
大功率电动舵机锁制器设计方案探讨
2016-03-16 05:37杨志伏陈永红
导航定位与授时 2016年3期
杨志伏,陈永红
(中国航天科工集团贵州航天控制技术有限公司,贵阳 550009)
大功率电动舵机锁制器设计方案探讨
杨志伏,陈永红
(中国航天科工集团贵州航天控制技术有限公司,贵阳 550009)
对采用电磁力驱动的两种锁制器设计方案进行了比较。计算结果表明,在同样的舵面干扰力矩载荷作用下,锁销式方案需要的电磁吸合力仅为摩擦式方案的9.25%。对锁销式锁制器采用滚动摩擦方法进行改进后,其所需的电磁力进一步降低到仅为摩擦式锁制器的6.32%。由于所需电磁力大为减少,故可大幅度降低线圈的尺寸和功耗。而大功率电动舵机的锁制器内部线圈占锁制器质量的80%以上,故采用该改进方案,可以明显减小系统的质量和功耗。
电动舵机;锁制器;摩擦;力矩
0 引言
电动舵机具有效率高、环境适应性好的特点。近年来,电动舵机向大功率、小体积方向发展[1-2]。锁制器作为电动舵机的重要附件[3],其在电动舵机开始工作前对舵机的传动装置进行锁定,以防止外界扰动对舵轴零位的影响,而在通电时能克服舵轴所受的扰动力矩而开锁。为尽可能减小开锁力矩,一般将锁制器直接作用于电机轴上[4]。大功率电动舵机的输出力矩大,舵面所受扰动力矩也比较大[5],其锁制器内部线圈匝数多,工作时电流很大,对整个系统的减重和降低功耗非常不利。减小锁制器质量的方法有两种:其一为通过控制系统使电机向扰动力矩反方向旋转以抵消一部分载荷[6-7],此方法必须先激活电动舵机伺服系统,总质量有一定减小,但总能耗降低有限[8];另一种方法是通过优化设计,直接减小锁制器的质量和功耗[9],可通过减小摩擦效应来实现,可取得质量和能耗比较平衡的效果[10]。
锁制器一般分为摩擦式和锁销式两种方案,均采用电磁线圈进行驱动。摩擦式锁制器通过电磁销推动摩擦盘,利用摩擦力对电机轴进行锁定和开锁。电磁销的销轴和一个摩擦盘固连,断电时销轴在弹簧力作用下弹出,两个摩擦盘贴合,阻止电机转动;通电时销轴收回,摩擦盘分开,电机可以自由转动。锁销式锁制器通过销轴的伸缩干涉固定于电机轴上的凸台锁制盘,进行锁定和开锁。断电时销轴在弹簧力作用下伸出,插到两个凸台之间,阻止电机转动;而通电时销轴收回,与凸台互不干涉,电机可以自由转动。两种方案如图1所示。
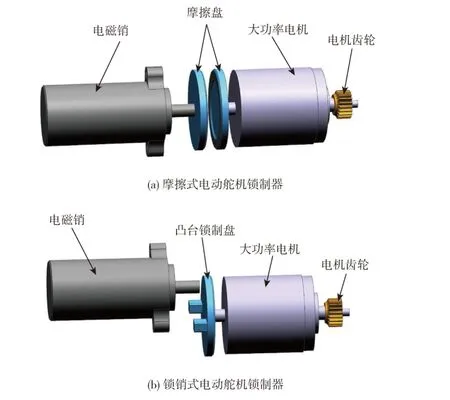
图1 电动舵机锁制器的两种设计方案Fig.1 Two design proposals of electromechanical actuator locking-apparatus
1 摩擦式锁制器受力分析
外界扰动作用于舵轴上,通过传动链传递到电机轴,设电机轴所受力矩最大值为M。断电条件下,锁制器至少要能对电机轴提供M的力矩,以阻止电机转动;通电时,锁制器必须要能克服M的力矩而开锁。
对摩擦式锁制器进行受力分析如下:
断电时,两个摩擦盘在弹簧作用下压紧,设弹簧压力为F。通电时,只要电磁吸合力大于此弹簧压力,即可保证摩擦盘脱开,解除锁定。设摩擦盘内半径为r1,外半径为r2,如图2所示。整个摩擦盘有效的摩擦面积为S。取一面积微元,离圆心距离为r,此微元面积为dS。此微元所受弹簧压力为dF,设摩擦环的摩擦系数为μ,则上述面积微元对电机轴的阻力矩为μrdF。
