多轮电驱动平地机驱动电机转矩控制系统分析
2016-02-24 03:29王双岭陈会鸽
微特电机 2016年12期
王双岭,陈会鸽
(1.中原工学院,郑州 451191;2.黄河科技学院,郑州 450001)
多轮电驱动平地机驱动电机转矩控制系统分析
王双岭1,陈会鸽2
(1.中原工学院,郑州 451191;2.黄河科技学院,郑州 450001)
柴油发电机组提供电源、永磁无刷直流电机独立驱动是目前电动轮车辆采用的结构形式,为了更好地实现整车低速度大扭矩高效运输,制定合理高效驱动电机控制系统显得尤为重要。根据永磁无刷直流电机的结构特点和性能特征,针对牵引电机的不同驱动转矩分配控制进行研究,并搭建系统的数学模型。在ADAMS/View中搭建简化的电动轮多电机驱动六轮平地机虚拟样机模型,并在 Simulink 中搭建简化的转矩控制系统模型,基于以上模型建立整车和控制系统联合仿真分析模型,对不同转矩控制方案在车辆运行中的控制特点进行对比分析。搭建地面台架模拟试验测试系统,对开环控制下,转向过程中,内、外侧轮转速和转矩的变化趋势及其对车辆转向特性的影响进行分析;采用不同的控制方案对前轮转向过程进行分析,以等状态转矩控制车辆复合转向,对比分析各种控制方法的转向控制特性和自适应差速效果,试验分析结果验证控制系统和模型仿真的准确性与可靠性,为此类车辆设计研究提供参考。
多轮电驱动;平地机;转矩控制;永磁无刷直流电机;驱动系统
0 引 言
电传动车辆牵引转矩控制系统是整车控制的核心。对于交-直-交电传动结构的多轮独立驱动车辆而言,牵引转矩控制系统通过对各轮牵引电动机进行单独控制以实现柴电机组动力源负载功率控制,能够充分吸收柴油发电机组输出的功率并转变为输出转矩和转速,因此,选择合适的控制方法对整车的驱动性能产生很大影响[1]。车辆电传动技术具有广泛的应用前景,对比国内外的发展现状可知,国外已处于应用阶段,国内还处于试制阶段,因此,实现对直流电机转矩控制系统的国产化设计,是实现此类车辆完全国产化应用必须解决的问题。
在相关电动汽车控制领域,国外的专家学者对电机驱动控制研究取得了一定的成果:文献[2]研究了适用于多轮独立驱动车辆的动力学分层集成控制方法,上层采用非线性滑模控制器得到整车纵向力、侧向力和横摆力矩;文献[3]研究了一种四轮驱动力的协调控制方法,控制目标是增强车辆稳定性并降低能量消耗;文献[4]针对四轮独立驱