算精度,计算结果见表2~4。该船船长180.0 m,船宽32.2 m,设计吃水9.5 m,排水体积42 905 m3,目标航速约13.8 kn。
该算例表明,NEPTUNE的螺旋桨设计与实船设计基本相当,航速误差小于0.2 kn,软件计算值偏保守。
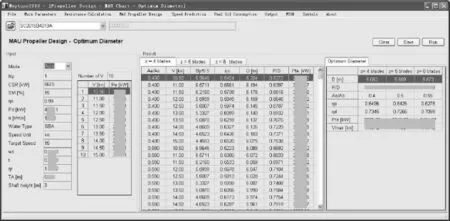
图7 最佳直径螺旋桨设计操作界面

图8 航速预报界面

表2 有效功率对比表
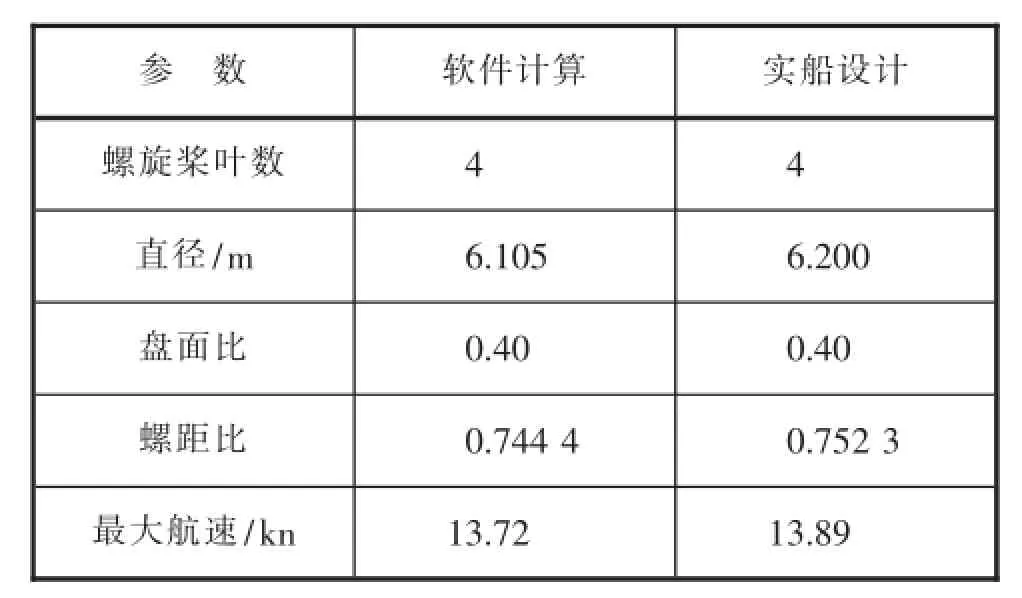
表3 螺旋桨设计对比表
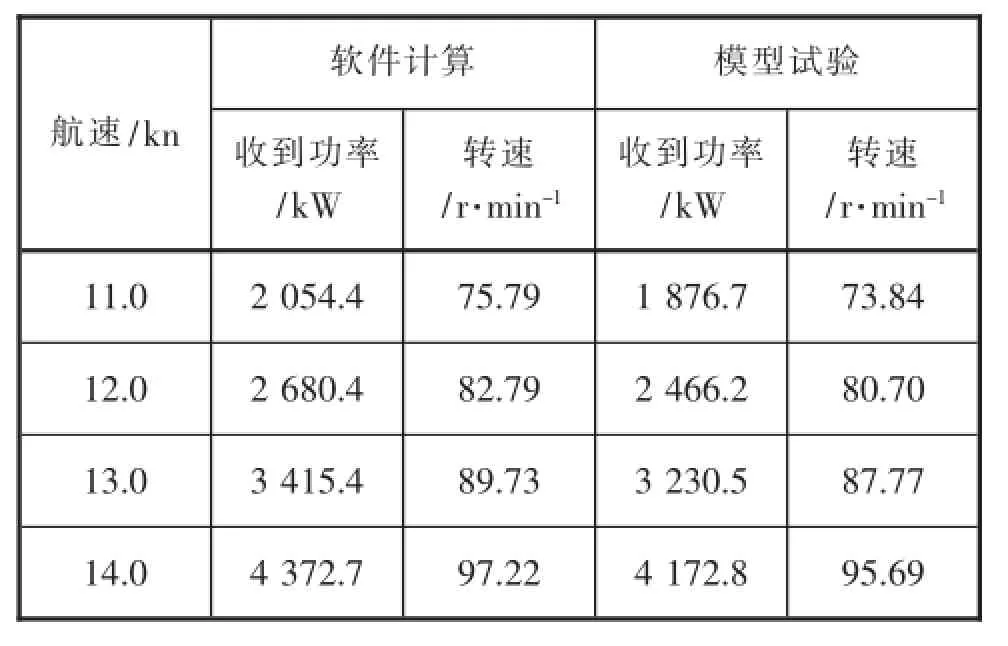
表4 收到功率对比表
4 结语