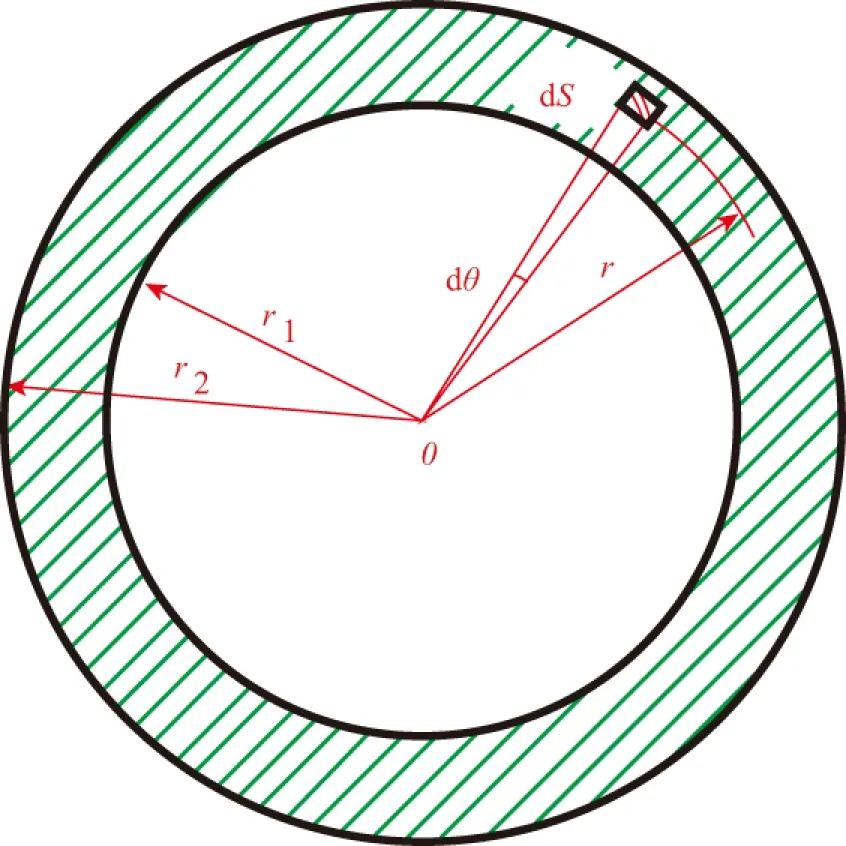
图2 摩擦式锁制器摩擦力矩计算Fig.2 Calculation of frictional moment of friction-plate conformation
考虑整个摩擦环,对上述摩擦力矩微元进行积分的即为力矩M,具体计算如下:
(1)
从式(1)中的积分求出弹簧压力F,即为电磁销保证开锁至少需要产生的吸合力,可表示为式(2)
(2)
2 锁销式锁制器受力分析
仍假设外界扰动传递到电机轴上,力矩为M。断电时,电磁销的销轴在弹簧作用下自动弹出,由于销轴对凸台的阻挡作用,电机轴不能转动。设弹簧弹力为fT,销轴与凸台的接触点离电机轴心的距离为R,则销轴所受侧向力F1大小为M/R。为尽量减小侧向力,R一般取等于电机外径。上述侧向力将产生一系列的摩擦力,见图3(a)。通电时,销轴若要顺利收回,必须要能克服摩擦力和弹簧力,即电磁吸合力fa至少要等于摩擦力和弹簧力之和,可得式(3)
fa=f1+fa2+fa3+fT
(3)
上述f1、fa2、fa3分别为上、中、下三个接触点的摩擦力。而根据力的平衡,有如下关系:
(4)
其中,F1、Fa2、Fa3分别为图3(a)中三个接触点的正压力,而μh为各个接触点的滑动摩擦系数,若采用合适的表面处理措施,可达到0.1。La1、La2为力臂长度,通过适当的结构设计,La2可以达到La1的4倍以上,这里取4倍。弹簧力的作用仅仅使销轴自动弹出,和外载荷并无关系,因此可以取较小值,这里取F1的10%。将上述条件代入式(4),可得出图3(a)所示锁销式锁制器所需的最小电磁吸合力为
fa=0.35M/R
(5)
大功率电动舵机的电机功率通常在1kW以上,一般情况下电机直径将大于0.08m,取摩擦环的外半径为0.04m,内半径为0.03m,金属摩擦材料的摩擦系数为0.3,将上述数值代入式(2),可得
fa=0.0925F
(6)
故其他条件不变时,锁销式锁制器所需的电磁吸合力不到摩擦式锁制器的10%。
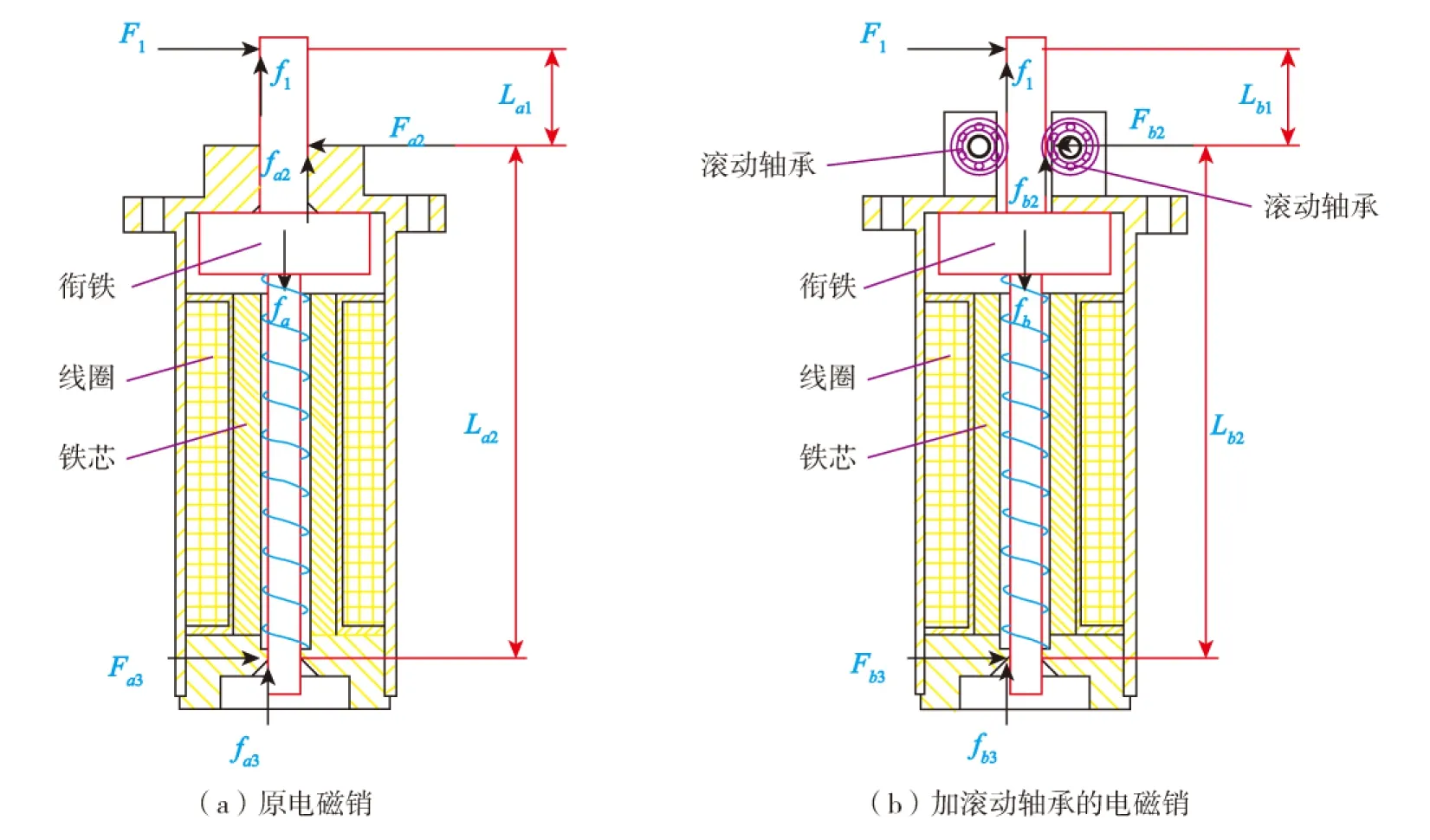
图3 电磁销内部结构和受力分析Fig.3 The structure and force analysis of electromagnetic pin
为进一步减小所需的电磁吸合力,可对电磁销的结构进行优化,如图3(b)所示,在电磁销内部增加滚动轴承。对改进的电磁销所需最小电磁吸合力分析如下
fb=f1+fb2+fb3+fT
(7)
fa2、fa3为中间和下方接触点的摩擦力。轴承平面不可能恰好在F1的受力平面内,但一般加工精度下可保证角度误差在0.5°以内。根据力的平衡,有:
(8)
其中,F1、Fb2、Fb3分别为图3(b)中三个接触点的正压力,而μh为各个接触点的滑动摩擦系数,可通过合适的表面处理措施降低到0.1。μg为滚动轴承的等效滑动摩擦系数,在受力不大的情况下轴承基本保持圆形,等效摩擦系数可达到0.01[11]。Lb1和Lb2为力臂长度。仍然将Lb2取为Lb1的4倍。取相同的参数,可得
fb=0.0632F
(9)
