
基于多元角域指标离群检测的风电齿轮箱故障预警方法
2016-01-12 10:30:56顾煜炯,宋磊,苏璐玮等
振动与冲击 2015年1期
关键词:多元统计分析
基于多元角域指标离群检测的风电齿轮箱故障预警方法
顾煜炯,宋磊,苏璐玮,吴冠宇,周振宇
(华北电力大学新能电力系统国家重点实验室,北京102206)
摘要:针对风速和载荷随机波动造成的早期故障特征难以提取和量化的特点,提出基于多元角域指标离群检测的风电齿轮箱故障预警方法。首先利用阶比重采样技术将非平稳的时域振动信号转化为具有平稳或准平稳特性的角域信号,提取角域无量纲指标反映风电齿轮箱早期故障趋势;其次利用多元相关度测量建立风电齿轮箱早期故障识别模型;最后采用多元离群检测方法实现风电齿轮箱早期故障预警。实验表明,该方法能够实现较为准确地的风电齿轮箱早期故障预警,具有较好的工程实际意义。
关键词:阶比重采样;角域无量纲指标;多元统计分析;多元离群检测
中图分类号:TH132.4文献标志码:A
基金项目:总装十二五预研基金
收稿日期:2013-10-21修改稿收到日期:2014-01-09
Earlywarningmethodforwindturbinegearboxbasedonmultivariateoutlierdetectionofangledomainparameters
GU Yu-jiong, SONG Lei, SU Lu-wei, WU Guan-yu, ZHOU Zhen-yu(StateKeyLaboratoryOfAlternateElectricalPowerSystemWithRenewableEnergySources,NorthChinaElectricPowerUniversity,ChangpingDistrict,Beijing102206,China)
Abstract:In view of the difficulties in extracting and quantifying the early faults features under fluctuation working conditions,a fault warning method for wind turbine gearbox based on multivariate outlier detection was proposed. After,transforming the non-stationary time domain signals into stationary angle domain signals, the dimensionless angle domain parameters were extracted to reflect the early wind turbine gearbox faults. A early faults cognition model was then