
基于CPN Tools的航母编队远程协同防空指挥控制模型研究*
2016-03-15 04:46赵秦豫李照顺蓝湾湾
舰船电子工程 2016年2期
赵秦豫 李照顺 蓝湾湾 吴 琦
(海军指挥学院 南京 211800)
基于CPN Tools的航母编队远程协同防空指挥控制模型研究*
赵秦豫李照顺蓝湾湾吴琦
(海军指挥学院南京211800)
摘要针对航母编队远程防空问题,分析了预警机协同舰载机进行远程防空作战指挥控制过程,并运用CPN Tools仿真平台建立了航母编队远程协同防空作战中的相关指挥控制模型,包括顶层模型、目标模型、防空响应模型、预警机探测引导模型、编队指挥所指挥控制模型和舰载机模型,为航母编队远程协同防空作战指挥控制动态仿真分析奠定了基础。
关键词航母编队; 协同防空; 指挥控制; CPN Tools
Command and Control Model of Remote Cooperative Air Defense for Aircraft Carrier Formation Based on CPN Tools
ZHAO QinyuLI ZhaoshunLAN WanwanWU Qi
(Naval Command College, Nanjing211800)
AbstractIn view of the problems about remote air defense for aircraft carrier formation, it was analyzed that the process of the command and control about remote cooperative air defense with shipboard aircraft and AEW. Some related command and control models were established for aircraft carrier formation through the CPN Tools, which included the top model, the target model, the air defense response model, the AEW detection and guide model, the command and control model of the Formation Command Post and the shipboard aircraft model. These models would lay the foundation for the dynamic simulation of the command and control about remote cooperative air defense for aircraft carrier formation.
