基于模糊自适应PID高精度控制系统设计*
2016-03-16 02:37刘新妹郭栋梁殷俊龄
电机与控制应用 2016年2期
陈 云, 刘新妹, 郭栋梁, 殷俊龄
(中北大学 电子测试技术国家重点实验室,山西 太原 030051)
基于模糊自适应PID高精度控制系统设计*
陈云,刘新妹,郭栋梁,殷俊龄
(中北大学 电子测试技术国家重点实验室,山西 太原030051)
摘要:针对传统二维运动控制平台定位精度低、稳定性差的问题,设计了基于模糊自适应PID算法的运动控制系统。设计了系统的硬件组成,建立了基于模式力的解耦动力学模型,并进一步分析模糊自适应PID控制算法的控制原理和设计规则,同时运用MATLAB对运动控制系统进行了传统PID控制和模糊自适应PID的模型仿真,得到系统的位置阶跃响应曲线。试验测试结果表明: 以直线运动和圆弧运动进行定位试验,系统在X、Y二维方向上动态位移的跟随误差δ∈[-0.8μm, 0.8μm]。因此,系统完全能满足高速运动下定位精度高和稳定性好的要求。
关键词:运动控制; 解耦运动学模型; 模糊自适应PID; 定位精度
0引言
现今数控技术已成为现代制造技术的基础和核心。近年来,基于DSP的运动控制卡支持复杂的运动算法,可以很好地解决传统二维控制平台定位精度低、灵敏度差的问题[1-2]。针对控制系统的控制算法问题,国内外学者做了大量研究和分析工作。吕东阳等在文章中指出传统的PID控制存在非线性控制系统控制效果不理想的问题。张昌凡、王秋平等先后提出了基于蚁群算法-BP神经网络的控制系统,该算法需要较高的数学公式推理能力;韩文伟、栾秀春等提出了基于T-S模糊控制的控制系统,但部分状态变量不能直接测量,需针对系统变量设计状态观测器;不少学者还提出滑模变结构控制算法(SMC),但是如何选取滑模面和切换线使系统达到稳定状态的条件不易掌握[3-6]。因此设计了基于模糊自适应PID算法的运动控制系统,具有很好的鲁棒性,同时环境干扰及参数变化对系统的影响被极大减弱,极大地提高了运动控制系统的精度,且抗干扰性强。
1控制系统硬件组成
运动控制系统的硬件主要由PC机、运动控制卡、驱动器和平面电机组成。系统以IPC为主机,主要负责信息流和数据流的管理。将基于DSP的运动控制卡插在PCI卡槽内,且与驱动器相连,主要负责发送控制指令和各参数指令,最终控制平面电机的运动。系统硬件框图如图1所示。
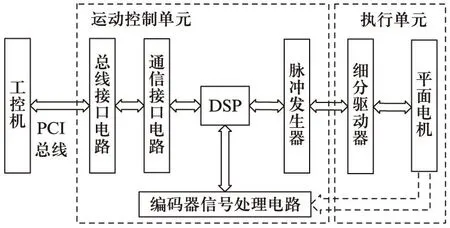
图1 系统硬件框图
运动控制单元是基于DSP的运动控制卡的一款PCI总线的高集成度、高可靠度的脉冲式控制卡,可同时控制多个电机。运动控制卡从PC机接收运动控制命令(包括速度命令、加减速命令和位置命令等),同时PC机也要从运动控制卡上获得运动信息。运动控制卡采用PCI总线通信方式,提高了通信接口的速度、开放性和可扩展性。通信接口单元完成控制系统和PC机之间的通信连接。
执行单元包括正弦波脉宽调制(SPWM)的驱动器。驱动器内部设计有PI调节器,可以使运动控制系统的动态响应变得更快。同时,采用产生平面定位运动的平面电机,电机由动子平台和定子组成。动子平台由4组Halbach永磁阵列组成,定子由4组三相绕组构成,具有热耗低、精度高、响应速度快、灵敏度高等特点[7-9]。
2基于模式力的解耦动力学模型
平面电机的动子平台由4组万向滚珠轴承支撑,可以实现X、Y和θz三个自由度运动。图2为平面电机动子的受力位置示意图。由模式力定义,可推导出执行器到模式力的转换方程为

