ZY-3卫星异轨立体影像几何定位精度分析
2016-02-21 02:51:20胡芬杨博唐新明高小明
航天返回与遥感 2016年1期
胡芬杨博唐新明高小明
(1 国家测绘地理信息局卫星测绘应用中心,北京 100048)
(2 卫星测绘技术与应用国家测绘地理信息局重点实验室,北京 100048)
(3 武汉大学计算机学院,武汉 430079)
(4 武汉大学地球空间信息技术协同创新中心,武汉430079)
ZY-3卫星异轨立体影像几何定位精度分析
胡芬1,2杨博3,4唐新明1,2高小明1,2
(1 国家测绘地理信息局卫星测绘应用中心,北京 100048)
(2 卫星测绘技术与应用国家测绘地理信息局重点实验室,北京 100048)
(3 武汉大学计算机学院,武汉 430079)
(4 武汉大学地球空间信息技术协同创新中心,武汉430079)
文章选取“资源三号”(ZY-3)卫星在两个轨道上分别侧摆10°和–10.6°获取的山东同一地区全色正视相机影像,构成连续覆盖 4景区域的异轨立体影像。以区域内均匀分布的 35个高精度外业GPS点作为控制数据来源,进行影像平差定向和几何定位精度统计。实验结果表明,在基高比为0.36左右的非理想条件下,无控制点的平面误差和高程误差均值分别为 1.5m和 85m,中误差分别为 2.3m和4.0m,高程精度明显低于平面精度;基于少量控制点对系统误差改正效果明显,在单控制点条件下的平面误差和高程误差均值分别为2.4m和1.7m,中误差分别为1.4m和4.0m,完全满足1∶5万比例尺精度要求。文章的研究内容对于国产光学卫星异轨立体影像获取效能的发挥能起到一定的参考作用。
异轨立体影像 区域网平差 几何定位精度分析 “资源三号”卫星
0 引言
同轨观测和异轨观测是卫星获取立体影像的两种典型方式[1-2]。早在1986年,法国发射的SPOT卫星所搭载的高分辨率可见光传感器HRV的地面分辨率达到10m,并能通过侧视观测在相邻轨道间构成异轨立体,其良好的基高比很适合立体测图,对卫星影像的测绘应用产生了重大影响[3-4]。随后的SPOT-5卫星进一步提高了立体成像能力,可以获取同轨或异轨立体影像[5-7]。近年来,IKONOS,Geoeye、Pleiades-1A/1B、SPOT-6/7、Worldview-1/2/3等高分辨率商业遥感卫星平台均具备了大角度、快速姿态机动能力,能灵活地实现同轨或异轨立体观测[8]。国产光学卫星立体影像获取能力也逐步提高[9-10],“资源三号”(ZY-3)、“天绘一号”等国产高分辨率光学测绘遥感卫星沿用SPOT-5、IRS-P5、ALOS等卫星的多线阵同轨立体摄影测量体制,即安装不同指向的2台或3台线阵相机来完成立体观测任务,具有立体观测条件理想、数据获取高效、利于大规模测绘产品生产等特点,尽管此类卫星还具备一定程度的侧摆能力,能够获取异轨立体影像,提升成像方式的灵活性,但是异轨立体影像的几何定位精度和应用潜力一直未被发掘。