基于该方法开发了估算软件NEPTUNE,并通过某集装箱船算例进行验证,航速误差小于0.2 kn,可以满足在方案设计阶段快速估算船舶航速的要求。该方法和软件使用方便,效率高,具有一定的实用价值。
[1]Holtrop J,Mennen G G J.A statistical power prediction method[J].International Shipbuilding Progress,1978,25:253-256.
[2]Holtrop J,Mennen G G J.An approximate power prediction method[J].International Shipbuilding Progress,1982,29:166-170.
[3]揭正华.基于船模试验数据库的快速性预报研究[J].交通部上海船舶运输科学研究所学报,2004,27(2):73-79.
[4]陈康,周志勇,魏菲菲.基于CFD技术的散货船线型优化研究[J].上海造船,2011(1):50-54,79.
[5]陈康,黄德波,李云波.三体船阻力计算的改进方法研究[J].哈尔滨工程大学学报,2009,30(2):126-131.
[6]陈康,魏菲菲,程宣恺,等.基于参数化建模的优化设计方法[J].船舶与海洋工程,2013(4):6-8,33.
[8]徐欣伟,叶恒奎,管延敏.基于Visual Basic 6.0的螺旋桨设计及性能预报软件[J].中国舰船研究,2011,6(2):46-51.
[9]吴小平,刘洋浩,张磊.基于遗传算法的船舶螺旋桨优化设计[J].船舶与海洋工程,2014(4):31-37.
[10]盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2003.
[11]张峥,林钧.基尔斯法阻力预报程序[J].船舶,2003(1):52-55.
[12]杨佑宗,陈豪.实船航速预报技术研究[J].中国造船,2000,41(1):1-10.
[13]周占群,谢克振,胡平,等.大型油船航速估算方法[J].中国造船,1994(4):1-12.
[14]刘海强,吕林.船舶机桨匹配设计与分析计算平台研究[J].船舶工程,2008,37(3):56-58.
A Quick Method of Speed Prediction and Its Software Implementation
YANG BoWANG De-anFENG Guo-yin
(Shanghai Merchant Ship Design and Research Institute,Shanghai 201203,China)
A quick method of speed prediction was researched and NEPTUNE software was developed accordingly to predict ship speed quickly in the proposal stage,tremendously improving the design efficiency.2-D method based on parent ships was used for resistance calculation,while both optimum diameter and limited diameter propeller designs in accordance with MAU chart were taken for propeller design.The method and software were verified by an example in which the speed error was less than 0.2 kn,showing that the requirement of speed prediction in the proposal stage could be fulfilled and certain practical value was obtained.In addition,model tank test data statistics of 71 vessels led to the formula of correlation allowance by means of regression method and the light running margin of propeller was quantified as well.
speed prediction;speed prediction software;resistance coefficient;roughness allowance;propeller design;navigation performance;NEPTUNE
U661.1
A
1001-4624(2016)02-0001-09
2016-09-26;
2016-12-21
杨博(1981—),男,高级工程师,长期从事船舶总体设计和研发工作。
王德安(1985—),男,工程师,从事船舶总体设计和研发工作。
冯国垠(1979—),男,高级工程师,长期从事船舶舾装设计和研发工作。
猜你喜欢
河南科技(2023年1期)2023-02-11
舰船科学技术(2022年22期)2022-12-13
水上消防(2022年1期)2022-06-16
Chinese Physics B(2022年5期)2022-05-16
航空发动机(2020年3期)2020-07-24
黑龙江交通科技(2020年5期)2020-01-13
有机氟工业(2019年2期)2019-08-12
舰船科学技术(2018年7期)2018-07-25
兰台世界(2017年10期)2017-06-01
舰船科学技术(2016年1期)2016-02-27