动车辆提出了神经网络PID电子差速转速转矩综合控制策略,协调分配四轮毂电机的转矩,实现车辆转向的电子差速控制;文献[5]基于滑模控制理论的驱动防滑控制器应用到极限工况和不同道路条件下的仿真分析中,控制提高了车辆的操纵稳定性;文献[6]以驱动电机转矩响应误差为出发点,提出了整车转矩协调控制方法,改善了车辆直线跑偏情况。
本文基于六轮驱动电传动平地机牵引电机驱动系统设计,该机采用柴油发电机组供电、永磁无刷直流电机独立驱动,对电机转矩控制进行分析,分析了牵引电机的不同驱动转矩分配方法。根据永磁无刷直流电机的结构特点和性能特征,建立其数学模型;在ADAMS/View中建立简化的六轮平地机虚拟样机模型;在Simulink 中建立简化的转矩控制系统模型,并将以上模型联立搭建联合仿真模型。分析不同的转矩控制法在车辆运行中的控制特点。搭建台架模拟试验系统,分析了开环控制时转向过程内、外侧轮转速和转矩的变化趋势及其对车辆转向特性的影响。
1 牵引电机转矩控制系统
电传动车辆牵引转矩控制系统是整车控制的核心。独立电驱动结构的车辆在恒转矩和恒功率控制模式下,各轮驱动转矩可以自由分配,这也是传统机械传动所不具有的优势[7]。基于转矩分配的控制策略主要有:
1)等转矩分配
在恒转矩控制和恒功率控制模式下,等值分配各轮的驱动转矩,能达到传统机械传动方式的转矩分配效果[8]。多用于车辆起步或坏路面控制,提高车辆通过性指标,各轮电机输出转矩按式(1)分配。
(1)
式中:Ti为各轮电机的输出转矩;Ttar∑为整车总驱动转矩;N为车轮个数;Iw为轮边减速比。
2)等功率分配
等值分配各轮电动机的牵引功率。各车轮牵引电动机转矩分配满足式(2)约束条件:
(2)
式中:Pd为电机驱动系统目标驱动功率;Pi为第i轮牵引电机的驱动功率,i=1,2,3,…,N;ηmi为各轮电机驱动系统的工作效率。
3)等状态分配
对于六轮平地机,其摆动式前桥和后桥平衡箱式设计均无悬架结构,本文采用满足工程控制要求的等状态分配控制进行分析。等状态分配方法为动力型控制,可有效提高附着力利用率以及车辆爬坡、急加速作业能力[9]。当铰接转向油缸锁止时,平地机的前后车架视为刚性联接,可将前后车体的两个质心简化为整车一个质心处理,平地机整车受力如图 1所示。因后桥的平衡箱结构,使后四轮(b,c,d和e轮)均衡承载,a,f轮为前轮。
