身体意象可塑吗?
——同步性和距离参照系对身体拥有感的影响*
2016-02-01 09:18张静陈巍
心理学报 2016年8期
张 静 陈 巍
(1杭州电子科技大学心理健康研究所, 杭州 310018) (2荷兰莱顿大学脑与认知研究所, 莱顿 2333 AK)(3绍兴文理学院心理学系, 绍兴 312000) (4浙江大学语言与认知研究中心, 杭州 310028)
1 引言
在当前认知科学的实验范式中, 身体意象(body image)是由一系列与身体有关的知觉、态度及信念所构成。作为意识层面上对“我”的身体应该是“如何”的一种表征, 它所表征的是主体对自己身体大小、形状以及与众不同的特点所感知到的形式(例如, 从监视器视频中认出“我自己”) (de Vignemont,2010; Gallagher, 2005; Gallagher & Meltzoff, 1996)。身体意象的确认依赖于一类更为精细的具身体验——“拥有感” (sense of ownership), 即“我”是那个拥有身体的某个部分或正在经历某种体验的人的感觉(de Vignemont, 2011; Maister, Slater, Sanchez-Vives,& Tsakiris, 2015)。
虽然身体意象一直被认为是后天在与环境的交互作用中不断发展的(De Vignemont, 2010; Gallagher,2005), 但很多研究者认为成年人的身体意象是相对稳定的, 并且在我们的认知活动过程中发挥着重要作用。异常的身体意象往往是与某些躯体障碍或神经精神疾病有着某种程度的联系。例如, 神经性厌食症(anorexia nervosa, AN)、异己手综合征(alien hand syndrome, AHS)、假肢妄想症(somatoparaphrenia)以及身体整合意象障碍(body integrity image disorder,BIID)等(Ramachandran, Brang, McGeoch, & Rosar,2009; Tsay, Allen, Proske, & Giummarra, 2015)。来自后天截肢病人对幻肢上产生的触觉(包括痛觉与痒觉等)的临床报告进一步确认了成人身体意象所具有的稳定性(Ramachandran, Rogers-Ramachandran,& Cobb, 1995)。然而, 随后相关领域中的大量实验证据显示, 后天截肢病人在接受诸如运动想象(motor imagery)、镜像视觉反馈训练(mirror visual feedback treatment, MVFT)等学习与训练后, 幻肢体验能够被纠正, 随附的痛觉体验会得到缓解(Giummarra et al., 2010)。近来甚至有研究发现, 先天患有海豹肢畸形症(phocomelus)的患者, 也可以通过镜像视觉反馈训练逐渐获得完整的幻手指体验(McGeoch &Ramachandran, 2012)。这些研究不仅质疑了身体意象的稳定性, 甚至对身体意象是否存在提出了科学挑战。身体意象究竟是稳定的、不变的?还是可塑的?如果它具有可塑性, 那么它的变化是否会影响拥有感?对这个问题的讨论与检验引发了新一轮的热议。其中, 橡胶手错觉(rubber hand illusion)研究范式在该主题的研究上扮演了重要的角色(Farmer,Tajadura-Jiménez, & Tsakiris, 2012; Guterstam, Gentile,& Ehrsson, 2013; Carruthers, 2013)。
橡胶手错觉是一种将人造的橡胶手感受为自己真实身体一部分的知觉体验。该错觉最初是由认知心理学家Botvinick和Cohen等发现的。他们将一只橡胶手置于被试面前, 同时将被试相应的左手或右手隐藏于其视线之外。当真手和橡胶手同时被两把一样的刷子轻刷10分钟后, 被试的主观报告显示他们会将橡胶手感受为自己身体的一部分。同时本体感觉偏移(proprioceptive drift)测量结果也显示被试在判断自己真手位置的时候会出现往橡胶手所放置位置的偏移(Botvinick & Cohen, 1998)。类似的错觉同样存在于将橡胶手替换为他人的脸时(Tsakiris, 2008); 将橡胶手替换为人的整个身体时(Petkova et al., 2011); 以及在虚拟环境中呈现橡胶手时(Sanchez-Vives, Spanlang, Frisoli, Bergamasco,& Slater, 2010)。
围绕橡胶手错觉所展开的一系列研究表明时间一致性、空间一致性以及特征一致性是影响错觉产生的主要因素。时间一致性是指必须尽可能让两把刷子同时刷被试可见的橡胶手和不可见的真手(Shimada, Fukuda, & Hiraki, 2009); 空间一致性是指橡胶手与被试的真手所放置的位置要尽可能接近, 超过一定距离后错觉程度会显著下降甚至消失(Lloyd, 2007); 特征一致性则是指橡胶手所呈现的样子与被试真手之间的差异不能过大(Guterstam,Petkova, & Ehrsson, 2011; Tsakiris & Haggard, 2005)。之所以会出现这些现象, 研究者认为是因为同步的多感官刺激会导致自我−他者的融合(self-other merging) (Paladino, Mazzurega, Pavani, & Schubert,2010), 以至于中央神经系统将外部对象即橡胶手归类为身体的一部分(Haans, Kaiser, Bouwhuis, &IJsselsteijn, 2012), 而之所以空间原则和特征原则特别重要则是因为身体意象在其中扮演的重要作用(Davies, White, & Davies, 2013; Suzuki, Garfinkel,Critchley, & Seth, 2013)。具体而言, 时间一致性所代表的是自下而上(bottom-up)的加工机制对身体拥有感的影响。即, 输入反馈总是让虚拟手和被试的真手保持同步会让人更容易产生错觉, 反之更不容易。与之相对, 空间一致性和特征一致性则表明了自上而下(top-down)的加工机制的影响。即, 对于“我的手应该是怎么样的” (如形态与尺寸)或“我的手通常在什么位置” (如不能位于解剖学上不可能的位置)被试有着较为稳定的内部表征。当外界输入与之相匹配时, 更容易对虚拟手产生拥有感错觉体验, 反之更不容易(张静, 李恒威, 2016)。视觉−触觉输入与被试原有的身体意象越接近时越容易让人产生更强、更稳定的错觉(Hohwy & Paton,2010)。即外部对象想要被表征为身体的一部分必须尽可能与原有的身体意象保持一定的相似性, 因此我们在对自我进行识别和表征时所采取的是一种基于稳定的身体意象的一种自上而下的策略似乎顺理成章。
