基于辨识的低温制冷系统控制率设计方法
2016-02-21 02:51金占雷孙启扬张新玉周峰
航天返回与遥感 2016年1期
金占雷 孙启扬 张新玉 周峰
(北京空间机电研究所,北京 100094)
基于辨识的低温制冷系统控制率设计方法
金占雷 孙启扬 张新玉 周峰
(北京空间机电研究所,北京 100094)
为提高低温制冷控制系统的调试效率和控制效果,文章提出一种基于阶跃响应系统辨识的低温制冷机控制率设计方法。首先分析了控温点80K附近的制冷机杜瓦组件漏热情况,结果表明在控温点附近制冷机的漏热近乎恒定不变,可以用传统阶跃响应辨识方法对制冷机进行系统辨识;然后在控温点附近输入阶跃驱动信号并采集到制冷机的系统响应曲线,通过Matlab系统辨识工具箱进行系统辨识得到制冷机传递函数;再根据控制目标和被控对象特性设计了PI控制算法,并分析了控制算法参数变化对控制效果的影响;最后将控制算法进行离散数字化,得到可以在单片机程序中运行的时域离散数字算法,并进行了实验验证。实验结果和理论仿真结果吻合较好,证明了辨识结果的正确性及通过系统辨识进行控制率设计的可行性,为进一步深入研究低温制冷系统控制算法,提高低温制冷控制系统调试效率和控制效果提供了重要依据。
低温制冷 阶跃响应 辨识 控制率 红外遥感
0 引言
红外遥感具有全天候工作的优点,在海洋、气象、地球资源、军事等方面都得到了广泛应用[1-4]。空间用红外探测器材料在室温附近会产生固有热激发,导致大的暗电流和噪声,为了抑制探测器噪声,获得高信噪比,通常采用空间制冷机提供稳定的低温工作环境[5-7]。制冷机是一个包含电磁、机械、动力学的复杂热力系统,系统中各复杂部件相互联系耦合,目前还没有完备的模型可以精确地描述制冷机工作过程[8]。
随着空间低温制冷机在红外遥感领域应用的日益广泛,越来越多专家学者投入到制冷控制系统的研究中来。文献[8]研究表明制冷机大部分参数随着冷端温度的降低而变化,建立准确数学模型的难度很大;文献[9]采用积分分离数字PID控制算法避免了系统的过大超调;文献[10]将自抗扰控制策略用于制冷控制,消除了快速性和超调之间的矛盾;文献[11]采用两级温度控制的方法控制大热容冷却对象的温度,大幅提高了大热容对象的温度稳定性;文献[12]总结了国内外制冷控制系统的研究现状,指出由于制冷机结构复杂,控制器参数必须依靠经验和现场调试来确定;文献[13]通过变速积分PID算法减小了超调;文献[14]研究电流追踪型 PWM 控制方法,使电机电流得到高品质控制。上述研究均没有对制冷机进行定量建模分析,控制器参数基本依靠现场调试确定,控制算法的可借鉴性、可移植性不强。
本文将首先进行制冷机杜瓦组件漏热情况分析,确定80K控温点附近的漏热稳定,可以进行系统辨识;再采用阶跃响应进行制冷机的系统辨识,得到系统的数学模型;以数学模型为基础进行控制率的设计,并分析控制参数变化对控制效果的影响;最后将对控制算法进行实验验证。
1 制冷机的建模
本文所研究的低温制冷系统包括制冷控制器和空间制冷机,其中空间制冷机为高可靠长寿命的牛津式脉管制冷机。制冷控制器根据反馈温度与控温目标指令的偏差调节正弦波调制信号(SPWM)的占空比,通过控制输入电压实现制冷量的控制,最终达到调节和控制冷端温度的目的。
1.1制冷机杜瓦组件漏热分析
图1为制冷机杜瓦组件示意图,焦平面电缆的传导热为QL;杜瓦外壳对冷屏的辐射热为QCSR;窗片对冷屏的辐射热为QAP。制冷机杜瓦组件的漏热可用式(1)表示[15]。
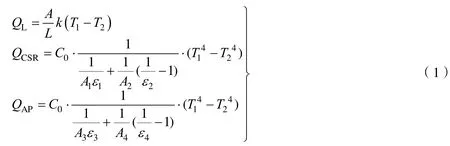
