机电一体化灵巧舵机控制器设计
2016-02-24 03:29李红燕朱纪洪和卫星
微特电机 2016年12期
李红燕,和 阳,朱纪洪,和卫星
(1.江苏大学,镇江 212013;2.清华大学,北京 100084)
机电一体化灵巧舵机控制器设计
李红燕1,和 阳2,朱纪洪2,和卫星1
(1.江苏大学,镇江 212013;2.清华大学,北京 100084)
随着飞行控制系统多电/全电化的发展,电动伺服系统要求具有结构紧凑、可靠性高等特点。设计了一种一体化、高可靠的电动舵机控制器,主控单元采用DSP+CPLD为核心控制架构,逆变驱动采用集成全桥芯片实现。通过设计过流保护、故障自检等机制增强了系统可靠性。通过对主电源设计两级共模、差模滤波,主控信号数字隔离,提高了系统的抗干扰能力。试验结果表明所设计的电动舵机控制器具有结构紧凑、工作可靠的特点。
电动舵机;集成全桥驱动;一体化;高可靠性
0 引 言
电动舵机是飞行控制系统的关键组成部分,其性能的优劣直接决定飞行器的飞行品质[1]。随着功率电传技术的快速发展,要求电动舵机系统具有更紧凑的体积结构、更高的可靠性[2]。国内外对电动舵机的小型化、机电一体化、高可靠性等方面进行了大量研究[3-6]。以色列的Viper导弹以及美国的JASSM航空智能炸弹采用了由直流伺服电机和谐波减速传动装置构成的小型电动舵机。美国雷声-休斯飞机制造有限公司对其生产的AIM-120空空导弹上使用的无刷直流伺服电机的可靠性进行了深入研究试验[7]。此外,美国的波音公司、法国的空客公司也在致力于电动舵机一体化和可靠性的研究[8-9]。国内,许多单位、高校在电动舵机的可靠性研究方面取得了创新性进展。航天十八所、航天三十三所、航天八零三所等单位开展了基于无刷直流电机的小型作动系统研究。