established based on correlation measure analysis and the early warning of wind turbine gearbox faults was realized by means of multivariate outlier detection. The experimental results show that the method can achieve early warning more accuratly and has good practical significance.
Keywords:orderresampling;angledomaindimensionlessparameters;statisticalanalysis;multivariateoutlierdetection
风电齿轮箱作为变速传动机构,工作环境恶劣,部件间耦合性强,长期运行在交变载荷和冲击载荷下,易发生齿轮点蚀、磨损及轴承表面损伤等故障[1]。权威机构长期统计发现风电齿轮箱虽不是故障率最高的系统,但其故障引起的停机时间最长、损失最大,对机组运行造成的影响最大[2]。因此广泛的开展风电齿轮箱早期故障预警工作,防止隐患发展成故障和事故,对减少机组的维修成本和时间具有重要意义。
目前针对齿轮箱的诊断方法有:小波包滤波和循环平稳度分析[3],EMD降噪和谱峭度法[4],时频分析与阶比跟踪[5]等,但由于风电齿轮箱的变速、变负荷运行特性使得风电齿轮箱振动频率复杂,具有明显的非线性、非平稳性,难以扑捉和提取早期故障特征。针对风电齿轮箱目前尚缺乏有效的数据分析方法实现风电齿轮箱早期故障的在线预警,本文提出基于多元角域指标离群检测的风电齿轮箱故障预警方法,通过提取风电齿轮箱角域振动信号指标准确、有效地挖掘风电齿轮箱早期异常征兆,利用相关性分析建立基于多元统计分析的风电齿轮箱故障识别模型,最终利用多元离群检测实现风电机组早期故障的在线预警。
1基于阶比重采样的角域特征值提取
近年来设备维修诊断人员越发关注无量纲幅域参数,它们对幅值能量变化不是很敏感,与机器工作条件关系不大,但对设备故障具有足够的敏感性,并且计算简单,便于在线应用[6]。郭厚明[7]利用不同无量纲参数对不同齿轮故障的敏感性不同对重载齿轮的磨损、点蚀和断齿故障进行了识别。Dou等[8]利用六种时域和五种频域无量纲指标作为知识库知识来实现旋转机械的早期故障诊断工作。研究表明无量纲参数特征提取技术已经成功的应用到旋转机械故障诊断领域,但对于变工况运行条件下的旋转机械早期故障特征提取的研究稍显不足,缺乏有效的故障特征提取技术解决风电齿轮箱故障的早期预警问题。
本文针对变转速特性下风电齿轮箱早期故障特征难以准确提取问题,提出基于阶比重采样角域特征提取的方法,通过构建新的角域指标有效的实现了风电齿轮箱早期潜在隐患的挖掘,为风电齿轮箱的在线故障预警奠定了技术基础。
1.1阶比重采样