然而, 并不是所有研究都与此一致。除了同步性之外, 均有研究结果不支持空间一致性与特征一致性的假设。已有的研究发现只要同步性存在, 即便真手和橡胶手之间的距离增加至远大于之前研究所给出的27.5 cm, 拥有感错觉依旧存在(Zopf,Truong, Finkbeiner, Friedman, & Williams, 2011)。对于真假手之间距离的影响, Armel和Ramachandran(2003)的研究甚至发现, 当橡胶手被移至距离被试真手3英尺(约91 cm)的位置时, 拥有感错觉仍能产生。他们的研究还发现, 即便是不放置橡胶手, 面对光秃秃的桌面被试仍报告说他们能感到触觉是位于桌面上的。并且, 当被试真手和桌面上都贴有创可贴的情况下, 撕掉桌面上的创可贴的时候, 皮肤电传导反应(skin conductance response, SCR)能监测到被试情绪的变化, 可见这种情况下被试仍会产生对桌面的拥有感。此外, Ma和Hommel (2015)基于虚拟手错觉范式的研究也表明, 被试会对虚拟气球和木块产生拥有感。据此, 他们指出身体意象是可变的, 人脑在识别并纠正感官输入方面具有惊人的能力。甚至, 即使研究者用刷子在被试身体的不同部位刷过, 而被试透过显示器中看到的仅仅是刷子同步在空气中的相应部位划过, 只要触觉和视觉体验之间保持同步性, 后者也会对根本不存在任何物体的空间产生强烈的身体拥有感错觉(Guterstam,Abdulkaraim, & Ehrsson, 2015)。这些实验证据暗示了个体拥有感的产生并不需要依赖于预先存在的身体意象。在经历几分钟同步的视触刺激后, 个体便能产生对橡胶手的拥有感。这与Ramachandran等(1996)基于幻肢病人所开展的研究所得出的理论假设相一致:身体意象只是一种幻觉, 它是大脑为了统一和方便而建构出来的。因此, 较之基于身体意象的自上而下的解释机制, 或许基于贝叶斯逻辑(Bayesian logic)的自下而上的匹配过程更适合。
综上可见, 当前橡胶手等相关错觉研究的结果或者肯定了身体意象作为一种稳定的内部表征而在拥有感体验中所发挥的作用, 或者发现影响拥有感体验的因素似乎并不是那么稳定, 暗示着身体意象存在的可塑性。近期, Friston等基于贝叶斯推理提出并论证的脑的自由能量原理(free-energy principle)或最小震惊原理(minimal surprise principle)(Friston & Stephan, 2007; Friston, 2010; Friston et al.,2015)为整合上述两种加工机制提供了新的视角。该理论认为生物自主体(agent)的大脑是一个热力学系统, 自由能量类似于“熵能” (entropy energy)。其工作原理遵从贝叶斯预测的最优化, 从而以一种尽可能减少对环境的预测错误(prediction errors)方式保持热力学平衡。自由能量总是流向这一目标,从而迫使自主体通过作用于环境改变输入, 或通过更新内部表征对输入信息的评估来减少来自环境意外事件的不确定性并避免出现震惊。据此, 橡胶手错觉与视错觉、幻肢现象一样都是脑为了保持热力学平衡而更新的内部表征(Brown, Adams, Parees,Edwards, & Friston, 2013; De Ridder, Vanneste, &Freeman, 2014)。身体意象具有一定的先验(a priori)内部表征形态, 又具有相当程度的可塑性。
为了考察空间一致性与时间一致性的交互作用及其对于身体拥有感的影响, 进而检验身体意象的可塑性, 我们试图通过改变知觉体验的环境来加以研究。情境参照系的引入是其中的一种做法。例如, Costantini和Haggard (2007)发现改变人手的位置使其与橡胶手的位置不一致对拥有感的影响很小, 但改变橡胶手的位置使其与真手位置不一致却会大幅度降低被试的拥有感体验程度, 因此他们认为只要两只手上的刺激在以手为中心(hand-centered)的空间参照系(reference frame)中一致就会产生拥有感错觉。值得一提的是, 除了橡胶手错觉作为当前对身体拥有感进行研究的主要范式外, 虚拟手错觉作为橡胶手错觉的一个虚拟现实的版本在同类研究中已有严谨的理论设想、技术支持与操作实例(Ma & Hommel, 2013; Zhang & Hommel, 2015)。虚拟手错觉实验中, 被试可以通过移动自己的手来控制电脑呈现的虚拟手的运动, 当虚拟手的运动和真手运动同步时, 被试会报告感受到了一种强烈的对虚拟手的拥有感。相较于橡胶手错觉对视触同步性的高度依赖, 虚拟手错觉中预期状态和实际状态反馈之间的一致性至关重要。众多虚拟手错觉的研究表明, 作为橡胶手错觉的变式, 虚拟手错觉与橡胶手错觉等发生机制类似(尽管并非完全一致), 能够产生与橡胶手错觉类似的效果, 且在同步性等变量等控制上更为精确。此外, 基于两者所开展的研究也具有一定的可比性, 这使得虚拟手错觉成为当前广受青睐的用以研究拥有感错觉体验的范式之一(Christ & Reiner, 2014; Ma & Hommel, 2013)。
我们以虚拟手错觉为研究手段, 以空间一致性为切入点, 在实验1中考察以同步性和绝对距离为自变量分别考察自上而下的身体意象和自下而上的刺激匹配对拥有感体验的影响。尽管以往橡胶手错觉研究中已有对同步性和距离因素的影响进行探讨的研究, 但是基于大量橡胶手错觉研究结果表明不同实验设置条件下可能出现的结果偏差, 故而有必要在我们的虚拟手设置中对同步性和距离的影响进行检验, 同时也为实验2中参照系的影响提供一个可供比较的水平。在实验2中引入距离参照系, 即相对距离, 设置“先近后远”和“先远后近”两种条件探究其对拥有感体验的影响。基于以往的相关研究我们发现, 尽管大部分情况下拥有感错觉程度都会随着真假手之间的绝对距离的增加而减少,即受绝对距离的影响, 但是也存在一些例外(Armel& Ramachandran, 2003; Zopf, Savage, & Williams,2010)。一方面, 实验设置的不同版本可能会导致一些偏差, 但另一方面, 这些发现也说明可能还存在空间相对参照系的影响。本研究通过2个实验, 试图解决以下两个问题:(1)自上而下的身体意象与自下而上的刺激匹配何者对拥有感体验更重要?(2)知觉环境, 即距离参照系是否会对同一位置对虚拟手拥有感体验产生影响, 即相对位置的影响是否大于绝对位置的影响?最终通过这两个问题的研究来揭示虚拟手错觉中身体意象的可变性。
2 实验1
2.1 实验目的和假设
实验1在虚拟环境中, 模拟经典橡胶手错觉,分别以虚拟手距离被试的绝对距离和真手和虚拟手之间的同步性为自变量, 考察其对拥有感错觉程度的影响。基于以往研究, 错觉的产生与否受真手和虚拟手之间相似程度(包括距离远近)以及两者运动同步性的影响(Ehrsson, 2012; Lloyd, 2007)。前者代表的影响被解释为自上而下的影响, 而后者代表的影响则是自下而上的影响。如果较之不同步的情况, 真假手之间的距离越近越能产生拥有感错觉,说明自上而下的身体意象在影响知觉体验; 如果视觉−触觉刺激同步时, 拥有感错觉更强烈, 意味着自下而上的匹配同样不可或缺。
2.2 研究方法
2.2.1 被试
128名荷兰莱顿大学(Leiden University)的在校国际学生自愿参加本实验。所有被试之前均未参加或听说过橡胶手/虚拟手错觉的研究。所有被试均为右利手, 且裸眼视力或矫正视力正常。本研究经学校相关心理研究道德委员会(Psychology Research Ethics Committee, PREC)审批通过。书面的实验告知书会在实验开始之前给被试过目并获得被试口头及书面签字确认后正式进入实验阶段。实验结束后被试可自行选择获得实验学分或现金作为报酬。
2.2.2 实验设备及材料
本实验在虚拟实验室中进行, 实验设备包括方位追踪仪(orientation tracker, InterSense)、数据手套(dataglove)以及投影仪。实验控制程序通过虚拟现实软件(virtual reality software, Vizard)编写。被试戴上数据手套及方位追踪仪之后, 与其真手有关的信息会实时传至后台控制程序, 通过实验程序所设定的同步或者不同步的刺激也能够通过数据手套作用在被试的真手上。虚拟手呈现在被试面前的投影仪上, 根据程序设定而出现在不同的位置(近或远)。