式中 T1为环境温度;T2为冷屏温度;k为热传导率;A为电缆传热横截面积;A1为冷屏外表面辐射面积;A2为杜瓦内表面辐射面积;A3为冷屏窗口辐射面积;A4为窗片内表面辐射面积;ε1为冷屏外表面辐射系数;ε2为杜瓦内表面辐射系数;ε3为冷屏窗口辐射系数;ε4为窗片内表面辐射系数;黑体辐射常数C0=5.67W·m–2·K–4。
制冷机杜瓦组件在降温过程中的漏热变化情况如图 2所示,当 T1=80K、T2=298K时,QL=0.1W、QCSR=0.08W、QAP=0.12W。可以看出,当焦面温度达到80K附近时,辐射漏热基本保持恒定;而在导线漏热变化远小于制冷机的输出冷量,因此认定在调节过程中制冷机的漏热近乎恒定不变,可以对制冷机进行系统辨识。
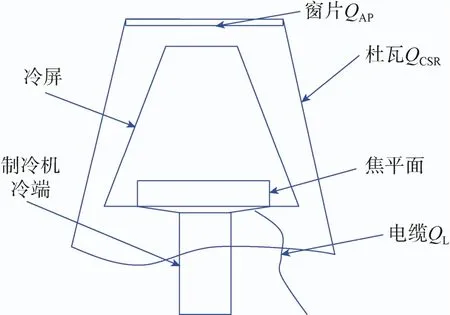
图1 制冷机杜瓦组件示意Fig.1 Sketch of cryocooler and dewar components

图2 制冷机杜瓦组件漏热曲线Fig.2 Leakage of cryocooler-dewar against temperature
1.2 制冷机辨识建模
传统辨识方法包括:脉冲响应法、阶跃响应法、正弦波响应法。阶跃响应法适用于系统的输入为突变性质信号的情况,与空间制冷机目标温度变化时输入电压突变的工况接近,因此本试验采用阶跃响应法进行系统辨识。合理的阶跃信号幅值是辨识成功重要保证,过小的幅值不能保证测试结果的可靠性;过大的幅值会使系统进入非线性区,一般取正常输入信号的5%~10%[16],本实验取1V。
在80K控温点,制冷机电功率输入接口处输入1V阶跃信号进行响应测试,测试时间600s;利用制冷机自带测温二极管进行温度模拟量测量,专用测试设备将温度模拟信号转化为数字量,测温频率1Hz。试验结果如图3所示,图中横坐标为测试时间,纵坐标为测温二极管输出的温度模拟量,1.057V为焦面温度80K时对应的二极管输出电压值。
在Matlab的系统辨识工具箱中,采用一阶、一阶滞后、二阶、二阶滞后等多种模型对以上阶跃响应进行辨识,其中式(2)的二阶系统模型符合度最高,均方根误差小于1%[17]。辨识结果表明该空间制冷机为二阶系统,即

式中 G0(s)为复变函数,是输出温度与输入电压在复频域的函数表示;s为复频率,s=jω,ω为角频率;K为系统放大倍率,辨识结果 K=0.005 111;τ1,τ2为时间常数,辨识结果分别为 τ1=3.736 7s,τ2=145.368 1s。
式(2)对应的频率响应如图4所示,下面将以此对象特性为基础进行控制率设计。
2 控制算法设计
过程控制系统首先要保证系统稳定性和稳态精度,本文研究的空间低温制冷系统要求对于常值指令稳态误差为 0,因此设计为Ⅰ型系统;考虑空间制冷机对象特性长时间在轨运行参数可能发生变化,为保证系统可靠性,相位裕度设计稍大,为60°左右[18]。
PID和PI是过程控制系统的常用算法[15],由于制冷机的惯性较大,微分系数取值太小效果不明显,取值过大又对测温噪声太敏感,因此选用PI控制算法,其传递函数为

式中 复变函数Gc(s)是PI控制算法输出与输入关系在复频域的函数表示;Kp为比例系数,Ki为积分系数。
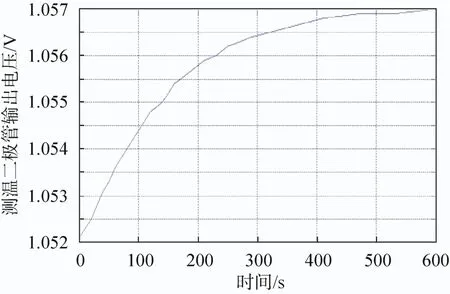
图3 空间制冷机阶跃响应Fig.3 Step response of space cryocooler
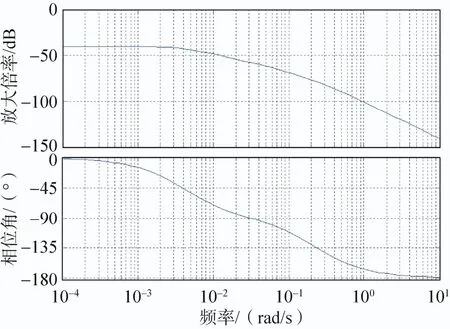
图4 制冷机在80K控温点的频率响应Fig.4 Frequency response of cryocooler at 80K temperature
PI低温制冷控制系统的Simulink建模如图5所示,实测驱动电路的放大倍率为0.116 5,为避免输入温度阶跃信号引起制冷机撞缸,在电路中设计了时间常数 0.1s的低通滤波,因此驱动电路的传函为;测温A/D选用12位转换器,设计模拟转换数字的转换放大倍率为9 009倍。