清华大学、南京航空航天大学、西北工业大学等高校在舵机本体可靠性设计、舵机多余度控制器设计等方面进行了深入研究[10-11]。本文设计了一种高可靠灵巧的电动舵机控制器,采用集成驱动芯片减小了控制器的体积,设计了电源滤波、信号隔离、过流保护等电路提高了系统的可靠性。
1 系统设计方案
电动舵机执行机构主要由三相无刷直流电机、减速器、旋转变压器组成。减速器选用了体积小、重量轻的谐波减速器,其具有高传动精度、高功率密度、高扭转刚度和零背隙的特点,使得舵机执行机构更加紧凑,传动效率更高。旋转变压器安装在减速器输出端,直接测量舵机摇臂的转速和位置。设计要求舵机额定输出扭矩为2.6 N·m,最大输出扭矩为5.8 N·m。工作行程0°~30°。空载运行时,带宽6 Hz,间隙<0.1°。
针对上述控制对象,控制器采用DSP+CPLD为核心控制架构,通过RS-422通信总线接收主控设备发送的给定位置指令,同时反馈舵机当前工作状态。DSP根据上位机的给定信号和传感器反馈信号,产生相应的PWM波,经过CPLD进行逻辑扩展,输出实际所需数量的控制信号。转化后的控制信号经过隔离电路处理后输出给集成驱动芯片,驱动电机绕组导通。电机输出轴连接减速器带动摇臂向指定位置转动。舵机位置信号和电机电枢电流分别由旋转变压器和霍尔电流传感器获得。其中,旋变解调芯片解算出摇臂当前位置、速度信号通过SPI端口传送给控制器。霍尔电流传感器检测出逆变器漏电流,一路输入驱动芯片做过流保护,一路经滤波、A/D采样输入DSP做闭环控制。系统总体设计框图如图1所示。
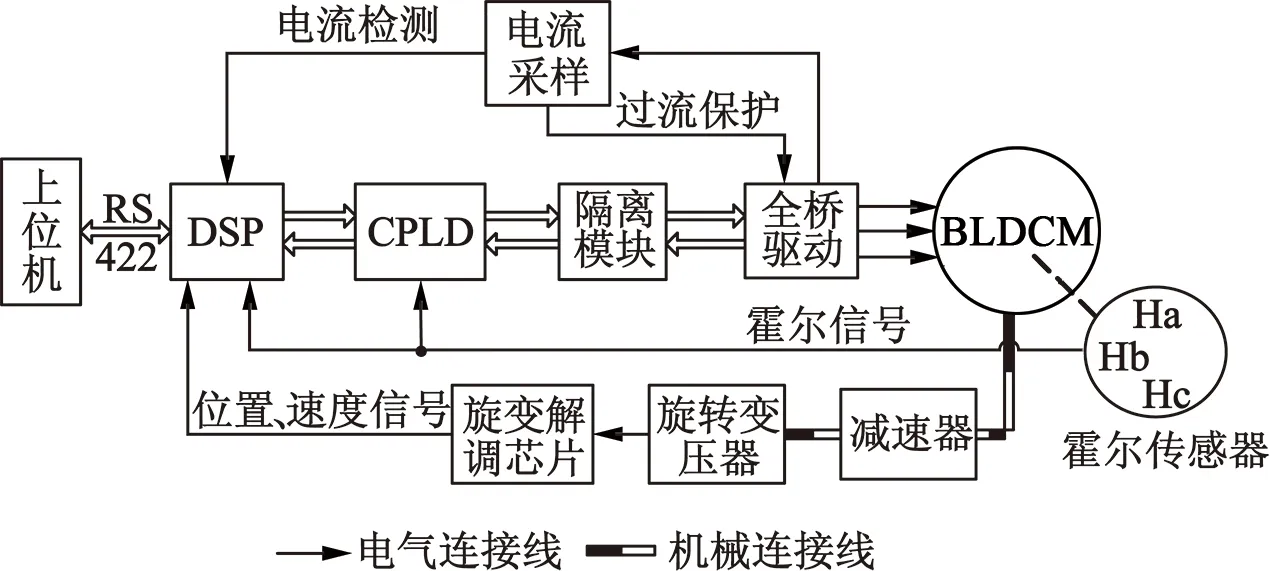
图1 系统总体设计框图
