独立平行两轴的同步控制系统优化设计
2016-03-02 06:33吴国华
现代制造技术与装备 2016年7期
吴国华
(北京清大天达光电科技股份有限公司,北京 101204)
独立平行两轴的同步控制系统优化设计
吴国华
(北京清大天达光电科技股份有限公司,北京 101204)
本文采用一种新型的全闭环运动控制系统,完成对直线电机高速度、高精度的控制,进而实现两轴高速运动同步控制的功能。实验获得的数据和设备在产线上的实际运行说明,该系统同步性能好,误差率低,具有实时性和快速性,得到了客户的好评。
直线电机 运动控制器 两轴同步控制
引言
本文将现代运动控制系统中的代表性技术——直线伺服控制技术和运动控制器技术相结合,研究出一种高速度、高精度、集控制和管理于一体的柔性、开放性的两轴同步运动控制系统。
1 同步控制原理
在龙门架构系统中,一般采用机械连接结构即机械同步控制方式来控制龙门两侧的伺服电机同步运行。从电气上讲,这两台电机实际各自独立,由PLC或运动控制卡向两台伺服驱动器发送运动指令。本设计中,因为龙门上方还有一个横向运动的电机轴,且该电机轴在纵向位置上不能移动,所以龙门两侧的电机轴不能使用机械硬连接的方式连接起来。在这种情况下,龙门两侧的电机轴要做到同步运行,并且电机运行速度达到1500mm/s以上;位置偏差达到10μm,同步偏差达到5μm,就必须在电气控制方面做出独特的设计。一般情况下,电气上的两轴同步控制采用的是软件实现的主从控制方式。图1所示的是采用伺服驱动装置的数控机床双轴运动同步控制的结构图。
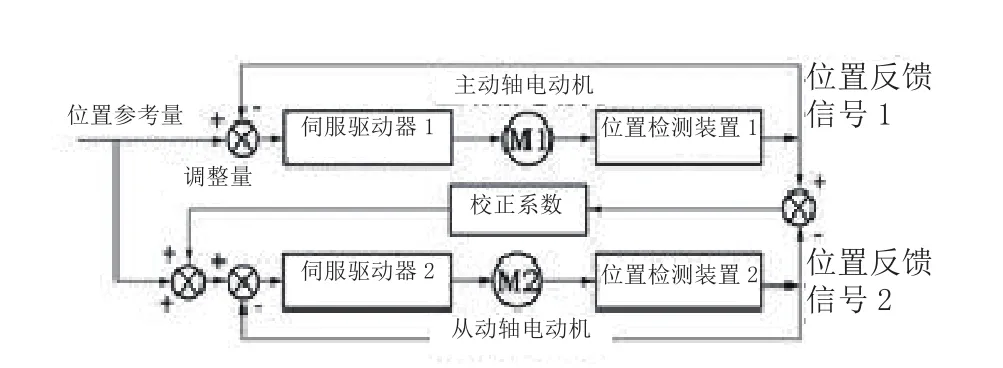
图1 软件主从控制方式
基本工作原理。两个同步运动的电机轴随机设定其中一个电机轴为主动轴,另一个即为从动轴。电机实际运行中,运动控制器将比较从动轴反馈回来的实际位置和主动轴反馈回来的实际位置,然后将此位置偏移修正到从动轴的指令位置。这样经过不断比较、修正,当位置偏移为零时,表明两个轴的位置完全同步。
上面的同步控制方式,能达到的控制精度主要在于补偿量的计算。若补偿准确、及时,则同步性能好,反之则差。而定位精度则主要取决于主轴的定位精度。主轴的定位精度高,同时同步性能好,则从轴的定位精度也不会太差。这两个条件差一个,整台设备的定位精度都很难达到预定要求。因此,本设计中放弃了传统软件实现的两轴同步控制方式,而是采用软硬件配合,全闭环控制,预先设定一个虚拟主轴,龙门两侧的两轴均以虚拟主轴为基准,实时检测,补偿位置偏移,如图2所示。
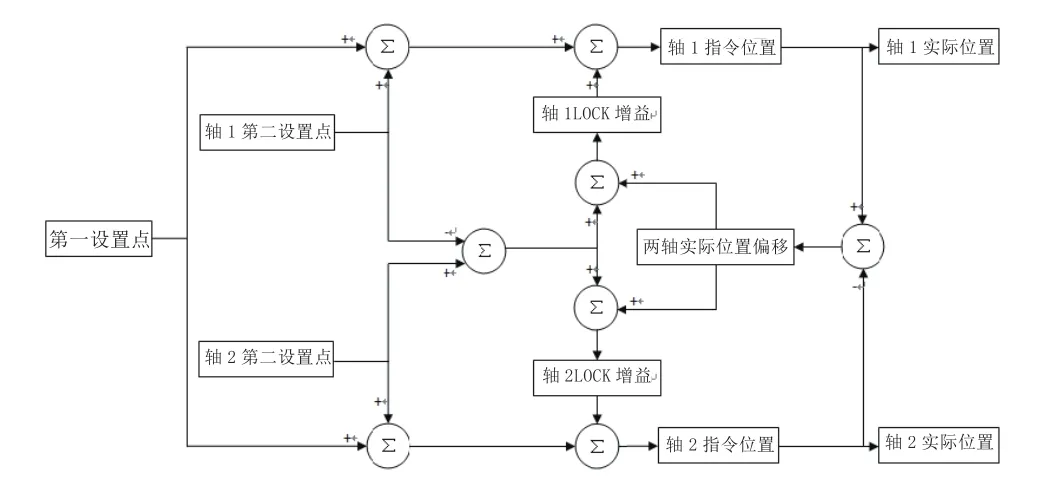
图2 虚拟主从同步控制原理图
工作原理:运动控制器预先设定一个不存在的运动轴,即虚拟主轴,实际存在的两个运动轴为从轴。当控制器软件命令“LOCK X Y”启动后,两轴接收到的指令位置(第一设置点)相同,两个运动轴按照接收到的指令信号运行。但是,电机在实际运行中,因为导轨或电机定子加工和安装的细微差别,两个电机的实际运行位置也会存在差别。运动控制器接收到光栅反馈回来的实际位置后,两轴的反馈位置相减,得到两轴实际位置偏移。把这个实际位置偏移加到指令位置中,形成新的指令位置,通过运动控制器控制回路传送到直线电机,得到电机的实际位置。这样,电机在运行过程中,控制器以其处理器的最高运算频率为基础,反复修正电机的实际位置,以达到运动控制器所能保证的同步性能。
