Lokomat机器人步态康复训练对半月板损伤患者下肢功能影响
2016-03-15 07:49:01郭洋李岩李旗
华北理工大学学报(医学版) 2016年1期
郭 洋 李 岩 李 旗
天津华兴医院康复科 天津 300270;①天津市滨海新区大港医院中医科;②华北理工大学
Lokomat机器人步态康复训练对半月板损伤患者下肢功能影响
郭洋李岩①李旗②
天津华兴医院康复科天津300270;①天津市滨海新区大港医院中医科;②华北理工大学
[摘要]①目的探讨Lokomat机器人下肢康复训练对半月板损伤关节镜术后患者步行功能的影响。②方法将90例半月板损伤关节镜术后患者按随机数字表法分为A、B、C 3组,每组各30例。A组采用常规康复治疗,B组应用Lokomat机器人下肢康复训练治疗,C组常规康复治疗配合Lokomat机器人下肢康复训练,3组均治疗2个月。于康复治疗前及治疗1、2个月后对患者膝关节能量、支撑力矩、摆动力矩进行测定比较。③结果3组康复治疗1个月后膝关节能量,两两比较差异有统计学意义(T=2.707,P=0.015;T=-2.975,P=0.008;T=-5.203,P=0.000),且C组优于B组,B组优于A组。治疗后2个月,C组优于B组、A组(T=-5.392,P=0.000;T=-3.663,P=0.002)。C组与A组比较治疗1、2个月后膝关节支撑力矩差异有统计学意义,且C组优于A组(T=-2.147,P=0.046;T=-2.913,P=0.009)。三组治疗1、2个月后膝关节摆动力矩,两两比较差异有统计学意义(T=-10.220,P=0.000;T=-2.153,P=0.045;T=-23.518,P=0.000;T=-5.630,P=0.000;T=-12.006,P=0.000;T=-3.693,P=0.002),且C组优于B组,B组优于A组。④结论Lokomat机器人下肢康复训练可以增大半月板损伤关节镜术后患者下肢运动过程中膝关节能量及膝关节支撑力矩、摆动力矩,提高步行功能。
[关键词]半月板损伤步态康复训练Lokomat机器人
Effect of lokomat automatic roboton lower limb function in postoperative patients with arthroscopic meniscal injury
GUOYang,LIYan,LIQi
(RehabilitationDepartmentofTianjinHuaxingHospital,Tianjin300270,China)
[ABSTRACT]ObjectiveTo investigate effect of lokomat automatic roboton lower limb function in postoperative patients with arthroscopic meniscal injury. MethodsTotally 60 postoperative patients with arthroscopic meniscal injury were enrolled in this study,and they divided randomly into A,B,C group(n=30).A group were treated with basicrehabilitation therapy for 2 months.B group treated with Lokomat automatic roboton techniques for 2 monthsBesides the basic rehabilitation therapy,C group were also treated with Lokomat automatic roboton techniques for 2 months.The energy,support moments and shaking moments of the knee joint were measuredat the beginning of the treatment,1 and 2 months after treatment.Results3 groups of knee joint energy after 1 months of therapy,comparing two significant differences(T=2.707,P=0.015;T=-2.975,P=0.008;T=-5.203,P=0.000),group C is better than that of group B and, group B is better than that of group A; 2 months after treatment, group C is better than that of group B, group A (T=-5.392,P=0.000;T=-3.663,P=0.002). Group C compared with group A 1, 2 months after treatment knee support moment have significant differences,group C three groups is better than that of group A (T=-2.147,P=0.046; T=-2.913,P=0.009). After 1, 2 months treatment knee shaking joint moment, there was A significant difference comparing, group C is better than that of group B and group B than in group A(T=
-10.220,P=0.000; T=-2.153,P=0.045; T=-23.518,P=0.000; T=-5.630,P=0.000;T=-12.006,P=0.000;T=-3.693,P=0.002).ConclusionThe lokomat automatic roboton treatment can improve lower limb function in postoperative patients with arthroscopic meniscal injury.