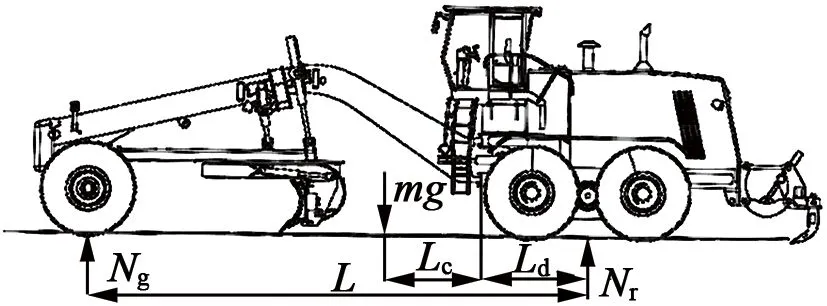
图1 平地机整车受力图
(3)
(4)
式中:m为整车质量;Nq、Nr为前、后桥载荷;Lc为整车质心与铰接点的间距;Ld为铰接点与后轴的间距;L为前、后轴距。
各轮电机的输出转矩按式(5)分配:
(5)
式中:kts为前桥桥荷系数;Tf,Tr为前、后桥车轮电机转矩。
2 基于转矩分配控制联合仿真模型
2.1 永磁无刷直流电动机模型
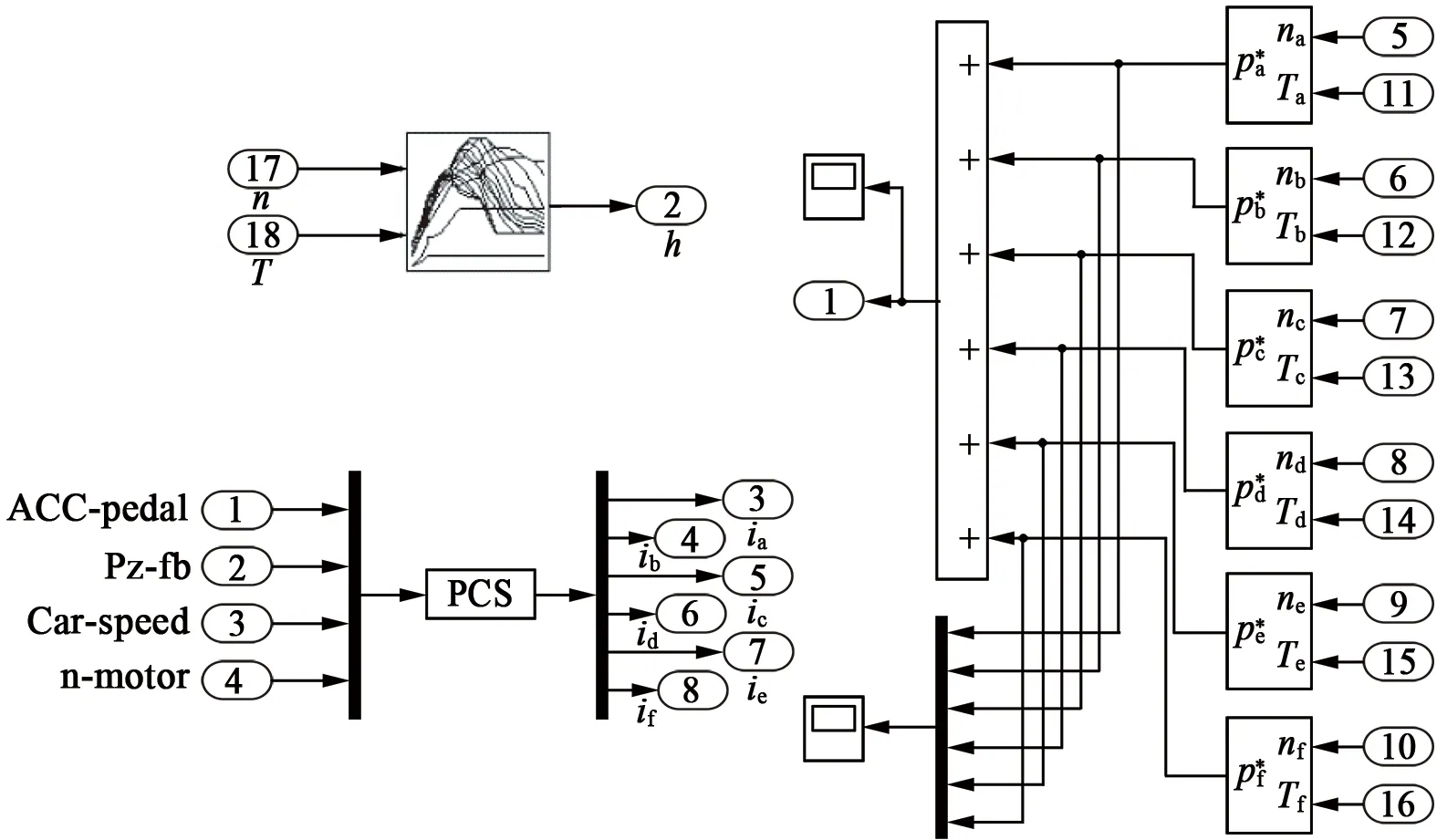
此电机由机体本体、换向电路及转子位置传感器等三部分组成。通过转子位置传感器检测转子的磁极位置[10]。电子换相电路根据位置传感器的输出信号控制功率开关器件的驱动信号,电机的电枢绕组根据给定的导通顺序通电, 产生持续旋转的磁动势,永磁无刷直流电机控制系统图如图2所示。
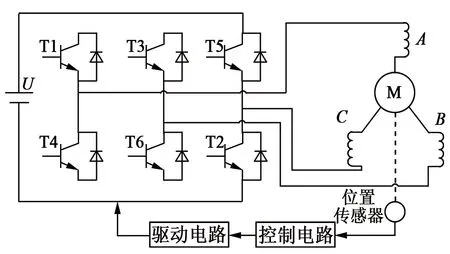
图2 永磁无刷直流电机控制系统图
此处所用无刷直流电动机的三相绕组为 Y 型连接,为合理的简化分析和方便计算,可获得如下定子绕组的电压平衡方程:
(6)
式中:p为微分算子,p=d/dt;uA,uB,uC为三相绕组的相电压;Rs为定子绕组的电阻;iA,iB,iC为定子的相电流;eA,eB,eC为三相绕组的感应电动势;LA,LB,LC为定子各相绕组的自感;LAB,LBA,LAC,LCA,LBC,LCB为每两相绕组之间的互感。
由于电机的结构对称,自感和互感可认为是与转子位置无关的常值,设每相绕组的自感为LS,相间互感为M,可知:
(7)
由于星型连接无中线,故有:
(8)
则,式(6)转化为:
(9)
(10)
当AB两相导通时,电压uAB等于直流电源电压U,则:
(11)
当AB相导通时,有iA=-iB=ia,故:
(12)
式中:e为感应电压差,e=ea-eb。
当电机稳态时,则:
U=2Rsia+e
(13)
由反电动势特性和电枢电流-电磁转矩特性可得, 反电动势Te与转速n成正比,电磁转矩Te与相电流ia成正比。
(14)
式中:Te为电磁转矩;Ce为电动势常数;Cm为转矩常数。式(14)组成了永磁无刷直流电机的数学模型。
2.2 整车虚拟样机模型