采用拥有感问卷来评估被试的错觉体验程度。实验中我们所采用的问题根据以往橡胶手错觉和虚拟手错觉研究中的相关问题改编而成(Botvinick& Cohen, 1998; Kalckert & Ehrsson, 2014; Ma &Hommel, 2013; Zhang & Hommel, 2015)。因被试为来自不同国家的留学生, 故实验中所采用的问卷为英文版。其中问题1~5为拥有感体验问题, 即问题本身即可反映拥有感的不同程度。问题6~9为拥有感控制问题, 这些问题与拥有感体验问题类似, 但并不会受自变量的影响而在不同条件下有显著差异。问卷采用Likert量表法进行计分, 所有问题都含有从0(非常不同意)到6(非常同意)7个等级。最终的拥有感得分统计问题1~5的平均分, 而问题6~9则用于检验本实验设置是否能有效地对因变量的影响加以研究。
2.2.3 实验设计和程序
本实验为2×2被试间设计。两个自变量分别是视觉刺激和触觉刺激的同步性(包含同步、不同步两个水平)以及真手和虚拟手之间的距离(包含近、远两个水平)。每个被试被随机分配至4个序列的其中之一进行实验。
实验正式开始之前主试为被试的右手戴上数据手套与方位追踪仪并引导被试在正对着投影仪的椅子上坐下。被试前方的桌子上有一个特制的黑色箱子用于遮挡被试的视线以保证在实验过程中被试无法看到自己戴着手套的右手。实验过程中被试需将戴着数据手套和方位追踪仪的右手掌心朝上放置于特制的黑箱子内的特定位置, 并尽量保持静止不动(如图1A所示)。
实验中屏幕上的虚拟手可能位于被试的视线正前方, 真手与虚拟手的中指位于同一切面上(近);也可能位于距离被试真手正前方44 cm的位置(远)(如图1B)。实验过程中被试会看到一个小球在被试的掌心上下跳动, 视触同步的情况下当小球触及虚拟手时在被试的真手上也同时产生振动触觉; 视触不同步的情况下振动触觉在小球跳至最高点时而不是在小球碰到虚拟手时产生。整个视触体验的呈现时间为96 s, 其中小球从最高点下落到掌心和从掌心回升到最高点的时间各为4 s。同步或不同步条件下每次振动触觉的持续时间均为1s。最终的四个序列分别是:虚拟手出现在被试正前方, 视觉刺激和触觉刺激同步; 虚拟手出现在被试正前方, 视觉刺激和触觉刺激不同步; 虚拟手出现在距离被试很远的位置, 视觉刺激和触觉刺激同步; 虚拟手出现在距离被试很远的位置, 视觉刺激和触觉刺激不同步。
实验过程如图2所示。
2.3 实验结果
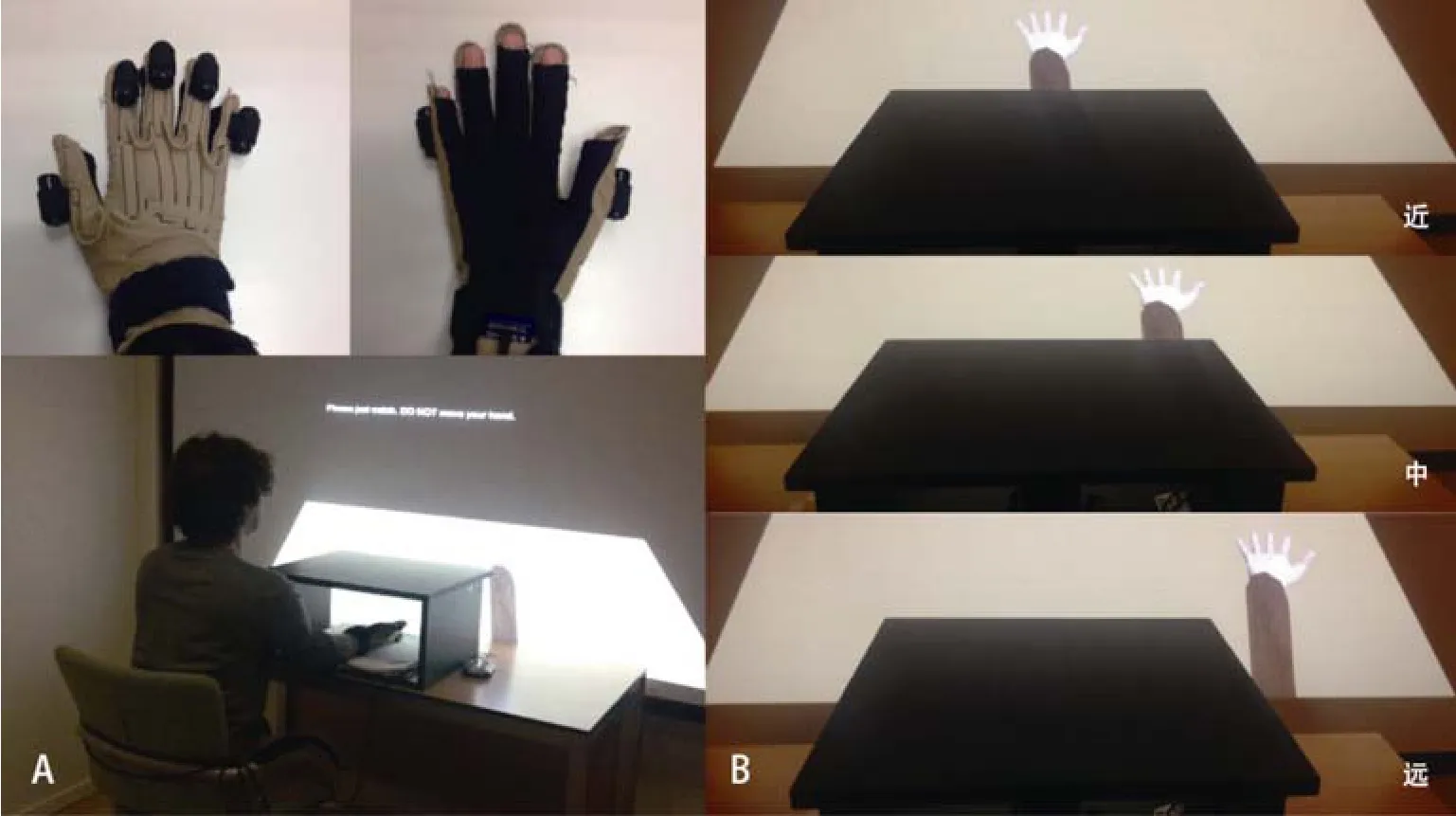
图1 实验设备及条件设置效果
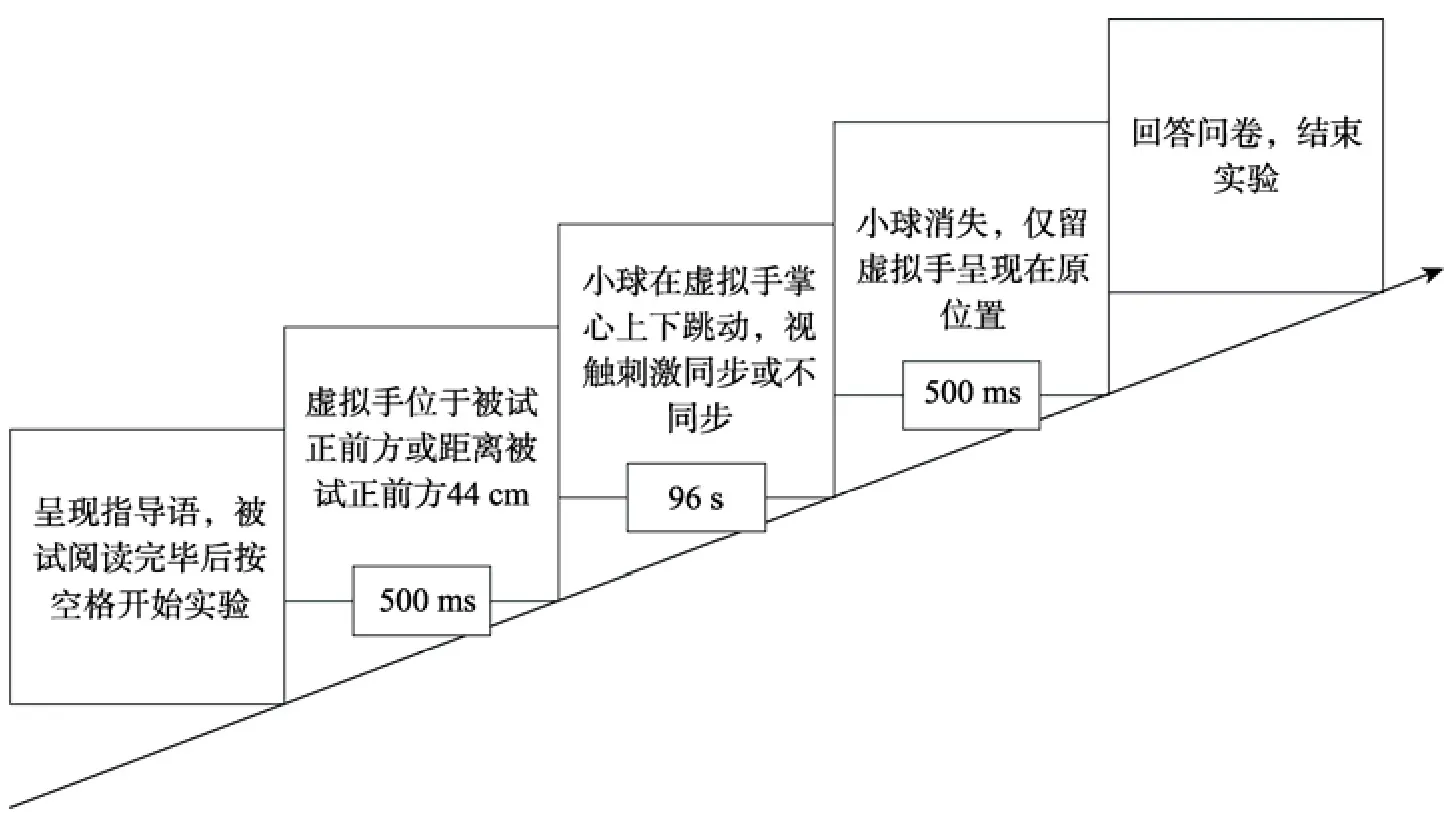
图2 实验1流程图
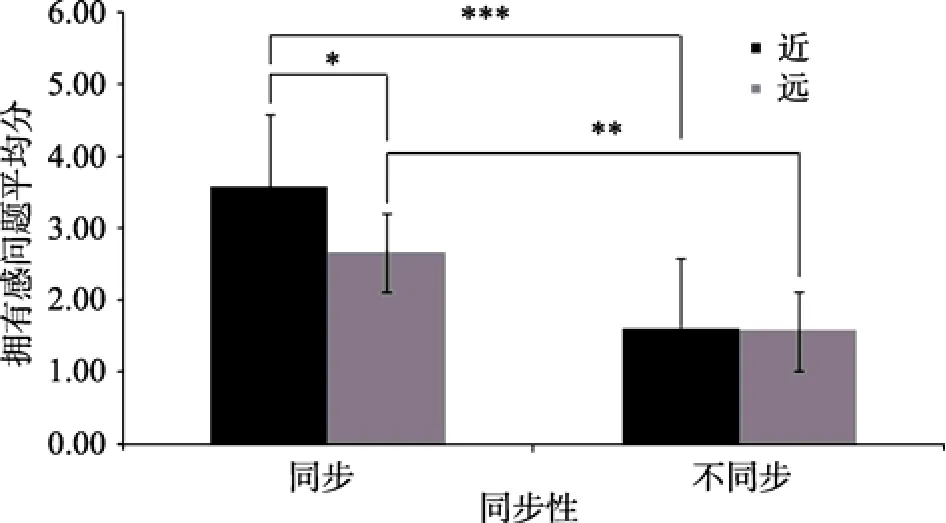
图3 实验1拥有感问题得分情况。误差线为标准误。
对问卷中拥有感控制问题(Q6~Q9)的分析显示无论是距离、同步性的主效应亦或是交互作用对其影响都不显著。这一结果同样与以往研究一致。拥有感控制问题是指与知觉到的拥有感有关的过程或现象, 且问题本身在表述上与拥有感问题类似,但它们并不与拥有感体验直接相联系。控制问题在不同处理条件下的得分差异不显著说明问卷中所选用的拥有感问题是有效的, 即不同处理条件影响的只是被试的拥有感体验而非其它。
2.4 讨论
实验1的结果证实了我们的假设, 即同步性和真假手之间的距离均会对最终的拥有感体验产生不同的影响。即无论距离远近, 当视触刺激同步出现时, 被试都会对投影上的虚拟手产生较之视触刺激不同步时更强的拥有感; 并且, 无论同步与否,当虚拟手出现在离被试较的位置时, 被试也会对虚拟手产生较之较远情况下更强的拥有感。这一结果说明:
首先, 本虚拟手实验与以往主张自上而下的加工影响拥有感错觉产生的研究在某些方面得到的结论是一致的。在绝对条件下, 无论是自上而下的身体表征还是自下而上的同步刺激都会对最终的拥有感错觉产生决定性的影响。即证实了时间一致性和空间一致性的影响。空间一致性是否可以成为影响橡胶手错觉产生的必要条件并不像时间一致性的影响那样广受认可, 事实上对空间一致性的影响一直以来都存在较大的争议。即便暂且不去深究到底是实验设置不一致还是因变量不统一等原因造成不同研究之间的出入, 但是根据实验1的结果至少能够说明这一实验设置与身体意象支持者的实验设置之间的相似性与可比性。
其次, 尽管绝对距离与同步性对拥有感的影响差异均显著, 但较之同步性的影响, 绝对距离的影响仍然有所不同。同步性的影响要大于绝对距离的影响。无论虚拟手与被试之间的绝对距离是远还是近, 同步的视触刺激总是要比不同步的视触刺激条件产生更强的拥有感; 但绝对距离的影响只有在视触刺激同步的情况下才有显著差异, 即当视触刺激同步时, 较之远处的虚拟手, 近处的虚拟手会让被试体验到更强的拥有感。但当视触刺激不同步时,无论远近被试所体验到的拥有感程度都会比较弱。换言之, 纵使虚拟手距离被试很远时, 只要同步的视触刺激存在, 被试也不会体验到特别强烈的虚拟手不属于身体一部分的感觉, 但是如果同步的视触刺激小时, 即便虚拟手出现在眼前, 被试也无法体验到较强的拥有感。这一结果和已有的基于橡胶手错觉的研究结果一致(Kalckert & Ehrsson, 2014),同时也符合Tsakiris (2010)所提出的理论解释, 即拥有感知觉的其中一个评判标准就是作为当前感官输入和身体相关的相对参照系之间进行比较的结果而出现的。实验2的主要目的就是考察不同距离参照系情况下被试对出现在同一位置虚拟手的拥有感体验。
3 实验2
3.1 实验目的和假设
实验1不仅证实了绝对距离和同步性对拥有感错觉体验的影响, 同时也说明了我们的实验设置能够很好的重现经典橡胶手错觉并与之具有可比性。但正如我们在引言部分所述, 为了探索身体意象存在可变的可能性, 实验2我们需要引入相对距离,即研究不同知觉环境下的拥有感体验。实验2仍在与实验1相同的虚拟环境中以模拟经典橡胶手错觉的方式进行。但实验2中引入了以往研究不曾使用过的距离参照系作为变量, 考察同步性和距离参照系对拥有感错觉程度的影响。我们分别选择实验1中的两个位置作为近、远两个位置, 测定被试对位于这两个位置中点的虚拟手的拥有感。实验1中我们以绝对距离考察身体意象对拥有感体验自上而下的影响, 结果表明与正常身体意象越接近的条件越容易引发拥有感错觉。实验2中我们在不同的顺序条件下考察被试对相对位置虚拟手的拥有感体验。如果虚拟手先出现在近处再出现在中点位置与先出现在远处再出现在中点位置这两种条件下的拥有感体验不一样, 说明即便身体意象依旧存在,它在影响知觉体验的过程中的作用也是可变的。
3.2 研究方法
3.2.1 被试
与实验1相同, 实验2的被试也是128名莱顿大学的在校学生, 他们以获取实验学分或现金作为报酬自愿参加本实验。所有被试筛选条件均与实验1相同。实验开始前向被试呈现实验告知书并获得被试口头及书面签字认可后进入正式实验。
3.2.2 实验设备及材料
所用设备与拥有感错觉评估方式也同实验1。
3.2.3 实验设计和程序
本实验为2×2被试间设计。两个自变量分别是视觉刺激和触觉刺激的同步性(包含同步、不同步两个水平)以及距离参照系(包含先近后中、先远后中两个水平)。实验包含4个不同的序列, 每个被试被随机分配至其中之一序列进行实验。