(1)

图2 动子受力位置示意图
式中:FX——动子受x方向的单边模式力;
FY——动子受y方向的单边模式力;
TZ——动子受绕组z轴的转矩;
fix——i号直线电机x方向的单边执行器力;
fiy——i号直线电机y方向的单边执行器力。
忽略滚珠轴承的摩擦和涡流效应等引起的阻尼,可推出X、Y和θz三个自由度的解耦动力学方程为

(2)
式中:X——动子平台在x方向的位移;
Y——动子平台在y方向的位移;
θz——动子平台绕z轴转动的角度;
M——动子平台的质量;
Izz——动子平台沿z轴的转动惯量。

3模糊自适应PID控制算法
系统以误差e和误差变化率ec作为输入,而PID调节器包括比例环节、积分环节和微分环节,其系数分别为KP、KI和KD。将PID的三个参数与e和ec之间的关系进行模糊化成为模糊规则的条件,根据条件运用模糊规则进行模糊推理,得到模糊决策,将模糊决策去模糊化,动态输出KP、KI和KD,从而使被控对象有良好的动态和静态性能。模糊自适应PID控制器的结构图如图3所示。

图3 模糊自适应PID控制器结构图
该系统的模糊集合的输入语言变量为误差e和误差变化率ec。设定基本论域均为[-6,6],模糊集合的输出语言变量为KP、KI和KD,输出的基本论域依次为[-0.3,0.3]、[-0.06,0.06]和[-6,6]。在基本论域上定义7个模糊子集分别对应7个语言变量: PB(正大),PM(正中),PS(正小),O(零),NS(负小),NM(负中)和NB(负大)。通过适当的比例因子,可将输入模糊论域处理到对应的基本论域中。本系统采用了三角形作为隶属度函数,以误差e和积分环节KI隶属度曲线如图4所示。

图4 e和KI的隶属度曲线
系统共有两个输入的模糊控制器,采用的控制规则以IF...THEN的形式表示为: IFAiANDBj,THENCk,其中Ai是误差模糊集;Bj为误差变化率模糊集;Ck为控制量模糊集。对于误差e和误差变化率ec,根据KP、KI和KD对系统输出特性的影响,可以得到以下模糊规则:
(1) 当e较大时,为了提高系统的响应速度,以及防止ec过大引起的微分溢出,应取较大的KP和较小的KD,为了出现较小的超调,应取KI=0。
(2) 当e和ec中等大小时,为了提高系统的相应度且保证超调量较小,应选取较小的KP,而KI和KD取适当的量即可。
(3) 当e较小,为了系统的稳定性,应KP、KI取较大的数值。为了系统在设定值附近不出现振荡和具有良好的抗干扰性,可以得到KD的选择原则: 当ec较小时,KD要选大些,当ec较大时,KD要选小些[10-12]。
根据上述分析和语言变量的定义,总结出的KP、KI和KD规则如图5所示。

图5 模糊控制规则图
在MATLAB仿真系统中建立模糊控制器,然后与传统PID控制结合构成模糊自适应PID控制器。在Simulink环境下,对位置模糊PID的控制策略进行仿真,建立如图6所示的仿真模型,仿真结果如图7所示。
图7(a)~(b)分别为传统PID控制和模糊自适应PID控制的位置控制系统阶跃响应曲线。传统PID控制的阶跃响应调节时间为8ms,稳态值为1,超调量为20%。模糊自适应PID控制的阶跃响应调节时间为6ms,稳态值为1,无超调。仿真结果表明: 采用模糊自适应PID控制算法的调节时间减小,系统的响应速度加快,而且超调量也明显减小,几乎为零,控制系统的动态特性和静态特性均能得到改善,模糊自适应PID控制器能更好地满足运动控制系统的应用要求。
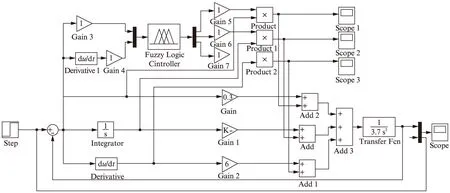
图6 系统仿真模型

