无刷双馈电机直接转矩控制研究
2016-02-24 03:29张岳
微特电机 2016年12期
张 岳
(辽宁科技学院,本溪 117004)
无刷双馈电机直接转矩控制研究
张 岳
(辽宁科技学院,本溪 117004)
直接转矩结构简单,动、静态性能良好,在调速控制系统中得到广泛应用。阐述了无刷双馈电机直接转矩控制的工作原理, 提出了控制方案。基于MATLAB/Simulink软件,推导了无刷双馈电机直接转矩控制及有关控制方程的仿真模型,在此基础上进行仿真与实验研究。仿真与实验结果验证了所提出的无刷双馈电机直接转矩控制方案是可行性。
无刷双馈电机;直接转矩控制;仿真
0 引 言
无刷双馈电机(Brushless Doubly-Fed Machine, BDFM) 是既可进行交流调速运行又可进行变速恒频运行的新型电机[1-4],与矢量控制相比较,其直接转矩控制(以下简称DTC)具有结构简单、转矩响应快、电机参数鲁棒性好等特点[4-6]。本文阐述了无刷双馈电机的DTC原理,并利用MATLAB进行仿真验证。
1 BDFM的直接转矩控制原理
无刷双馈电机在转子速d-q坐标系上的数学模型如式(1)所示[7-9]:
(1)
式中:Rp,Lsp表示功率绕组的电阻值、自感值;Rc,Lsc表示控制绕组的电阻值、自感值;Lm表示定子绕组与转子的互感值;Rr,Lr,ωr表示转子的电阻值、自感值及电机机械角速度;uqp,udp,uqc,udc,uqr,udr,Iqp,Idp,Iqc,Idc,Iqr,Idr分别为电压、电流的瞬态值。下标字母p,c,s,r分别代表功率绕组、控制绕组、定子侧、转子侧,q,d分别代表q轴、d轴分量;p代表微分算子。