图5 基于PI控制的低温制冷系统Simulink模型Fig.5 Simulink model of cryocooler system based on PI control method
将图5进行整理,采用PI控制的低温制冷系统开环传函为

式中 G1(s)为复变函数,是输出温度与输入温度指令在复频域的函数表示。
由式(4)可知,低温制冷系统开环传函的分母有一个s,是一个Ⅰ型系统。被控对象及硬件电路的放大倍率为定值,通过调整Ki改变低频放大倍率,通过调整Kp/Ki的比值改变系统的相位裕度。当Ki=0.1时,Kp/Ki分别取10、30、90的低温制冷系统开环频响如图6(a)所示;当Kp/Ki=30时,Ki分别取0.03,0.1,0.3的系统开环频响如图6(b)所示。
由图6可以看出,当Kp=3、Ki=0.1时,系统相位裕度60°左右,且剪切频率附近的相位变化平缓,系统鲁棒性较好。即

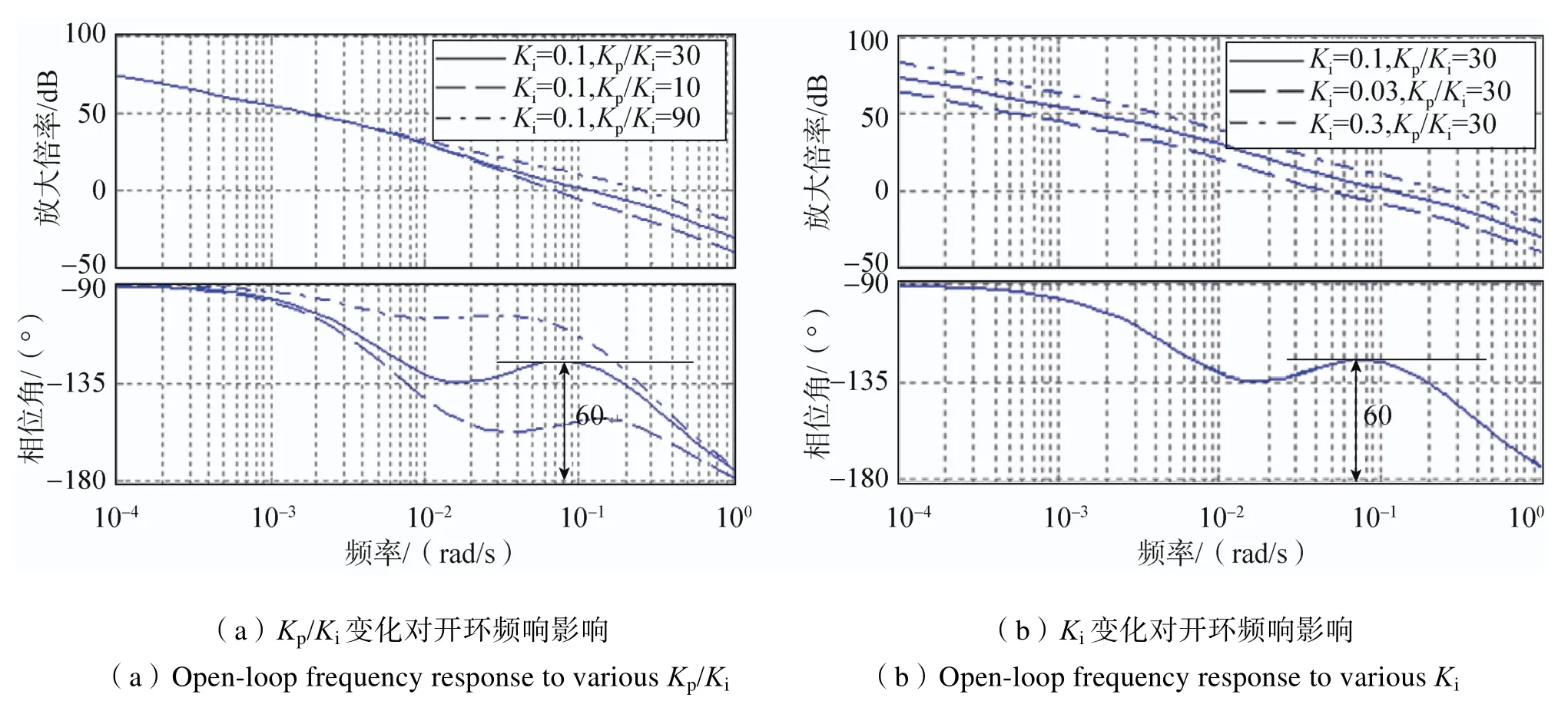
图6 不同Kp、Ki的系统开环频率响应Fig.6 Open frequency response of various Kpand Ki
3 实验验证
为了证明空间制冷机模型以及基于系统辨识制冷控制算法的正确性,将以上 PI控制算法代入实际低温制冷系统进行验证。以上建模 PI算法基于连续系统,而实际系统为单片机离散系统,因此要进行离散化。
实测系统软件运行一次的时间为62ms,PI控制算法式(5)离散化可表示为

式中 Gz(z)为复变函数,是离散PI控制算法输出与输入关系在复频域的函数表示;z为复变量,z=ejω。
将式(6)代替式(5)并加入饱和特性,则 PI控制算法离散后的低温制冷控制系统Simulink模型如图7所示。
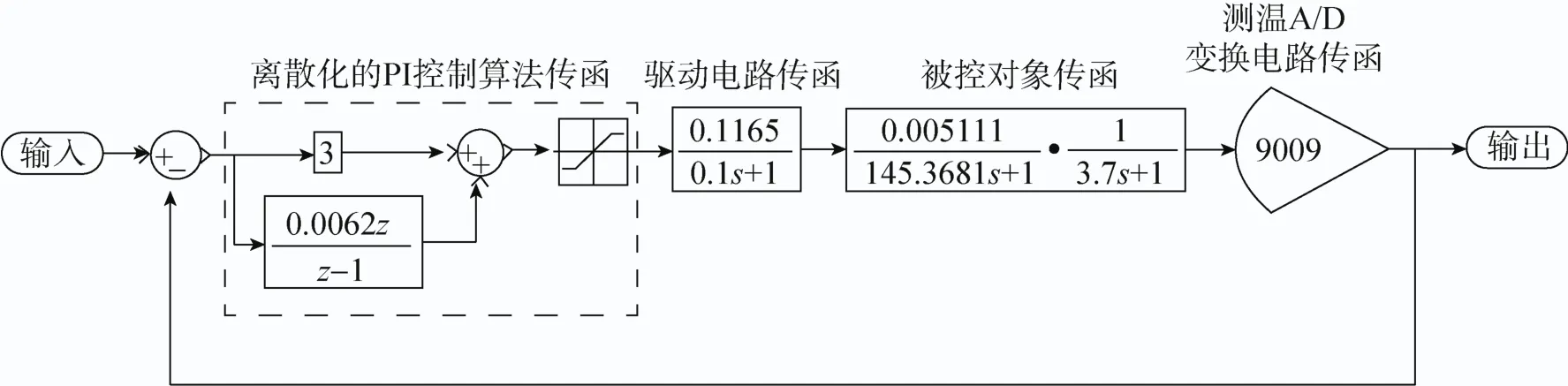
图7 控制率离散化的低温制冷系统Simulink模型Fig.7 Simulink model of cryocooler based on discretized control ratio
将Gz(z)进行Z反变换,离散PI控制算法转化为单片机运行的时域算法

式中 3.006 2为软件62ms采样时间对应离散算法的常数;n为软件第n次算法;x(n)为第n次算法时实际温度数字量与指令的差值;y(n–1)为第n–1次PI数字算法的输出值;y(n)为第n次PI数字算法的输出值。
将式(7)算法代入实际空间低温制冷系统运行,首先输入指令数字量3 780(对应测温二极管1.057V左右,即 80K温度),达到温度稳定后输入数字量70的阶跃信号,测量200s时间内的温度变化情况。实测结果与图7模型的Matlab仿真结果进行对比,如图8所示。
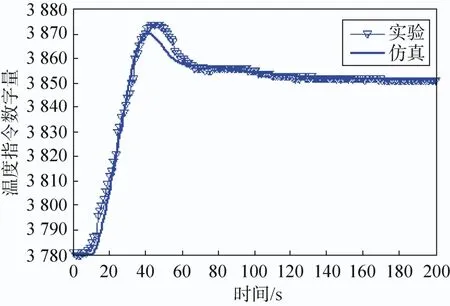
图8 实验与仿真结果对比Fig.8 Contrast between simulated and experimental results
从图8中可以看出,实验和仿真结果吻合较好,上升时间均为40s左右,收敛时间均为120s左右。但实际超调量比仿真结果稍大,其主要原因是:1)采用阶跃响应法进行系统辨识的精度不高;2)测试采样系统的周期为 1s,对于被控对象的高频部分时间分辨率较低,辨识误差较大;3)所采用的空间制冷机输入电压和输出冷量之间存在非线性,导致仿真模型和实际物理模型之间有误差。
4 结论
