利用高动态范围图像技术测量道路亮度的方法探究
2016-01-28 07:43王立雄陈燕男冯子龙
照明工程学报 2015年6期
关键词:误差分析
王立雄,陈燕男,冯子龙
(天津大学建筑学院,天津市建筑物理环境与生态技术重点实验室,天津 300072)
利用高动态范围图像技术测量道路亮度的方法探究
王立雄,陈燕男,冯子龙
(天津大学建筑学院,天津市建筑物理环境与生态技术重点实验室,天津300072)
摘要:目前利用低动态范围图像获取光环境中的光度和颜色参数的技术和理论已经很成熟,但由于图像记录格式的限制,尤其是当环境光的亮度对比超过一定限值时,低动态范围图像就不能完整记录亮度信息。为了解决这一问题,课题组将高动态范围图像技术(HDRI)引入本研究。本研究的目的是建立一种可以利用HDRI获取光环境中的光参数的方法,对该方法的可靠性进行论证。通过与传统测试方法进行对比,分析误差来源及范围,为之后相关研究建立基础。
关键词:高动态范围图像;光环境信息;误差分析
引言
目前,测量光环境光度色度参数的方法中,有一种是利用普通的图像获取,即低动态数字图像,相对而言,这种低动态图范围图像的获取非常便捷,通过普通的数码相机就可以达到,虽然目前这一技术可操作性和理论完整性都已成熟,但该方法存在一定局限性。通过普通的数码相机获得的这些图像,受制于设备及图像本身信息储存量的限制,只能显示256个灰度级别,因而不能更全面的表达测试情况,动态范围受到限制。
然而夜间道路光环境的情况相对要更复杂,环境的总体亮度较低,而车灯、路灯等又为较高亮度的光源,这种同时出现的低亮度的道路和高亮度的光源,亮度差异巨大,以至于超过了图片灰度宽容度范围,因而该测试点的亮度信息无法被真实的表达出来,甚至丢失很大一部分重要的亮度信息。