为促进卫星数据获取效能的发挥,本文选取ZY-3卫星在两个轨道上分别侧摆10°和–10.6°获取的山东同一地区全色正视相机影像,构成连续覆盖4景区域的异轨立体影像;以区域内分布均匀的35个高精度外业GPS点作为控制数据来源,在控制点像点坐标高精度量测和影像同名点密集匹配的基础上,进行影像平差定向和几何定位精度统计。结果表明,基于少量控制点补偿系统误差之后,平面误差和高程误差均值有较大改善,分别为2.4m和1.7m,中误差分别为1.4m和4.0m,满足1∶5万比例尺精度要求,由此可见正视相机获取的异轨立体影像能够作为同轨立体影像的补充,提升数据来源的多样性。
1 定位精度理论分析
影响卫星立体影像几何定位精度的因素很多[2],概括起来主要包括以下几个方面:相机分辨率、相机主点和畸变、CCD拼接精度、姿态角误差、像点量测误差和轨道误差、时统误差、摄影基高比等。在无控制点情况下,姿态测量精度和事后姿态处理精度是最重要的技术指标,姿态测量精度的影响因素包括星敏感器和陀螺以及相应的控制系统;在有控制点情况下,卫星的姿态稳定度是最重要的技术指标,影响姿态稳定度的则是卫星上的活动部件,以及相应的姿态控制系统。通常,满足高程精度相比平面精度更为困难。
在传感器几何关系经过精确检校、并且立体像对之间已转换为核线几何关系的理想情况下,高程误差的理论计算公式为

式中 z为高程误差;ε为像点匹配沿核线方向的误差;B为摄影基线;Ht为轨道高度。可见,立体观测由像对不同的视差产生,而基高比 B/Ht对高程测量精度有较大的影响。基高比越大,交会条件越好,高程量测的理论精度更高。传统摄影测量在分辨率一定、量测精度受限的前提下,为了获得较高的高程精度,基本上都采用大基高比(0.6~1)的方案,以实现地形三维信息的快速提取。小基高比情况下,像点量测误差和匹配误差对高程方向定位精度的影响将被放大,要达到同等精度的高程测量值,保证区域网平差精度的可靠性,对像点匹配算法及精度会有更高的要求[11]。
2 高精度几何定位方法与流程
2.1 区域网平差定向的数学模型
区域网平差定向是实现影像高精度几何定位的有效途径[12-15]。本文通过构建基于有理多项式模型(RFM)的影像区域网平差数学模型,利用影像连接点以及外业测量获取的控制点,进行区域网平差解算得到精化后的 RFM 参数和连接点地面坐标,进而利用检查点统计无控制或有控制条件下的立体影像几何定位精度。
RFM是将像方影像坐标表示为以相应物方地面三维空间坐标为自变量的多项式的比值,其基本公式如式(2)所示,其中地面坐标和影像坐标均为正则化之后的坐标,以保证计算的稳定性。
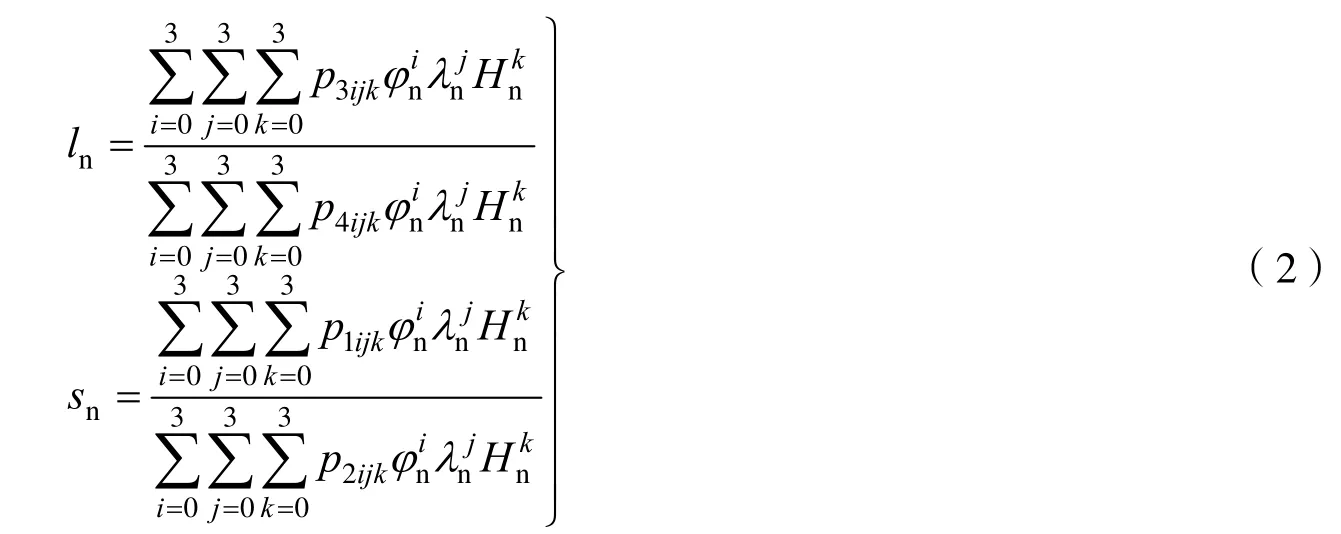