电磁转矩:
Te=Pp(iqpψdp-idpψqp)+Pc(iqcψdc-idcψqc)
(2)
ψqp,ψdp,ψqc,ψdc由下列式子给出:
ψqp=Lspiqp+Lmiqc
(3)
ψdp=Lspidp+Lmidc
(4)
ψqc=Lsciqc+Lmiqp
(5)
ψdc=Lscidc+Lmidp
(6)
由式(2)~式(6)整理得:
(7)
无刷双馈电机功率绕组的磁链瞬时值[7-10]:
(8)
控制绕组的磁链瞬时值:
(9)
将式(9)离散化得:
ψc=ucΔt+ψc0
(10)
图1为功率绕组和控制绕组的磁链矢量关系。
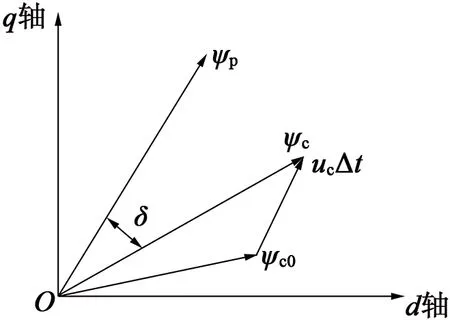
图1 功率绕组和控制绕组的磁链矢量关系
图2为无刷双馈电机的DTC工作原理图。电机速度给定值与速度反馈值相比较得到的速度差值经过速度调节器后形成转矩的给定值,转矩的反馈值可用功率绕组和控制绕组电压电流的值求得。转矩给定值与反馈值相比较后,经转矩滞环比较器送给控制绕组电压矢量选择器。控制绕组磁链幅值可根据控制绕组电压电流测量值由式(9)计算出,与磁链给定值相比较后通过磁链滞环比较器送至控制绕组电压矢量选择器,根据控制绕组磁链幅值和转矩增减的要求,控制绕组电压矢量选择器决定所选用的控制绕组电压矢量[10-12]。
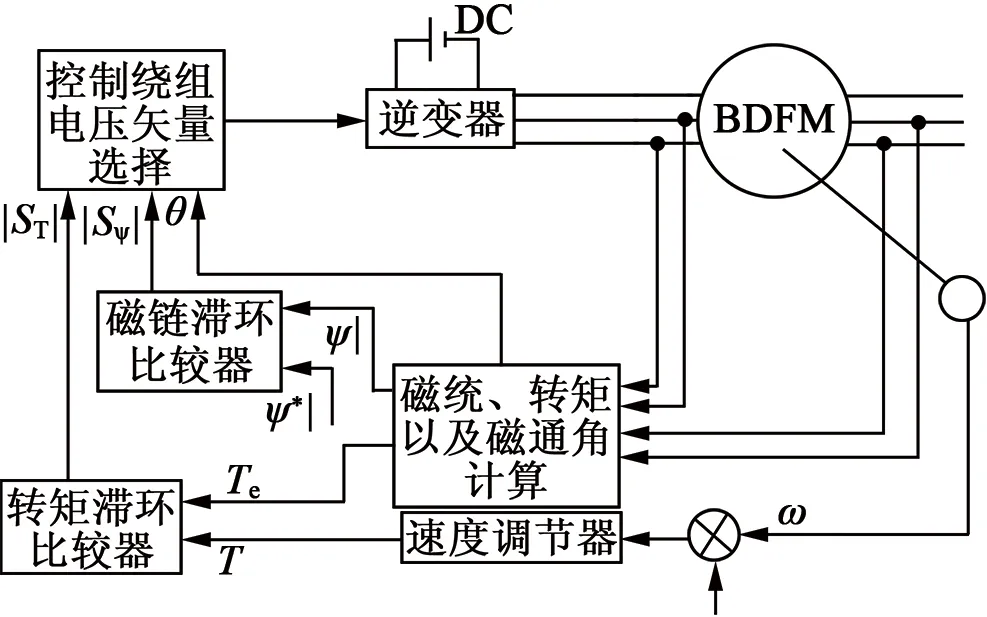
图2 无刷双馈电机直接转矩控制结构图
2 仿真模型的实现