为了解决上述问题,课题组引入了高动态范围图像(简称HDRI,即High-Dynamic Range image)技术。高动态范围图像相比低亮度范围图像,最大的进步体现在采用了浮点值存储的方式保存图像信息,具有比低动态数字图像更大的数据存储范围来记录相应的亮度信息,从而更真实全面地获得环境中的亮度信息。
本文中的低动态范围图像,将简称为LDRI,即Low-Dynamic Range image。
1方法的建立
1.1获取HDRI的方式
目前获取高动态范围图像主要有两种方法:一种是多次曝光法,另一种是图像传感器捕获法。
多次曝光法是对一幅静态场景按照不同的曝光参数进行多次曝光,将多次曝光获得的图像合成以获得高动态范围图像。该方法的具体方法为:利用数码相机对同一静态场景的光环境信息进行采集,采集时进行多次曝光(分时曝光),且需要在多次曝光时场景的光照条件及相机除曝光时间以外的参数设定都保持不变,在多次曝光之后获得多张低动态范围图像,然后再利用专用的软件将之前获得的多张低动态范围图像合成,得到高动态范围图像,由于需要对同一个静态场景进行多次曝光,因此这种方法仅适用于静态场景。
图1显示了由三张不同曝光度的低动态图像合成的高动态范围图像。

图1 由三张图片合成一张HDR图像Fig.1 Using 3 pictures to make a HDR image
图像传感器捕获法,是通过对图像获取设备的改进,从而能够直接拍摄高动态范围图像。目前,国外已有多个实验室对尝试制造这类相机,并研发出了可直接拍摄高动态范围图像的相机。这类相机的制作主要原理可基于不同的理论,如多靶面曝光合成,单像素集成多个感光单元,自适应像素曝光,SVE(Spatially Varying Pixel Exposures),光学衰减器法,Digital Micro Mirror阵列技术,CMOS对数变换法等不同的多重曝光的方法,能在一次曝光后直接获得高动态范围图像,更适用于动态场景。然而,该方法所需的设备相对昂贵和复杂,甚至需要使用前掌握一定的电子工程知识。此外,目前尚未有适合要求的HDR相机进入市场。