图7 控制器系统阶跃响应曲线
4试验结果及分析
4.1 直线及圆弧运动测试
以直线和圆弧运动相结合的方式对系统进行精度测试。电机以100000μm/s的速度沿直线经过点A到达点B(50000,50000),并以B点为起点进行半圆弧运动测试,圆弧半径为5000μm,经过C点到达圆弧另一端D点,最后沿着直线运动到E点并返回原点,系统运动轨迹如图8所示。图8中,水平方向为X轴,垂直方向为Y轴,单位为μm。图9为系统现场测试图,上述5个特征点的测试结果如表1所示。
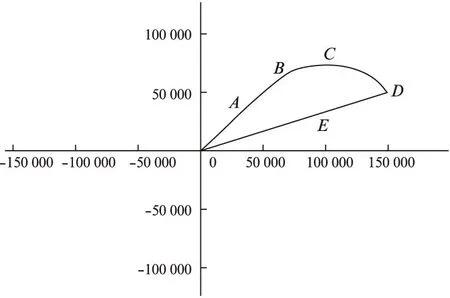
图8 系统运动轨迹
图9 系统现场测试图
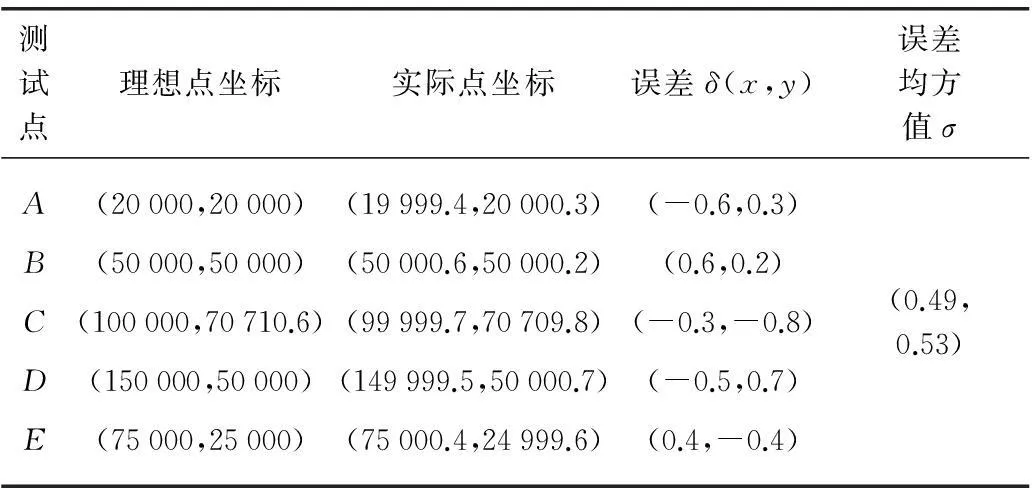
测试点理想点坐标实际点坐标误差δ(x,y)误差均方值σA(20000,20000)(19999.4,20000.3)(-0.6,0.3)B(50000,50000)(50000.6,50000.2)(0.6,0.2)C(100000,70710.6)(99999.7,70709.8)(-0.3,-0.8)D(150000,50000)(149999.5,50000.7)(-0.5,0.7)E(75000,25000)(75000.4,24999.6)(0.4,-0.4)(0.49,0.53)
4.2 测试结果及误差分析
由图8的系统运动轨迹和表1中5个特征点的运动测试结果可知,系统在X轴和Y轴二维方向上的位移跟随误差范围均在[-0.8μm,0.8μm]之内,绝对误差小于1μm,且误差均方值仅为(0.49,0.53)。进一步分析,误差产生原因是平面电机的定子与动子在加工过程中存在气隙问题,在运动过程中产生了不均匀的机械摩擦。综上,该系统具有高精度,高稳定性的特点。
5结语
设计了一种基于模糊自适应PID控制算法的高精度运动控制系统。介绍了系统的总体构成,对该运动控制算法原理分析并进行建模仿真,最后对系统进行圆弧和直线运动的位移测试,系统在X,Y轴的跟随误差均不超过0.8μm,满足高精度要求。拟在消除跟随误差方法上作进一步研究。
【参 考 文 献】
[1]荣盘祥,张亚慧,张欢欢,等.基于DSP的运动控制卡的研究与开发[J].电机与控制学报,2011,15(3): 35-39.
[2]袁巨龙,张飞虎,戴一帆,等.超精密加工领域科学技术发展研究[J].机械工程学报,2010,46(15): 161-177.
[3]吕东阳,王显军.基于模糊PID控制的电机转台伺服系统[J].计算机应用,2014,34(S1): 166-168.
[4]王秋平,马春林,肖玲玲,等.基于蚁群算法-BP神经网络的主蒸汽温度控制系统仿真研究[J].热力发电,2013(11): 64-68.
[5]韩文伟,栾秀春,杨爱民,等.基于模糊状态观测器的核反应堆功率T-S模糊积分控制系统[J].原子能科学技术,2013(9): 1572-1578.
[6]张前.基于Halbach阵列的平面电机控制系统的研究[D].南京: 东南大学,2010.
[7]李亚美.基于PCI总线的STM32运动控制卡的设计[J].电子设计工程,2013,21(1): 166-169.
[8]LIU G, XU H G, DUAN B L. Study on switched reluctance motor control system based on DSP[J]. Research Journal of Applied Sciences, Engineering and Technology, 2013,5(15): 3951-3955.
[9]LIU X M, LI X F. Application of an auto-disturbance rejection controller in planar motor speed control system[J]. Applied Mechanics and Materials, 2013,32(18): 899-902.