这里, (φn,λn,Hn)为正则化的地面点大地坐标,φn为纬度,λn为经度,Hn为高程坐标;(ln,sn)为正则化的影像像点坐标,其中ln代表行方向坐标,而sn则代表列方向坐标; p1i jk,p2 ijk,p3 ijk,p4ijk(i=1,2,3; j=1,2,3;k =1,2,3)代表 RFM 的有理多项式系数(rational polynomial coefficients, RPC)。(φn,λn,Hn)、(ln,sn)与非正则化的地面点大地坐标(φ,λ,H)和像点坐标(l,s)之间的关系为

式中 (l0,s0)为像点坐标的平移参数;(φ0,λ0,H0)为地面点大地坐标的平移参数;(ls, ss)为像点坐标的缩放参数;(φs, λs,Hs) 为地面点大地坐标的缩放参数;l代表像点行方向坐标;s代表列方向坐标。
为了便于后续阐述,本文将上述的RFM用函数形式表示为

基于RFM的影像区域网平差数学模型为

这里,Δl和Δs代表RFM系统误差的像方补偿模型,可根据具体情况采用平移变换模型、线性变换模型或仿射变换模型,分别如式(6)~(8)所示,模型参数 a0, b0, a1, b1, a2, b2即为像方附加参数。

基于影像间自动匹配获取的连接点信息和人工半自动量测获取的控制点信息构建区域网平差模型时,其原始平差观测值包括连接点像点坐标和控制点像点坐标两类。对于控制点像点而言,由于其对应的物方点坐标精确已知,因此,所构建的误差方程中未知参数仅包括该像点对应影像RFM的像方附加参数,显然,对于像方附加参数而言,式(5)为线性方程而无需进行线性化处理。因此,可构建误差方程为

式中 vl,vs表示像点行向和列向坐标观测值的残差。
然而,对于连接点像点而言,由于其对应的物方点坐标未知,因此,其所构建的误差方程式中未知参数除了包括影像RFM的像方附加参数外,还包括其对应物方点坐标(φ,λ,H)。对于物方点坐标(φ,λ,H)而言,式(5)为非线性方程,需要对其赋予合适的初值(φ,λ,H)0并进行线性化处理。因此,所构建的误差方程为:

2.2 高精度几何定位流程
区域网平差在无控制的条件下又被称为自由网平差,本文分别在无控制及不同控制的条件下对ZY-3卫星异轨立体影像采用区域网平差的方式进行高精度的几何定位,其流程如图1所示。
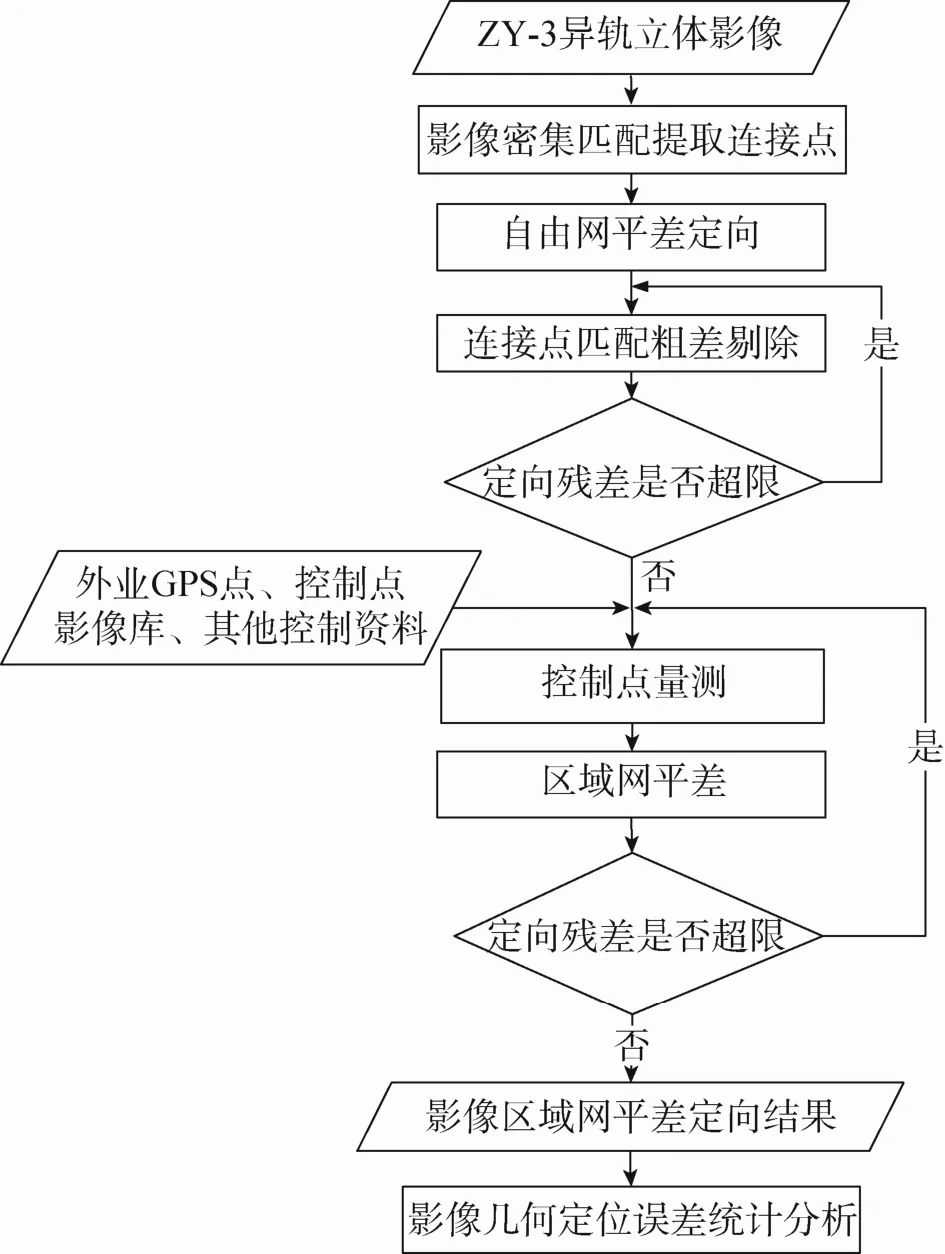
图1 ZY-3卫星异轨立体影像高精度几何定位流程Fig.1 Workflow of high-accuracy geo-positioning of ZY-3 cross-track stereo-images