实验正式开始之前主试为被试的右手戴上数据手套与方位追踪仪并引导被试在正对着投影仪的椅子上坐下。被试前方的桌子上有一个特制的黑色箱子用于遮挡被试的视线以保证在实验过程中被试无法看到自己戴着手套的右手。实验过程中被试需将戴着数据手套和方位追踪仪的右手掌心朝上放置于特制的黑箱子内的特定位置, 并尽量保持静止不动。
实验中屏幕上的虚拟手可能先位于被试的视线正前方(近), 也可能先位于距离被试真手正前方44 cm的位置(远), 随后虚拟手会出近、远位置的中点, 即距离被试真手正前方22 cm的位置(中)。视触同步性的控制方式与实验1相同, 即同步的情况下当小球触及虚拟手时在被试的真手上也同时产生振动触觉; 不同步的情况下振动触觉在小球跳至最高点时而不是在小球碰到虚拟手时产生。因此最终的四个序列分别是:虚拟手出现的位置先近后中,视觉刺激和触觉刺激同步; 虚拟手出现的位置先近后中, 视觉刺激和触觉刺激不同步; 虚拟手出现的位置先远后中, 视觉刺激和触觉刺激同步; 虚拟手出现的位置先远后中, 视觉刺激和触觉刺激不同步。
实验过程如图4所示。
3.3 实验结果
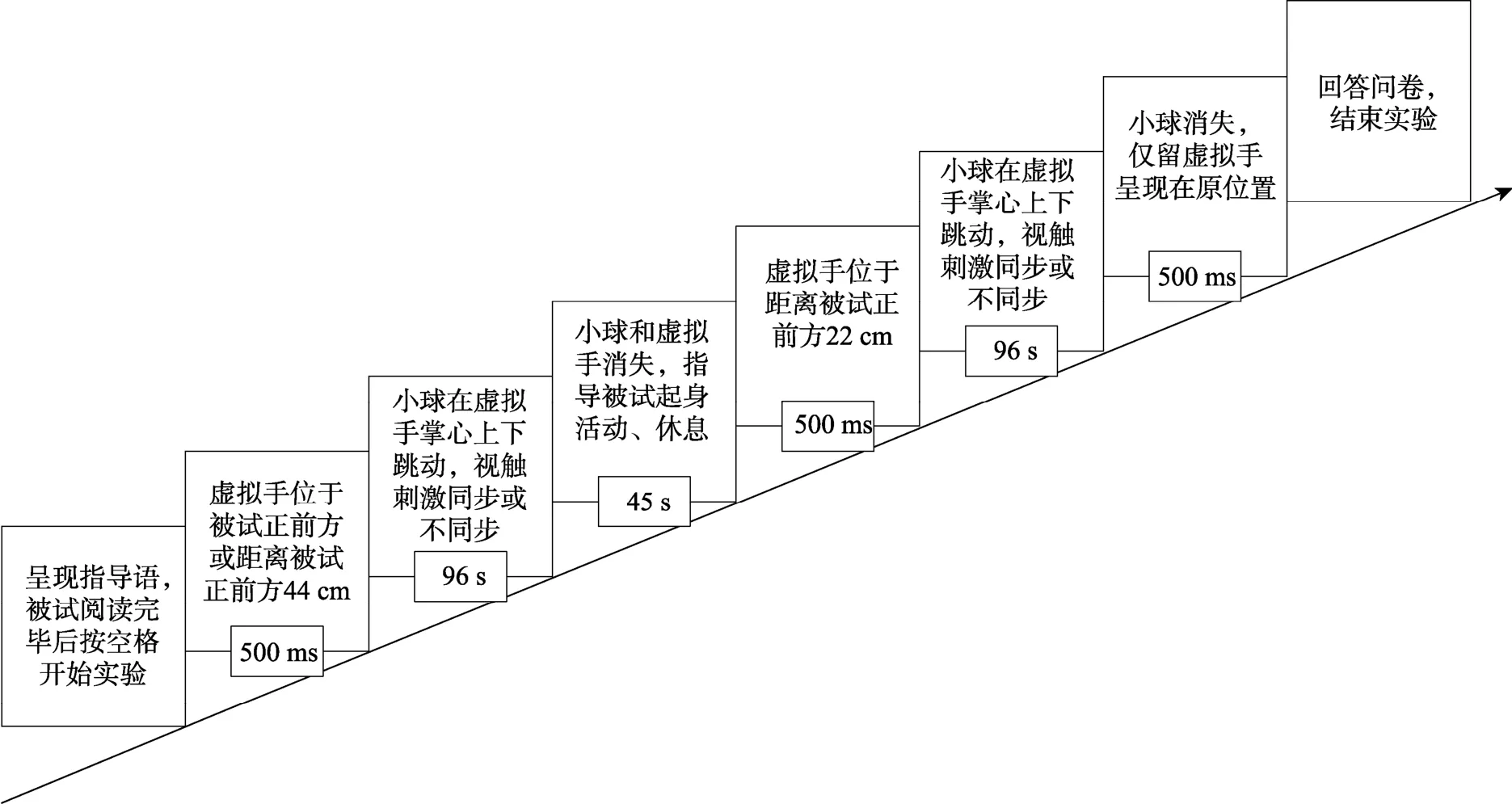
图4 实验2流程图
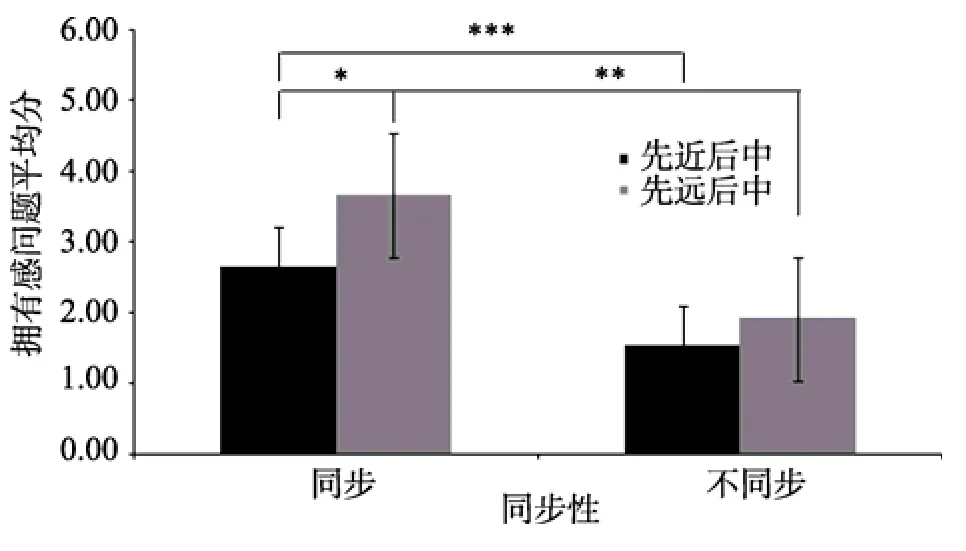
图5 实验2拥有感问题得分情况。误差线为标准误。
3.4 讨论
从实验2的结果可以发现, 同步性的影响依旧存在且无论距离参照系如何变化, 视触同步条件下的拥有感都要显著高于视触不同步条件下的拥有感。并且, 和实验1中的得分情况类似, 较之传统橡胶手错觉的研究, 虚拟手错觉所产生的拥有感体现在问卷评分上要相对较低。但除此以外, 实验2中更有价值的发现是, 即便是对于同一个位置(中)上的虚拟手, 被试也会因为其呈现顺序的不同而产生统计差异显著的不同程度的拥有感体验。
在实验1中通过改变虚拟手呈现在屏幕上的绝对位置发现随着虚拟手与被试之间的距离增加时,拥有感体验会下降, 且两种情况下差异显著。实验2中, 最终考察的是当虚拟手位于实验1近、远两个位置中点的位置上时被试的拥有感体验。如果如实验1所揭示的不同位置的虚拟手会对拥有感产生影响并且这种影响是因为身体意象以一种自上而下的方式在发挥作用, 那么实验2中同一个绝对位置上的拥有感程度应该是相同或至少是相似的。然而在实验2中可以看到, 尽管考察的是同一个位置上的虚拟手错觉的程度, 但是由于不同的呈现顺序,即距离参照系的存在会让个体对同一绝对位置的虚拟手产生不同的拥有感体验。近、中两个位置的比较让中点位置似乎离被试更远, 而远、中两个位置的比较则让中点位置似乎离被试更近。尽管我们不能据此认定身体意象不存在, 但至少可以猜测或许身体意象确实并不是那么稳定, 因此, 当外界信息发生改变时, 身体意象变会发生改变, 从而影响个体对身体拥有感的体验。
4 综合讨论
作为一种能够让正常被试对非自己身体的一部分产生拥有感的实验范式, 橡胶手/虚拟手错觉使得我们对身体意象、自我表征和拥有感等问题进行实证的检验成为可能。经典橡胶手/虚拟手错觉研究发现的空间一致性和特征一致性等影响错觉产生与否的制约因素被认为是稳定的预先存在的身体意象在自我表征过程中发挥作用的证据。然而,随着越来越多的研究揭示出在某些条件下, 不仅位于解剖学上不可能位置的橡胶手会被感受为自己身体的一部分, 甚至虚拟的气球、木块甚至不存在任何物体的空间等也能被感受为自己身体的一部分, 身体意象作为一种稳定不变的存在开始受到质疑。最为极端的主张是Armel和Ramachandran(2003)所提出的“身体意象只是一种幻觉, 它是大脑为了统一和方便而建构出来的”。本研究的主要目的是在虚拟环境中重现橡胶手错觉来探讨身体意象是否稳定以及是否存在, 并主要通过考察以下三方面的内容来试图回答上述问题。
4.1 同步性对身体拥有感的影响
两个实验均显示同步性对身体拥有感的重要性, 无论是虚拟手位于何处、不管是其出现的顺序如何, 视触刺激同步下的身体拥有感都要显著高于视触刺激不同步时对虚拟手的拥有感。这与以往众多的橡胶手/虚拟手错觉研究中所得到的时间一致性原则也是吻合的(Ehrsson, 2012; Tsakiris, Longo,& Haggard, 2010)。并且进一步的简单效应分析发现, 同步性对拥有感的影响不仅在虚拟手离被试近的情况下差异显著, 而且即便当虚拟手离被试很远的时候, 同步性对拥有感的影响依然存在显著差异。此外, 实验2中先近后远和先远后近的条件下,同步性对拥有感体验的影响也分别显著。并且, 较之另一个变量绝对距离或相对距离, 同步性对身体拥有感的影响程度也要更大。本实验中所发现的同步性对身体拥有感的影响也从另一个角度为自下而上的加工方式影响错觉的产生(Tsakiris, Carpenter,James, & Fotopoulou, 2010)提供了佐证。这些结果再次证实了同步性是橡胶手/虚拟手错觉产生的一个必要条件。但同步性的影响是否像贝叶斯逻辑所主张的那样, 只要存在同步的视觉刺激和触觉刺激知觉学习机制便会发生作用, 即同步的视触刺激或同步的视觉运动刺激是身体拥有感错觉产生的充分条件?绝对位置对身体拥有感的影响似乎更支持自上而下的加工起主导作用这一取向。
4.2 绝对位置对身体拥有感的影响
通过分别考察虚拟手位于被试正前方和距离被试很远的屏幕上这两种情况下的身体拥有感体验发现, 无论是否同步, 被试对两种情况下的虚拟手所产生的拥有感程度在统计学上是有显著差异的, 即个体对于越远的虚拟手越不容易对其产生拥有感。但是因为较之绝对位置的影响同步性的影响更强, 因此如果不对是否同步进行区分时, 无论是近处的虚拟手还是远处的虚拟手, 被试对其拥有感的体验都是负值。只有在视触刺激同步且虚拟手位于被试面前的情况才能让人产生相对较强的拥有感。同步性和绝对位置的交互作用显著, 在视触同步的情况下被试对位于不同绝对位置的虚拟手所产生的拥有感体验有较大的差异, 而在视触不同步的情况下被试对不同绝对位置的虚拟手所产生的拥有感体验几乎没有差别, 即当视觉上的接触刺激和手上所感受到的触觉刺激之间有较大的时间间隔时, 无论虚拟手的绝对位置如何, 均不会产生拥有感。可见, 本研究在绝对位置对身体拥有感的影响上所发现的不同位置的显著差异的主效应主要是来源于同步情况下的差异。以往研究在谈论这些影响橡胶手/虚拟手错觉产生的因素时往往喜欢分开讨论, 但是从本研究的结果可以看到, 无论是同步性的影响还是绝对位置的影响都不是孤立地发生作用。这也就引出了下一个需要探讨的问题, 既然这些因素对拥有感的影响同时还受其它因素的影响, 那么如果这些因素本身受到影响也可能会影响身体拥有感。
4.3 相对位置对身体拥有感的影响
同步性和绝对位置分别作为自下而上和自上而下的代表性影响因素, 实验1所揭示出的其对身体拥有感的影响显而易见, 这同时也说明了身体意象是存在的, 或者至少存在某种类似于身体意象的东西以自上而下的方式影响自我表征。然而至此,我们依然好奇的是身体意象是否可变的问题。为了研究影响橡胶手/虚拟手错觉产生因素本身受到影响时会对拥有感产生什么样的影响, 同时也为了更好地回答身体意象是否可变的问题, 本研究通过引入距离参照系, 从虚拟手的相对位置来考察其对身体拥有感的影响。较之绝对位置上的拥有感体验情况, 在视觉刺激和触觉刺激同步的情况下, 先近后中的呈现方式会降低被试的拥有感体验, 而先远后中的呈现方式则会加强被试的拥有感体验。这一发现与身体拥有感是受稳定的身体意象以一种自上而下的方式进行调节的假设并不一致。距离参照系的引入改变了我们体验身体拥有感的环境, 尽管两种条件下都是对中间位置的虚拟手的拥有感进行判断, 但是在先近后中的条件下, 较之先前位于近处的虚拟手, 中间位置的虚拟手远离了被试, 以近处的身体意象为标准, 中间位置的虚拟手变得更不像自己的手; 而在先远后中的条件下, 较之先前位于远处的虚拟手, 中间位置的虚拟手靠近了被试,以远处的身体意象为标准, 中间位置的虚拟手会变得更像自己的手。当然这里有一个预设前提:即身体意象在一定范围内是可变的。因为如果只存在一种并且是稳定的身体意象, 总是以一种自上而下的方式影响自我表征, 那么无论呈现虚拟手的环境信息如何变化, 对于同一个位置的虚拟手被试的拥有感体验应该都是一致的。