Key Wordsaircraft carrier formation, cooperative air defense, command and control, CPN Tools
Class NumberE911
1引言
从近几十年的几场局部战争来看,空中打击是现代作战的典型样式。航母编队作为海上作战行动中的主要突击兵力,必将受到敌方航空兵和反舰导弹的重点打击。
信息化条件下航母编队协同防空就是将不同性能、类型的防空武器和相应的情报搜集、情报处理与辅助决策、通信、电子战等装备组成系统,与空袭系统之间进行体系与体系的对抗,在武器装备所及范围内,编队指挥员需合理使用各种对空设备与武器,高效拦截打击空中威胁目标。目前,航母编队的对空防御体系主要由三道对空警戒幕和三道对空拦截幕组成[1]。在航母编队协同防空作战中采用层次协同的方法,由航母本舰负责内层防御、水面舰艇负责近层防空,水面舰艇区域防空战术群负责中层防空,舰载机战术群负责远层防空[2]。
在航母编队中,舰载机是编队最主要的作战力量之一,具有反应时间快、作战范围广、打击强度大、打击效果好等特点,因此在编队协同防空作战中担负着重要的使命。但由于其自身的探测范围有限及受地球曲率的影响,很难发挥机载武器的远程打击能力,因此,由预警机、舰载战斗机和电子战飞机组成的防空作战力量构成了航母编队的远程防空区,力图在敌机发射反舰导弹前将其击落[3]。本文旨在研究航母编队中预警机与舰载机协同进行远程防空作战的指挥控制问题,并利用CPN Tools[4]仿真平台建立相关Petri网模型。
2航母编队远程协同防空作战指挥控制过程
远程防空拦截由航母舰载战斗机担任,主要拦截敌来袭飞机和导弹,力图在敌导弹射界之外或敌机占领发射阵位之前将其击落。在远程防空作战中,编队指挥所接收预警机等预警探测平台上报的目标数据,进行实时融合处理,形成编队统一态势,并向编队中其他作战单元及其他协同兵力平台分发,舰载机接收其他平台的目标指示信息及编队指挥所的命令信息对来袭导弹或敌机进行拦截打击。舰载机可以根据编队指挥所的指挥引导命令进行机动和攻击,同时也可以由受委托的预警机来进行指挥引导。预警机在指挥引导舰载机实施空中拦截的同时,引导电子战飞机对敌机雷达和通信装备实施电子干扰,掌握制电磁权,为了简化模型,文中暂不考虑电子战飞机模块。
舰载机在指挥引导下飞向预定攻击阵位,经任务分配,在收到攻击命令后对敌方来袭目标进行拦截打击,并进行毁伤评估,若打击失败,尚未突防时继续实施拦截打击,当舰载机完成作战任务后撤出战场,若外层防御被突破,则由中程区域的水面舰艇运用舰对空导弹应对突防的导弹和敌机。具体流程如图1所示。

图1 远程防空指挥控制流程
3基于CPN Tools的航母编队远程协同防空作战指挥控制模型