[KEYWORDS]Meniscus.Roboton.Gait
半月板损伤是常见的运动损伤性疾病之一,关节镜微创治疗技术的广泛应用使其治疗取得良好的效果,而如何提高术后患者下肢步行功能引起诸多医学者的重视[1~3]。目前临床上提高术后患者下肢步行功能多采用传统医学和康复手法治疗,方法单一,治疗效果欠佳,给患者带来经济和精神双重压力。随着科技进步,机器人步态康复训练进入医学领域,并取得了一定疗效。本研究利用 Lokomat 全自动机器人步态康复训练对半月板损伤关节镜术后患者步行功能进行干预,观察其疗效,报告如下。
1对象与方法
1.1研究对象选取2012年1月~2013年12月本院康复科住院和门诊的单纯半月板损伤关节镜术后患者90 例,严格按随机数字表法将入选病例分为A、B、C 3组,每组30例。3组年龄、性别、病程、病灶部位间具有均衡性,见表1。

±s)
1.2治疗方法
1.2.1A组采用常规康复疗法。主要采用传统康复治疗,包括被动活动关节、膝关节控制训练、站位平衡及步态训练等,以上训练每次30min,1次/d,共治疗2个月。
1.2.2B组采用Lokomat机器人康复训练方法。机器人(瑞士Hocoma公司)步态康复训练为主,每次30min,1次/d,共治疗2个月。按照Lokomat下肢步态训练康复机器人训练方法[4],训练前对患者腿部的长度进行测量,调节绑带的尺寸和机器人装置。初始调节减重重量一般为患者体重的60%;次引导力为30%,步速在1.5~1.7km/h,以后根据患者的恢复情况逐步减少减重重量和增加跑步台的速度。
1.2.3C组训练方法。C组在常规康复疗法基础上,采用Lokomat机器人步态康复训练,方法同上。
1.3疗效评定方法于治疗前、治疗1个月、2个月后应用患者步态评定系统评定膝关节能量、支撑力矩、摆动力矩。其详细描述及参数调节见参考文献[5]。

2结果
2.13组患者膝关节能量比较3组治疗前比较膝关节能量差异无统计学意义(P>0.05);治疗后1、2个月膝关节能量与治疗前比较,差异有统计学意义(P<0.05);治疗后1个月与2个月比较,差异有统计学意义(P<0.05);治疗后1个月,3组间两两比较差异有统计学意义(P<0.05),且C组优于B组,B组优于A组;治疗后2个月,A、B组与C组比较差异有统计学意义(P<0.05),C组优于A、B组见表2。

±s)
注:与治疗前比较,*P<0.05;与治疗2个月比较,#P<0.05;与A组比较,▲P<0.05;与B组比较,■P<0.05。2.23组患者膝关节支撑力矩比较3组治疗前比较膝关节支撑力矩差异无统计学意义(P>0.05);治疗后1、2个月膝关节支撑力矩与治疗前比较,差异有统计学意义(P<0.05);治疗后1个月与2个月比较,差异有统计学意义(P<0.05);治疗后1、2个月, A组与C组比较,C组优于A组,差异有统计学意义(P<0.05),见表3。
2.33组患者膝关节摆动力矩比较3组治疗前比较膝关节摆动力矩差异无统计学意义(P>0.05);治疗后1、2个月膝关节摆动力矩与治疗前比较,差异有统计学意义(P<0.05);治疗后1个月与2个月比较,差异有统计学意义(P<0.05);治疗后1、2个月,3组间两两比较C组优于B组,B组优于A组,差异有统计学意义(P<0.05),见表4。

±s)
注:与治疗前比较,*P<0.05;与治疗2个月比较,#P<0.05;与A组比较,▲P<0.05