首先,通过利用SIFT特征匹配方法提取大量均匀分布的连接点,充分利用ZY-3卫星轨道、姿态等参数,建立相邻轨道影像间的相对几何关系,并利用该相对几何关系和基于缩放/旋转几何不变特征的高精度定位及多影像匹配算法,实现立体影像密集匹配,提高匹配的效率和可靠性,降低误匹配率,对多种性能互补的匹配方法进行融合,兼顾影像的局部信息和全局信息;通过自由网平差定向,对观测像点的残差进行统计分析,进而采用选权迭代法实现误匹配连接点的自动识别与剔除。
然后,进行控制点半自动量测,通过区域网平差定向和定向残差分析,迭代计算得到区域网平差定向结果。
最后,在自由网平差或区域网平差的基础上,利用检查点对立体影像无控制或有控制条件下的几何定位误差进行统计分析。
3 实验结果分析
3.1 实验区及数据选择
ZY-3卫星装载的三线阵全色相机由具有22°夹角的前视、正视和后视3台线阵CCD相机构成,在轨状态下从前、正和后三个方向获取同一地物 100%地面重叠率的立体影像,前后视相机摄影基高比为0.89,具备了较为理想的同轨立体观测条件[2],为基于光学立体遥感影像的应用服务提供了保障。尽管卫星具备侧摆±32°的能力,但出于对卫星寿命的保障及降低损耗的考虑,现阶段 ZY-3卫星的工作机制对整星侧摆的幅度有所限制,一般不超过15°,并且侧摆大于5°时前后视全色相机不开机成像。为此,本文暂且针对正视全色相机获取的异轨立体影像展开定位精度分析,并从实际情况出发,尽可能地选择侧摆幅度较大的异轨立体影像为研究对象。通过定位精度分析,得出对后续研究有参考价值的结论。
本文所选的实验区域位于山东省境内,地形以丘陵为主。2014年10月24日的15502轨有覆盖该地区的4景正视相机(NAD)影像,卫星侧摆约10°;为了构成满足要求的异轨立体影像,综合考虑实际情况,2015年4月5日的17979轨,卫星通过侧摆–10.6°,再次获取了覆盖该地区的4景正视相机影像。以这8幅影像的传感器校正(SC)级产品作为数据来源,构成4个立体像对。影像基本信息如表1所示。SC级产品是对原始卫星下传影像经过辐射校正和传感器几何校正(包括CCD条带拼接、积分时间规划、内方位元素规划等),但没有经过几何处理的一级影像产品,产品带有高精度的 RFM 参数,是进行实际应用的一种最基础的分发产品[16]。影像质量良好,云量小于 5%,异轨立体重叠度优于 80%,基高比约为0.36。
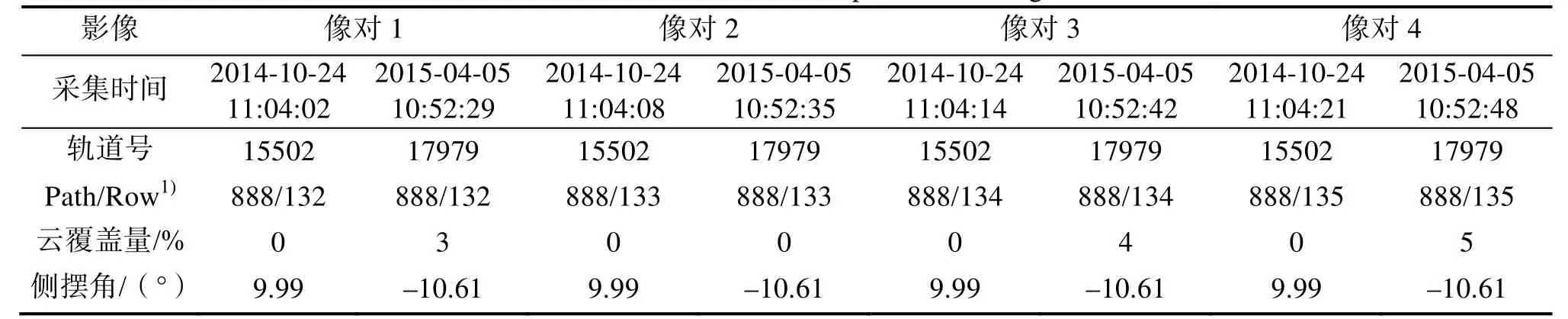
表1 影像信息列表Tab.1 Information list of experimental images
3.2 实验过程与结果分析
在平差解算前采用密集的方式对立体影像进行连接点匹配,得到匹配点的分布如图2所示。由于第3个立体像对上存在少量的朵云,局部区域无法提取影像连接点。此外,在实验区域内通过GPS外业实测手段按一定格网间距测量了35个均匀分布的高精度控制点(如图2)。由于基高比相对较小,控制点量测精度对高程精度验证的影响较大,针对此问题,在进行控制点外业测量时直接以ZY-3影像为参考数据,控制点选取影像上易于辨识的、位于地形平坦区域的明显地物特征点,如道路交叉口等,像点量测精度能够达到子像素级。