本文设计的舵机控制器实物如图2所示,控制器各个模块借助定位孔、铜柱、螺丝等固定在舵机上,协调各个电路板的安装,实现了机电一体化设计。其体积尺寸为108 mm×34 mm×50 mm。
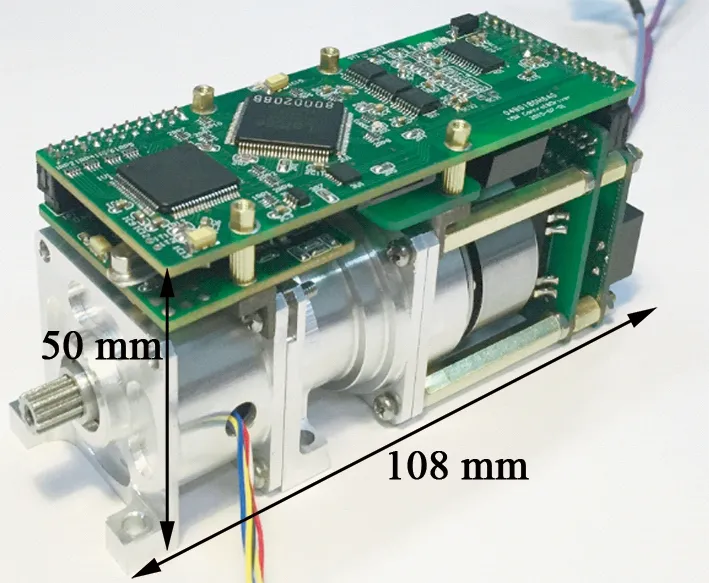
图2 舵机控制器实物图
2 控制电路
控制电路主要由主控单元和电源电路组成。
2.1 主控单元
DSP采用TMS320F28069,主要完成串口通信、电流采样换算、速度读取、闭环控制、PWM输出等任务。它是一种专门用于电机控制的数字控制器,具有供电简单、功耗低、支持浮点运算、响应速度快等特点。
CPLD采用LC4128V-75TN100I,主要完成逻辑扩展、电机实际转速方向解算、摇臂行程保护限制、过流保护等任务。CPLD内部组合逻辑的合理应用简化了外围电路的设计,减轻了DSP的工作量,提高了系统的工作效率。
2.2 电源电路设计
系统供电电压+28 V,采用电源适配器供电。在电源模块前端加入共模扼流圈,共模噪声干扰主要由下图3中7L1,7L2和电容7C3,7C4,7C7,7C8构成的对地对称的 型滤波器滤除。在共模扼流圈后级串联2个差模滤波器,构成差模增强型滤波电路,滤除差模噪声。设计中,必须使共模滤波电路和差模滤波电路的谐振频率明显低于开关电源的工作频率,一般要低于10 kHz,所以7L1,7L2取47 μH;7C3,7C4,7C7,7C8取6.8 μF;7L3,7L4,7L5,7L6取33 μH;7C9,7C10,7C11,7C12取10 μF。共模、差模滤波器的共同作用,提高了控制器的电磁兼容特性。

图3 28 V滤波电路图
系统供电电压为+28 V,需要设计电平转换电路实现片上数字电源供电。