在本研究中,研究对象为“夜间道路光环境”,其光环境状况相对稳定。为了能为光环境评估提供完整的图像亮度信息并考虑道路交通状况,测试方法的便利性与安全性的重要性也就更加凸显。综合考虑以上信息,在本课题研究过程中,获取高动态范围图像的方法为多次曝光法。
1.2从高动态范围图像提取亮度信息的原理
数码相机对光的感知是和人眼是不同,它是通过感光元件感知光电子的,而且能够以线性方式获得,数据的准确性大大高于人眼。图2显示了数码相机中广泛使用的一种图像传感器,即CCD传感器,电荷感应密度与曝光量之间的关系,由图像我们可以看到,它是成线性关系。但是该传感器存在一个电荷感应密度的饱和值,因此,在图像传感器饱和之前,即在A点以前,我们可以说,数码相机的输出信号强度与入射光强成正比的,利用上述特性,我们便能从HDRI中获得我们所需要的光环境信息。
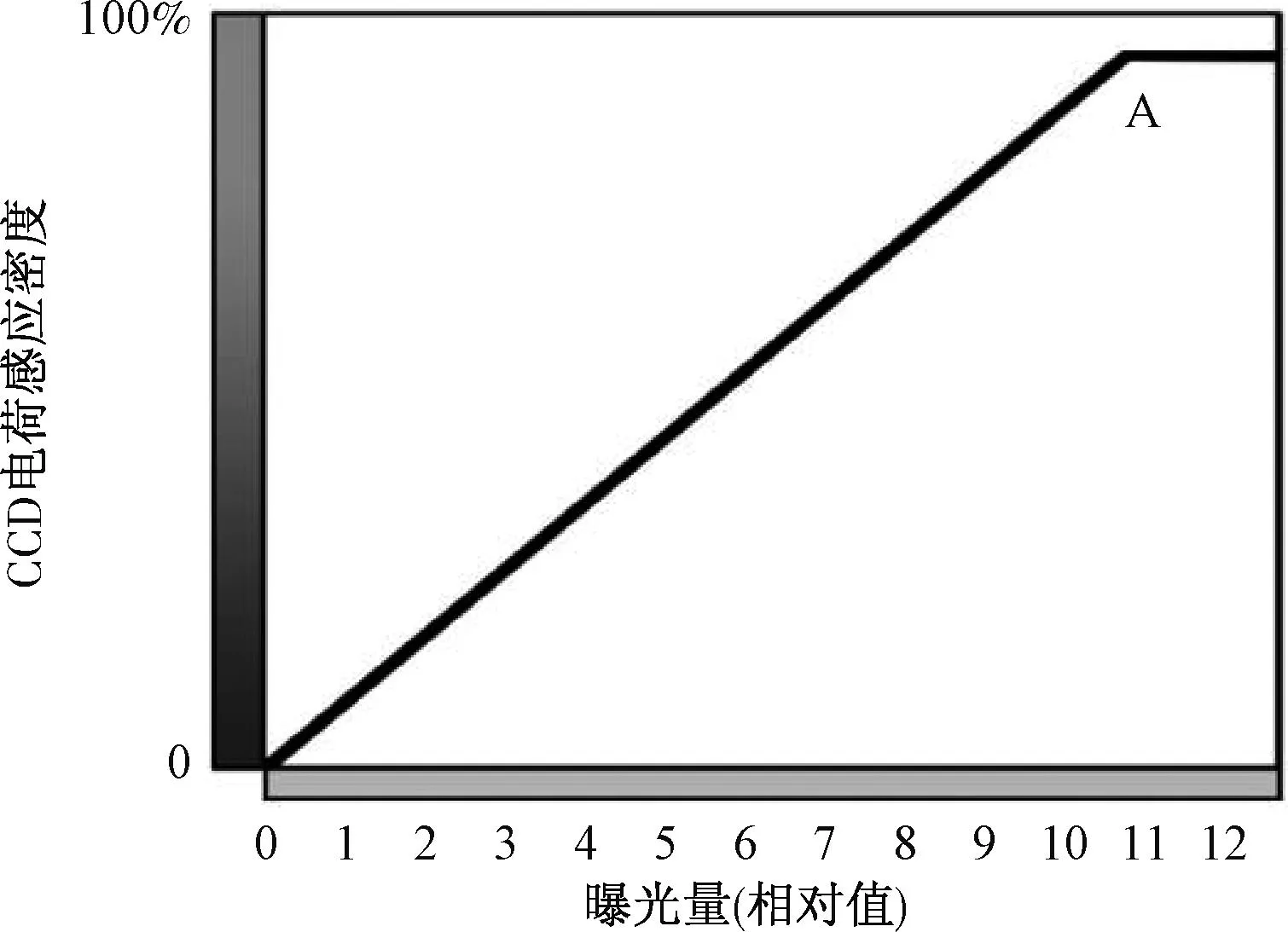
图2 CCD电荷感应密度与曝光量关系Fig.2 Exposure in linear pattern
曝光量(H)与图像的亮度(E0)有如下关系:
H=E0×T
(1)
式(1)中T为曝光时间。
图像的亮度可由公式(2)计算:
(2)
其中T是镜头的传输系数,B是对象的实际亮度,F是照相机的光圈。
结合公式(1)、(2)得到
(3)
通过公式(3),被测物体的亮度就可以计算出来。
1.3从HDRI中提取亮度信息
分析HDRI的软件有很多种,比如HDRShop,Picturenaut,PhotoSphere,Photomatix,FDRTools等等,通过比较各种软件的可操作性和功能性,我们最终决定采用Photomatix 4.2作为最终HDRI的分析软件。