值得注意的是, 按照自由能量原理或最小震惊原理的解释, 这种身体意象的可塑性不仅不会导致“自我”的瓦解或混乱, 而且还是维系“自我”的重要保障。受到自上而下与自下而上加工的交互作用,自由能量将得以流动与重新组织。身体意象的表征作用和感官系统输入信息之间的联合会产生一个动态的评价过程。大脑会根据新的信息输入不断地进行评估, 即什么是最可能属于“我”的。为了保证以最优的方式处理问题, 大脑必须“学会”构建一个良好的稳定模型来预测感官输入的结果(Apps &Tsakiris, 2014)。这种建构以避免震惊或震惊最小化作为最终目的。身体意象在个体的日常体验以及实验1的条件下中便发挥着类似的作用, 帮助其快速判断一个对象是否属于自己身体的一部分。在视触刺激同步情况下, 距离身体越远的虚拟手会越处于解剖学上不可能的位置, 将会产生越弱的拥有感。然而, 动态的评价过程意味着大脑会根据新的信息输入不断更新表征, 因此相应的自我表征便应该是可变的, 从而身体意象也不可能一直以稳定不变的形式存在。在实验2中, 距离参照系的引入所产生的相对位置意味着环境信息的改变。这一改变所引起的大脑重新评估便使得身体意象也发生了一定程度的改变(被试对于中间位置虚拟手的拥有感会受到距离参照系的影响而产生变化)。这种变化的目的是维系自我并避免震惊(Friston & Stephan,2007; Friston et al., 2015)。
4.4 研究的理论与实践意义
伴随具身认知(embodied cognition)运动的不断推进, 研究者越来越不满于从实验或理论上关注“身体如何因果性地影响认知活动”以及“身体是理解认知的必要条件”等等主题(Glenberg, Witt, & Metcalfe,2013)。一种融合第一人称(first-person)与第三人称(third-person)视角的具身主体(embodied subject)体验或“具身感” (the sense of embodiment)成为了新的热点(Carruthers, 2015)。身体拥有感就是具身感的主要表现形式之一, 也是对身体意象进行操作化的主要科学指标。
按照以往研究的理论假设, 表征和识别身体意象(或产生更为广泛的“具身感”)是一个将身体对单模态特征与来自其它感官系统的多模态信息进行整合的过程, 这种整合至少包含两种加工模式:自下而上(bottom-up)上的时间一致性加工机制与自上而下(top-down)的空间一致性(或特征一致性)加工机制。然而, 绝大多数研究仍然选择分别考察这两种加工机制, 并引发了诸多的争论。本研究通过引入距离参照系与同步性, 同时考察了上述两种加工模式对身体拥有感的影响方式及其交互作用, 进而初步确认了身体意象的可塑性。这也从实验层面上支持了Tsakiris (2010)提出的理论构想:身体拥有感是当前的感官输入和身体的内部模型之间交互作用的产物。最终体验到的身体拥有感是自上而下的内部表征和自下而上的多感官整合之间比较的结果。两种加工方式缺一不可。按照Brown等(2013)基于自由能量原则或最小震惊原则的解释指出, 行动与知觉的耦合产生了贝叶斯意义上最优的适应行为(adaptive behaviour)。它以预测错误的最小化形式存在。即, 我们要么通过知觉来改变预测以解释感觉输入, 要么积极地改变感觉输入以满足我们的预测。因此, 身体意象可能既不像Ramachandran等(1996)认为的那样是一种可以随意塑造的幻觉,也不是绝对稳定, 一层不变的内部表征, 而是具有一定的可塑性。身体意象的这种存在方式可以满足预测错误的最小化, 从而避免震惊。当然, 身体意象究竟在何种程度上是可塑的?有关身体意象的先验内部表征是否存在“刚性”的边界不容塑造?这些都有待后续研究予以检验。
在实践上, 身体意象的可塑性可以部分解释临床上神经性厌食症(anorexia nervosa)或神经性暴食症(bulimia nervosa)等自我具身性障碍(disorders of selfmbodiment)类精神疾病的发病机制(Giummarra,Gibson, Georgiou-Karistianis, & Bradshaw, 2008)。根据美国精神障碍诊断统计手册第五版(DSM-V)的诊断标准, 身体意象扭曲(body image distortion)通常被认为是神经性厌食症或暴食症的关键症状(Kostopoulou, Varsou, & Stalikas, 2013; Phillipou et al., 2016)。当前, 对于神经性厌食症或暴食症的治疗, 无论是药物治疗还是心理治疗都往往只能在患者发病乃至病情较严重后进行干预, 至今对于上述疾病在其症状出现之前进行预测或者早期诊断方法尚不多见。鉴于身体意象容易受不同的社会因素和心理因素的影响, 这种对身体意象的敏感性有可能导致神经性厌食症或暴食症的易感性。目前已有研究证实女性厌食症患者比正常女性更容易产生橡胶手错觉(Keizer, Smeets, Postma, van Elburg, &Dijkerman, 2014); 女性暴食症患者比正常女性与男性个体更容易产生异己手错觉(alien hand illusion)(一种将自己的手体验成他人的手的错觉, 可以由同步性刺激所诱发) (Sørensen, 2005)。因此, 未来可以将对虚拟手错觉产生的拥有感的易感性作为罹患神经性厌食症或暴食症等饮食障碍的一项临床诊断指标, 从而为更好地筛查出易感人群进行提前干预提供更具操作性的启示。
5 结论
(1)无论是同步性还是绝对位置都会对虚拟手错觉中的拥有感产生影响, 但同步性对拥有感的影响要大于绝对位置对拥有感的影响, 即视触刺激的影响要大于身体意象的影响。同步性对拥有感的影响在虚拟手位于近、远两处的情况下都存在, 而绝对位置对拥有感的影响则主要源于视觉刺激和触觉刺激的同步性。
(2)不同的距离参照系对同一位置的拥有感体验影响差异显著, 先近后远的呈现方式会减弱错觉而先远后近的呈现方式则会加强错觉。相对位置对身体拥有感的影响与我们之前假设身体意象以一种稳定的内部表征的方式影响知觉体验的情形并不一致, 我们至少可以认为外界一些因素会改变它在身体拥有感体验过程中的影响。
致谢
:感谢荷兰莱顿大学脑与认知研究所Bernhard Hommel教授, 北京师范大学脑与认知科学研究院孔风博士, 美国纽约大学心理学院汪寅博士以及匿名审稿人提出的宝贵修改意见。Apps, M. A. J., & Tsakiris, M. (2014). The free-energy self: A predictive coding account of self-recognition.Neuroscience& Biobehavioral Reviews, 41
