双自由度串联机械手的输入转矩优化
2016-01-22 09:19:19张安民赵武
华侨大学学报(自然科学版) 2016年1期
张安民, 赵武
(1. 泸州职业技术学院 机械工程系, 四川 广安 646000;
2. 四川大学 制造科学与工程学院, 四川 绵阳 621000)
双自由度串联机械手的输入转矩优化
张安民1, 赵武2
(1. 泸州职业技术学院 机械工程系, 四川 广安 646000;
2. 四川大学 制造科学与工程学院, 四川 绵阳 621000)
摘要:针对串联机械手在执行任务过程中执行机构输入转矩较大,导致机构运动不平稳的问题,创建双自由度串联机械手运动简图模型.采用能量最小化控制方式,构造能量控制的动力学方程,分析机械手关节角度、连杆质量及各关节之间的距离,确定优化关系式.采取优化方法计算输入转矩的控制方程,得出输入转矩的最佳尺寸,并结合具体实例,在Matlab/Simulink软件中对优化后输入转矩进行仿真.结果表明:与优化前的仿真结果相比较,优化设计后机械手输入转矩较小,整体波动相对平稳,效果较好.
关键词:机械手; 串联; 双自由度; 输入转矩; 动力学方程; 仿真分析
机械手是指能够具备人手和臂的某些动作功能[1],完成对现实生活中产品的加工、抓取及搬运等工作.机械手具有提高生产效率、连续工作、降低成本等很多优点,主要应用于航空航天、海洋探测、危险品搬运等许多行业.当前,机械手按照驱动方式分为机械式、液压式、电动式及气动式;按照机构种类分为串联式和并联式;按照自由度分为单自由度式、双自由度式及多自由度式.目前,对机械手输入转矩的研究文献有许多.文献[2-4]针对平面机械手关节驱动力矩限制器控制问题进行优化研究,建立机械手空间模型,对力矩方程式进行推导和分析.文献[5-7]针对机械手输入转矩算法问题展开研究,采用神经元网格算法,计算机械手输入转矩控制结构,增强了机械手运动过程中控制结构的整体稳定性.文献[8-10]针对机械手关节输入转矩最小化问题进行研究,采用遗传算法,对关节最小力矩的轨迹要求进行优化,保证机械手高速运转时输入转矩最小.以往研究的串联机械手在执行任务过程中,执行机构输入转矩较大,导致运动不平稳,不能很好满足任务的需求.机械手执行机构的负荷不仅取决于连杆上质量的分布,也取决于有效运动的产生.鉴于此,本文基于能量最小化的优化实现双自由度串联机械手的输入转矩最小化,通过动力学方程推导得到的优化运动方程式,优化各个相关参数,并通过Matlab/Simulation软件对优化输入转矩进行仿真验证.
1能量最小控制
1.1 机械手的动力学方程
双自由度串联机械手简图,如图1所示.高度非线性动力学条件的耦合微分方程为