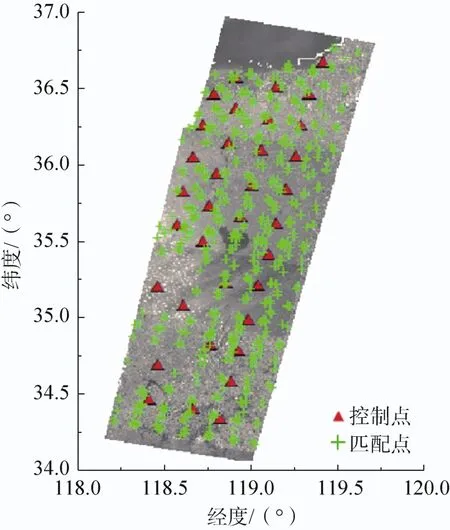
图2 实验区范围及控制点、连接点分布Fig.2 Test site area and distribution of GCPs and tie points
平差定向的结果与所构建的误差方程紧密有关,而误差方程构建又主要取决于参与平差的影像数据,对此,本文实验采取两种平差定向方式:1)对4个立体像对逐一平差定向,然后分别统计每个立体像对的几何定位精度;2)对所有影像进行整体区域网平差,然后从总体上统计几何定位精度。相对于前者,后者能充分利用立体像对之间的空间几何约束关系。
对单个立体像对逐一定向,得到的几何定位精度统计结果如表2所示。

表2 单个立体像对平差几何定位精度Tab.2 Geo-positioning accuracy of each single stereo-image adjustment
对8幅影像进行整体区域网平差,得到的几何定位精度统计结果如表3和图3所示。

表3 整体区域网平差几何定位精度Tab.3 Geo-positioning accuracy of overall block adjustment
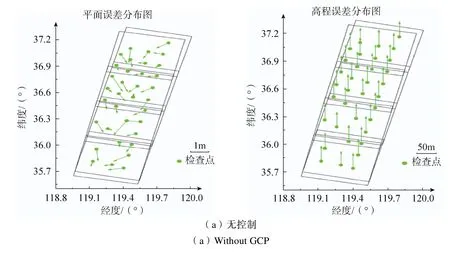

图3 整体区域网平差几何定位误差分布图Fig.3 Adjustment residuals maps of overall block adjustment
从实验结果可以看出,在无控制点的情况下,ZY-3卫星几何定位的平面误差均值为 1.5m,高程误差均值为85m,高程方向上存在明显的系统误差。当利用一个控制点参与平差时,高程方向系统误差得到有效补偿,高程精度得到明显改善,误差均值在1.7m左右,而平面精度则未有明显改变。随着控制点个数的增加,平面和高程的定位精度均有所提升。
无控制点的高程精度明显低于平面精度,实验数据的基高比较小是一个主要原因。经过整体平差后区域网内部精度较高,仅利用单个控制点即可满足要求。无论是单个立体像对平差还是整体区域网平差,基于单个控制点对系统误差改正效果明显。无控制点的平面中误差和高程中误差分别为2.3m和4.0m,在单控制点条件下,中误差分别为1.4m和4.0m。增加控制点对中误差改善不明显,表明影像产品本身的内部几何畸变较小,达到了较高的精度水平。这说明,当影像内部几何畸变较小时,即使异轨立体影像的基高比不在理想范围内,基于少量控制点也可能实现较高的几何定位精度。
单个立体像对平差和整体区域网模型平差后的几何定位精度水平总体相当,局部也无明显差异。这表明利用 ZY-3卫星影像产品进行区域网平差时,几何误差在区域网内部未发生明显的传递与累积,区域网内部的几何精度具有高度的刚性结构特征,不存在扭曲变形。