将相机架设在三脚架上,使用相机控制曝光时间的功能,我们可以得到一系列的图像,并通过Photomatix 4.2软件合成HDRI。在合成过程中,该软件可自动读取包含在RAW格式中的图像亮度信息。对于由两个或两个以上可靠的图片亮度信息时,亮度会自动根据这几张图像进行亮度平均计算。因此,利用HDRI获取亮度信息要比LDRI更可靠。合成HDRI图像后,通过自主研发的软件HDRviewer V1.4进行图像中的亮度等信息提取,以此获得相关参数。
2实验与实践
2.1实验的步骤
1)选择实验对象:为了方便实验,我们选择在天津大学校内进行试验,在实验过程中,我们选择了两条使用不同的典型形式路灯的道路,通过初期调研发现,天津大学校内的道路照明光源主要有传统的高压钠灯和新型的LED产品,因此我们对这以两种光源作为照明的道路实验对象。
2)现场测试:在实验过程中,为了确保两种检测方法中的测点完全一致,首先在观测路面上画出大致格线、布置点位。确定点位后,使用BM-7色度亮度计对测试路面进行亮度测试,这一过程中,我们使用的是佳能牌EOS 5DⅠ相机进行低动态范围图像的采集。拍摄时将相机内置的优化功能关闭,如锐化、降噪等,白平衡(AWB)设置为自动、感光度设置为ISO400、sRGB色彩空间,格式输出设置为RAW。同时在实验过程中,为了尽可能的减少由于操作造成的图像位移,我们还采用三脚架和快门线协助进行拍摄,从而避免在HDRI合成过程中产生的像素位移。拍摄过程中,保持光圈大小以及对焦点的位置不变,以+1EV步长,对曝光时间进行调整,达到多次曝光的目的,进行拍摄。
3)图像处理:使用Photomatix 4.2软件将之前获得的LDRI合成HDRI。选用标准相机特性曲线对图像进行合成,并将软件中去除鬼影、对齐像素等功能开启,尽量降低误差率。