本文首次提出了一种定量研究低温制冷控制系统的方法,通过在控温点附近输入阶跃信号进行系统辨识的方法得到制冷机分段系统传递函数,然后根据制冷机传递函数进行PI控制算法的参数设计。对理论仿真模型进行了实验验证,结果吻合较好,研究表明:1)空间制冷机的输出温度和输入电压关系可以表示为两个惯性环节串联的二阶系统;2)基于系统辨识的制冷机控制率设计方法可行,该方法可进一步用于深入研究制冷控制算法。
References)
[1]刘兆军, 周峰, 李瑜. 航天光学遥感器对红外探测器的需求分析[J]. 红外与激光工程, 2008, 37(1): 25-29. LIU Zhaojun, ZHOU Feng, LI Yu. Demands Analysis of IR Detector for Space Remote Sensor[J]. Infrared and Laser Engineering, 2008, 37(1): 25-29. (in Chinese)
[2]龙亮, 王世涛, 周峰, 等. 空间红外点目标遥感探测系统在轨辐射定标[J]. 航天返回与遥感, 2012, 33(2): 73-80. LONG Liang, WANG Shitao, ZHOU Feng, et al. In-orbit Radiometric Calibration Methods for Remote Sensing System to Detect Space Infrared Point Target[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(2): 73-80. (in Chinese)
[3]高海亮, 顾行发, 余涛, 等. 星载光学遥感器可见近红外通道辐射定标研究进展[J]. 遥感信息, 2010(4): 117-119. GAO Hailiang, GU Xingfa, YU Tao, et a1. The Research Overview on Visible and Near-infrared Channels Radiometric Calibration of Space-borne Optical Remote Sensors[J]. Remote Information, 2010(4): 117-119. (in Chinese)
[4]王成刚, 东海杰. 超长线列碲镉汞红外探测器拼接方式对比分析[J]. 激光与红外, 2013, 43(8): 920-923. WANG Chenggang, DONG Haijie. Butted Manner Analysis of Long Linear Infrared Focal Plane Detectors of MCT[J]. Laser & Infrared, 2013, 43(8): 920-923. (in Chinese)
[5]朱建炳. 空间深空探测低温制冷技术的发展[J]. 航天返回与遥感, 2010, 31(6): 39-45. ZHU Jianbing. Development of Cryogenic Refrigeration Technology for Deep Space Explorations[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(6): 39-45. (in Chinese)
[6]韦孟柳, 杨开响, 刘冬毓, 等. 80K/2W斯特林制冷机全性能实验研究[J]. 低温工程, 2011(1): 16-31.WEI Mengliu, YANG Kaixiang, LIU Dongyu, et al. Experimental Research of Thermal Performance on 80K/2W Stirling Cryocooler[J]. Cryogenics, 2011(1): 16-31. (in Chinese)