4 结束语
为促进国产光学卫星异轨立体影像获取及应用效能的发挥,提升数据来源的多样性,本文对 ZY-3卫星异轨立体影像几何定位精度展开了初步分析。在基于少量控制点进行系统误差改正之后,实验数据的几何定位平面误差和高程误差均值分别为2.4m和1.7m,中误差分别为1.4m和4.0m,满足1 ∶5万比例尺精度要求,表明 ZY-3卫星具备高精度异轨立体观测能力。从理论上讲,假如增大立体成像的基高比,影像的定位精度有望更高。
由于时间仓促且受实验条件等限制,研究仍有待深入,今后将主要从以下几个方面进行改进:1)注重数据选择的典型性和广泛性,例如用多个不同地形特点的实验区影像进行更充分的验证,侧摆角及基高比设置尽量灵活多变;2)研究多种立体像对构建方式下的几何定位精度,例如考虑利用前视和后视相机影像构建异轨立体像对;3)探索基于多种控制数据来源的几何定位精度改善方法,如考虑引入激光测高数据作为广义高程控制点等;4)利用异轨立体影像生成DSM和DOM,并对产品精度进行评价。
References)
[1]张永生, 巩丹超, 刘军, 等. 高分辨率遥感卫星应用: 成像模型、处理算法及应用技术[M]. 北京: 科学出版社, 2004. ZHANG Yongsheng, GONG Danchao, LIU Jun, et al. The Application of High Resolution Satellite——the Imaging Model, Processing Algorithm & Application Technology[M]. Beijing: Science Press, 2004. (in Chinese)
[2]唐新明, 谢俊锋, 张过. 测绘卫星技术总体发展和现状[J]. 航天返回与遥感, 2012, 33(3): 17-24. TANG Xinming, XIE Junfeng, ZHANG Guo. Development and Status of Mapping Satellite Technology[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(3): 17-24. (in Chinese)
[3]AI-ROUSAN N, CHENG P, PETRIEG, et al. Automated DEM Extraction and Orthoimage Generation from SPOT Level 1B Imagery [J]. Photogrammetry Engineering & Remote Sensing, 1997, 63(8): 965-974.