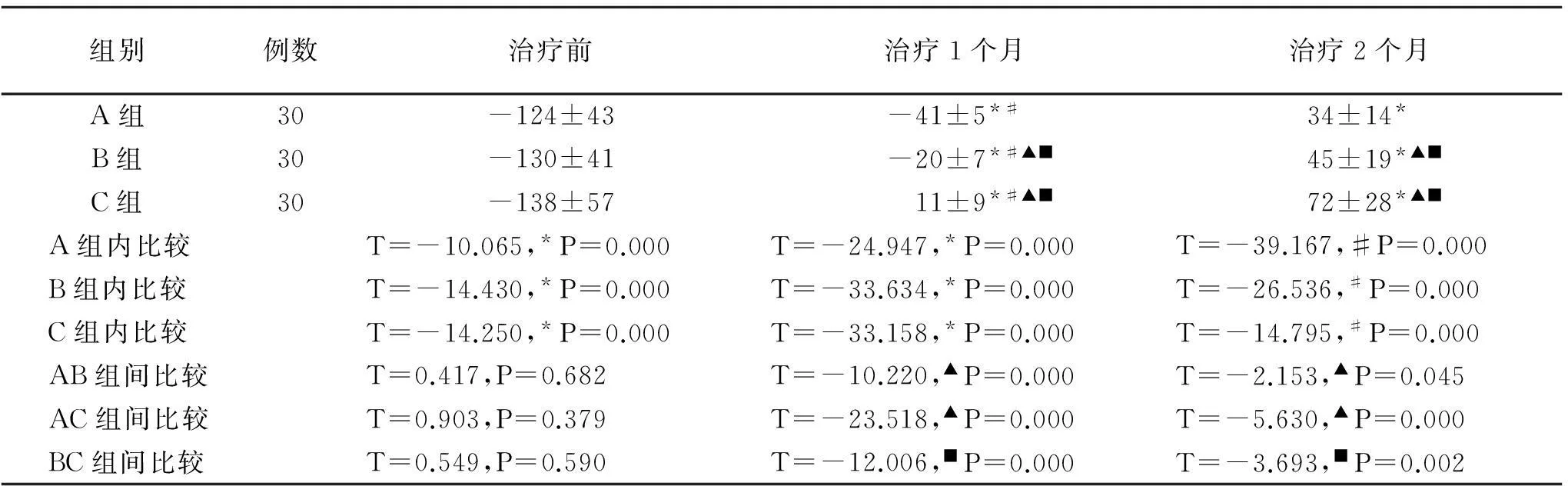
表4 3组患者膝关节摆动力矩比较
注:与治疗前比较,*P<0.05;与治疗2个月比较,#P<0.05;与A组比较,▲P<0.05;与B组比较,■P<0.05
3讨论
膝关节半月板是膝关节重要的组成部分,有保持关节稳定性、润滑、减少震荡等作用,半月板受到损害直接影响膝关节运动功能。半月板损伤关节镜术虽然起到了良好的治疗作用,但仍存在部分膝关节运动功能的缺失,严重影响日常生活及工作,因此,半月板损伤术后康复越来越引起医学者的重视,采用传统与现代康复结合的方式进行治疗取得了良好的效果[6~10]。近年来,机器人步态训练仪应用在康复医疗中以矫正下肢关节运动,改善下肢运动功能,提高下肢运动平衡能力,已经逐渐得到认可[11~15]。
本研究在常规康复训练的基础上,应用Lokomat 全自动机器人步态训练仪对单纯半月板损伤关节镜术后患者进行康复治疗,并对其产生的异常步态进行评定。结果显示,康复治疗1、2个月后传统康复、机器人步态训练、传统康复配合机器人步态训练3种治疗方法不同程度上改善单纯半月板损伤关节镜术后患者膝关节能量、支撑力矩、摆动力矩。3种治疗方法治疗1个月后膝关节能量,两两比较有显著差异,且传统康复配合机器人步态训练治疗方法优于机器人步态训练,机器人步态训练优于传统康复;治疗后2个月,传统康复配合机器人步态训练优于传统康复、机器人步态训练。治疗1、2个月后传统康复与传统康复配合机器人步态训练组,膝关节支撑力矩与治疗前比较有显著差异,且传统康复配合机器人步态训练优于传统康复治疗方法。3种治疗方法治疗1、2个月后膝关节摆动力矩,两两比较有显著差异,且传统康复配合机器人步态训练治疗方法优于机器人步态训练,机器人步态训练优于传统康复治疗。表明传统康复治疗配合Lokomat全自动机器人步态训练方式可以增大单纯半月板损伤关节镜术后患者下肢运动过程中膝关节支撑力矩、摆动力矩及膝关节能量,矫正下肢关节运动,改善下肢运动功能,提高下肢运动平衡能力。此外我们应用Lokomat步态分析系统提高了步态分析的客观性、准确性、可信性,使临床医生可根据患者步态存在的具体问题进行有针对性的治疗,及时修改治疗方案,减少盲目性,可进一步提高患者的步行功能。从而为建立传统康复与现代康复结合治疗膝关节半月板损伤步态标准化提供理论基础。
参考文献
[1]葛敏,朱振杰.膝关节镜治疗半月板损伤86例康复与护理[J].交通医学,2012,26(6):657-658
[2]张会军,孙宏梅,柴会悦.膝关节镜治疗半月板损伤围手术期的康复护理[J].中国社区医师,2012,14(10):345
[3]王砚书,董秀玉,李娜.关节镜下半月板损伤术后并发症的预防及康复指导[J].中国实用医药,2012,7(11):233-234
[4]郝正玮,李建民,赵雅宁,等.Lokomat 下肢康复机器人对缺血性脑卒中偏瘫患者下肢功能的影响[J].现代预防医学,2013,40(8):1558-1559
[5]郭素梅,李建民,吴庆文,等. Lokomat 全日动步态训练与评定系统的应用[J].中国医疗设备,2011,26 (3):94-96
[6]胡伟,李萍,李蓬东,等.强化平衡训练的早期康复治疗对半月板损伤后功能的影响[J].海南医学,2014,25(2):186-188
[7]邵正海,张玉发,吕宏,等.等速训练对膝半月板损伤关节镜手术后膝关节功能恢复及关节周围肌肉力量的影响[J].中国医药导刊,2014,16(4):612-613