, 85–97.Armel, K. C., & Ramachandran, V. S. (2003). Projecting sensations to external objects: Evidence from skin conductance response.Proceedings of the Royal Society of London B: Biological Sciences, 270
(1523), 1499–1506.Botvinick, M., & Cohen, J. (1998). Rubber hands 'feel' touch that eyes see.Nature, 391
(6669), 756.Brown, H., Adams, R. A., Parees, I., Edwards, M., & Friston,K. (2013). Active inference, sensory attenuation and illusions.Cognitive Processing, 14
(4), 411–427.Carruthers, G. (2013). Toward a cognitive model of the sense of embodiment in a (rubber) hand.Journal of Consciousness Studies, 20
(3–4), 33–60.Carruthers, G. (2015). Who am I in out of body experiences?Implications from OBEs for the explanandum of a theory of self-consciousness.Phenomenology and the Cognitive Sciences, 14
, 183–197.Christ, O., & Reiner, M. (2014). Perspectives and possible applications of the rubber hand and virtual hand illusion in non-invasive rehabilitation: Technological improvements and their consequences.Neuroscience and Biobehavioral Reviews, 44
(7), 33–44.Costantini, M., & Haggard, P. (2007). The rubber hand illusion:Sensitivity and reference frame for body ownership.Consciousness and Cognition, 16
(2), 229–240.Davies, A. M. A., White, R. C., & Davies, M. (2013). Spatial limits on the nonvisual self-touch illusion and the visual rubber hand illusion: Subjective experience of the illusion and proprioceptive drift.Consciousness and Cognition,22
(2), 613–636.De Ridder, D., Vanneste, S., & Freeman, W. (2014). The Bayesian brain: Phantom percepts resolve sensory uncertainty.Neuroscience and Biobehavioral Reviews, 44
, 4–15.de Vignemont, F. (2010). Body schema and body image-Pros and cons.Neuropsychologia, 48
(3), 669–680.de Vignemont, F. (2011). Embodiment, ownership and disownership.Consciousness and Cognition, 2
0, 82–93.Ehrsson, H. H. (2012). The concept of body ownership and its relation to multisensory integration. In B. E. Stein (Ed.),The new handbook of multisensory processing
(pp.775–792). Massachusetts: MIT Press.Farmer, H., Tajadura-Jiménez, A., & Tsakiris, M. (2012).Beyond the colour of my skin: How skin colour affects the sense of body-ownership.Consciousness and Cognition,21
(3), 1242–1256.Friston, K. (2010). The free-energy principle: A unified brain theory?Nature Reviews Neuroscience, 11
(2), 127–138.Friston, K., Rigoli, F., Ognibene, D., Mathys, C., FitzGerald,T., & Pezzulo, G. (2015). Active inference and epistemic value.Cognitive Neuroscience, 6
(4), 187–224.Friston, K. J., & Stephan, K. E. (2007). Free-energy and the brain.Synthese, 159
, 417–458.Gallagher, S. (2005).How the body shapes the mind
. New York: Cambridge University Press.Gallagher, S., & Meltzoff, A. N. (1996). The earliest sense of self and others: Merleau-Ponty and recent developmental studies.Philosophical Psychology, 9
(2), 211–233.Giummarra, M. J., Georgiou-Karistianis, N., Nicholls, M. E.R., Gibson, S. J., Chou, M., & Bradshaw, J. L. (2010).Corporeal awareness and proprioceptive sense of the phantom.British Journal of Psychology, 101
, 791–808.Giummarra, M. J., Gibson, S. J., Georgiou-Karistianis, N., &Bradshaw, J. L. (2008). Mechanisms underlying embodiment, disembodiment and loss of embodiment.Neuroscience & Biobehavioral Reviews, 32