4)数据分析:将利用HDRI通过HDRviewer V1.4软件获得的道路亮度信息与BM-7测试值进行比较,并对两者进行误差率的计算,进而验证利用HDRI获得的亮度值方法的可靠性。
2.2测点的设置
测试道路宽度为7m,灯杆间距为25m,采用单侧布灯的方式。
根据《照明测量方法》(GB/T 5700—2008),灯杆间距被平均分成8等分,设置9个测试点,以 “1, 2,…”标记。道路宽度被均分成2等分,设置3个测试点,以“A, B, C”标记,具体见图3。
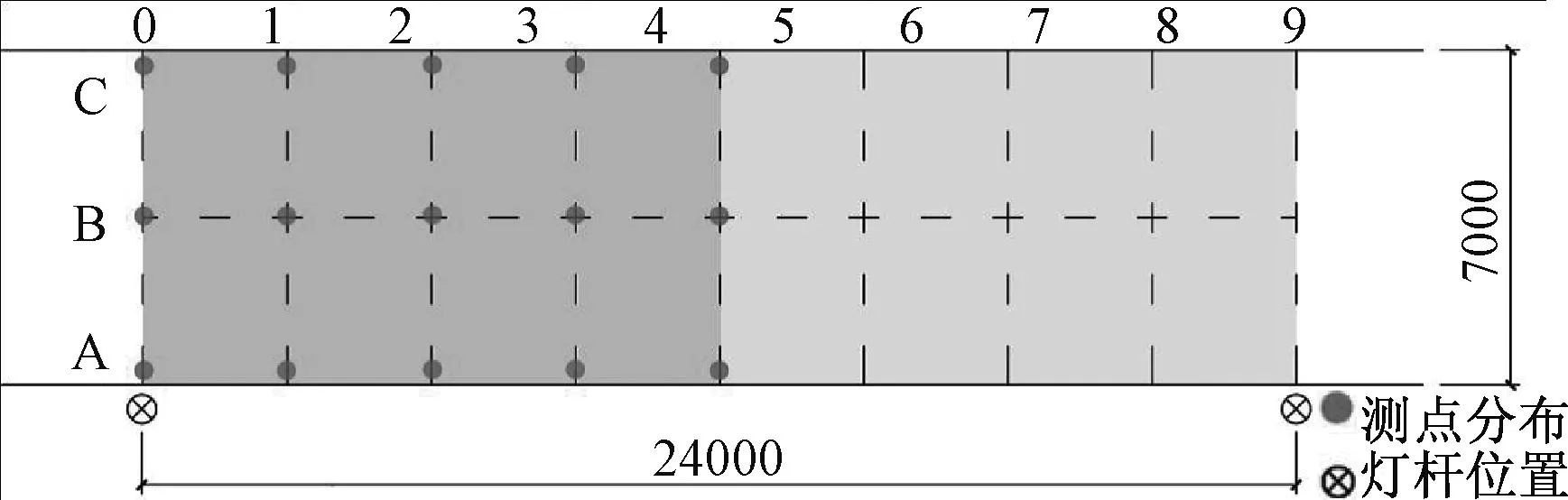
图3 测点布置示意图Fig.3 Test points distribution
实验的目的是为了校验该测试方法的可靠性,而不是评估道路的照明环境。因此我们选择测点1~5来进行测试。
2.3测试数据
1)道路1——以高压钠灯为照明光源:
利用BM-7测得的该道路亮度信息如下表1所示,利用合成的HDRI计算得出的该道路的亮度信息如表2。BM-7测得的平均亮度为0.439 cd/m2,利用HDRI计算得出的该道路平均亮度为0.426 cd/m2。
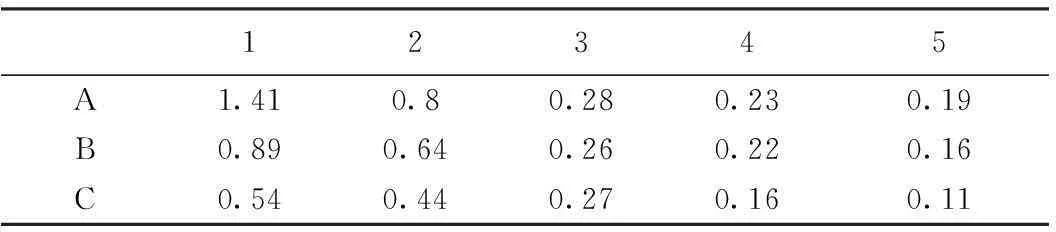
表1 BM-7测得的道路1的亮度信息 单位:cd/m2
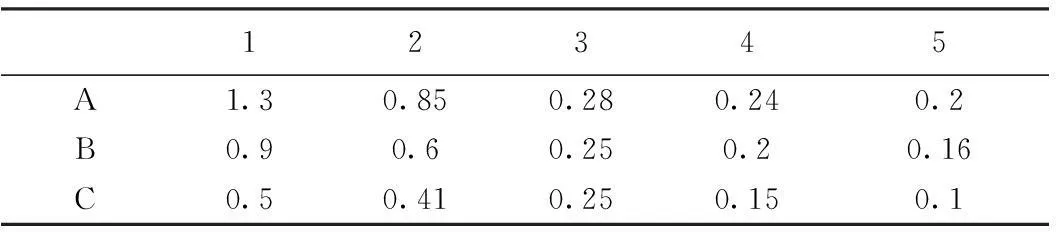
表2 利用HDRI计算得出的道路1的亮度信息 单位:cd/m2
2)道路2——以LED灯为照明光源:
利用BM-7测得的该道路亮度信息如表3所示,利用合成的HDRI计算得出的该道路的亮度信息如表4所示。

表3 BM-7测得的道路2的亮度信息 单位:cd/m2
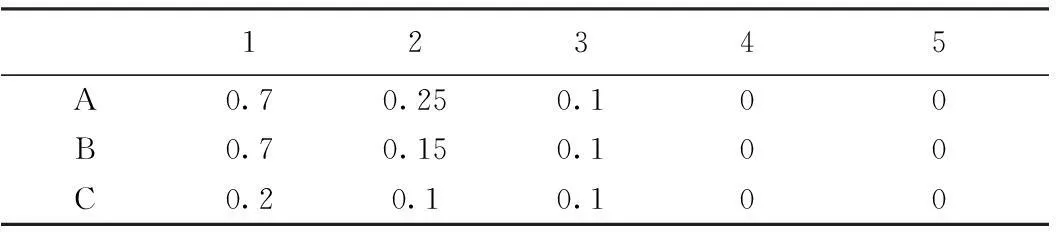