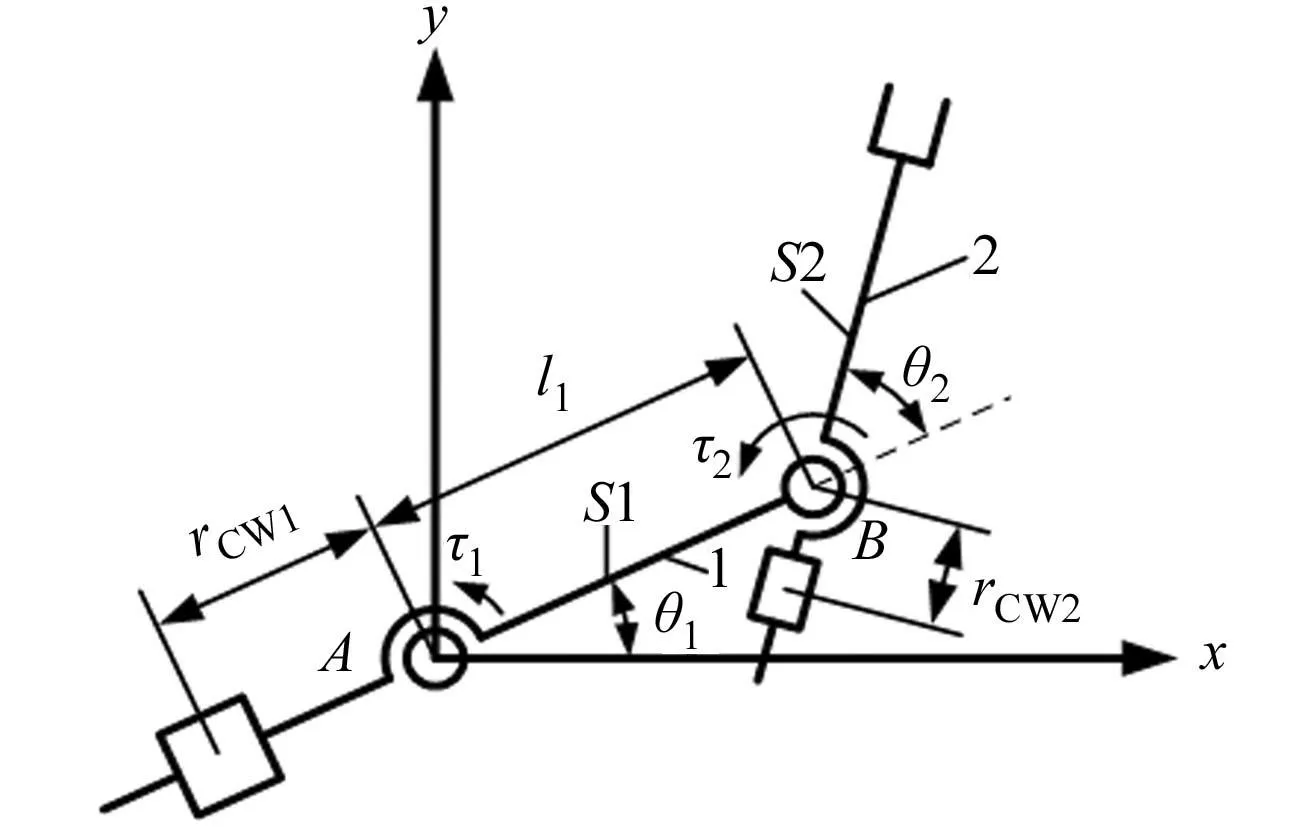
图1 双自由度串联机械手Fig.1 Double degree of freedom serial manipulator
依照获得的关节角度和角度的导数,可以将双自由度非平衡串联机械手的动力学方程(1)改写为

1.2 改进的计算力矩控制律[11-12]
在关节空间逆动力学中,对拉格朗日方程(1)中高度非线性化和高度耦合的动力学条件(参数)进行精确补偿.对非线性反馈控制法则(前馈计算力矩)的计算为


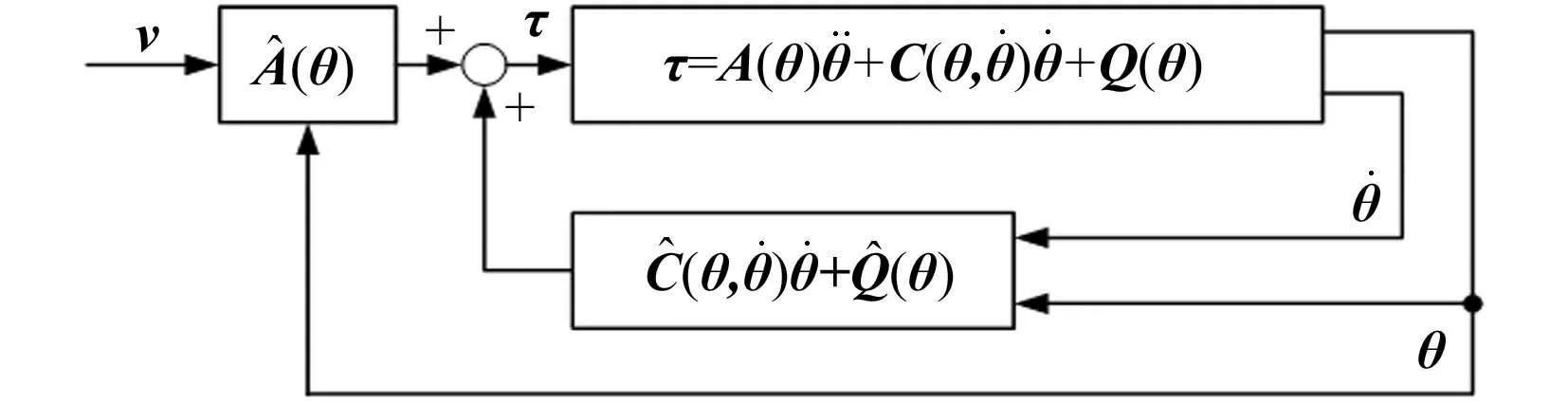
图2 反馈线性化结构Fig.2 Structure of feedback linearization