风电齿轮箱的振动与转速存在密切关系,转速的随机波动会造成振动信号的非线性、非平稳性,难以准确的提取信号特征反映设备的运行状况[9]。阶比重采样是一种通过软件计算的方式实现基于振动和转速信号同步采样的采集方式,即无论机组的转速为多少,每一转的采样点数是一样的。阶比重采样方法利用插值计算方法实现等时间采样方式向等角度采样方式的转化,其原理如图1所示。该方法有效地避免了传统硬件阶比分析设备昂贵、安装不便的不足,具有较高的计算精度,便于实现风电齿轮箱的在线实时分析。
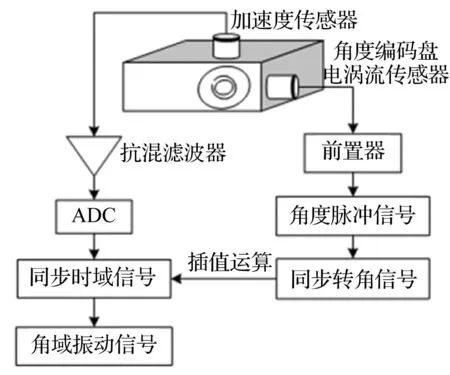
图1 阶比重采样原理图 Fig1 The theory of order resampling
假设等时间间隔{t1,t2,…,ti,…,tn}采样下的时域振动信号为{x1,x2,…,xi,…,xn},与其同步采样的角度脉冲△θ对应的时间序列为{t1,t2,…,tj,…,tm},由同步采样角度脉冲可以推算出同步转动角度曲线θ(tj),其中tj∈{t1,t2,…,tj,…tm},上述定义中n,m分别表示时域信号采样点数和同步角度脉冲数目。


1.2风电齿轮箱角域特征值提取
传统的无量纲幅域参数是与能量有关的指标,会受到剧烈工况负荷变化的干扰,或因能量变化不明显而失去故障特征量的意义,因此传统的无量纲幅域参数难以实现设备变工况特性下的早期故障特征提取和趋势量化。本文提出基于阶比重采样的角域特征提取方法,阶比重采样后的角域信号保证了角域振动相位的周期性,即符合新角域无量纲因子的整周期性,能够准确的反映风电齿轮箱的故障发展趋势。
本文构建了基于阶比重采样角域信号的新无量纲幅域指标:峭度指标Kf,波形裕度CL,偏态因子SK,重复性因子Rf,相似性因子Ff,跳跃性因子Jf。
(1)峭度指标Kf:Kf与轴系转速、尺寸、载荷等无关,对冲击信号特别敏感,适用于表面损伤类故障、尤其是早期故障的诊断,其特点是随着表面损伤类故障程度的加深,峭度指标的绝对值越来越大,求解公式为
(1)
(2) 波形裕度CL和偏态因子SK:这两者属于振动信号形态谱指标,其从振动信号形状角度识别信号的微小变化,反复实验证明波形形态谱因子CL、SK可以作为旋转设备早期故障特征量,较好的反映早期故障趋势,两者公式为
(2)
(3)

(4)

(5)
(4)相似性因子Ff:利用计算分形维数来得到,首先为了降低对幅值变化的敏感,需要将数据作标准化处理,其公式为
(6)
式中,xλ(ti)表示时间时刻ti下的记录幅值;xλ(ti)max表示时间序列中记录幅值的最大值,j={1,2…n};K>1,K是一个比例放大因子,一般取整数,可根据经验确定。分形锥度盒维数要求覆盖单元具有自相似性,并要求曲线具有严格的自相似性,往往在振动信号检测中被广泛应用。其定义为设F是s实数集合Rn中任一非空有限子集,记N(F,ξ)表示最大直径为ξ且能覆盖F集合最小数,则F的盒维数定义为(In()表示以e为底的对数)
(7)