本设计选用的DC/DC隔离电源模块输入电压18~36 V,输出电压5 V。该芯片体积小,效率高,且具有短路保护(自恢复)等功能。电路设计如图4所示,输入输出端加入不同数值的钽电容和电感,可消除不同频段的高次谐波,提高电源质量。输入输出地之间加入电容7C18(1nF/2kV)防止静电击穿,保护电路。
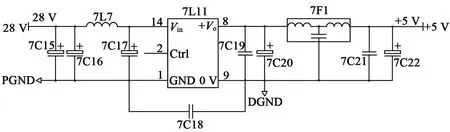
图4 28 V转5 V电路图
DSP,CPLD等需要3.3 V电源供电,TPS73733是一种5 V转3.3 V的低压差线性恒压电源芯片。芯片集成度高,内部自带反向电流保护、过温保护等功能。驱动能力强,最大输出电流可达1 A。电路设计如图5所示,输入端设计了发光二极管用来指示电源是否正常。输出端设计了三端滤波器ACH4518、钽电容和瓷片电容实现了电源滤波,提高了电源品质。

图5 5V转3.3V电路图
3 驱动电路
驱动电路主要由信号隔离电路、驱动芯片电路及电流保护电路组成。
3.1 信号隔离电路
为了提高控制器抗干扰能力,增强系统可靠性,对3路PWM波、3路EN及故障诊断等信号设计了数字隔离。隔离器采用小尺寸封装且低功耗的四通道数字隔离器。每个隔离通道都有一个由二氧化硅(SiO2)绝缘隔栅分开的逻辑输入和输出缓冲器,可防止数据总线或者其它电路上的噪声电流进入本地接地或者干扰或者损坏敏感电路。数字隔离芯片应用电路如图6所示,在默认状态下,输出使能为低,芯片输出为高阻态,可以防止上电复位或控制器故障时逆变器共态导通,损坏驱动芯片。在隔离芯片输出端设计下拉电阻,且信号输入输出端都设计了RC滤波电路提高系统抗干扰能力。
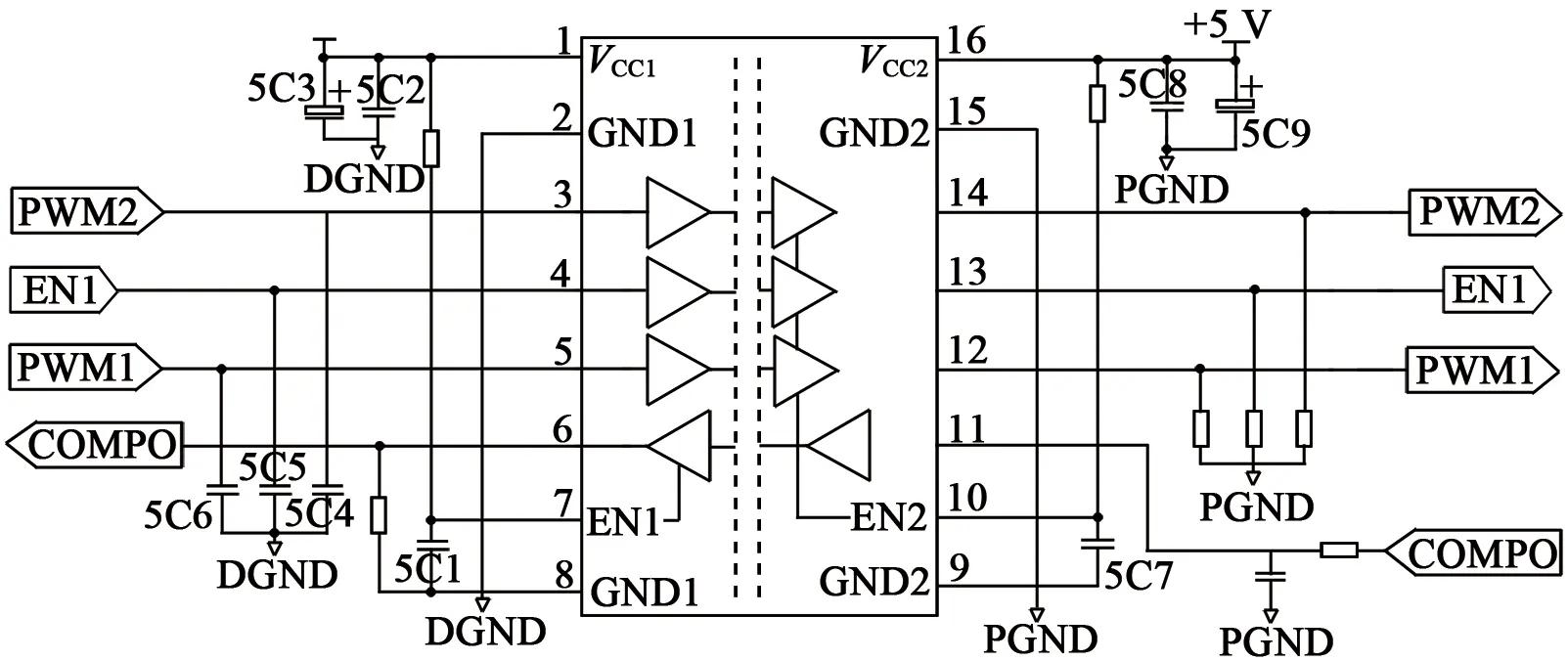
图6 数字隔离芯片电路图
3.2 驱动芯片电路