1.3 二重积分器的闭环控制器
给定一个关节空间轨迹θj(t),作为一个对控制器而言,是很明显的选择,它所产生的v(t)是一个比例-微分加上前馈加速度控制的函数,有

式(5)中:比例矩阵和微分矩阵KP和KD是正对角矩阵.
将式(5)代入式(4)可得



线性去耦的闭环系统,如图3所示.反馈线性化结构和闭环控制器之间的分隔因为若干原因变得重要.反馈线性化的结构被拉格朗日方程固定住了.式(6)给出的闭环控制器仅仅是最简单的选择,能实现在由式(1)提供的模型具有完全知识的理想情况下,对关节空间轨迹进行渐近追踪.然而,具有完全的自由可以修改闭环控制器以实现不同的其他目标(如增强针对参数不确定性、外部干扰等条件的鲁棒性),不需要修改专用于反馈线性化的结构.
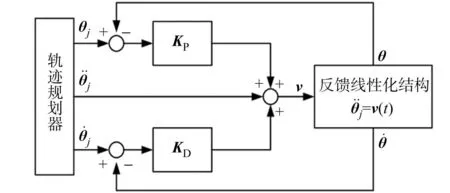
图3 线性去耦闭环系统Fig.3 Closed-loop system of linear decoupling
1.4 二重积分器的能量最小化
二重积分器系统表达式为