[8]何立群,汪毅.中医治疗配合康复训练对半月板损伤术后重竞技运动员膝关节功能恢复的影响[J].中国运动医学杂志,2013, 32(9):784-787
[9]肖冰,庞杰.肌内效贴扎术对运动员半月板损伤术后早期康复疗效观察[J].南京体育学院学报( 自然科学版),2013,12(4 ):34-35
[10]郭静,刘晓燕,汪建英.分段式康复护理法对关节镜治疗半月板损伤效果分析[J].四川中医,2013,31(8):161-162
[11]Hidler J,Nichols D,Pelliccio M,et al. Advances in the understanding and treatment of stroke impairment using robotic device[J].Top Stroke Rehabil,2005,12(2):22-35
[12]Lunenburger L,Colombo G,Riener R,et al. Clinical assessments performed during robotic rehabilitation by the gait trainingrobot Lokomat[C].Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics. Chicago, USA,2005: 345-348
[13]Bolliger M,Banz R,Dietz V,et al.Standardized voluntary force measurement in a lower extremity rehabilitation robot[J].J Neuroeng Rehabil,2008,5(4):1-23
[14]席向朝,陈金春,张顺开,等.脑卒中患者 Lokohelp 机器人下肢康复训练减重系数与康复效果相关性的临床研究[J].中国现代医生,2014,52(3):6-10
[15]方涛涛,韩建海,王会良,等.新型卧式下肢康复训练机器人机械系统设计[J].中国康复医学,2013,28(3):246-250
(张爱国编辑)
【通讯作者】李岩。
【作者简介】郭洋(1981-),主治医师。研究方向:中医内科学与康复医学。
【基金项目】河北省中医药管理局科技计划项目(编号:2014188)。
[中图分类号]R 493
[文献标识码]A
[文章编号]2095-2694(2016)01-012-4
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
中华骨与关节外科杂志(2021年12期)2021-08-31 09:10:02
中华养生保健(2020年10期)2021-01-18 06:45:58
中华肩肘外科电子杂志(2019年4期)2019-08-24 06:39:14
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
腹腔镜外科杂志(2016年9期)2016-06-01 12:10:07
磁共振成像(2015年9期)2015-12-26 07:20:31
中国当代医药(2015年21期)2015-03-01 02:05:12
发明与创新(2015年33期)2015-02-27 10:40:00