故同样的舵面扰动力矩作用下,改进的锁销式锁制器所需的电磁吸合力为摩擦式锁制器的6.32%。
3 结论
对摩擦式和锁销式两种电动舵机锁的锁定原理和开锁力进行了分析。摩擦式锁制器依靠摩擦力锁定舵面,其摩擦力由弹簧压力产生,而由于摩擦系数的关系,弹簧压力至少为摩擦力的3倍以上,故摩擦式锁制器开锁时需要较大的电磁力。而锁销式锁制器通过销轴干涉锁定舵面,其开锁时仅需要克服销轴的摩擦力,需要的电磁力较小。计算结果表明,在同样的舵面扰动力矩作用下,对80mm直径的电机,锁销式锁制器所需的电磁力仅为摩擦式锁制器的9.25%,而对锁销式锁制器增加滚动轴承进行改进后,其摩擦力大幅下降,最终所需电磁力可进一步降低到仅为摩擦式锁制器的6.32%。由于所需电磁力大幅降低,则锁制器内部线圈的体积、质量的功耗都大幅下降。
[1] 汪军林,解付强,刘玉浩.导弹电动舵机的研究现状及发展趋势[J].飞航导弹,2008(3):42-45.
[2] 郭宏,邢伟.机电作动系统发展[J].航空学报, 2007, 28(3): 620-627.
[3] 彭科容,何卫国.基于无刷直流电机一体化设计的舵面电磁锁制系统设计[J].微电机,2015,48(5):101-103.
[4] 张翔,马瑞卿,胡克石.航天大功率无刷电动舵机控制器研究[J].微特电机,2012,40(2): 42-47.
[5] 崔业兵,鞠玉涛,郑健,等.电动舵机力矩特性的简易测量研究[J].测试技术学报,2013(2):130-135.
[6]ArrietaO,VisioliA,VilanovaR.PIDautotuningforweightedservo-regulationcontroloperation[J].JournalofProcessControl, 2010,20(4): 472-480.
[7]YooChang-sun,KangYoung-shin,ParkBum-jin.Hardware-In-the-LoopsimulationtestforactuatorcontrolsystemofsmartUAV[J].AutomationandSystems,2010(1): 27-30.
[8]HanX,BoL,ZhangJ,etal.Designandanalysisofpowersystemoficroelectromechanicalactuator[C]/ /2010 2ndInternationalConferenceonIndustrialMechatronicsandAutomation,2010: 298-302.
[9] 杨庆贺,吴殿洋.空空导弹发射装置锁制器的开锁力设计[J].航空兵器,2000(6):19-21.
[10] 章家保.电动舵机的参数平衡设计[J].弹箭与制导学报,2013,33(5):29-34.
[11] 闻邦春.机械设计手册(第6卷)[M].北京:机械工业出版社,2010.
Discussion of High-Power Electromechanical Actuator Locking-apparatus Design Proposals
YANG Zhi-fu,CHEN Yong-hong
