
并联式大型法兰对接平台的位姿逆解
2016-02-05 05:38杨修伟
工程与试验 2016年4期
杨修伟,黄 磊
(大连理工大学机械工程学院,辽宁 大连 116024)
并联式大型法兰对接平台的位姿逆解
杨修伟,黄 磊
(大连理工大学机械工程学院,辽宁 大连 116024)
针对六自由度并联机构实现大型法兰自动对接的问题,对并联机构的位姿逆解展开研究。根据动静平台各球铰坐标及法兰的位姿参数推导出各伸缩杆长度。利用Simulink搭建平台的运动仿真模型,输入横荡、纵荡、垂荡、横摇、纵摇、艏摇参数,得到6个伸缩杆的变化规律曲线,为进一步的运动学分析奠定基础。
大型法兰;并联机构;仿真模型;位姿逆解
1 引 言
并联机构是由动平台和静平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,是由并联方式驱动的一种闭环机构,具有工作空间小、刚度大、无累计误差、精度高、结构紧凑、承载能力强等优点[1]。其中,应用最广的是六自由度运动平台,由上平台、下平台、6个伸缩杆和球铰组成,可以实现横荡、纵荡、垂荡、横摇、纵摇、艏摇6个自由度运动,广泛应用于飞机装配、宇航对接等大部件对接装配领域。
目前,对并联机器人的研究主要集中在以下几个方面:运动学分析,如位姿反解与正解;动力学分析与控制;机构性能分析,如奇异形位分析,误差分析与补偿;工作空间与灵活度分析;并联机构设计与应用等[2]。本文主要针对并联机构的位姿反解问题展开研究,首先分析该结构形式的特点,推导运动学反解方程,并利用Simulink模块搭建反解模型,在输入6个位姿参数的前提下,输出并联机构的6个伸缩杆长度随位姿参数的变化规律曲线。
2 六自由度大型法兰对接平台模型构建
在同一坐标系下,利用关节臂测量机,在待对接大型法兰端面、柱面及螺栓孔内表面获取若干空间点坐标,求解法兰圆心坐标、法矢向量和对应螺栓孔与端面圆心连线矢量3个位姿矢量信息,以此建立位姿数学模型。以静法兰为目标位姿,求解动法兰的位姿相对调整参量,包括分别沿XYZ方向的平移量,分别绕XYZ轴的转动量,其中动法兰安装于六自由度并联平台,如图1所示。
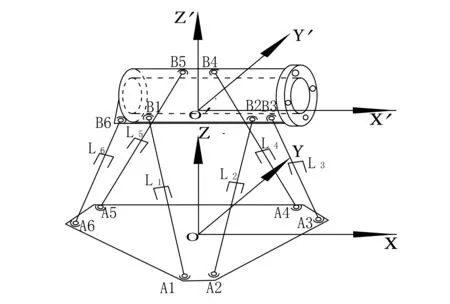
图1 动法兰与六自由度并联平台
六自由度运动平台的俯视图如图2所示。

图2 六自由度运动平台俯视图
该六自由度并联平台由上平台、下平台、液压伸缩杆L1-L2,球铰A1-A6分布在静平台上以半径为R1的球铰外接圆上,球铰B1-B6分布在动平台上以半径为R2的球铰外接圆上,并分别以静平台和动平台的外接圆圆心为原点建立坐标系OXYZ,O′X′Y′Z′。分析可知,动法兰和动平台坐标系O′X′Y′Z′位姿变化有等效性,故只需分析动坐标系的位姿变化。
静平台球铰点在坐标系OXYZ下的坐标矩阵:

动平台球铰点在坐标系O′X′Y′Z′下的坐标矩阵:
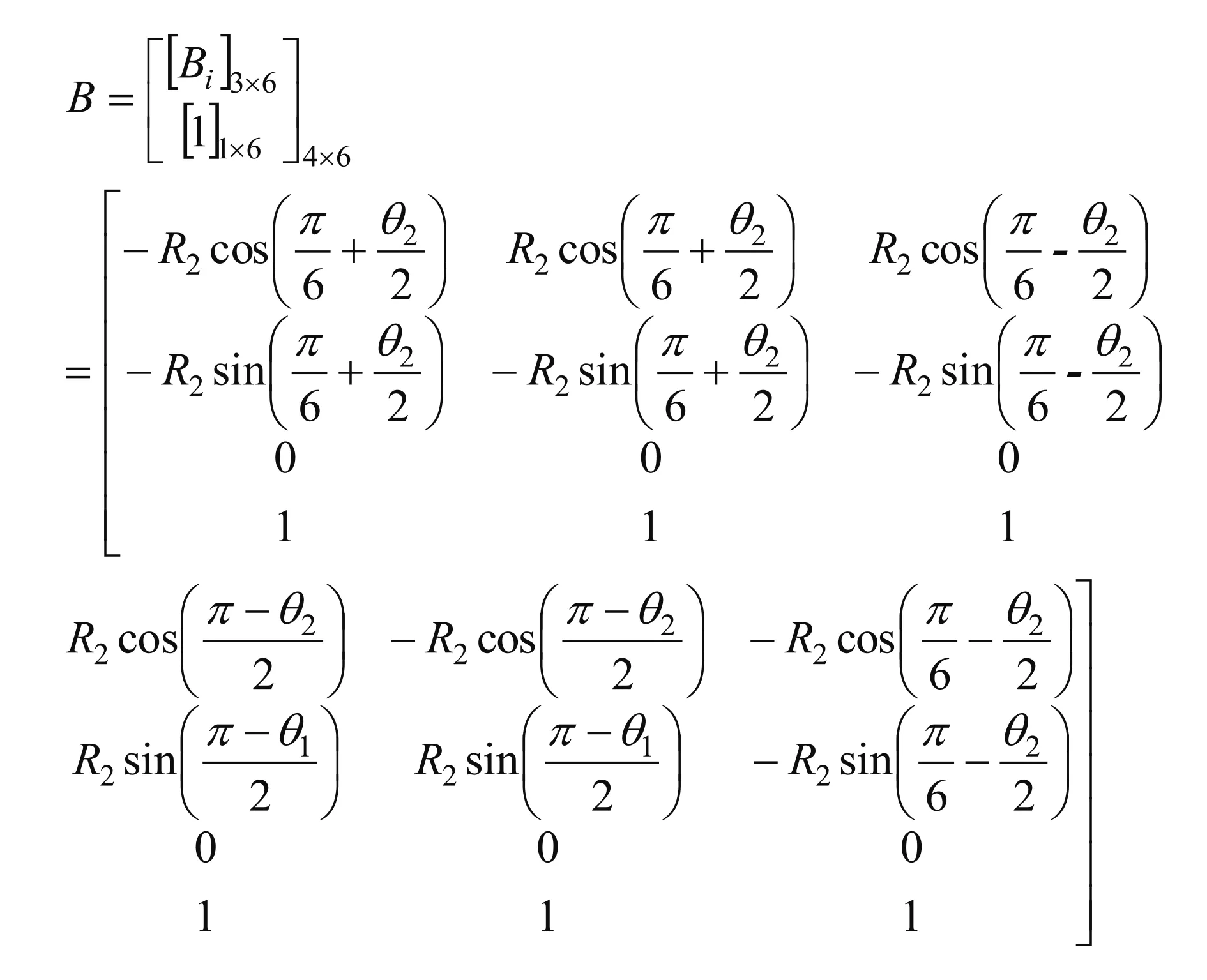
设动平台坐标系O′X′Y′Z′的原点在坐标系OXYZ下的坐标为(x,y,z)、且坐标系O′X′Y′Z′的当前姿态是从坐标系OXYZ的姿态出发,依次绕X′轴,Y′轴,Z′轴分别旋转α,β,γ得到,则静平台与动平台的位姿转换矩阵为:

若点P在静平台坐标系下的坐标为P1(x1,y1,z1),在动平台坐标系下的坐标为P2(x2,y2,z2),则坐标关系为R1=RP2,故动平台球铰坐标在静平台坐标系下的坐标为B′=RB。静坐标系下,伸缩杆两端球铰的相对坐标为C=B′-A。该平台伸缩杆变化量为:
i=1,2,3,4,5,6
其中,该平台初始时伸缩杆长度为L。
3 并联机构位姿逆解仿真分析
以MATLAB里的Simulink功能搭建位姿逆解仿真模型,如图3所示。
仿真模型利用的基本参数如下:静平台半径0.8m,动平台半径0.6m,伸缩杆初始长度L=1m,下
平台伸缩杆夹角θ1=10°,上平台伸缩杆夹角θ2=5°,沿X,Y轴的平移输入量为正弦函数波,其峰值为0.2,频率为0.125Hz,相位为0;沿Z轴的平移输入量为余弦函数波,其峰值为1,频率为0.0125Hz;绕X,Y,Z轴的旋转输入量为正弦函数波,其峰值为20,频率为0.0125Hz。得到L1-L6的位移变化曲线,如图4所示。

图3 仿真模型搭建
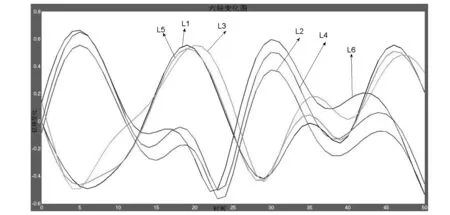
图4 L1-L6的位移变化曲线
4 结 论
本文针对大型法兰利用并联机构对接的问题,
建立了并联机构的位姿逆解模型,推导出六轴位移变化公式,通过仿真分析验证算法的可行性,并在6个位姿参数同时输入的条件下,得出液压伸缩缸的变化规律曲线,为并联机构的位姿逆解分析及进一步的运动学分析奠定基础。
[1]张尚盈,赵慧,韩俊伟.六自由度运动平台实时控制的正/反解算法[J].机床与液压,2003,(03):133-135,123.
[2]陈学生,陈在礼,孔民秀.并联机器人研究的进展与现状[J].机器人,2002,(05):464-470.
Pose Inverse Solution of Butt Joint Platform for Large Flange
Yang Xiuwei, Huang Lei
(School of mechanical engineering, Dalian university of Technology, Dalian 116024, Liaoning, China)
Aiming at the problem of using parallel mechanism with six degrees of freedom to realize the automatic butt joint of large flange, the pose inverse solution of parallel mechanism is studied. According to the coordinates of spherical hinge and the pose of flange, the length of the telescopic rod is derived. Using Simulink to build the simulation model of platform, then the parameters of sway, surge, heave, roll, pitch and yaw are input to get the curve of six telescopic rods. The research provides intuitive reference for the inverse solution of the parallel mechanism.
large flange; parallel mechanism; simulation model; pose inverse solution
2016-08-01
杨修伟,男,山东省沂南县人,大连理工大学硕士研究生,研究方向:机电一体化,机械设计及理论。
TH113.2+2
B
10.3969/j.issn.1674-3407.2016.04.001
猜你喜欢
光学精密工程(2022年22期)2022-11-28
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
中学数学教学(2019年3期)2019-06-21
制造技术与机床(2018年11期)2018-11-23
中等数学(2018年8期)2018-11-10
中学数学杂志(高中版)(2018年1期)2018-01-27
湖北工业大学学报(2016年5期)2016-02-27
海军航空大学学报(2015年1期)2015-11-11