在ADAMS中建立简化的15自由度六轮平地机模型。其中,铲刀牵引架与前机架前端通过固定副联接,忽略其转动和摆动功能。前轮转向节与前桥通过旋转副联接;前机架和前桥横梁通过旋转副联接实现摆动[11]。前、后机架以旋转副联接,前、后机架通过添加Motion以铰接点为中心整体转向,用以模拟液压转向功能;摆动梁与后桥以旋转副联接。根据平地机的结构特点,前、后桥均未使用任何弹性元件,采取刚性连接方式,不计元件变形以及各运动副内摩擦力,整车模型如图3所示。
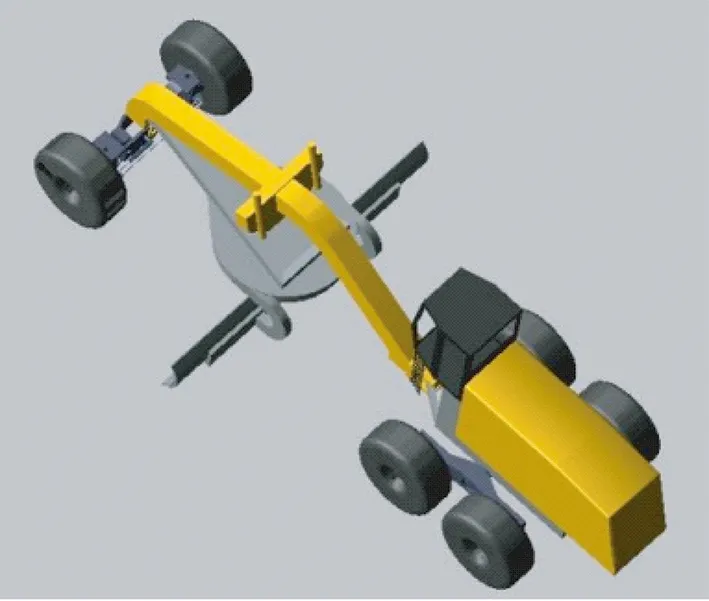
图3 平地机模型
整车主要参数如表1所示。

表1 平地机整车参数
2.3 联合仿真模型
主控制器转矩分配控制模型如图4(a)所示,整车恒转矩控制和恒功控制采用名为PCS的S函数实现,输入参量为加速踏板信号ACC_pedal、反馈功率Pz_fb、车速Car_speed和各电机转速n_motor,函数输出各电机的目标电流指令。
基于Simulink的整车及驱动控制系统联合仿真分析模型如图4(b)所示,在车辆行驶过程中,驾驶员的操控信息转换为动力源与执行单元电机的驱动控制信号,电机模型与整车模型通过路边减速系统实现转矩和转速的控制与反馈,将行车参数实时反馈至整车控制系统模型[12]。
(a)主控制器转矩分配控制模型
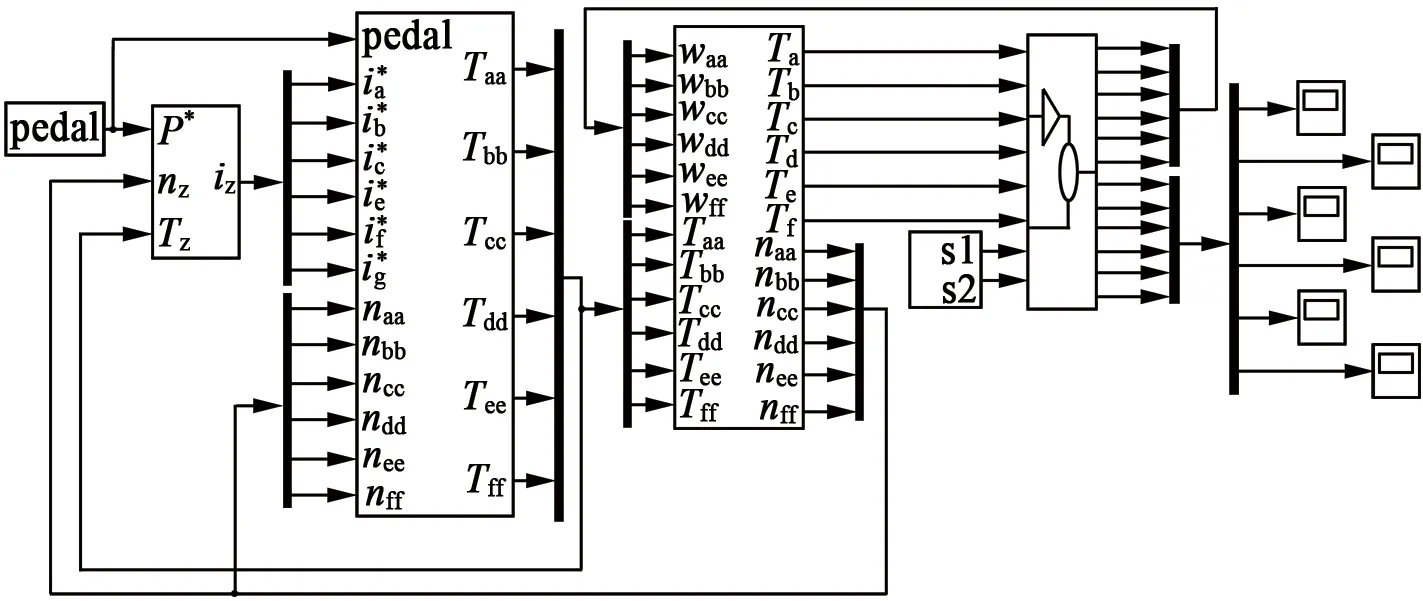
(b)Simulink 联合仿真模型
3 不同工况控制分析
3.1 纵向行驶控制
以六轮平地机为原型,利用搭建的联合仿真平台对多轮独立电驱动车辆进行纵向行驶仿真研究。主要考察车辆在良好水平路面、车轮半径不相等和不平路面工况下,采用不同转矩分配方法直线行驶的运行特性[13]。
(1) 水平路面直线行驶分析
车辆在最高附着系数为0.8的良好路面直线行驶。仿真时,驾驶员加速踏板从零阶跃给定至40%,直行过程只采用等转矩和等状态两种控制方式按照给定的转矩上升斜率进行控制仿真。车辆在水平路面纵向行驶两侧轮状态相近,因此取一侧车轮状态参数进行分析[14]。由图5的电动机转矩曲线可知,牵引电机驱动系统实现了不同分配方式的转矩控制,图5(a)为等状态控制,图5(b)为等转矩控制。

图5 牵引电机转矩曲线
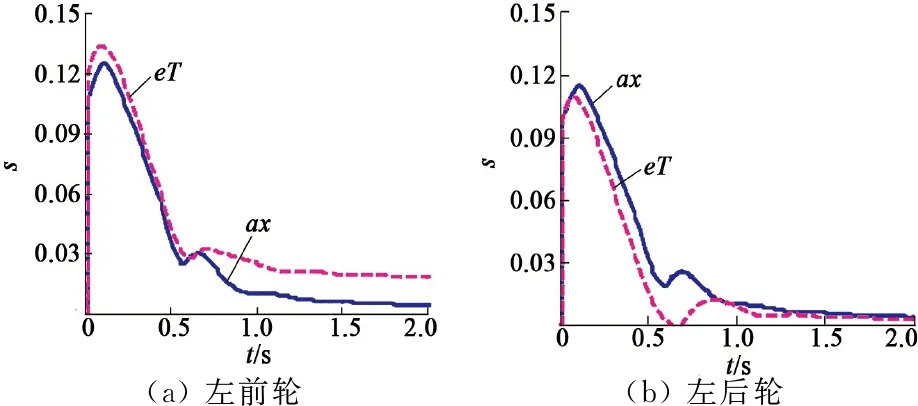
图6 车轮滑转率曲线
由图5和图6的仿真结果可知,电动机驱动系统采用等转矩和等状态两种控制方式都能保证车辆直线行驶时具有良好的驱动性能,等状态控制比等转矩控制的效果更好。