根据对航母编队远程协同防空作战指挥控制过程的分析,建立基于CPN Tools的预警机与舰载机协同进行远程防空作战指挥控制模型,这里主要分为六个模块。
假设编队指挥所授权预警机对舰载机进行指挥引导和远程目标指示。在CPN Tools仿真平台上建立指挥控制模型,在Top页上建立顶层模型,描述了目标和响应之间的信息传递关系;在Target子页建立来袭目标模型,描述目标状态的变化;在Response子页建立防空响应模型,描述防空响应过程;在aircraft_carrier子页建立编队指挥所指挥控制模型,描述编队指挥所的指挥控制过程;在early_waring_plane子页建立预警机探测引导模型,描述预警机探测引导过程;在ship_board_aircraft子页建立舰载机模型,描述舰载机工作过程。
3.1顶层模型
顶层模型描述的是目标和防空响应之间的信息传递关系,如图2所示。

图2 顶层模型
变迁Target和变迁Response分别为目标活动变迁和防空响应变迁,其中Target会改变目标状态,随着仿真时间的推移,目标状态持续更新,而Response只是使用目标信息。模型中各替代变迁之间的库所表示子层页面之间的接口;指向替代变迁的弧表示接口向子层页面的输入信息,背离替代变迁的弧表示子层页面向端口输出信息[5]。
3.2目标模型
本文中涉及的目标属性包括:舷角(Azi)、距离(Dis)、高度(High)、速度(Speed)、平均雷达截面积(Acre)以及目标类型(Type)[6]。声明目标信息的变量类型为Tar,是由七个整型变量组合而成的复合变量,其定义为
colset Tar = product X*X*X*X*X*X*X;
Tar中各个变量与目标定义中各个属性的对应关系为:
Tar ↔ tar:{Azi,Dis,High,Speed,Acre,k1,Type}
其中k1为状态控制变量,表示对于目标系统所处的防空响应阶段。k1=1,表示预警探测;k1=2,表示目标跟踪;k1=3,表示攻击。
time_tar中存储的为目标的时延控制信息(k:整形托肯),目标状态每变化一次,k的可用时间加1,即到下一仿真周期内变迁Target才能发生。其模型如图3所示。

图3 目标模型
3.3防空响应模型
防空响应模型如图4所示,替代变迁early_waring_plane、aircraft_carrier、ship_board_aircraft分别代表预警机探测引导模块、编队指挥所指挥控制模块和舰载机模块。

图4 防空响应模型
当目标在early_waring_plane模块的探测范围内时,early_waring_plane模块触发,并按照规则将预警探测信息发送给aircraft_carrier,经融合处理后反馈给early_waring_plane,并根据规则触发ship_board_aircraft模块,最后由early_waring_plane模块对ship_board_aircraft进行触发控制。