表4 利用HDRI计算得出的道路2的亮度信息 单位:cd/m2
在表3中出现负数,是由于超过BM-7的最小量程(0.01 cd/m2),因此表中4、5两个测点的数据无效。
3实验结果分析
3.1数据分析
上文中已用BM-7测得环境亮度及HDRI计算获得亮度分别对两条道路的各测点进行了测试。验证利用HDRI获得环境亮度是否准确,通过对比两者之间的误差,获取误差率便可知其准确性。各测点误差率计算方式为:
设利用BM-7测量的数值为α,利用HDRI计算得到的数值为β,则误差率为E,即

利用如上公式,我们通过绘制图表来表示误差率的波动值及范围并进行分析,从而对通过HDRI获得环境亮度的方法的准确性进行评估。
1)道路1——以高压钠灯为照明光源:
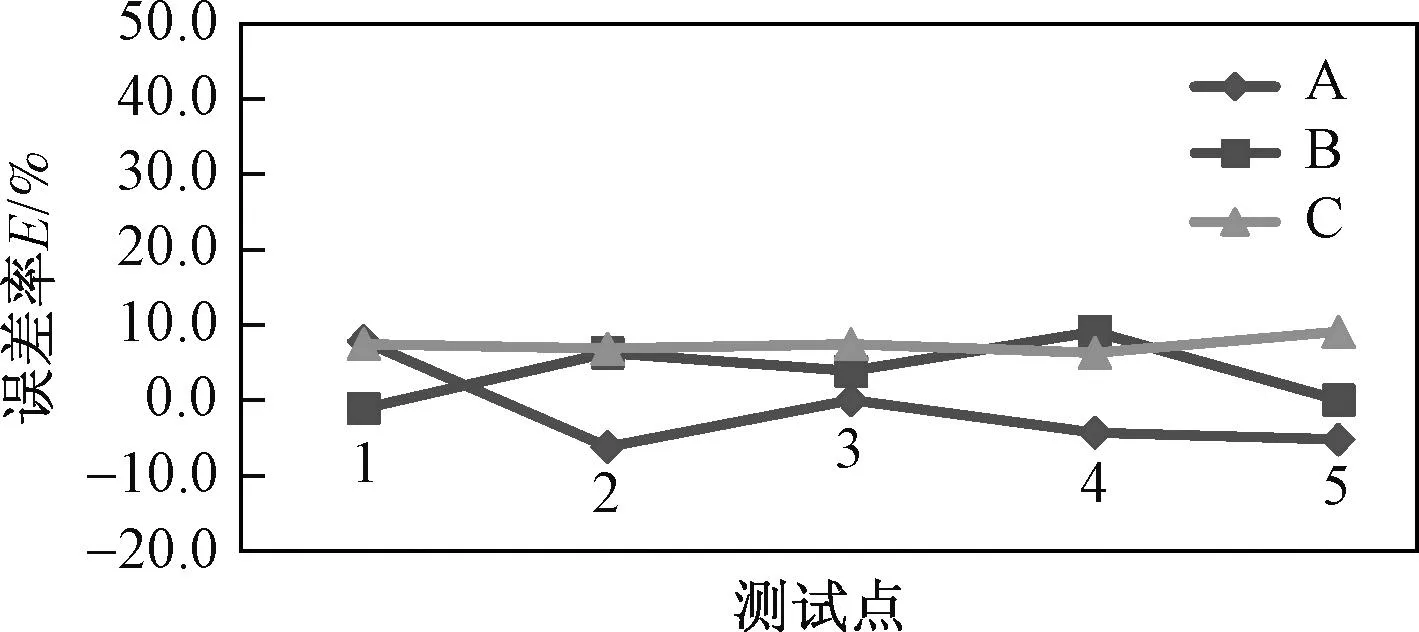
图4 道路1误差变化趋势分析Fig.4 The tendency of the error rates of road
对比两种测量方式,发现误差在±10%,如图4所示误差值的变化趋势,平均值的误差为3%。
2)道路2——以LED灯为照明光源:
通过表3和表4可知,通过HDRI测量得到的亮度参数与通过BM-7所得到参数有很大不同。而且在表4中第C行、第3列的测点所得到数值不足0.1cd/m2,这样通过其他有效点计算所得误差范围为±12%,这就意味着这种误差检测方法不可以在低于0.1cd/m2的环境中使用。
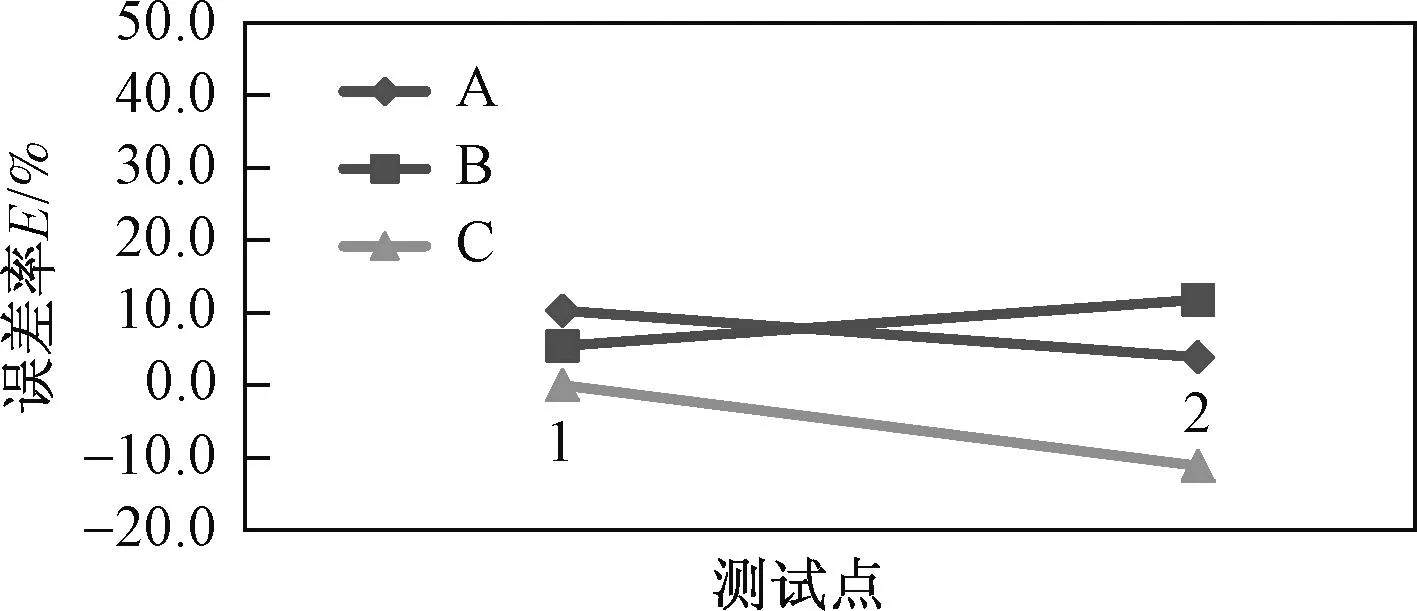
图5 道路2误差变化趋势分析Fig.5 The tendency of the error rates of road 2
根据BM-7测得的亮度平均值(由“1”和“2”得出)约为0.37 cd/m2,HDRI得到的亮度平均值约是0.35 cd/m2,误差率约为5%,所以这样的方法所得到平均亮度更精确。