(1), 143–160.Glenberg, A. M., Witt, J. K., & Metcalfe, J. (2013). From the revolution to embodiment: 25 years of cognitive psychology.Perspectives on Psychological Science, 8
(5),573–585.Guterstam, A., Abdulkaraim, Z., & Ehrsson, H. H. (2015).Illusory ownership of an invisible body reduces autonomic and subjective social anxiety responses.Scientific Reports,5
, 9831.Guterstam, A., Gentile, G., & Ehrsson, H. H. (2013). The invisible hand illusion: Multisensory integration leads to the embodiment of a discrete volume of empty space.Journal of Cognitive Neuroscience, 25
(7), 1078–1099.Guterstam, A., Petkova, V. I., & Ehrsson, H. H. (2011). The illusion of owning a third arm.PLoS One, 6
(2), e17208.Haans, A., Kaiser, F. G., Bouwhuis, D. G., & IJsselsteijn, W. A.(2012). Individual differences in the rubber-hand illusion:Predicting self-reports of people's personal experiences.Acta Psychologica, 141
(2), 169–177.Hohwy, J., & Paton, B. (2010). Explaining away the body:Experiences of supernaturally caused touch and touch on non-hand objects within the rubber hand illusion.PLoS One,5
(2), e9416.Kalckert, A., & Ehrsson, H. H. (2014). The moving rubber hand illusion revisited: Comparing movements and visuotactile stimulation to induce illusory ownership.Consciousness and Cognition, 26
, 117–132.Keizer, A., Smeets, M. A. M., Postma, A., van Elburg, A., &Dijkerman, H. C. (2014). Does the experience of ownership over a rubber hand change body size perception in anorexia nervosa patients?Neuropsychologia, 62
, 26–37.Kostopoulou, M., Varsou, E., & Stalikas, A. (2013).Thought-shape fusion in anorexia and bulimia nervosa: A comparative experimental study.Eating and Weight Disorders,18
(3), 245–253.Lloyd, D. M. (2007). Spatial limits on referred touch to an alien limb may reflect boundaries of visuo-tactile peripersonal space surrounding the hand.Brain and Cognition, 64
(1),104–109.Ma, K., & Hommel, B. (2013). The virtual-hand illusion:Effects of impact and threat on perceived ownership and affective resonance.Frontiers in Psychology, 4
, 604.Ma, K., & Hommel, B. (2015). Body-ownership for actively operated non-corporeal objects.Consciousness and Cognition,36
, 75–86.Maister, L., Slater, M., Sanchez-Vives, M. V., & Tsakiris, M.(2015). Changing bodies changes minds: Owning another body affects social cognition.Trends in Cognitive Sciences,19
(1), 6–12.McGeoch, P. D., & Ramachandran, V. S. (2012). The appearance of new phantom fingers post-amputation in a phocomelus.Neurocase, 18
(2), 95–97.Paladino, M.-P., Mazzurega, M., Pavani, F., & Schubert, T. W.(2010). Synchronous multisensory stimulation blurs self-other boundaries.Psychological Science, 21
(9), 1202–1207.Petkova, V. I., Björnsdotter, M., Gentile, G., Jonsson, T., Li,T.-Q., & Ehrsson, H. H. (2011). From part-to whole-body ownership in the multisensory brain.Current Biology,21
(13), 1118–1122.Phillipou, A., Rossell, S., Gurvich, C., Castle, D. J., Troje, N.F., & Abel, L. A. (2016). Body image in anorexia nervosa:Body size estimation utilising a biological motion task and eyetracking.European Eating Disorders Review, 24