本设计采用的驱动器DRV8313,其内部集成3个可独立控制的半H桥和1个通用比较器,简化了驱动电路设计,并可实现电流保护,提高了系统的可靠性;内置的3.3 V/10 mA低压降(LDO)稳压器,给电流传感器供电,简化了电源转换电路。芯片尺寸为9.8 mm×6.6 mm×1.2 mm,有利于实现小型化设计。芯片输入电压范围8~60 V,工作时最大功耗为0.06 W。在25°C,24 V时,每个半H桥的通道上可提供高达2.5 A峰值电流或者1.75 A均方根输出电流。采用该集成芯片作为逆变驱动,减小了控制器体积;自身具有短路、过温、欠压闭锁等故障自检机制,提高了系统的可靠性。
DRV8313驱动芯片应用电路如图7所示。利用驱动芯片内置通用比较器,设计了过流保护电路如图8所示。图8中,驱动芯片采用28 V供电方式。PWM[1~3],EN[1~3]为CPLD逻辑处理后经过隔离芯片输出的3路PWM波和3路使能信号。电阻4R11,4R12分压,设置阈值电压2.30 V输入比较器的COMPN脚。图8中,霍尔电流传感器将所测量的电机逆变器漏电流信号输出至比较器的COMPP脚。 为过流保护信号输出, 为故障报警信号输出。当过流故障发生, 被置低,发光二极管4D1被点亮。当驱动芯片内部故障发生, 被置低,发光二极管4D2被点亮。过流或驱动芯片内部故障发生,CPLD将关断所有控制信号的输出,实时保护系统的正常工作。
4 反馈检验电路
反馈检测电路主要由电流检测电路,转速、位置检测电路组成。
4.1 电流检测电路
