
一种舰载无人机IMU/GPS组合导航系统研究*
2016-03-15 04:46杨益兴
舰船电子工程 2016年2期
关键词:全球定位系统
杨益兴
(海军驻武汉701所军事代表室 武汉 430064)
一种舰载无人机IMU/GPS组合导航系统研究*
杨益兴
(海军驻武汉701所军事代表室武汉430064)
摘要针对舰载无人机的特点,设计了一种适用于舰载无人机的低成本IMU/GPS组合导航系统,提出了加入磁航向仪完成初始对准和提供航向基准的方法,并进行了相应仿真,仿真结果表明能满足系统导航精度要求。
关键词舰载无人机; 惯性测量元件; 全球定位系统; 组合导航
Study of IMU/GPS Composed Navigation System for Shipboard UAV
YANG Yixing
(Navy Representative Office in Wuhan 701 Research Institute, Wuhan430064)
AbstractIn view of the characteristics of shipboard unmanned aerial vehicle(UAV), a IMU/GPS composed navigation system is designed at a low cost. In this design, magnetic course indicator is used to complete initial alignment and provide heading reference. Simulation results indicate that the precision of the navigation system is able to satisfy the requirements of UAV.
Key Wordsshipboard UAV, IMU, GPS, composed navigation
Class NumberV249
1引言
舰载无人机以成本低、体积小、作战灵活、无生命危险等优势,得到了世界各国海军的广泛认可。为满足未来舰艇作战的需要,长航时成为舰载无人机的一个发展方向,这就对导航定位精度提出了很高的要求。同时,舰载无人机还要求其导航系统应当体积小、重量轻。本文在考虑舰载无人机特点及其对导航定位需求的基础上,设计出一种低成本的IMU/GPS组合导航定位系统[1~3]。
2系统组成
导航系统可采用IMU(惯性测量元件)+GPS OEM板+磁航向仪(电子罗盘)实现[4]。其总体方案如图1所示。
1) IMU(惯性测量元件)
由三个微加速度计和微陀螺仪组成,能够输出三轴的角速度和线加速度。与传统的惯性传感器相比,具有体积小、重量轻、成本低、功耗低、可靠性高和寿命长等优点,体积10cm×10cm×10cm左右,重量0.5kg~1.5kg,功耗2W~10W余。因而非常适合无人机上使用。然而由于精度比较低,必须和GPS组合使用。

图1 无人机组合导航系统总体框图
IMU主要作用在于提供无人机姿态信息和较高频率的数据输出[4]。
2) GPS OEM板
为减轻无人机负载,机上GPS采用OEM板。大小几厘米到十几厘米见方,厚度1cm~2cm,重量几克到几十克,功耗数瓦[5]。
3) 磁航向仪
使用磁敏感器件感测地球磁场的方向,即磁子午线方向,并给出飞机纵轴相对磁子午线在水平面内的夹角,及磁航向角。经过磁差补偿获得真航向。大小数厘米见方,重量几十克,功耗数瓦[6]。
磁航向仪作用是帮助IMU实现初始方位对准。由于惯导系统方位对准精度主要受陀螺漂移的影响,对于高精度的惯导系统,对准精度可以达到几个角分,但是对于低成本的IMU,方位对准精度为几度或者十几度,其陀螺漂移大于地球自转角速度,不能自主完成方位对准,因而在总体方案中加入磁航向仪,利用磁航向仪给出的航向代替初始对准时的航向角ψ。同时磁航向仪也可作为无人机飞行时的航向基准[7~8]。
4) 导航计算机
主要完成数据采集、惯导初始对准、姿态解算,定位解算、速度解算、组合导航解算等。可以是单独的计算机,也可以和飞行控制、通讯用计算机合二为一。根据高性能、低功耗、支持串口,具有数据存储功能等要求,可采用ARM等嵌入式模块[9]。
5) 电源
供给IMU、GPS、磁航向仪、计算机所需的直流电。
3组合导航方案
本文采用集中Kalman滤波器作为组合导航算法,组合方式见图2,采用松散组合,即将IMU和GPS计算输出的位置和速度信息的差值,以及IMU与磁航向仪输出的航向信息差值作为量测值,送入Kalman滤波器估计IMU的误差,然后对IMU进行校正。整个结构如图2所示。这种组合方式比较简单,易于工程实现,并且系统间仍然独立工作,使导航信息有一定的冗余度。
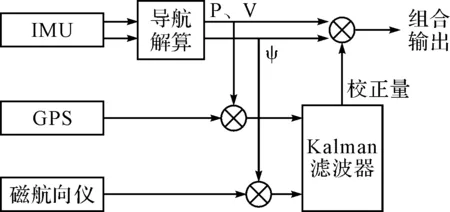
图2 组合方式
3.1组合导航系统状态方程和量测方程
惯导系统误差方程为[10]
其中
XINS=[δLI,δλI,δhI,δvIE,δvIN,δvIU,