(2) 车轮滚动半径不同的直线行驶分析
假设车辆右侧d,e,f轮由于胎压下降导致滚动半径比额定胎压时减小60 mm,其它车轮滚动半径为额定值980 mm。整车在良好附着路面上以等状态控制直线行驶,分析结果如图7所示。
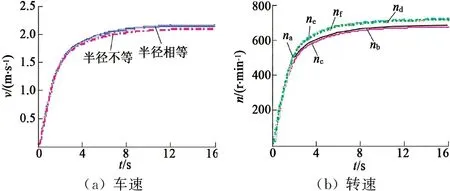
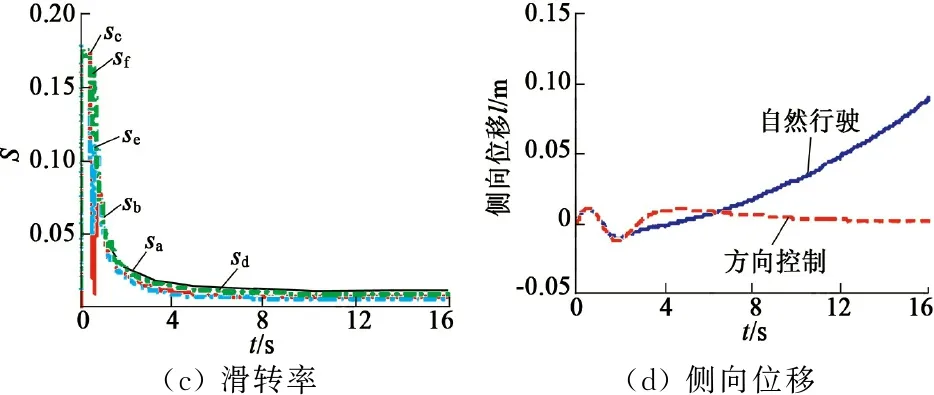
图7 车轮半径不等行驶曲线
从图 7可以看出,车轮滚动半径的减小会导致行驶阻力增大,在给定目标功率条件下的最高车速有所下降。同时,滚动半径小的车轮转速要大于滚动半径大的车轮转速。由车轮滑转率曲线可知,虽然滚动半径小的车轮滑转率增大,但在加速过程中没有出现过度滑转的情况。在匀速行驶阶段,由于两侧驱动电机输出转矩相等,但地面给左右轮的驱动力不等,因此导致两侧轮的滑转率有所不同。
车轮滚动半径不同的仿真证明采用转矩控制能够使车辆实现自适应差速。由车辆侧向位移曲线可知,当两侧驱动轮半径不相等时,驱动轮的运动状态主要由滚动半径和滚动阻力来决定。当半径差异和滚动阻力差别不大时,只要驾驶员进行轻微的转向修正就可以实现直线行驶,出现的跑偏量很小。
(3) 路面不平工况分析
车辆以等状态控制先加速至3 km/h,当左前轮刚驶上障碍时,转速比右前轮低略低;跨越障碍过程中车速降低,左前轮比右前轮的转速下降得少,两侧形成转速差。
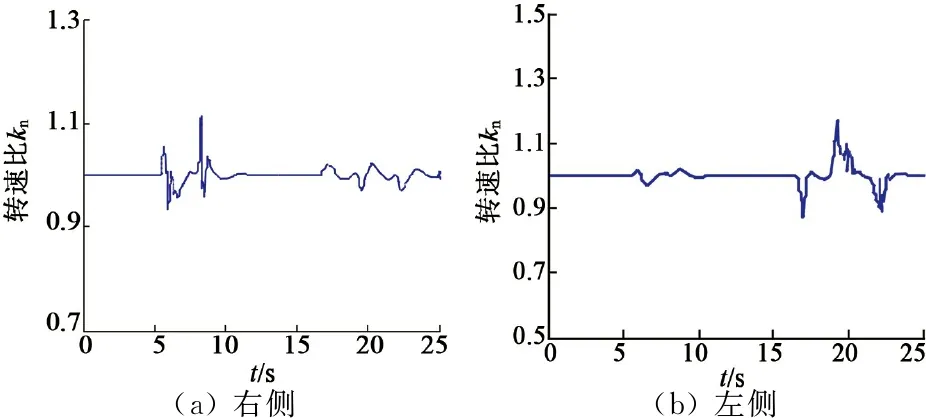
图8 单边障碍路面行驶的两侧轮速比曲线
前轮和后桥后轮的右侧与左侧车轮转速比曲线如图8所示,在此期间后桥车轮转速有微小波动。在摆动桥两轮相继跨越障碍过程中,左后轮转速高于右后轮。整个行驶过程各轮都没有出现过度滑转,仿真表明采用转矩控制较好地实现了车辆行驶于不平路面的自适应差速。
我静悄悄地把信带回家。动过剖腹产手术的内人和摇篮里的儿子都在沉睡。我默默地看着他们,心里说:同志们,买炼乳的钱不愁了。
3.2 转向行驶控制
首先进行前轮转向控制仿真,将车辆加速到7.8 km/h后匀速行驶,在第13 s时输入一个随时间变化的转角左转,到第14 s时达到0.17 rad,分析结果如图9所示。

(a)等转矩控制
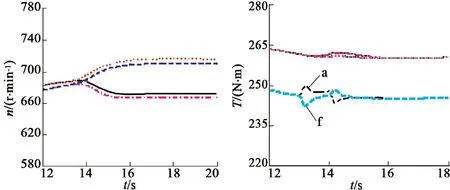
(b)等状态控制
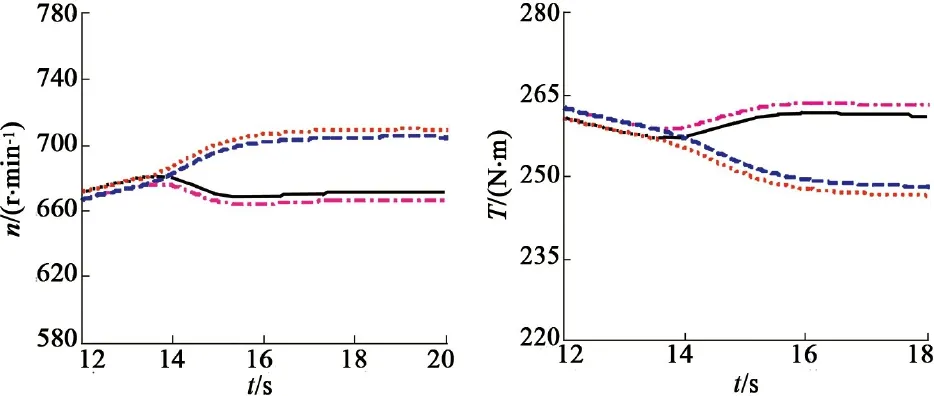