为了实现电流闭环控制和过流保护,需进行电流检测。考虑到电机驱动电流大小、输出电压范围及工作温度等因素,选用霍尔电流传感器ACS722,电路原理如图8所示。其工作电压为3.3 V,有效检测电流范围为-5~+5 A,分辨率为264 mV/A。ACS722输出电压范围为0.33~2.97 V,可以直接滤波后输入TMS320F28069的ADCIN引脚完成电流解算和闭环控制。ACS722输入电流与输出电压的对应线性关系可以表示:
Vout=0.264Ip+1.65
(1)
式中:Vout为输出电压;Ip为输入电流。
4.2 转速、位置检测电路
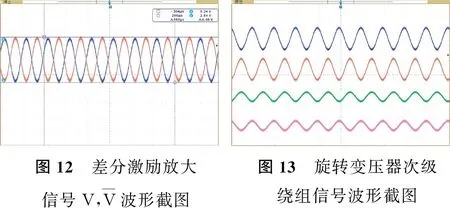
为了实现转速、位置闭环控制,需实时检测转速、角度信号。旋转变压器是一种可以同时检测到舵机当前转速与角度的传感器,具有结构稳定、精度高、环境耐受力强等优势[12]。本系统选用的旋转变压器,励磁绕组输入的差分激励信号频率要求为10 kHz,峰值为9.9V。输出绕组的电压幅值为Vs×sinωt×sinθ和Vs×sinωt×cosθ,其中,Vs为转子激励幅值,θ为转子角度。
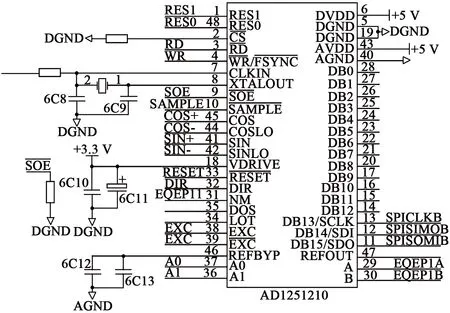
图9 旋变解调芯片AD2S1210

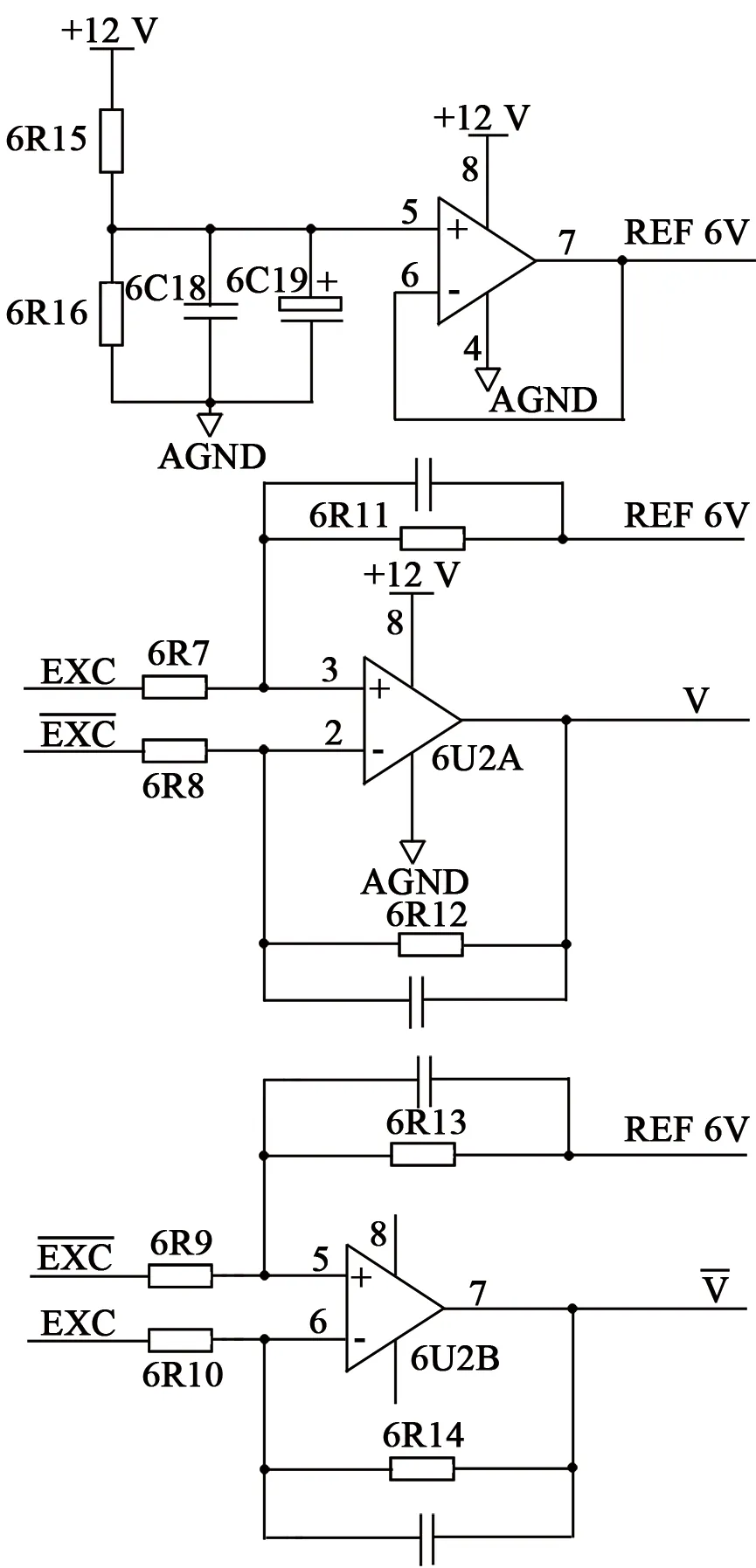
图10 差分激励信号放大电路
(2)
(3)
5 实验结果与分析
本系统采用的无刷直流电机主要参数:额定电压24 V、额定功率15 W、额定转速2 760 r/min、传动机构减速比100:1。

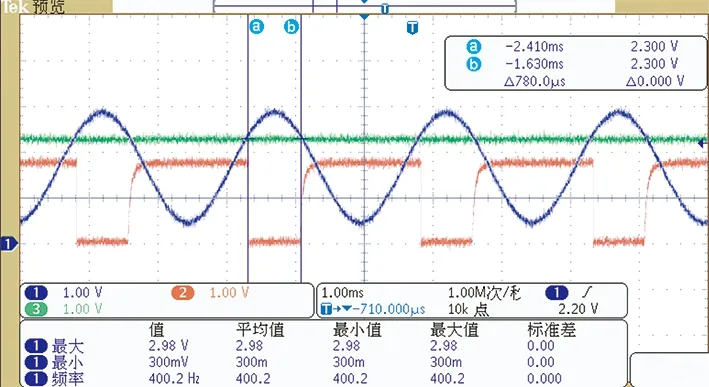
图11 电流保护信号测试波形截图