, 131–138.Ramachandran, V. S., Brang, D., McGeoch, P., & Rosar, W.(2009). Sexual and food preference in apotemnophilia and anorexia: Interactions between "beliefs" and "needs"regulated by two-way connections between body image and limbic structures.Perception, 38
(5), 775–777.Ramachandran, V. S., Levi, L., Stone, L., Rogers-Ramachandran,D., McKinney, R., Stalcup, M., ... Flippin, A. (1996).Illusions of body image: What they reveal about human nature. In L. Rodolfo & P. S. Churchland (Eds.),The mind-brain continuum: Sensory processes
(pp. 29–60).Massachusetts: MIT Press.Ramachandran, V. S., Rogers-Ramachandran, D., & Cobb, S.(1995). Touching the phantom limb.Nature, 377
(6549),489–490.Sanchez-Vives, M. V., Spanlang, B., Frisoli, A., Bergamasco,M., & Slater, M. (2010). Virtual hand illusion induced by visuomotor correlations.PLoS One, 5
(4), e10381.Shimada, S., Fukuda, K., & Hiraki, K. (2009). Rubber hand illusion under delayed visual feedback.PLoS One, 4
(7),e6185.Sørensen, J. B. (2005). The alien-hand experiment.Phenomenology and the Cognitive Sciences, 4
, 73–90.Suzuki, K., Garfinkel, S. N., Critchley, H. D., & Seth, A. K.(2013). Multisensory integration across exteroceptive and interoceptive domains modulates self-experience in the rubber-hand illusion.Neuropsychologia, 51
(13), 2909–2917.Tsakiris, M. (2008). Looking for myself: Current multisensory input alters self-face recognition.PLoS One, 3
(12), e4040.Tsakiris, M. (2010). My body in the brain: A neurocognitive model of body-ownership.Neuropsychologia, 48
(3), 703–712.Tsakiris, M., Carpenter, L., James, D., & Fotopoulou, A.(2010). Hands only illusion: Multisensory integration elicits sense of ownership for body parts but not for non-corporeal objects.Experimental Brain Research, 204
(3), 343–352.Tsakiris, M., & Haggard, P. (2005). The rubber hand illusion revisited: Visuotactile integration and self-attribution.Journal of Experimental Psychology: Human Perception and Performance, 31
(1), 80–91.Tsakiris, M., Longo, M. R., & Haggard, P. (2010). Having a body versus moving your body: Neural signatures of agency and body-ownership.Neuropsychologia, 48
(9), 2740–2749.Tsay, A., Allen, T. J., Proske, U., & Giummarra, M. J. (2015).Sensing the body in chronic pain: A review of psychophysical studies implicating altered body representation.Neuroscience and Biobehavioral Reviews, 52
, 221–232.Zhang, J., & Hommel, B. (2015). Body ownership and response to threat.Psychological Research,
1–10.Zhang, J., & Li, H. W. (2016). The plasticity of selfrepresentation: Based on the studies of rubber hand illusion.Psychological Science, 39
(2), 299–304.[张静, 李恒威. (2016). 自我表征的可塑性: 基于橡胶手错觉的研究.心理科学, 39
(2), 299–304.]Zopf, R., Savage, G., & Williams, M. A. (2010). Crossmodal congruency measures of lateral distance effects on the rubber hand illusion.Neurophychologia, 48
(3), 713–725.Zopf, R., Truong, S., Finkbeiner, M., Friedman, J., & Williams,M. A. (2011). Viewing and feeling touch modulates hand position for reaching.Neuropsychologia, 49
(5), 1287–1293.猜你喜欢
军事文摘·科学少年(2021年9期)2021-10-13
思维与智慧·上半月(2018年11期)2018-11-30
小学阅读指南·低年级版(2017年8期)2017-09-12
科学大众(中学)(2017年6期)2017-09-04
特别文摘(2017年8期)2017-04-19
世界热带农业信息(2016年5期)2016-06-04
少儿科学周刊·儿童版(2016年1期)2016-03-14
爆笑show(2015年12期)2016-01-07
爆笑show(2015年11期)2015-12-17
世界热带农业信息(2014年7期)2014-09-03