模型中主要库所和变迁的代表意义如表1所示。
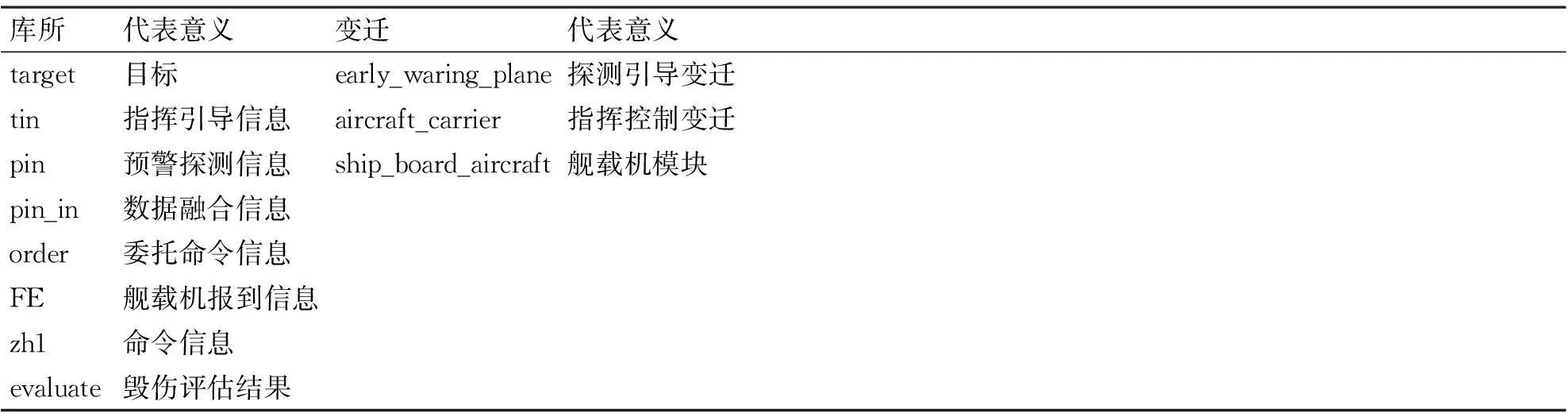
表1 库所和变迁意义
3.4预警机探测引导模型
预警机探测引导模型如图5所示。预警机主要负责对空、对海远程预警,在编队指挥所授权下,也可担负舰载机的指挥引导。预警机作战系统包括搜索雷达、敌我识别器、导航系统、数据链系统等设备。其中搜索雷达能够完成对目标的探测、跟踪和显示,是系统的核心。所以对搜索雷达模块进行了比较细致的建模。预警机在编队指挥所授权下,负责指挥引导舰载机对来袭威胁目标进行打击拦截。舰载机编队集结飞往作战空域时向预警机报到,预警机指挥引导舰载机编队,并根据战术态势,完成各类引导解算,向舰载机提供作战引导信息和远程目标指示信息[7]。

图5 预警机探测引导模型
模型中主要库所和变迁的代表意义如表2所示。

表2 库所和变迁意义
其中替代变迁Radar模型如图6所示。
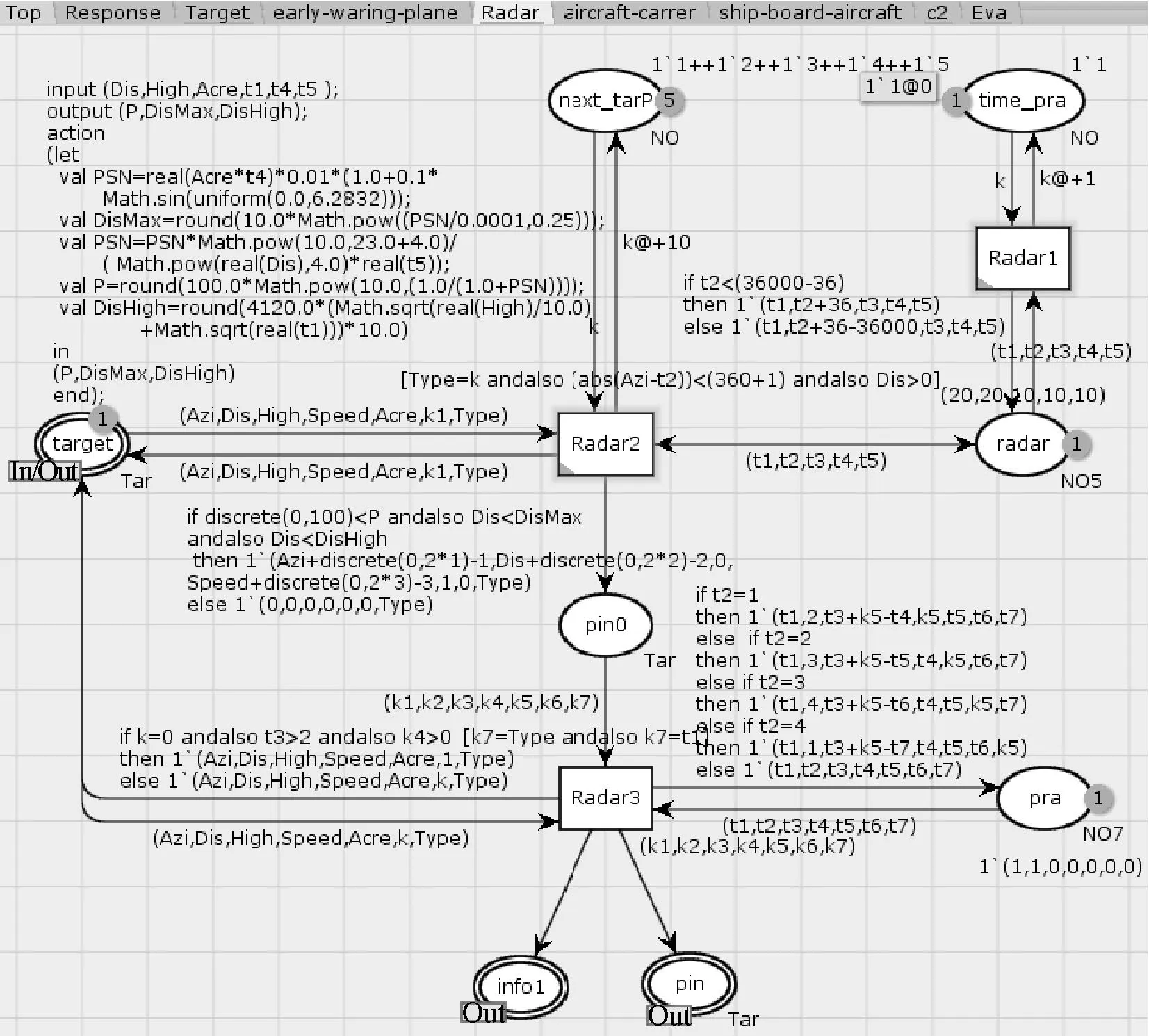
图6 Radar模型
该模型以目标(target)作为输入信息,输出预警探测信息(pin)。radar为搜索雷达,其类型为NO5,对于雷达属性选择,radar为由五个整形变量组合而成的复合变量。radar各变量与所选的雷达属性的对应关系为:
雷达属性:{雷达高度,扫描方位,扫描周期,虚警概率,接收机噪声功率}
radar:(t1,t2,t3,t4,t5)
图6中左上角为Radar2代码段,可以得出雷达对于目标的探测概率(P)、最大探测距离(DisMax)、雷达视距(DisHigh)。
pin0为Radar2扫描目标发现与否的反馈信息,类型为Tar。信息中包含目标距离、舷角和类型等基本信息以及是否发现目标的信息,其形式如下所示:
pin0:{舷角,距离,0,速度,0or1,0,类型}
pin0:(k1,k2,k3,k4,k5,k6,k7)
其中,k5=1表示发现目标,k5=0表示未发现目标。库所pra记录最近四次扫描目标的发现情况,库所next_tarP和库所time_pra为时延控制库所。
3.5编队指挥所指挥控制模型
编队指挥所指挥控制模型如图7所示。
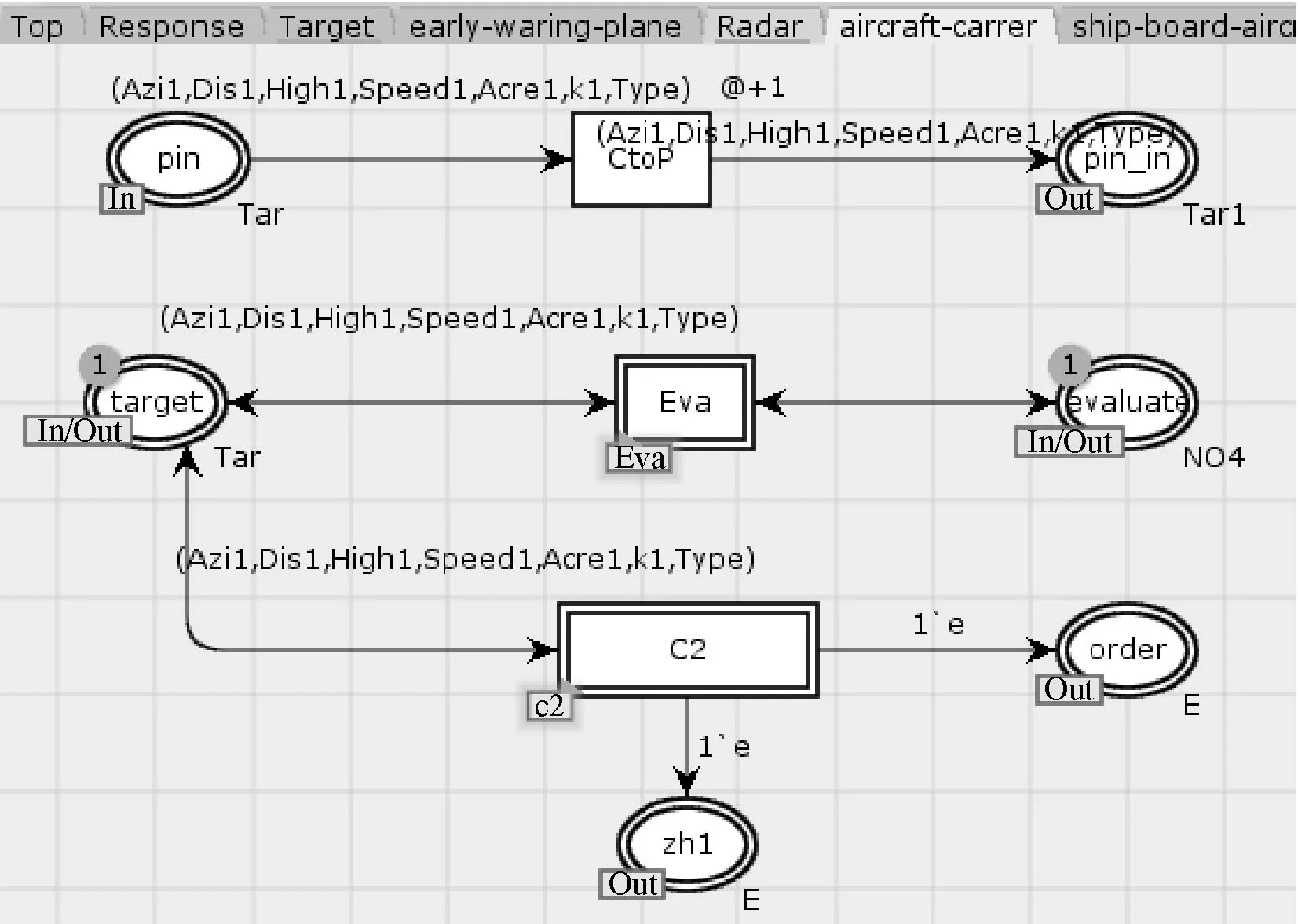
图7 编队指挥所指挥控制模型
编队指挥所是舰载机协同防空作战的主要决策者,负责拦截目标的分配、舰载机的协调以及火力的分配,预警机在收到编队指挥所的委托命令后指挥引导舰载机对目标实施拦截。编队指挥所将预警机和其他传感器平台获得的目标信息进行融合后,再将态势信息分发给预警机,并根据综合态势向舰载机下达任务分配命令。
该模型描述编队指挥所的指挥控制过程。输入端pin为从early_waring_plane子层获得的预警探测信息,输出端pin_in为融合后态势信息,变迁CtoP表示数据融合过程。模型中还包括两个替代变迁Eva和C2,分别为毁伤评估及任务分配模块,由于篇幅所限,在此不详细介绍。