[4]燕琴, 张祖勋, 张剑清. 异轨遥感CCD 影像外方位元素的解求[J]. 武汉大学学报·信息科学版, 2001, 26(3): 270-274. YAN Qin, ZHANG Zuxun, ZHANG Jianqing. Orientation of Remote Sensing Images Taken by CCD from Different Orbits[J]. Geomatics and Information Science of Wuhan University, 2001, 26(3): 270-274. (in Chinese)
[5]张永军, 张勇. SPOT-5 HRS 立体影像无(稀少)控制绝对定位技术研究[J]. 武汉大学学报·信息科学版, 2006, 31(11): 941-944. ZHANG Yongjun, ZHANG Yong. Direct Georeferencing of SPOT-5 HRS Imagery Without (or with a Few) Ground Control Point[J]. Geomatics and Information Science of Wuhan University, 2006, 31(11): 941-944. (in Chinese)
[6]徐岳仁, 张军龙, 陈长云. DGPS和SPOT-5异轨立体像对在岷江源构造地貌研究中的应用[J]. 北京大学学报(自然科学版), 2012, 48(4): 574-582. XU Yueren, ZHANG Junlong, CHEN Changyun. Applications of DGPS Method and SPOT-5 Across-track Stereo Images on Tectonic Geomorphology Research in Origin of Minjiang River[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2012, 48(4): 574-582. (in Chinese)
[7]贾秀鹏, 焦伟利, 李丹. 基于SPOT-5异轨立体像对提取DEM试验与精度评估[J]. 测绘信息与工程, 2006, 31(2): 32-34. JIA Xiupeng, JIAO Weili, LI Dan. DEM Extraction and Accuracy Evaluation based on SPOT-5 Across-track Stereo Images[J]. Journal of Geomatics, 2006, 31(2):32-34. (in Chinese)
[8]朱红, 刘维佳, 张爱兵. 光学遥感立体测绘技术综述及发展趋势[J]. 现代雷达, 2014, 36(6): 6-12. ZHU Hong, LIU Weiwei, ZHANG Aibing. Overview and Development Trend of Optical remote Sensing Stereo Mapping Techniques [J]. Modern Radar, 2014, 36(6): 6-12.
[9]冉琼, 迟耀斌, 王智勇, 等. 基于“北京一号”小卫星异轨立体像对提取 DEM[C]. 第十二届中国体视学与图像分析学术年会论文集, 2008: 425-428. RAN Qiong, CHI Yaobin, WANG Zhiyong, et al. DEM Extraction Based on Across-track Beijing-1 Small Satellite Stereo Images[C]. The Proceedings of the 12th Annual Conference of the Chinese Academy of Stereo Vision and Image Analysis, 2008: 425-428. (in Chinese)
[10]胡莘, 曹喜滨. 三线阵立体测绘卫星的测绘精度分析[J]. 哈尔滨工业大学学报, 2008, 40(5): 695-699. HU Xin, CAO Xibin. Journal of Harbin Institute of Technology, 2008, 40(5): 695-699. (in Chinese)
[11]MORGAN G L K, LIU Jianguo, YAN Hongshi. Precise Subpixel Disparity Measurement from Very Narrow Baseline Stereo [J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(9): 3424-3433.
[12]DIAL G, GRODECKI J. Adjustment with Rational Polynomial Camera Models[C]. ACSM-ASPRS 2002 Annual Conference Procedings, 2002.