2 硬件设计
本系统采用“PLC+运动控制器”的硬件结构,以自带高速DSP处理器的运动控制器为运动控制系统的核心,PLC触发事件,即“PLC+运动控制器”模式。PLC负责人机交互界面的管理和控制系统的事件触发、实时监控等工作,运动控制器完成运动控制的所有细节。本系统的运动控制器采用的是美国Park汗尼芬公司的ACR9000U1P8M0运动控制器。
该控制器具备以下特性:
(1)每台控制器最多可同时控制8个电机;
(2)具备10/100 Base-T Ethernet功能;
(3)USB 2.0;
(4)兼容Ethernet/IP;
(5)自带CANOpen扩展I/O。
图3所示为本机采用的全闭环两轴同步控制系统。
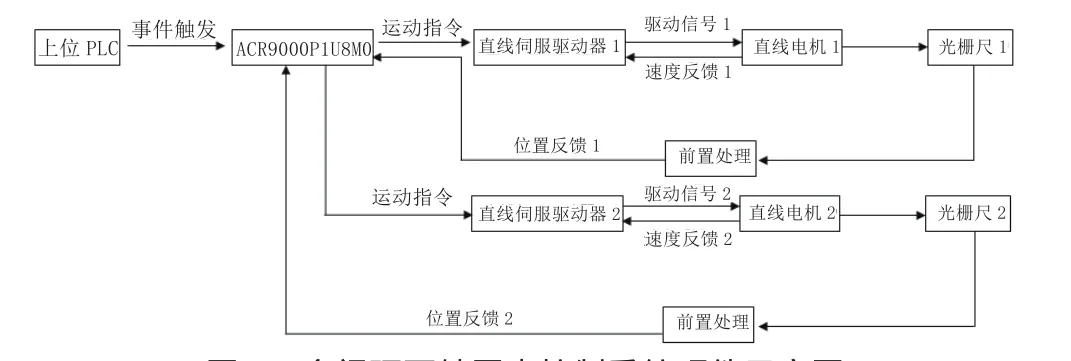
图3 全闭环两轴同步控制系统硬件示意图
该系统的位移检测装置采用的是相对光栅尺,精度为5μm/Pulse。通过光栅尺可以实时检测直线电机的位移信号。此信号经过光栅尺内部放大电路的处理后,得到相位差为90°的两路位移脉冲信号,其频率与直线电机的运动速度成正比,数值为直线电机的实际位移量除以一个脉冲当量。
运动控制器接到上位机的事件触发指令后,向两台直线伺服驱动器发出位移运动信号,经驱动器放大后驱动直线电机,使直线电机按照对应的频率和线位移运行。相对光栅尺的两路位移脉冲信号进入运动控制器构成反馈环。位移脉冲被运动控制器中的可逆计算器进行计数。该计数器中的数值表示直线电机的当前实际位置。运动控制器的作用是根据定位指令值与实际反馈值之差,按控制器设计的控制规律控制整个运动系统的运行,以保证设备的运动平台实际位移,实时跟随定位指令值的变化。
3 软件控制实现
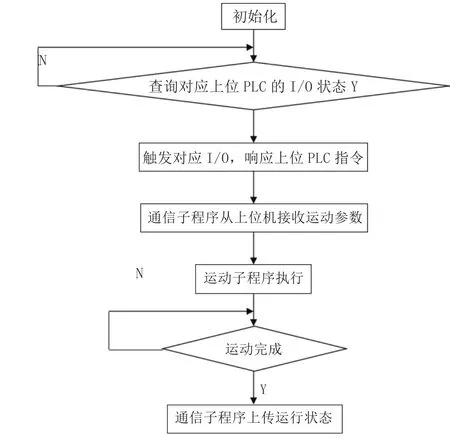
图4 软件程序流程图
运动控制器的软件实现包括运动程序控制和PLC通信两个部分。运动程序完成运动控制器所控制的所有轴的运动,包括单轴以及两轴同步的点动、回零、相对定位等伺服运动。根据上位PLC下发的各种运动参数,运动控制器将自动计算出各轴单动时的加减速时间和匀速运行时间,调整出一个符合设备运转所需的平滑运动曲线,并将此曲线的参数保存。当需要实现两轴同步运行时,触发软件的程序控制命令“Lock Y X”。运动控制器收到该软件指令后,与其对应的硬件回路开始运转,这样就将需要同步的两个单轴锁定在一起。在解锁之前,这两个单轴从程序控制的角度来说就是一个轴,其对应所有的点动、回零和定位运动等,都只要将运动参数赋予X轴即可。同时,因为此控制命令对应的同步方式为虚拟主从同步控制机制,同步轴调试完成后的绝对定位精度可以达到±2Plus,实时同步精度可以达到±1Plus。这些数据在出厂前的试运行和出厂后的客户实际运行中均得到了验证。