3.6舰载机模型
在完成目标搜索、识别、跟踪以及确认对威胁目标进行打击后,舰载机将在预警机的指挥引导下进入攻击阵位,进行协同打击。其模型如图8所示。

图8 舰载机模型
此页面分两部分,WC(武器控制系统)和MANEUVER(机动决策系统)。其中tin和zh1为输入端口,tin表示从early_waring_plane子层获得的指挥引导信息,zh1表示编队指挥所的命令信息,FE表示给early_waring_plane子层的报到信息。
各变迁含义如下:
· Engage:把从预警机传来的战术引导和目标指示信息分发给武器控制系统和机动决策系统;
· Arrive:进行战术机动以满足武器发射要求;
· Fire:对目标进行打击;
· BD:根据编队指挥所的命令接敌并向预警机报到。
4结语
舰载机是航母编队远程防空作战中的主要作战力量,本文利用CPN Tools仿真平台建立了航母编队远程协同防空作战中相关的指挥控制模型,并使用CPN Tools中的交互仿真工具对所建立的模型进行触发执行,可以形象直观地看出舰载机在预警机协同下与威胁目标的对抗过程。可以通过在信息令牌的颜色集中添加不同的参数,在变迁的动作函数中设定不同的信息处理规则来研究预警机与舰载机协同防空作战中的实际问题,对不同决策组织的优劣和不同的指挥控制方式的可行性进行研究。
参 考 文 献
[1] 廖旭东,王永春.舰艇编队协同防空任务规划理论及应用[M].北京:国防工业出版社,2013.
[2] 朴成日,沈治河.基于作战协同航母编队兵力配置方法[J].指挥控制与仿真,2013,35(4):32-35.
[3] 徐圣良,姜青山,张培珍.舰机协同防空作战活力运用研究[J]. 舰船科学技术,2010,32(11):113-117.
[4] 朱连章,隋瑞升,孔莹莹.基于CPN Tools的性能评价仿真研究[J].微计算机应用,2008,29(4):78-81.
[5] 吴哲辉.Petri网导论[M].北京:机械工业出版社,2006.
[6] 徐大江.基于着色Petri网的舰艇自防御建模仿真研究[D].北京:中国舰船研究院,2012.
[7] 王宗虎,徐圣良,王焕章,等.舰载航空兵超视距攻击的目标分配优选模型[J].舰船电子工程,2008,28(10):10-13.
中图分类号E911
DOI:10.3969/j.issn.1672-9730.2016.02.001
作者简介:赵秦豫,男,硕士研究生,研究方向:军事智能信息系统。李照顺,男,副教授,研究方向:军事智能信息系统。蓝湾湾,男,硕士研究生,研究方向:信息网络安全。吴琦,女,硕士研究生,研究方向:信息网络安全。
*收稿日期:2015年8月3日,修回日期:2015年9月27日