通过对主电源设计两级共模、差模滤波电路,提高了控制器的电磁兼容特性。在信号线上加入多个旁路、去耦电容,提高了系统的抗干扰能力。在带额定负载的情况下对驱动器进行了EMC测试,依据的标准是GB4343、GB9254。图14是0.15~30 MHz频段的测试结果,横坐标表示频率(单位MHz),纵坐标表示EMC信号准峰值(单位dBμV)。图中上部分为EMC标准中规定的各频段标准准峰值界限;图中下部分为测量的驱动器上的各频段的EMC信号最大准峰值。测试结果表明,在频率为24.208 35 MHz时,EMC信号最大准峰值为48.603(dBμV),未超出标准准峰值界限。
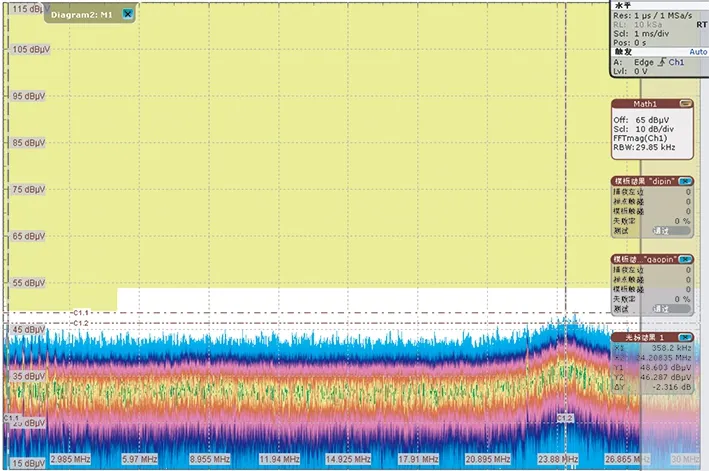
图14 驱动器EMC测试结果截图
实验对舵机的控制性能进行了测试。舵机工作行程为0°~30°,图16是位置给定1°的阶跃响应图,横坐标为时间(单位s),纵坐标为舵机位置(单位°)。从图中可知初始位置为4°,给定位置为5°,反馈位置为4.999°,超调量极小,稳态误差0.001°。调节时间为0.09 s,响应速度快。动态特性实验表明该控制器满足系统的动态响应要求。
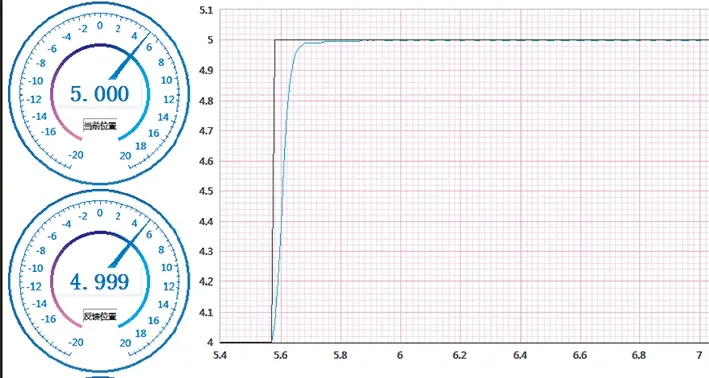
图15 舵机空载时的位置阶跃响应截图
6 结 语
本文设计的高可靠灵巧电动舵机控制器采用DSP和CPLD作为核心控制器,提高了系统的工作效率;采用集成3个半H桥的DRV8313作为驱动器,简化了电路设计的复杂度;对主电源设计两级共模、差模滤波,主控信号数字隔离,提高了系统的抗干扰能力;设计过流保护、故障自检等机制增强了系统可靠性;各种集成芯片的使用实现了控制器的小型化。试验结果表明该电动舵机系统结构灵巧、紧凑;工作稳定、可靠;满足各项性能指标。
[1] 赵志刚,林辉,张庆超,等.电动舵机伺服控制器的设计与研究[J].微特电机,2013,41(9):44-46.