[7]杨雪, 茅年清, 徐圣亚. 制冷机在空间红外遥感领域的应用研究[J]. 真空与低温, 2014, 20(2): 113-124. YANG Xue, MAO Nianqing, XU Shengya. Research of Cryocooler Application in Space Infrared Remote Sensor System[J]. Vacuum & Cryogenics, 2014, 20(2): 113-124. (in Chinese)
[8]贾旭鹏, 姜继善, 于秀明, 等. 斯特林制冷机温度闭环控制系统的探讨[J]. 真空与低温, 2006, 12(3): 176-179. JIA Xupeng, JIANG Jishan, YU Xiuming, et al. Study of Stirling Cryocooler Temperature Closed Loop Control System[J]. Vacuum and Cryogenics, 2006, 12(3): 176-179. (in Chinese)
[9]朱鹏, 傅雨田. 空间用斯特林制冷机的过程控制[J]. 低温与超导, 2011, 39(2): 1-3, 9. ZHU Peng,FU Yutian.Process Control of Space-used Stirling Cryocooler[J]. Cryogenics and Superconductivity, 2011, 39(2): 1-3, 9. (in Chinese)
[10]周芳. 基于DSP的直线电机制冷控制器的研制[D]. 合肥: 安徽理工大学, 2010. ZHOU Fang. Research of Linear Motor Cryocooler Controller Based on DSP[D]. Hefei: Anhui University of Science and Technology, 2010. (in Chinese)
[11]闫涛, 李亚丽, 李建国, 等. 脉冲管制冷机冷却大热容对象的温度控制策略研究[J]. 真空与低温, 2011, 8(1): 76-79. YAN Tao, LI Yali, LI Jianguo, et al. Temperature Control Method Research of Heavy Thermal System Cooled by Pulse Tube Cryocoolers[J]. Vacuum & Cryogenics, 2011, 8(1): 76-79. (in Chinese)
[12]侯森, 王波, 甘智华, 等. 斯特林与脉管制冷机控制系统的研究进展[J]. 低温工程, 2014, 197(1): 6-16. HOU Sen, WANG Bo, GAN Zhihua, et al. Research Progress in Control Electronics for Stirling and Pulse Tube Cryocoolers[J]. Cryogenics, 2014, 197(1): 6-16. (in Chinese)