(c)等功率控制
图9 不同控制转向曲线
图 9(a)和图9(b)分别为采用等转矩和等状态控制时后桥电动机转速、转矩曲线。由动态转矩曲线可知,电机转矩从第13.0~13.2s内由于转向机构作用呈增减发散趋势,通过控制系统调节使得各电机在0.3 s内恢复转矩均衡状态。其中,图9(b)添加了两前桥电机的转矩曲线a和f,后桥电机转矩比前桥电机电流的变化幅度小,两种方法均较好地实现了外侧轮转速大于内侧轮的自适应差速。图9(c)为等功率控制时后桥电动机转速、转矩曲线。由于等功率控制时母线功率等比例分配给各轮电机,导致外侧轮转速增大而转矩减小,内侧轮则相反。等功率控制与开环控制类似,其差速效果优于开环控制,但不如等转矩和等状态控制。
4 转向工作特性试验分析
为研究电动轮转向工作特性,搭建了地面台架模拟试验系统,如图10(a)所示。
实验台由一台变频电动机模拟柴油发动机驱动交流同步发电机发电,产生的交流电经三相不控整流器输出直流电,2台4 kW永磁同步直流电动机与电涡流加载器相连,二者之间通过T系列减速机连接,采用直流母线控制实现对两台电机逆变器的控制。试验台将电机的输出转矩作为调控目标,车辆的转向则通过调节电压来实现[15]。
测试时,调节两台电动机的初始工作电压相等,电涡流加载器以恒定电流提供负载转矩TL。此时两台电动机的转速和转矩大致相等,模拟直行工况下两侧牵引电动机的工作状态[16-17]。安装有NJ扭矩测量仪的电机为M1(模拟外侧轮电动机),保持M1的工作电压不变,升高M2工作电压(模拟转向时外侧车轮转速升高工况),试验原理如图10(b)所示。

(a) 实验台
(b) 电动机机械特性曲线
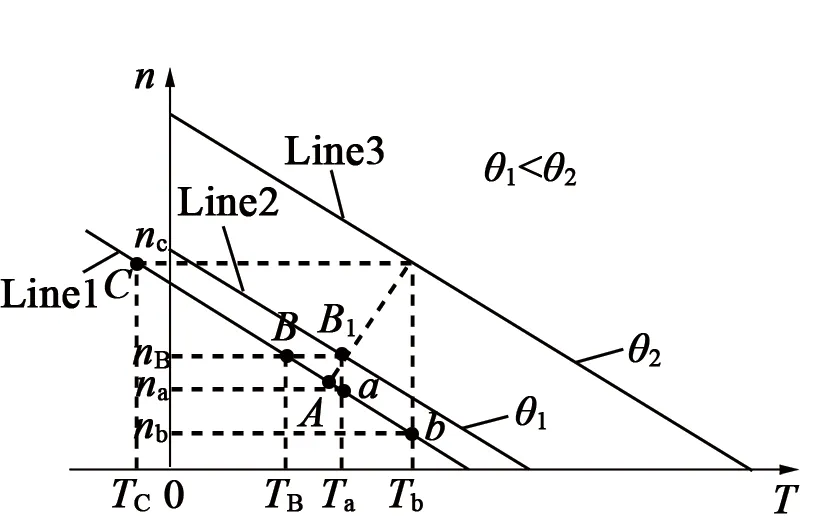
图10(b)中,电压为U1时, M1和M2机械特性曲线为Line1,当电压升至U2时,Line1变成Line2。由于M1和M2同轴,则M1转速被拖至nB,而转矩减至TB,稳定于点B;M2此时在B1点,转矩增至Ta。试验反映了转向时内、外侧轮电动机的转矩和转速的变化趋势:内侧轮转速降低,转矩增大;而外侧则相反。为试验结果数据如表2所示。
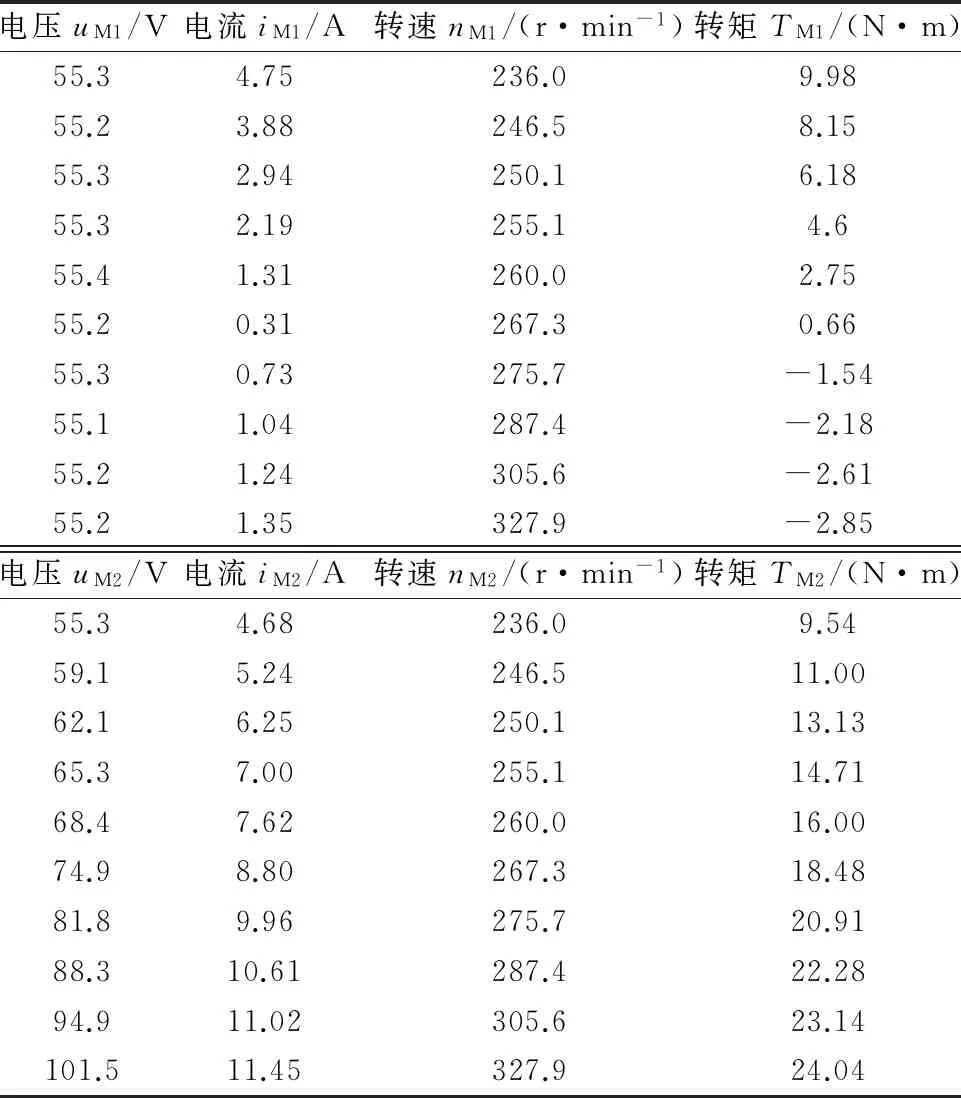
表2 电动机M1和电动机M2试验测试结果