(GuiZhou Aerospace Control Technology Company Limited, CASIC, Guiyang 550009,China)
Two design proposals of locking-apparatus driven by electromagnetic force were compared in this paper.The calculation result shown that, compare to friction-plate conformation, the electromagnetic force request in the pin conformation was only 9.25% under the same rudderpost moment.After locking-apparatus was improved by a rolling friction structure, the electromagnetic force of the pin conformation can be reduced to just 6.32% of the friction-plate conformation request.Due to the electromagnetic force request reduced, the size and power of the coil can be much more reduced.In the high-power electromechanical actuator, the weight of the coil was more than 80% of the whole locking apparatus system, so the weight and power can be significantly reduced by using the improve structure proposed in this article.
Electromechanical actuator;Locking-apparatus;Friction;Moment
10.19306/j.cnki.2095-8110.2016.03.003
2016-03-02;
2016-04-18。
杨志伏(1982-),男,博士,工程师,主要从事电动舵机结构优化设计工作。E-mail: hityangzf@126.com
V414.1
A
2095-8110(2016)03-0014-04
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
商品与质量(2021年43期)2022-01-18
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
电子制作(2018年1期)2018-04-04
山东青年(2016年12期)2017-03-02
航空模型(2016年5期)2016-07-25
创新作文(1-2年级)(2016年4期)2016-05-14
航天制造技术(2016年6期)2016-05-09
航天制造技术(2016年6期)2016-05-09