根据上述BDFM直接转矩的基本原理,利用MATLAB构建的无刷双馈电机直接转矩控制的Simulink图[13-14]如图3所示,下面分别介绍仿真模块。
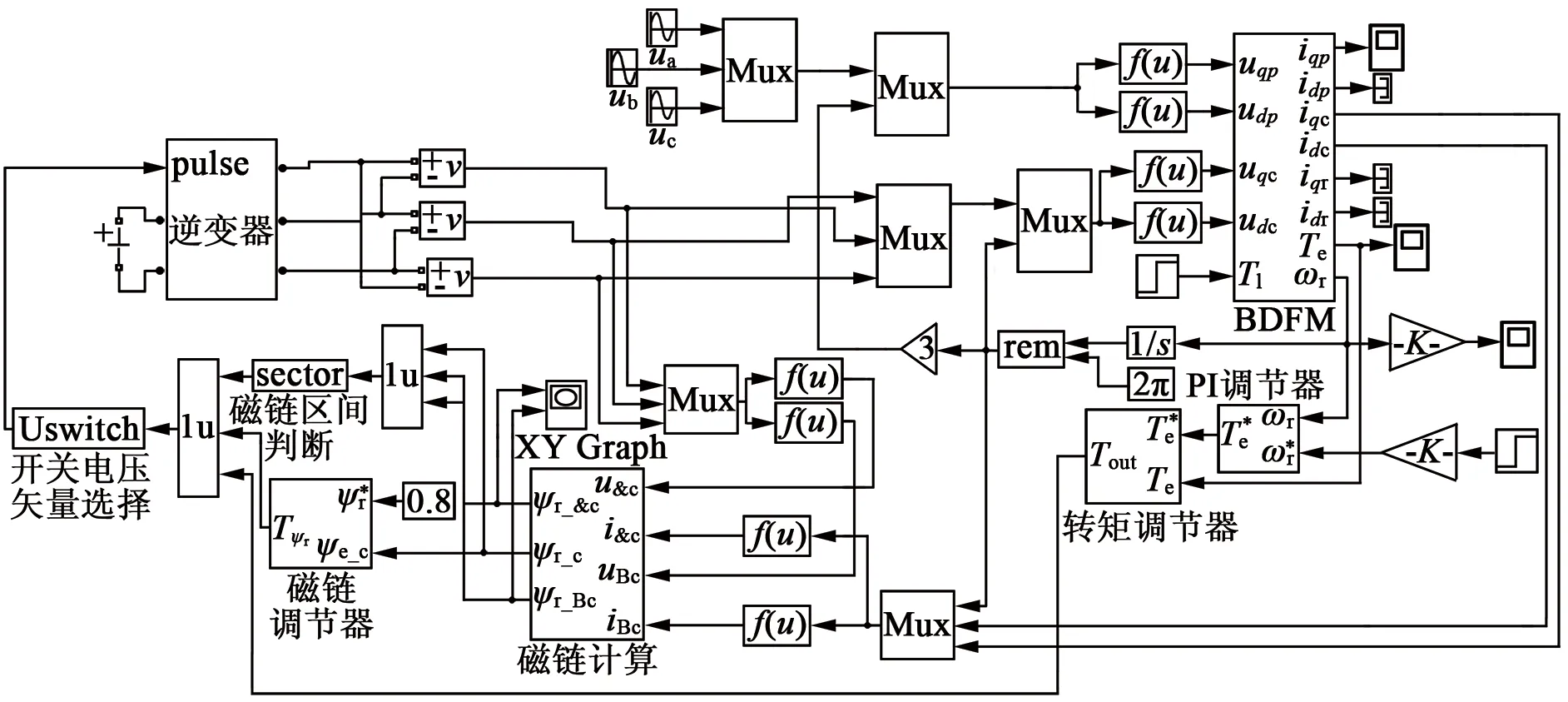
图3 BDFM 的DTC Simulink图
2.1 磁链模型
本文的DTC磁链计算模型采用u-i模型[8-9], 参照式(9),利用MATLAB构建的仿真模型如图4所示。
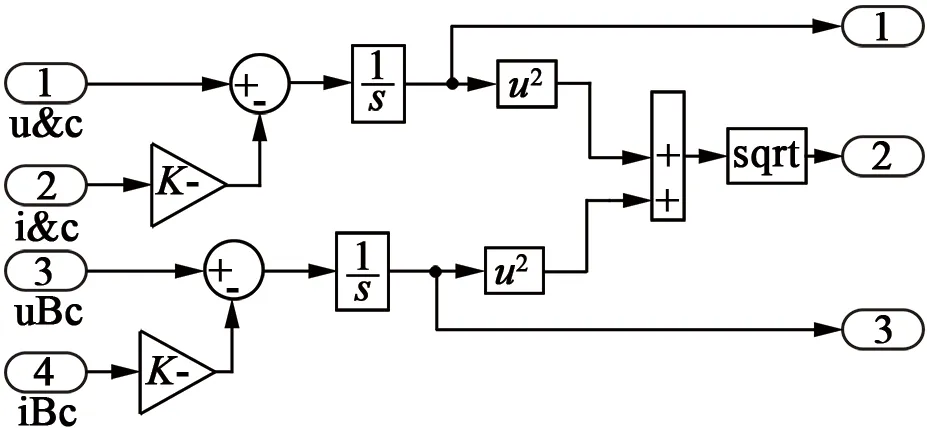
图4 u-i Simulink图
2.2 转速调节器

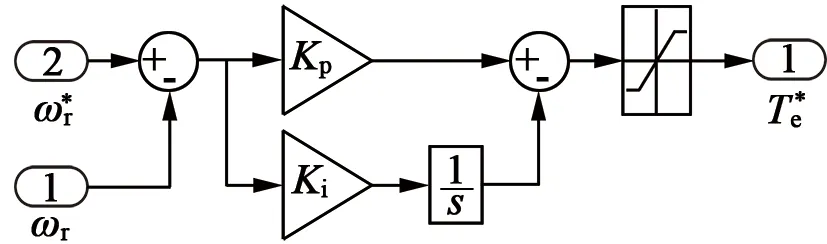
图5 转速调节器仿真模型
2.3 转矩、磁链滞环比较器

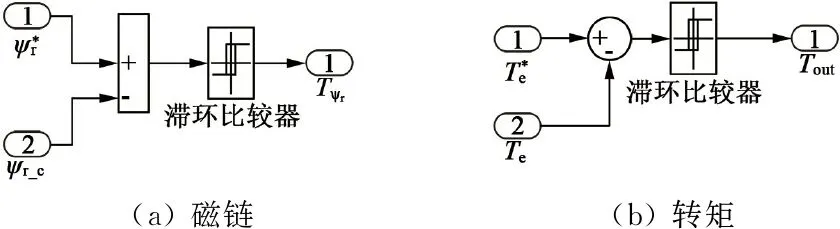
图6 转矩、磁链滞环比较器仿真模型
2.4 开关电压矢量选择
合理地选择6个相位相差60°的非零电压矢量与2个零电压矢量,可使控制绕组的磁链轨迹近似圆形[15],如图7所示。
转矩值Tψr、磁链滞环调节值Tout以及磁链区间判断模块θi确定逆变器开关状态的选择。一旦开关状态被估计出,满足磁链、转矩变化的电压矢量将加在控制绕组上,转矩、磁链的幅值分别受电压矢量的切向分量、径向分量控制。电压矢量开关选择表见表1,开关电压矢量选择采用S函数实现。
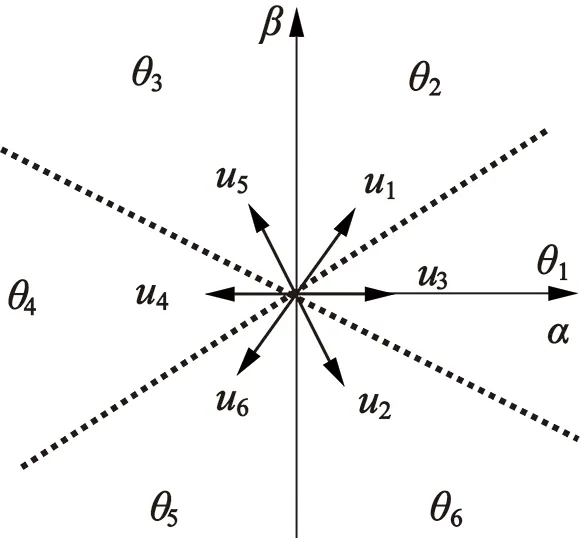
图7 电压矢量图