试验结果表明:开环控制时外侧轮转速被拖高时输出转矩减小,内侧轮转速下降时转矩增大。当转向角度(模拟工作电压差)较大时,外侧轮电动机会被反拖产生制动转矩,反馈通过直流母线影响其他电机,负荷越大越难出现拖转发电工况。这种趋势将增大内侧轮的滑转率,加剧车轮的磨损,还可能导致短时过载。而且外侧轮转矩的减小将不利于转速的提高,影响转向特性。
图11为模拟大角度转向时内、外侧轮电动机转矩-电流曲线。a点和c点分别为内、外轮转向前的稳态点,此时可知:Ta=Tc=10 N·m,Ia=Ic=4.1 A。实现转向后,可知U2增大,而M1的输出转矩随转速升高而减小,而与之对应的转矩由正转负则表明电机被反拖进入发电状态,而输出制动转矩。其电流呈先减小后增大的趋势,转矩稳态点由c移至d点;内侧轮M2转矩则持续增大,由于实际开环控制时其电压也为U1,转速将沿着机械特性曲线下降,转矩稳态点由a移至b点。当升高外侧轮电机M1电压达到转矩均衡后,两电机电流(转矩)恢复至均衡位置(即a、c点),实际工况下内、外轮在转向机构作用下出现速差。

图11 电动机转矩-电流曲线
5 结 语
基于转矩控制对永磁无刷直流电机驱动系统进行分析,对等转矩分配、等功率分配、等状态分配等牵引转矩控制策略进行对比分析,建立永磁式无刷电机的数学模型,搭建了15 自由度电驱动六轮平地机模型,基于以上模型搭建联合仿真平台,对多轮电机独立驱动车辆牵引电机控制系统进行分析。搭建地面台架模拟试验系统,研究了同轴牵引电动机的转向工作特性。分析了开环控制时转向过程内、外侧轮转速和转矩的变化趋势及其对车辆转向特性的影响。同时,采用不同控制方法进行前轮转向,复合转向等,对比分析了各种控制方法的转向控制特性和自适应差速效果。
分析结果可知:在水平良好路面纵向行驶时,等状态控制能将各轮滑转率控制在较低水平,有效提高了附着力的利用率;当车轮滚动半径有差异时,滚动半径较小的车轮驱动力更大,转速比滚动半径大的车轮高;当车辆在不平路面行驶时,两侧车轮形成转速差,两种工况均通过等状态转矩控制实现了自适应差速。
[1]GUTIRREZJ,APOSTOLOPOULOSD,GORDILLOJL.Numericalcomparisonofsteeringgeometriesforroboticvehiclesbymodelingpositioningerror[J].AutonomousRobots,2007,23(2):147-159.