即取相似性描述因子Fλ=dimBF。

(8)
即取跳跃性描述因子Jf=Dx。
1.3案例分析
以张北某风电场某1.5MW风电机组为例,通过2012年3月份底的二年检记录发现齿轮箱高速级输出轴轴承已经发生严重磨损,该轴承测点振动数据从2月中旬开始出现异常变化。截取该测点2月份29天振动历史数据进行研究,其中每天采集1s中数据作为样本数据。
以第一天的1s样本数据为例进行阶比重采样,图2(a)表示该测点1s时域振动信号,图2(b)表示为重构后的角域振动信号。
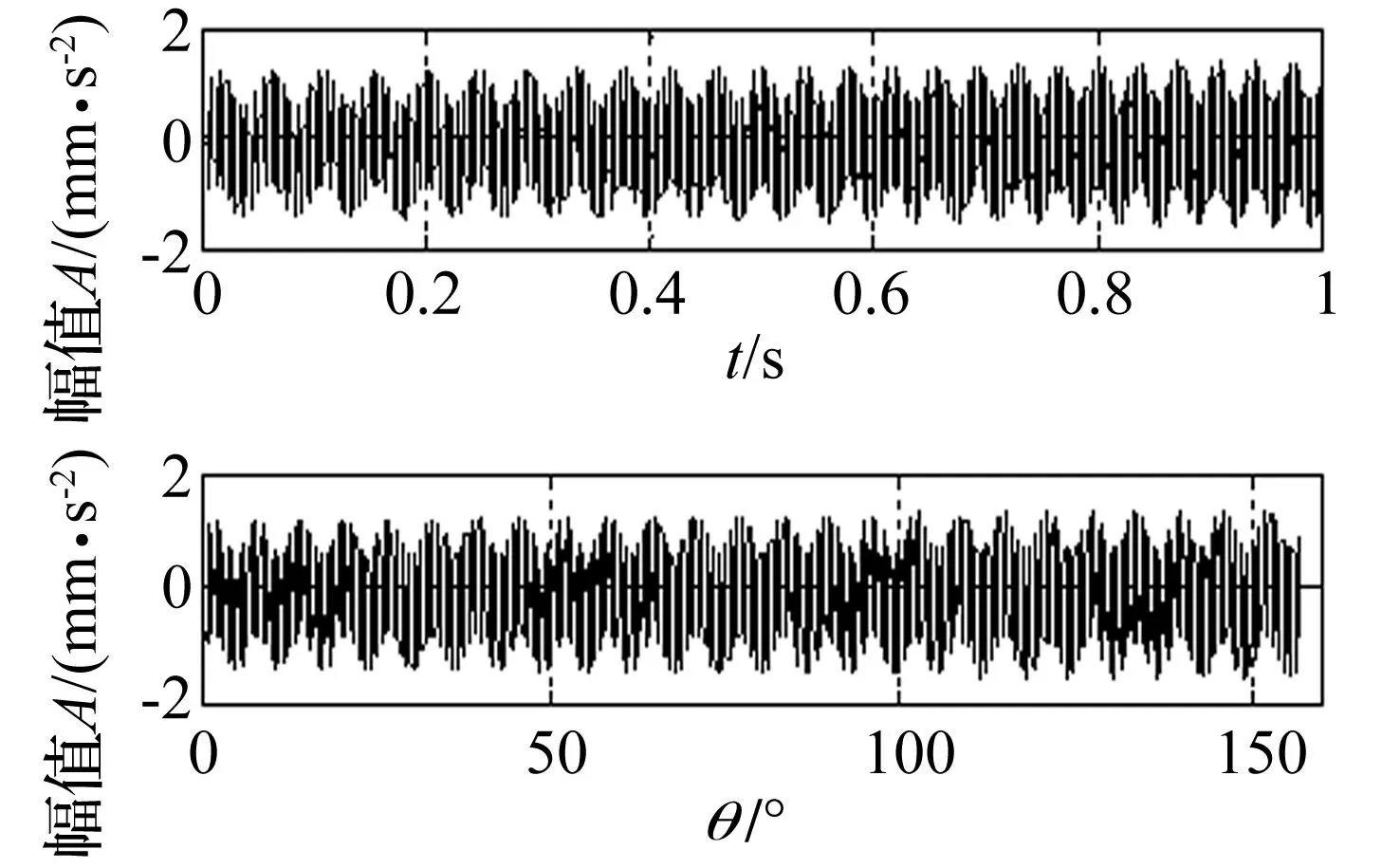
图2 样本数据时域信号和阶比重采样角域信号 Fig.2 The time domain and Angle domain of sample data
研究2012年2月份29天的历史样本数据,以高速级输出轴每转为周期对重构后的角域信号进行划分并提取关联角域指标。图3为峭度指标Kf与波形裕度CL。图4、5分别为振动烈度和有量纲幅域参数。
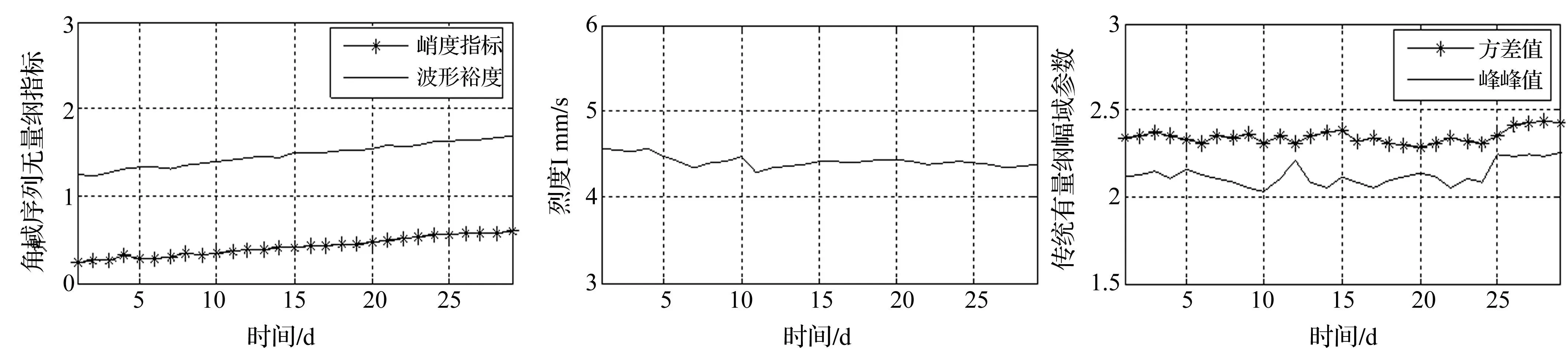

图3 2月份内角域无量纲指标趋势变化图Fig.3ThechartofnewdimensionlessparametersinFeb图4 2月份内振动烈度趋势变化图Fig.4ThetrendchartofvibrationintensityinFeb图5 2月份内有量纲幅域参数趋势变化图Fig.5ThechartoftimedomaindimensionalparametersinFeb
由图2与图3可得,新构建角域无量纲指标峭度指标Kf与波形裕度CL与振动烈度相比对风电齿轮箱早期故障具有较好的敏感性;由图2与图4可得,新的角域无量纲指标与传统有量纲幅域参数相比能够更准确的提取风电齿轮箱的早期故障特征。因此基于阶比重采样的角域信号特征提取技术能够及时准确的实现风电齿轮箱早期故障趋势分析。
2基于相关度测量的早期故障预警模型建立
借助新无量纲角域指标对变工况设备运行特征提取的优势,利用不同特征值对各故障的鉴别度和灵敏度区别,采用适当的方法对故障进行识别和和分类是至关重要的。胡金海[10]提出粗糙核主元分析法实现对轴承故障特征的选取和优化;赵志宏[11]提出基于独立分量分析和相关系数的机械故障特征提取方法,实现不同工况下振动信号原始数据特征的直接提取,取得较好的工程应用价值。Maurya[12]利用主元分析法实现设备故障诊断过程的运行趋势量化分析。本文基于多元统计和主分量分析建立风电齿轮箱典型故障模式的预警模型。
对张家口某风场33台1.5MV机组的2010年~2013年检修记录统计分析,选取风电齿轮箱故障率较高的风电齿轮箱高速级齿轮点蚀、高速级齿轮磨损、高速级轴承表面损伤和联轴器不对中四种故障重点研究,基于相关度测量的方法利用构建的六种角域指标峭度指标Kf,波形裕度CL,偏态因子SK,重复性因子Rf,相似性因子Ff,跳跃性因子Jf建立四种故障的识别模型。