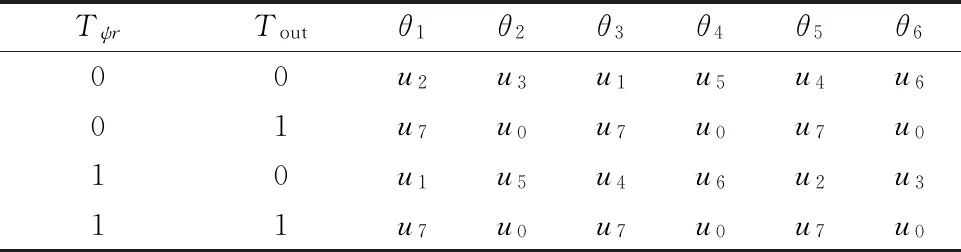
表1 电压矢量开关选择表
3 仿真与实验
仿真所用BDFM数据[16-17]:Pp=3,Pc=1,Rp=0.81 Ω,Lsp=80 mH,Rc=1.81 Ω,Lsc=630 mH,Lm=4.3 mH,Rr=1.57 Ω,Lr=0.04 mH,J=0.02 kg·m2。转矩滞环比较器的滞环为-0.3~0.3 N·m,磁链滞环比较器的滞环为-0.005~0.005 Wb,给定磁链为0.8 Wb,PI速度调节器Kp=0.4,Ki=0.08,电机最大转矩限制为20 N·m。
仿真曲线见图8,图8(a)为BDFM的电磁转矩,图8(b)为BDFM的控制绕组的磁链轨迹,图8(c)为BDFM的逆变电压,图8(d)为BDFM的转速。从仿真曲线中可以看到,电磁转矩经过15 ms左右达到给定值,动态响应较快,但有较大脉动,转速也在10ms左右达到给定值,磁链轨迹基本为圆形轨迹,仿真模型能完成BDFM的DTC。
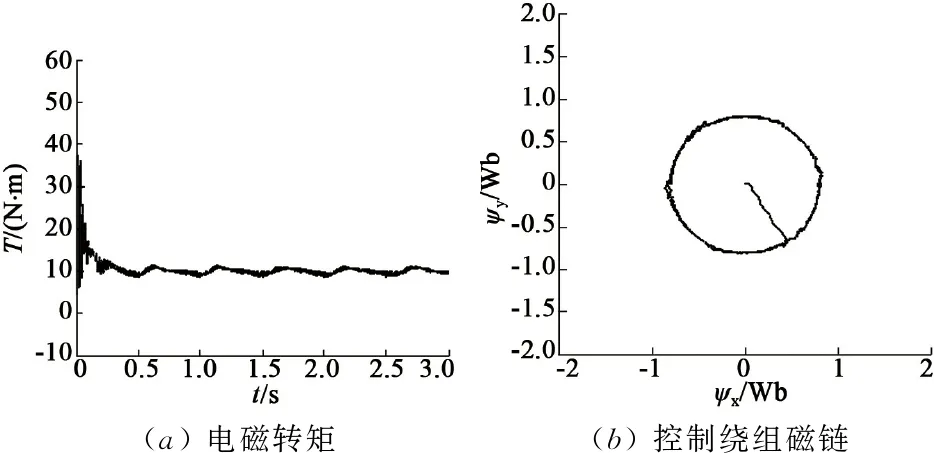
(a)电磁转矩(b)控制绕组磁链
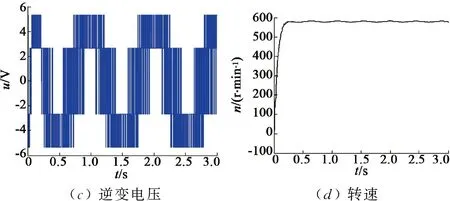
(c)逆变电压(d)转速
图8 无刷双馈电机直接转矩控制仿真图
图9给出了改变给定转速对系统影响的仿真曲线。图9(a)为BDFM的电磁转矩,图9(b)为BDFM的控制绕组的磁链轨迹,图9(c)为BDFM的逆变电压,图9(d)为BDFM的转速。系统初始给定转速为570 r/min,在运行到2 s时系统转速变为500 r/min,观察转速、转矩响应的变化。