[2]COLYERRE,ECONOMOUJT.Comparisonofsteeringgeometriesformulti-wheeledvehiclesbymodellingandsimulation[C]//Proceedingsofthe47thIEEEConferenceonDecisionandControl.IEEE,2008:3131-3133.
[3]GUTIRREZJ,APOSTOLOPOULOSD,GORDILLOJL.Astatus
quaestionisonrecentdebatesonthechronologyandthedatingmethodologyofaugustine’ssermonesadpopulum[M].Latomus,2012.
[4]GANZERJ.Theindividualintheafterlife:theologicalandsociopoliticalconcernsinkingalfred'stranslationofaugustine'ssoliloquies[J].StudiaNeophilologica,2011,83(1):21-40.
[5]GOLESTANK,SATTARF,KARRAYF,etal.LocalizationinvehicularadhocnetworksusingdatafusionandV2Vcommunication[J].ComputerCommunications,2015,71(1):61-72.
[6]HADDOUNA,BENBOUZIDMEH,DIALLOD,etal.Modeling,analysis,andneuralnetworkcontrolofanevelectricaldifferential[J].IEEETransactionsonIndustrialElectronics,2008,55(6):2286-2294.
[7] 钟恒,陈树新.六轮电驱动铰接车行驶状态功率流试验[J].农业机械学报,2012,43(6):8-14.
[8] 刘振军,赵江灵,秦大同,等.混合动力汽车由纯电动工况起动发动机特性研究[J].机械设计与制造,2013(12):101-104.
[9]SRIMATHVEERAVALLIG,KESAVADAST,LiXinyan.Designandfabricationofaroboticmechanismforremotesteeringandpositioningofinterventionaldevices[J].InternationalJournalofMedicalRobotics&ComputerAssistedSurgery,2010,6(2):160-170.
[10] 庄杰,杜爱民,许科.ISG型混合动力汽车发动机启动过程分析[J].汽车工程,2008,30(4):305-308.
[11] 杜常清,颜伏伍,李劲松,等.发动机性能测试及扭矩控制原型建立方法研究[J].内燃机工程,2010,31(1):60-64.
[12]LUFan,CHENSizhong,ZENGYu.Modelingandsimulationoffourdegree-of-freedomfour-wheel-steeringvehicle[C]//WaseInternationalConferenceonInformationEngineering.IEEEComputerSociety,2010:104-108.
[13] 黄家才,张玎橙,施昕昕.基于复合积分滑模的永磁同步电机硬件在环位置控制[J].电机与控制学报,2014,18(12):108-114.
[14]VANTSEVICHVV,GRAYJP,MURPHYD.Fuseddynamicsofunmannedgroundvehiclesystems[J].SAEInternationalJournalofCommercialVehicles,2014,7(2):406-413.
[15] 李伯全,田洪胜,王瑞,等.基于FPGA的EMB力矩电机控制器设计[J].机械设计与制造,2010(7):9-11.
[16] 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
[17] 卞永明,蒋佳.混合动力装载机轮边电力驱动弱磁控制策略[J].中国工程机械学报,2014,12(6):492-496.
Torque Control System Analysis of Drive DC Motors in Multi-Wheel Electric Drive Grader
WANGShuang-ling1,CHENHui-ge2
(1.Zhongyuan University of Technology,Zhengzhou 451191,China;2.Huanghe Science and Technology College,Zhengzhou 450001,China)
The diesel generators to provide power and permanent magnet brushless DC motor independent drive is currently used in the structure of electric drive wheel vehicle. In order to achieve low speed and high torque in transport, the formulated reasonable and efficient driving motor control system is particularly important. According to the structural characteristics and performance characteristics of permanent magnet brushless DC motor, to the different driving torque distribution of traction motor control research, the mathematical model of the system was built. The virtual prototype model of the simplified electric wheel motor was built based on ADAMS/View, and the simplified model of the torque control system was built based on Simulink. Based on the above model, the integrated simulation analysis model of the vehicle and the control system was established. The control characteristics of different torque control method in vehicle operation were analyzed. The ground test bench simulation test system was built to analyze the changing trend of the rotation speed and torque of the steering wheel and the effect on the steering characteristics of the vehicle. The steering process of the front wheel was analyzed by using different control methods. The steering control and adaptive differential effect of various control methods were compared. The accuracy of the control system and the model simulation are verified by the experimental results, which provide reference for the design and research of this kind of vehicle.
multi-wheel electric drive; grader; torque control; permanent magnet brushless DC motors; drive system
2016-05-21
国家自然科学基金项目(61305080);河南省教育厅自然科学基金项目(2013B610013)
袁骏(1990-),男,硕士,主要研究方向为多电机控制、参数辨识。
TM33;TM351
A
1004-7018(2016)12-0081-06
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
发明与创新·中学生(2016年7期)2016-05-14
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01