它是完全可以控制的.
寻找一个函数u(t),它能引导x(0)=[0θI]到x(T)=[0θF]T,对以下积分进行最小化,即

式(9)中:θI和θF分别是初始位置和最终位置.
在0≤t≤T区间,最小范数连续输入[13]为




应该注意到,这些保证了初始位置和最终位置间运动执行的关系为系统提供了最小的能量消耗.
2转矩最小化
考虑由于平衡重引起的输入转矩,有




为显示平衡重质心的转动半径对输入转矩的影响,将式(14),(15)改写为


为了获得一个最小的均方根值,需要对以下和进行最小化,即



三次方程式(19)的实数解可以由Viette-Cordano方法[14]表示为代数形式.为了确定根,首先应该计算以下关系式,即


为了确定复数根,需要计算以下关系式,即

其中,实根为z1,j=Aj+Bj-aj/3.当Aj= Bj时,复根变成实根,则有z2,j=-Aj-aj/3.
3设计实例
采用Matlab软件对转矩值进行优化,优化计算所得尺寸,如表1所示.将优化后的尺寸参数输入Matlab/Simulink中进行输入转矩仿真,同时与优化前的输入转矩进行了对比,结果如图4所示.图4中:τ为转矩输入值;t为时间.
从图4可知:优化后的双自由度机械手输入转矩值整体波动比较小,波动的最大值约为3.5 N·m;而优化前的双自由度机械手输入转矩值整体波动比较大,波动的最大值约为7.5 N·m.通过对比可知,优化后输入转矩值相对优化前大约减少了53%,转矩输入值有明显地降低,效果较好.
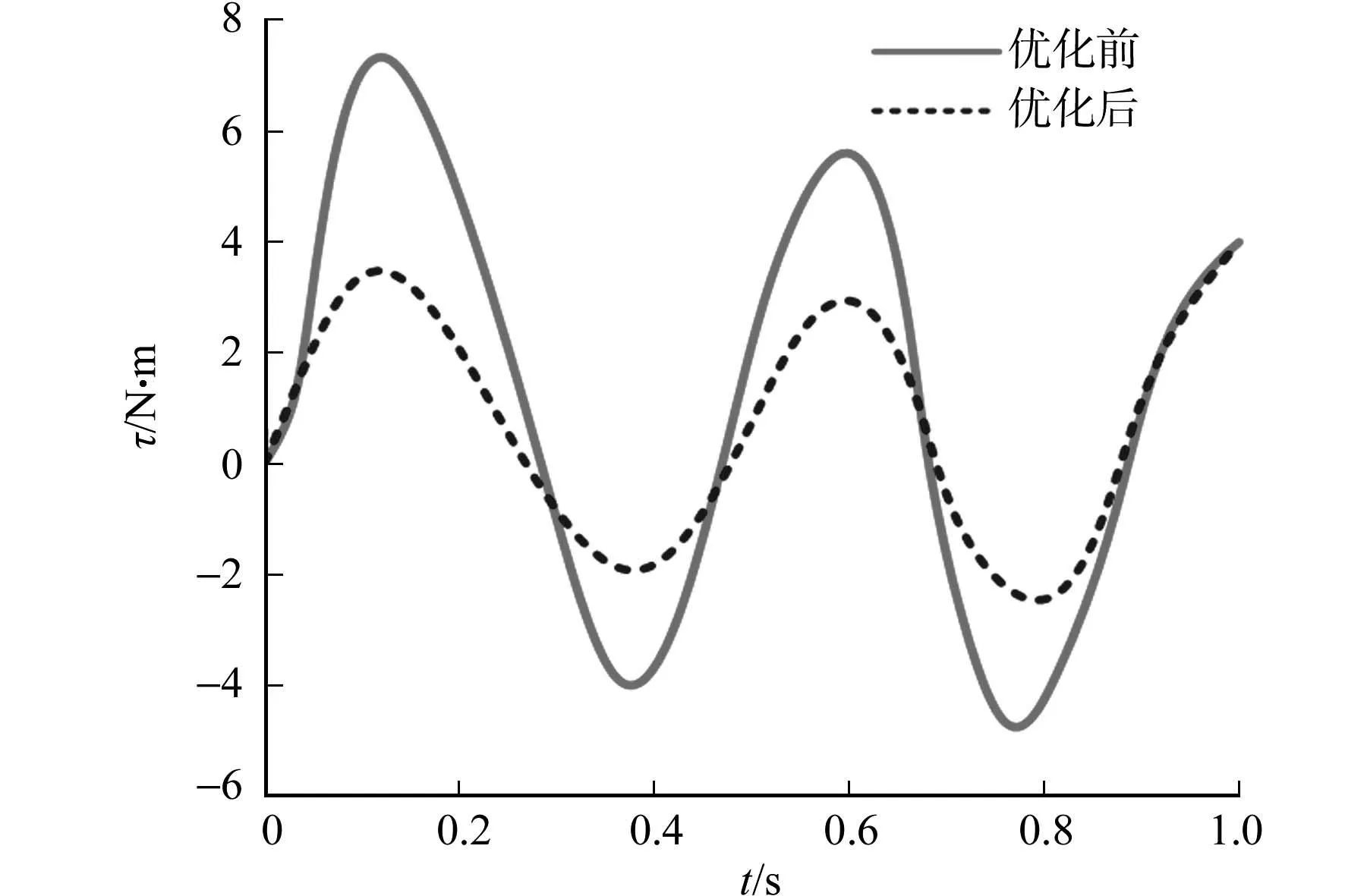
图4 转矩输入值仿真曲线Fig.4 Simulation curve of torque input value