[13]刘静洁, 李飞艳, 李海英, 等. 变速积分PID控制算法在斯特林制冷机驱控电路上的应用[C]. 第十届全国低温工程大会暨中国航天低温专业信息网2011年度学术交流会, 兰州, 2011. LIU Jingjie, LI Feiyan, LI Haiying, et a1. The Speed Integral PID Control Algorithm in the Application of Stirling Cryocooler Drive Control Circuit[C]. The l0th National Conference on Cryogenic Engineering, Lanzhou, 2011. (in Chinese)
[14]赟高小 , 阎治安, 夏建民, 等. 基于DSP的斯特林制冷机控制系统的研制[J]. 微电机, 2006, 39(5): 29-33. GAO Xiaoyun, YAN Zhian, XIA Jianmin, et a1. Development of a Control System for Stirling Cryoeooler Based on DSP[J]. Micromotors, 2006, 39(5): 29-33. (in Chinese)
[15]黄存坚, 尚群立, 余善恩, 等. 基于阶跃响应二阶加纯滞后模型的系统辨识[J]. 机械制造, 2010, 48(554): 19-21. HUANG Cunjian, SHANG Qunli, YU Shanen, et al. System Identification of Second-order Plus Dead-time Model Based on Step Response[J]. Machinery, 2010, 48(554): 19-21. (in Chinese)
[16]王正林, 郭阳宽. MATLAB/Simulink与过程控制系统仿真[M]. 北京: 电子工业出版社, 2012: 95-103. WANG Zhenglin, GUO Yangkuan. MATLAB/Simulink and Process Control System Simulation[M]. Beijing: Publishing House of Electronics Industry, 2012: 95-103. (in Chinese)
[17]孙启扬, 金占雷, 毛毅华, 等. 基于分段阶跃响应法的制冷系统传递函数辨识[J]. 真空与低温, 2015(5): 307-310. SUN Qiyang, JIN Zhanlei, MAO Yihua, et al. System Identification of Refrigerating System Transfer Function by Partition Step-responsep[J]. Vacuum & Cryogenics, 2015(5): 307-310. (in Chinese)
[18]鄢景华. 自动控制原理[M]. 哈尔滨: 哈尔滨工业大学出版社, 2000: 86-89, 142-143. YAN Jinghua. Auto-Control Theory[M]. Harbin: Harbin Institute of Technology Press, 2000: 86-89, 142-143. (in Chinese)
Cryocooler Control Algorithm Design Method Based on System Identification
JIN Zhanlei SUN Qiyang ZHANG Xinyu ZHOU Feng
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