δKgx,δKgy,δKgz,δKax,δKay,δKaz]T
GPS位置和速度误差视为一阶马尔可夫过程,其误差方程为
其中XGPS=[δLGPSδλGPSδhGPSδvEGPSδvNGPSδvUGPS]T
磁航向仪的航向误差视为一阶马尔可夫过程
组合导航系统的状态方程为
(1)
量测方程为
(2)
3.2卡尔曼滤波方程
将式(1)、(2)离散化可得
Kalman滤波方程为
4仿真结果
根据组合导航方案,按照如下初始条件,分别进行了IMU和IMU/GPS/磁航向仪组合导航仿真。
初始条件:
初始速度:25m/s,航向135°,高度0m,俯仰角15°;
加速度计:零偏重复性:2mg;随机偏差:0.3mg;比例因子稳定性:0.2%;
GPS:水平定位精度:1.8m(1σ),垂直定位精度:5m(1σ),速度误差0.1m/s(1σ);
磁航向仪:航向精度:0.5°(1σ);
航迹:爬升2500m→平飞2000s→转弯40°→平飞2900s。
由于篇幅有限,只给出二维位置误差仿真结果,如图3~图6所示。

图3 IMU纬度误差

图4 IMU经度误差

图5 组合导航纬度误差

图6 组合导航经度误差
从仿真结果可以看出:
1) 从仿真结果可以看出IMU漂移很大,无法单独使用,但在一分钟内定位精度可以保证在100m以内,因而可以作短时使用。
2) 由于IMU精度较低,整个导航系统精度主要取决于GPS精度,因而要根据系统导航精度指标要求选取相应的GPS。如果想减小工作量,也可以直接利用GPS和磁航向仪输出修正惯导结果,精度影响不大,但输出波动比较大。
5结语
在考虑舰载无人机特点及其对导航定位需求的基础上,本文提出了一种IMU+GPS-OEM板+磁航向仪的组合导航方案。仿真结果表明,系统导航精度主要由GPS保证,而IMU则保证导航数据具有较高的更新率和提供姿态信息,两者互为补充,提高了系统的可靠性和抗干扰能力,组合导航系统在精度和可靠性方面,较单一的导航系统都有明显的改善。
参 考 文 献
[1] 高嘉景.海军舰载无人机的现状及其发展趋势[J].舰船电子工程,2004,24(3):16-18.
[2] 张小红,郭斐,李星星.GPS/GLONASS组合精密单点定位研究[J].武汉大学学报,2010,35(1):9-12.
[3] 刘庆元,郝立良,黄书捷,等.改进的UKF在GPS/INS组合导航中的应用[J].测绘科学技术学报,2014,31(5):450-453.
[4] 郭雪蛟,周海银,潘晓刚.抑制UKF发散的改进算法在卫星轨道确定中的应用[J].上海航天,2012,29(6):26-31.
[5] 汪秋婷.自适应抗差UKF在卫星组合导航中的理论与应用研究[D].武汉:华中科技大学,2010:11-12.
[6] 王冲,曾庆军.自适应滤波算法在AUV组合导航中的方法[J].中南大学学报:自然科学版,2013,44(7):155-159.
[7] 罗建军.组合导航原理与应用[M].西安:西北工业大学出版社,2012:60-80.
[8] 刘庆元,郝立良,黄书捷.神经网络辅助的GPS/MEMS-INS组合导航算法[J].测绘科学技术学报,2014,31(4):336-341.
[9] 李星星,张小红,李盼.固定非差整数模糊度的PPP快速精密定位定轨[J].地球物理学报,2012,55(3):833-840.
[10] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998:22-50.
中图分类号V249
DOI:10.3969/j.issn.1672-9730.2016.02.009
作者简介:杨益兴,男,高级工程师,研究方向:舰船电子武备设计与监造。
*收稿日期:2015年8月3日,修回日期:2015年9月25日
猜你喜欢
疯狂英语·新悦读(2022年10期)2022-12-04
英语文摘(2021年10期)2021-11-22
红领巾·探索(2018年12期)2018-01-26
小猕猴学习画刊(2018年12期)2018-01-19
江苏农业科学(2017年4期)2017-05-08
科技资讯(2017年2期)2017-03-27
湖北农业科学(2016年24期)2017-03-18
现代电子技术(2014年19期)2014-10-17