参数数值参数数值参数数值θ1,I/(°)0m2/kg2.1lS2/m0.12θ2,I/(°)1.17l1/m0.35IS1/kg·m20.16θ1,F/(°)0.54lA,S1/m0.11IS2/kg·m20.11θ2,F/(°)1.69lB,S2/m0.11rCW1/m0.27m1/kg2.4lS1/m0.12rCW2/m0.16
4结束语
通过能量最小控制和优化可动质量重分布,对双自由度串联机械手进行输入转矩最小化,双自由度串联机械手的输入转矩最小化由基于能量最小的优化运动执行实现.通过对动态和静态载荷引起的输入转矩的均方根值进行最小化,得到了优化的平衡重布置方式.推导得到了2个三次方程,使平衡重质心回转半径的确定成为可能.最后,采取Matlab/Simulink软件实现了优化数值仿真.仿真结果显示,优化后的双自由度串联机械手的输入转矩有明显地降低,为机械手的转矩深入研究提供了参考依据.
参考文献:
[1]郭洪武.浅析机械手的应用与发展趋势[J].中国西部科技,2012,11(10):3-4.
[2]ZHANG Meiying,GOSSELIN C.Optimal design of safe planar manipulators using passive torque limiters [J].Journal of Mechanisms and Robotics,2015,8(1):1-11.
[3]SUN Yongjun,LIU Yiwei,ZOU Tian,et al.Design and optimization of a novel six-axis force/torque sensor for space robot [J].Measurement,2015,65(4):136-147.
[4]MELIN P,ASTUDILLO L,CASTILLO O,et al.Optimal design of type-2 and type-1 fuzzy tracking controllers for autonomous mobile robots under perturbed torques using a new chemical optimization paradigm[J].Expert Systems with Applications,2013,40(7):3186-3195.
[5]ONIZ Y,KAYNAK O.Control of a direct drive robot using fuzzy spiking neural networks with variable structure systems-based learning algorithm[J].Neurocomputing,2015,149(11):607-616.
[6]TOLOUE S F,AKBARZADEH M R,AKBARZADEH M A,et al.Position tracking of a 3-PSP parallel robot using dynamic growing interval type-2 fuzzy neural control[J].Applied Soft Computing,2015,37(12):2-13.
[7]TRAN D T,KOO I M,LEE Y H,et al.Central pattern generator based reflexive control of quadruped walking robots using a recurrent neural network [J].Robotics and Autonomous Systems,2014,62(11):1497-1515.
[8]GUO Dongsheng,ZHANG Yunong.Different-level two-norm and infinity-norm minimization to remedy joint-torque instability/divergence for redundant robot manipulators[J].Robotics and Autonomous Systems,2012,60(5):874-886.
[9]TIAN Qiang,CHEN Liping,ZHANG Yunqing,et al.An efficient hybrid method for multibody dynamics simulation based on absolute nodal coordinate figuretion[J].Journal of Computational and Nonlinear Dynamics,2009, 4(2): 1-13.
[10]WU Jun,WANG Jinsong,YOU Zheng.A comparison study on the dynamics of planar 3-DOF 4-RRR, 3-RRR and 2-RRR parallel manipulators[J].Robotics and Computer Integrated Manufacturing,2011,27(1):150-156.
[11]彭宇.非经性智能观测器及其应用研究[D].杭州:浙江大学,2000:13-23.
[12]赵文杰.不确定非线性系统的变结构控制研究[D].北京:华北电力大学,2004:25-33.
[13]TITOV V,SHARDYKO I,ISAENKO S.Force-torque control implementation for 2 DoF manipulator[J].Procedia Engineering,2014,69(1):1232-1241.
[14]LI Zhiyun,YANG Yipeng,LI Jianxun.Adaptive motion force control of mobile under-actuated manipulators with dynamics uncertainties by dynamic coupling and output feedback[J].IEEE Transactions on Control Systems Technology,2010,18(5):1068-1079.
(责任编辑: 黄晓楠英文审校: 杨建红)

Input Torque Optimization of a Double Degree of
Freedom Serial Manipulator
ZHANG Anmin1, ZHAO Wu2
(1. Department of Mechanical and Engineering, Luzhou Vocational and Technical College, Guang′an 646000, China;
2. College of Manufacturing Science and Engineering, Sichuan University, Mianyang 621000, China)
Abstract:As for the problem that the input torque of the serial manipulator actuator is large in the executing process, which leads to the instability of the mechanism motion, a double degree of freedom serial manipulator kinematic sketch model is created. Using the energy minimization control method, the dynamic equation of the energy control is constructed. Manipulator joint angle, the quality of connecting rod, and the distance between joints are analyzed, then the optimization equation are determined. Taking the optimization method to calculate the input torque control equation, the optimal size of the input torque is obtained. Combining with concrete examples, the optimized input torque is simulated in the Matlab/Simulink software. Results show that compared with the simulation results before optimization, the optimized design of the manipulator input torque is smaller, the overall fluctuation is relatively stable and the result is better.
Keywords:manipulator; series; double degree of freedom; input torque; dynamic equation; simulation analysis
基金项目:四川省科技计划项目(2013GZ0126)
通信作者:张安民(1965-),男,副教授,主要从事机械制造及制造业信息化的研究.E-mail:201509zhangam@sina.com.
收稿日期:2015-10-10
中图分类号:TP 241
文献标志码:A
doi:10.11830/ISSN.1000-5013.2016.01.0012
文章编号:1000-5013(2016)01-0012-05
猜你喜欢
故事作文·低年级(2023年11期)2023-12-05 06:39:56
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
故事作文·低年级(2023年12期)2023-03-24 14:16:52
科技创新与应用(2016年33期)2016-12-17 12:31:48
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:11:04
中小企业管理与科技·上旬刊(2016年10期)2016-11-15 10:03:03
中国科技博览(2016年22期)2016-11-01 13:48:02
中国环境监察(2016年7期)2016-10-23 05:36:30
中国现当代社会文化访谈录(2016年0期)2016-09-26 08:46:23
通信电源技术(2016年1期)2016-04-16 04:57:29