[10]崔家瑞,李擎,张波,等.永磁同步电机变论域自适应模糊PID控制[J].中国电机工程学报,2013,33(z1): 190-194.
[11]孟爱华,刘成龙,陈文艺.超磁致伸缩致动器的小脑神经网络前馈逆补偿-模糊PID控制[J].光学精密工程,2015,23(3): 753-759.
[12]肖纳川,周力,肖铎.基于模糊PID算法的电动车电机控制器研究[J].电源技术,2015,39(1): 144-146.
A Design for Precision Motion Control System Based on Fuzzy Adaptive PID
CHENYun,LIUXinmei,GUODongliang,YINJunling
(National Key Laboratory for Electronic Measurement Technology, North University of China,
Taiyuan 030051, China)
Abstract:In order to solve the issue of low accuracy, poor stability and low sensitivity of the traditional two-dimensional motion control platform in positioning, a motion control system based on fuzzy adaptive PID was designed. Designing the hardware system components and kinematics model of the system, analyzing control principle and rules of fuzzy PID algorithm. Furthermore, make simulation of fuzzy PID algorithm by MATLAB and gets the step response curve of displacement. Test shows: in the liner and circular motion positioning experiment, the system places on the X, Y two-dimensional directions, the following displacement error δ∈[-0.8μm, 0.8μm]. Totally,the system meets the requirements of high accuracy and highly stability in position well.
Key words:motion control; decoupling kinematics model; fuzzy adaptive PID; positioning accuracy
收稿日期:2015-08-31
中图分类号:TM 359
文献标志码:A
文章编号:1673-6540(2016)02- 0013- 05
作者简介:陈云(1990—),女,硕士研究生,研究方向为运动控制与优化。刘新妹(1965—),女,副教授,研究方向为动态测试和自动化检测。郭栋梁(1988—),男,硕士研究生,研究方向为信号处理和动态测试。
*基金项目:山西省研究生优秀创新项目(20143080)
猜你喜欢
制造技术与机床(2019年12期)2020-01-06
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
雷达学报(2017年1期)2017-05-17
电脑知识与技术(2016年27期)2016-12-15
企业导报(2015年15期)2016-01-18
现代电子技术(2014年17期)2014-09-17
航天返回与遥感(2014年5期)2014-07-31
现代电子技术(2014年10期)2014-07-19