[13]元建胜. 稀少控制点异轨立体卫星影像区域网平差应用研究[J]. 海洋测绘, 2012, 32(1): 45-48. YUAN Jiansheng. Research on Block Adjustment to Space Borne Remote Sensing Stereo Images Obtained from Different Orbits with Limited GCPs[J]. Hydrographic Surveying and Charting, 2012, 32(1): 45-48. (in Chinese)
[14]张永军, 张剑清. 异轨遥感立体像对外方位元素的求解算法[J]. 武汉大学学报(信息科学版), 2003, 28(5): 521-524. ZHANG Yongjun, ZHANG Jianqing. Geomatics and Information Science of Wuhan University[J]. 2003, 28(5): 521-524. (in Chinese)
[15]吕争, 傅俏燕, 王小燕. 资源三号卫星正视影像区域网平差[J]. 航天返回与遥感, 2014, 35(1): 72-80. LV Zheng, FU Qiaoyan, WANG Xiaoyan. Research on Block Adjustment of ZY-3 Satellite NAD Images[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(1): 72-80. (in Chinese)
[16]刘斌, 孙喜亮, 邸凯昌, 等. 资源三号卫星传感器校正产品定位精度验证与分析[J]. 国土资源遥感, 2012(4): 36-40. LIU Bin, SUN Xiliang, DI Kaichang, et al. Accuracy Analysis and Validation of ZY-3’s Sensor Corrected Products[J]. Remote Sensing for Land & Resources, 2012(4): 36-40. (in Chinese)
[17]唐新明. 资源三号测绘卫星三线阵成像几何模型构建与精度初步验证[J]. 测绘学报, 2012, 41(2): 191-198. TANG Xinming. Triple Linear-array Imaging Geometry Model of ZY-3 Mapping Satellite and Its Validation[J]. Acta Geodaeticaet Cartographica Sinica, 2012, 41(2): 191-198.(in Chinese)
[18]李松明, 李岩, 李劲东. “天绘一号”传输型摄影测量与遥感卫星[J]. 遥感学报, 2012, 16(增刊): 10-16. LI Songming, LI Yan, LI Jindong. Mapping Satellite-1 Transmission Type Photogrammetric and Remote Sensing Satellite[J]. Journal of Remote Sensing, 2012, 16(S1): 10–16. (in Chinese)
Geo-positioning Accuracy Analysis of ZY-3 Cross-track Stereo-images
HU Fen1,2YANG Bo3,4TANG Xinming1,2GAO Xiaoming1,2
(1 Satellite Surveying and Mapping Application Center, National Administration of Surveying, Mapping and Geoinformation, Beijing 100048, China)
(2 Key Laboratory of Satellite Mapping Technology and Application, NASG, Beijing 100048, China)
(3 Computer School of Wuhan University, Wuhan 430079, China)
(4 Collaborative Innovation Center for Geospatial Technology, Wuhan 430079, China)
In this paper, four continuous scenes of nadir panchromatic images covering a certain district of Shandong Province in China are captured twice from two orbits and then are chosen to form four pairs of cross-track stereo-images, with 10 and –10.6 degrees side-looking angles separately. Thirty-five accurate and evenly-distributed GPS points collected in field are used as GCPs, the image points of which are measured accurately on the images, and the geo-positioning accuracy of these cross-track stereo-images is analyzed. It is demonstrated by the experimental results that when the B/Htratio is 0.36 which is not ideal, the horizontal and vertical systematic error without GCPs are 1.5m and 85m, and the RMS error are 2.3m and 4m, separately, in which the horizontal accuracy is much better than that in the vertical direction. With only a few GCPs, the systematic error can be obviously compensated, that is, with only one GCP the mean error values are reduced to 2.4m and 1.7m in horizontal and vertical directions, with the RMS error at the 1.4m and 4m level, respectively.Overall, the 1∶50000 scale mapping requirement can be thoroughly reached. This research to a certain degree gives reference to the effectiveness exertion of cross-track stereo-images acquisition of domestic optical satellites.
cross-track stereo-images; block adjustment; geo-positioning accuracy analysis ; ZY-3 satellite
P237
A
1009-8518(2016)01-0071-09
10.3969/j.issn.1009-8518.2016.01.009
胡芬,女,1984年生,博士,2010年获武汉大学摄影测量与遥感专业博士学位,副研究员。研究方向为新型传感器的数字摄影测量、高分辨率卫星影像几何处理算法等。E-mail:huf@sasmac.cn。
(编辑:夏淑密)
2015-11-06
测绘地理信息公益性行业科研专项(201412007);2015年基础测绘科技项目(A1501-3)
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
导航定位学报(2022年4期)2022-08-15 08:29:12
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
测绘科学与工程(2017年5期)2017-05-07 06:30:42
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21
遥感信息(2015年3期)2015-12-13 07:26:50
全球定位系统(2015年4期)2015-02-28 12:38:12