运动控制器的PLC通信部分则负责接收从上位PLC下发的“事件触发指令”(I/O触发)和各轴的运动参数。同时,将实际运行时各轴的运行状态上传到上位PLC。这两项是通过PLC和运动控制器之间的Ethernet通信协议完成的。运动控制的程序流程图如图4所示。
4 结束语
以DSP或FPGA芯片为核心处理器的运动控制器,其运动控制功能由硬件电路实现,控制性能和运动精度由核心处理器的运算能力决定。这种运动控制器集成了强大的运算功能、稳定的纠错能力,同时也简化了运动控制的指令编写复杂性。当接到上位PC或PLC下发的事件触发指令时,它就可以独立完成与运动有关的控制,从而简化上位控制设备的程序编写和调试难度。这不仅缩短了新设备的研发周期,还能更好地达到全闭环运动控制,同时也能够满足对高速直线电机的控制要求。将运动控制器应用到两轴同步控制领域,既是两轴同步控制领域的一种新尝试,也为两轴同步控制提供了一种新的选择与创新。
[1]王家军,齐东莲.运动控制系统的发展与展望[J].电气时代,2004,(10):50-52.
[2]舒志兵.运动控制新技术[J].电气时代,2004,(10):54-56.
Optimization Design of Synchronous Control System of Independent Parallel Axes
WU Guohua
(Beijing Tianda photoelectric Polytron Technologies Inc, Beijing 101204)
In this paper, a new full closed loop motion control system, complete control of linear motor with high speed and high precision, so as to realize the high speed movement of the two axis synchronization control function. Experimental data and equipment in the production line of the actual operation shows that this system has good synchronization performance, low error rate, with realtime and fast, get the customer's praise.
linear motor, motion controller, two axis synchronous control
猜你喜欢
工程与试验(2022年2期)2022-08-08
商品与质量(2020年53期)2020-11-27
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
精密制造与自动化(2018年1期)2018-04-12
雷达学报(2017年1期)2017-05-17
制造技术与机床(2017年2期)2017-05-04
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31