3.2误差分析
利用BM-7色度亮度计对夜间进行亮度测试时,其系统固有误差,相对测试误差较小。在测试时,当测点与测试位置距离较远时,根据几何关系,视角投射到地上的范围为一个椭圆,与实际测点状况存在一定差异。因此利用BM-7对相对距离较远测点进行测量时,对测量范围选取上存在一定误差。
采用HDRI提取亮度时,误差产生主要来自于拍摄过程、HDRI的合成过程和利用自制软件读取点与BM-7测试点的差异这三部分。在拍摄过程中,我们使用了三脚架与快门线来尽量避免由于拍摄过程中的位移及震动造成的误差,但有时在拍摄不同曝光期间仍不可避免会有微量位移;在使用Photomatix4.2软件合成HDRI的过程中,需要用到软件中对齐、去鬼影功能,由此也会造成一定误差;在从HDRI提取亮度信息的过程中,我们采用的是自行研发的软件,同时由于透视的关系以及照相机的成像特点,距离较远的测点在图像上所占的像素较小,读取数据选择的点难免会与由BM-7色度亮度计进行瞄点测量的区域产生差异,由此产生误差,这一误差也是在上述实验中产生误差的主要原因。
4结语
为了克服LDRI的不足,利用HDRI来获取光参数信息,介绍本文试图建立一个获取光度参数的照明环境的HDRI的方法。在道路照明环境测试实验中,对该方法进行了可靠性检查。通过实验,得出的结论是:
1)本方法的精度是0.1 cd/m2。所以对于低亮度区域,该方法是不适用的。
2)该方法测得的平均亮度的误差率约为5%。因此该方法能更精确评估照明环境的整体信息。
参考文献
[1] Debevee Paul E,Malik J.Recovering high dynamic range radiance maps from Photographs[C].Proc of ACM SIGGRAPH,1997:369-378.