转速大约经过10 ms调整后达到稳定值,转矩在2 s处有一个波动,在经过短暂的调整后达到稳定值。表明系统能很快进入稳定状态,并能快速跟随给定的变化,转速、转矩都具有较理想的性能,控制绕组的磁链轨迹基本保持圆形,不随速度给定变化而变化。
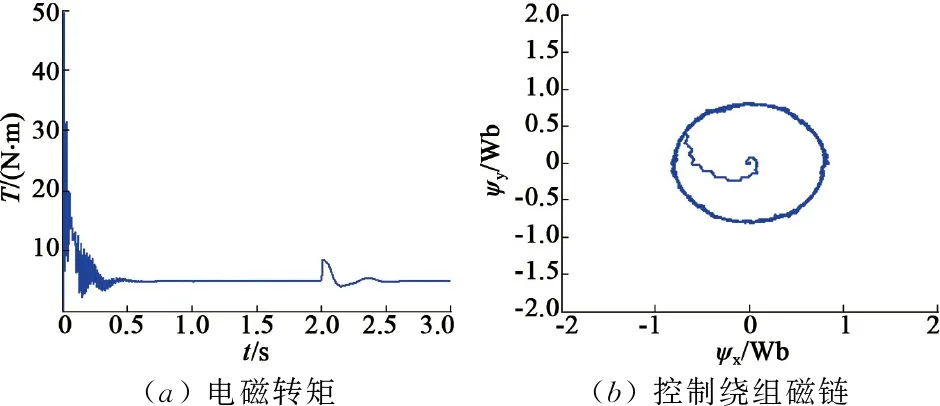
(a)电磁转矩(b)控制绕组磁链
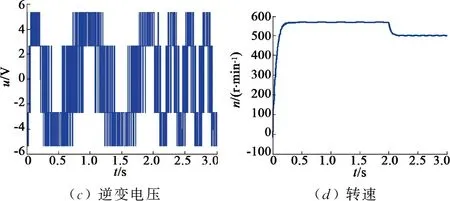
(c)逆变电压(d)转速
图9 参数变数时的无刷双馈电机直接转矩控制仿真图
图10 给出了无刷双馈电机逆变电压的实验波形,与理论分析的结果基本相同。图11为无刷双馈电机直接转矩控制中控制绕组的电流实验波,由于只有6个空间电压矢量,因此,电流波形明显的发生畸变。
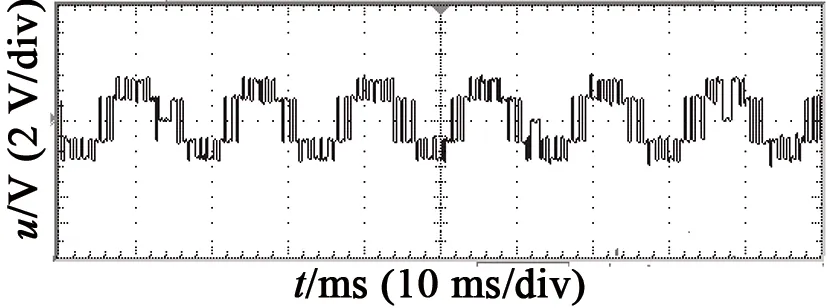
图10 无刷双馈电机的逆变电压实验波形截图
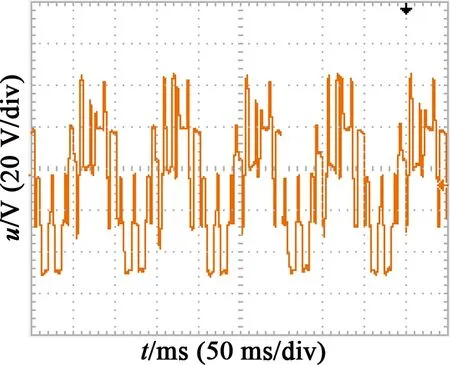
图11 无刷双馈电机的控制绕组电流实验波形截图
4 结 语
本文利用MATLAB构建BDFM直接转矩控制系统,仿真结果表明该模型结构简单、直观,参数修改方便,转矩响应快、脉动小,控制绕组的磁链运动轨迹接近圆形。仿真和实验结果说明,BDFM采用直接转矩控制技术,不仅理论上可行,技术上也是可行的。
[1] 张帆,林友杰,罗军波,等.无刷双馈电机的d-q数学模型[J].防爆电机,2001,108(3):5-8.