[2] HE Yang,ZHU Jihong,YUAN Xiaming,et al.Research on high-reliable dual-redundancy electro-mechanical actuator controller[C]//Proceeding of the 11th World Congress on Intelligent Control and Automation,Shenyang,China.IEEE,2014:2848-2853.
[3] 龚春雨,施进浩.无刷直流电动机的发展现状和质量特点[J].微特电机,2006,34(8):38-43.
[4] 赵文祥,程明,朱孝勇,等.驱动用微特电机及其控制系统的可靠性技术研究综述[J].电工技术学报,2007,22(4):38-46.
[5] BENNETT J W,MECROW B C,ATKINSON D J,et al.Safety-critical design of electromechanical actuation systems in commercial aircraft[J].IET Eletric Power Applications,2011,5(1):37-47.
[6] CAO Wenping,MECROW B C,ATKINSON G J,et al.Overview of electric motor technologies used for more electric aircraft (MEA)[J].IEEE Transactions on Industrial Electronics,2012,59(9):3523-3531.
[7] CROWDER R M.Electrically Powered actuation for civil aircraft[C]//IEE Colloquium on Actuator Technology:Current Practice and New Developments.IET,1996:1-3.
[8] BOGLIETTI A,CAVAGNINO A,TENCONI A,et al.The safety critical electric machines and drives in the more electric aircraft:A survey[C]//35th Annual Conference of IEEE Industrial Electronics (IECON 2009).IEEE,2009:2587-2594.
[9] GARCIA A,CUSIDO J,ROSERO J A,et al.Reliable electro-mechanical actuators in aircraft[J].IEEE Aerospace Electronic Systems Magazine,2008,23(8):19-25.
[10] 汪军林, 解付强, 刘玉浩.导弹电动舵机的研究现状及发展趋势[J].控制与制导,2008(3):42-46.
[11] 李世民,王新平.电动舵机控制系统设计[J].机械与电子,2011(11):60-63.
[12] 王壮,赵文祥,吉敬华,等.旋转变压器处理电路的比较分析与实验研究[J].微电机,2015,48(1):59-63.
作者简介:李红燕(1990- ),女,硕士研究生,研究方向为检测技术与自动化装置。
Design of High Integration Smart Electro-Mechanical Actuator Controller
LIHong-yan1,HEYang2,ZHUJi-hong2,HEWei-xing1
(1.Jiangsu University,Zhenjiang 212013;2.Tsinghua University,Beijing 100084, China)
With the development of more-/all-electric flight control system, compact structure and high reliability are required for actuation systems. A high-reliable electromechanical actuator controller with integrated structure was introduced. In this control system, DSP and CPLD were adopted as the core architecture while integrated full-bridge chip was implemented as the inverter structure. Mechanisms such as over-current protection and internal shutdown for self-check were designed to enhance the system reliability. Two-stage of common mode, differential mode filter of the main power supply and digital isolation of main control signals were designed to improve the anti-interference ability of the system. Experimental results show that the designed controller of electro-mechanical actuator has compact structure and reliability.
electric actuator; full-bridge driver; integration; high reliability
2016-01-27
国家自然科学基金项目(60974142)
郑彬(1991-),男,硕士。
TM383.4
A
1004-7018(2016)12-0072-05
猜你喜欢
小读者(2021年2期)2021-03-29
自动化学报(2019年6期)2019-07-23
汽车观察(2018年10期)2018-11-06
电子制作(2018年1期)2018-04-04
车迷(2017年10期)2018-01-18
北京汽车(2017年3期)2017-10-14
制造业自动化(2017年2期)2017-03-20
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23