[2] Moeck M,Anaokar S. Illuminance analysis from high dynamic range images. Leukos 2006,2(3):211-228.
[3] Inanici M N.Evaluation of high dynamic range photography as a luminance data acquisition system[J].Lighting Research & Technology,2006,2(38):123-134.
[4] Martin Moeck.Accuracy of luminance maps obtained from high dynamic range images.Leukos ,2006,2(4):99-112.
[5] Mardaljevic J,Painter B,Andersen M.Transmission illuminance proxy HDR imaging: A new technique to quantify luminous flux.Lighting Research & Technology,2009,1(41):27-46.
[6] Laura Bellia,Marilena Musto,Gennaro Spada.HDR Luminance Mapping Analysis System for Visual Comfort Evaluation.Singapore: International Instrumentation and Measurement Technology Conference,2009.
[7] Christian Bloch. HDRI手册:高动态范围影像处理技术[M].李京,译.北京:人民邮电出版社,2010.
[8] 包诚学.摄影镜头的光学原理及应用技巧[M].上海:上海交通大学出版社,1999.
[9] 王忠立,赵清洁. 高动态图像获取技术[J].光学技术,2006,32(增刊):279-282.
[10] 易斌,米红菊,赵宏伟.基于HDR图像处理的数码相机成像式亮度测量方法[J].光学技术,2012,38(2):191-196.
[11] 陈财生. 基于高动态范围图像计算场景亮度及眩光[D].天津:天津大学, 2005.
[12] 荆其诚,焦书兰,喻柏林,等.色度学[M].北京:科学出版社,1979.
[13] 黄珂.道路照明测量方法研究[D].重庆:重庆大学,2006.
A Method of Obtaining Luminance Information Based on
The High Dyhamic Range Image
Wang Lixiong,Chen Yannan,Feng Zilong
(SchoolofArchitecture,TianjinUniversity,TianjinKeyLaboratoryofArchitecturalPhysicsEnvironmentand
BionomicTechnique,Tianjin300072,China)
Abstract:The theory and technology of obtaining the Photometric and Color Parameters from the lighting environment through Low Dynamic Range Images have been very mature. But due to the record format limitations, the Low Dynamic Range Image can’t record the entire luminance information when the Brightness Contrast of the environment exceeds a certain extent. Thus the High Dynamic Range Image is introduced to solve this problem. The object of this paper is to establish a method of obtaining the Photometric Parameters from the lighting environment through HDR Images. In this research,we compared with the traditional test method to demonstrate the reliability of the method. Also the correction factor of the method should be discussed in future study in order to apply the method to obtain the luminance information from lighting environment. This research provides a foundation for a new method to assess the lighting environment.
Key words:high dynamic range image; luminance information; error correction
基金项目:国家自然科学基金资助项目(基于高动态图像技术的城市立交桥照明安全研究,项目编号:51178299)
中图分类号:TM923
文献标识码:A
DOI:10.3969j.issn.1004-440X.2015.06.025
猜你喜欢
物联网技术(2016年12期)2017-01-21
物理教学探讨(2016年11期)2016-12-19
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年7期)2016-05-19
中学课程辅导·教师教育(中)(2016年2期)2016-03-24
物理教学探讨(2015年12期)2016-01-11
化学教学(2015年8期)2015-10-15
光学仪器(2015年3期)2015-08-04