[2] 王凤翔,张凤阁.磁场调制式无刷双馈交流电机[M].长春:吉林大学出版社,2004.
[3] 张爱玲,张洋.基于转矩预测控制的无刷双馈电机直接转矩控制系统[J].电机与控制学报,2007,11(4):326-330.
[4] 杨俊华,刘远涛,谢景凤,等.无刷双馈电机滑模变结构直接转矩控制[J].控制理论与应用,2011,28(9):1195-1201.
[5] 李夙.异步电动机直接转矩控制[M].北京:机械工业出版社,1998.
[6] 刘晓鹏.无刷双馈电机变频调速系统的研究[D].太原:太原理工大学,2005.
[7] 刘晓鹏,张爱玲,樊双英.无刷双馈电机直接转矩控制策略的研究[J].微特电机,2006,34(3):25-27.
[8] 彭冠炎.无刷双馈电机及其直接转矩控制的研究[D].广州:华南理工大学,2010.
[9] 张喜海.无刷双馈电机直接转矩控制系统研究[D].成都:西南交通大学,2010.
[10] 张喜海,王奔,冷北雪,等.基于转矩变化估算的无刷双馈电机直接转矩控制[J].青岛科技大学学报(自然科技版),2010,31(6):636-640.
[11] 王亮,林成武,姚鹏.双馈风力发电机的直接转矩控制技术[J].沈阳工业大学学报,2006,28(2):206-209.
[12] 郑文亮.无刷双馈电机软启动特性研究[J].防爆电机,2011,46(1):23-26.
[13] BUJA G S,KAZMIERKOWSKI M P.Direct torque control of PWM inverter-fed AC motor a survery[J].IEEE Transactions on Industrial Electronics,2004,51(4):744-754.
[14] 李春叶.无刷双馈电机的开环仿真研究[J].山西广播电视大学学报,2005,10(6):71-72.
[15] 杨清.无刷双馈电机的开环下动态仿真研究[J].机械管理开发,2005(4):5-6.
[16] 宋颖慧,李玉忍,牟海涛,等.无刷双馈电机的直接转矩控制仿真[J].微特电机,2012,40(10):45-47.
[17] 黄志武,刘心昊,年晓红,等.基于Simulink/S函数的直接转矩控制系统仿真研究[J].自动化技术与应用,2006,25(4):52-56.
Study of Direct Torque Control for Brushless Doubly-Fed Machine
ZHANGYue
(Liaoning Institute of Science and Technology,Benxi 117004,China)
Direct torque control (DTC) has been widely used in adjustable speed system as it has good dynamic capability and stability as well as simple control system. The scheme of direct torque control of brushless doubly-fed machine was studied. On these basis, the simulation model of DTC of BDFM based on MATLAB/Simulink software was given. The results of simulation and experiment are given and that DTC of BDFM is reasonable.
brushless doubly-fed machine; direct torque control; simulation
2015-07-04
辽宁科技学院博士科研启动基金项目(1212B2)
张岳(1965-),男,博士,教授,研究方向为特种电机及其控制。
TM34
A
1004-7018(2016)12-0068-04
猜你喜欢
电机与控制应用(2022年1期)2022-09-01
大电机技术(2022年3期)2022-08-06
湖南电力(2022年3期)2022-07-07
电机与控制应用(2022年4期)2022-06-27
大电机技术(2022年1期)2022-03-16
防爆电机(2021年6期)2022-01-17
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年2期)2016-04-12