A novel cryocooler control algorithm design method based on system identification is proposed for improving debug efficiency and control effect. Firstly, thermal leakage of cryocooler-dewar module round 80K control point is analyzed; the results indicate that thermal leakage round 80K is almost the same, and the cryocooler model can be identified by classical step-response method. Then step driving signal is added to the cryocooler to get the system response results, and the cryocooler transfer function model is identified by Matlab system identification toolbox. Next, PI control algorithm is designed in response to control target and cryocooler transfer function, and then control impact analysis is done with variable control algorithm parameters. Finally, control algorithm is digitalized to be used in microcontroller. Experimental verification proves the correction of system identification result and the feasibility of cryocooler control algorithm design based on system identification. Deeply control algorithm research shall be done to improve debug efficiency and control effect.
cryocooler; step response; system identification; control algorithm; infrared remote sensing
TP722.5
: A
: 1009-8518(2016)01-0048-07
10.3969/j.issn.1009-8518.2016.01.006
金占雷,男,1980年生,博士,2008年毕业于哈尔滨工业大学仪器科学与技术专业。高级工程师,主要从事制冷控制技术、遥感器电子学技术研究。E-mail:jinzhanlei@163.com。
(编辑:夏淑密)
2015-08-11
国家重大科技专项工程
猜你喜欢
低温工程(2022年6期)2022-01-01
茶叶(2021年1期)2021-04-13
汽车维修与保养(2021年11期)2021-03-11
上海航天(2021年1期)2021-03-04
石油化工建设(2020年1期)2020-08-24
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
舰船电子工程(2019年9期)2019-09-27
中国医药科学(2017年14期)2017-08-17
中国医学创新(2017年6期)2017-04-05