2.1角域指标的相关度测量技术
假设Ai为设备信号样本的第i个主分量特征表示,Xj为原始数据向量,两者之间的相关度采用相关系数的绝对值:
(9)

(10)

2.2风电齿轮箱故障识别模型的建立
本文拟通过相关度计算方法来实现四种故障模式与多元角域指标间的关联分析。为了保证角域原始数据和角域指标向量维数的相同,首先利用计算角域序列幅值均值的方法将角域数据转化为与角域指标维数相同的原始数据向量{x1,x2, …,xj, …,xn},


表1 故障模式与角域指标相关度测量结果
由表1相关度测量结果可得,拟解决故障模式与多角域指标间的关联关系如表2所示。选取相关度较高的前两个指标作为各故障模式的关联指标。
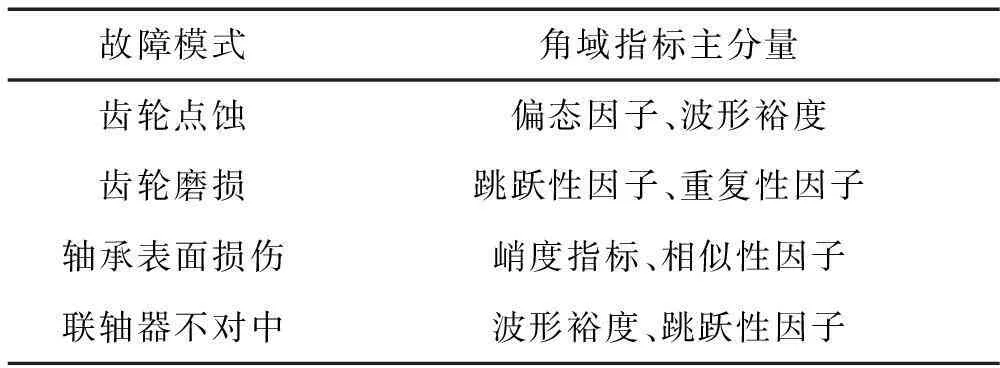
表2 风电齿轮箱故障识别模型
2.3模型仿真验证
针对风电齿轮箱联轴器不对中故障机理分析和动力学分析,建立联轴器不对中的故障数学模型对该故障进行仿真模拟。仿真风电齿轮箱输出转速由1 800r/min到2 200r/min的升速过程中发电机前轴承座径向振动,为研究联轴器不对中故障对机组振动的影响,仿真信号前4/5时间段由正常信号组成,后1/5时间段由轻微故障信号构成。该仿真过程中转速信号和对应的角速度信号方程分别为:
roto=1800+400×t
(11)
omega=60×π+40×π/3×t
(12)
在Matlab中运用积分函数在时间t上对角速度进行积分,获得转角方程:
theta=int(omega,t)
(13)
针对已获得的转角函数构造联轴器不对中故障仿真信号,其中1 s仿真振动数据中前0.8s为正常振动数据,后0.2 s为联轴器不对中故障振动数据,其仿真函数分别为:
vibra1=A×[sin(18×theta)+
0.3×sin(theta)]
(14)
vibra2=A×[sin(18×theta)+0.3×
sin(theta)+0.1×sin(2×theta)]
(15)
从而获得如图6所示的时域及角域仿真信号。
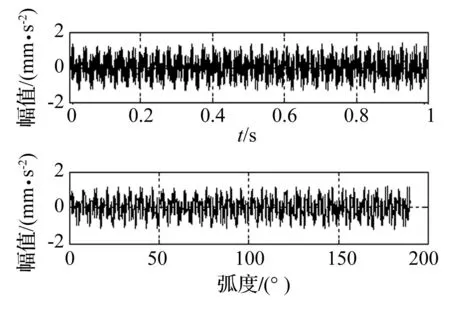
图6 仿真时域振动信号和重构角域振动信号 Fig.6 The simulation signal of time domain and angle domain
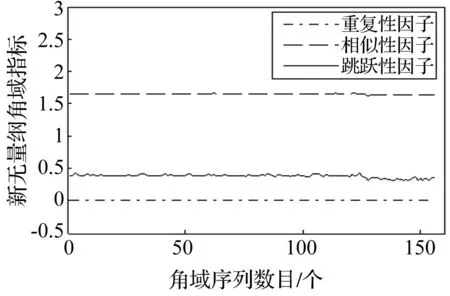
图7 新无量纲角域指标趋势变化图 Fig.7 The chart of angledomain dimensionless parameters
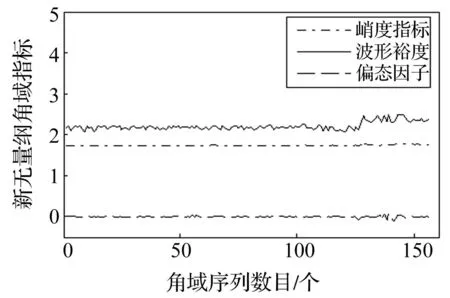
图8 新无量纲角域指标图趋势变化图 Fig.8 The chart of angledomain dimensionless parameters
对具有整周期特性的角域振动信号按照旋转周期进行角域序列划分,提取角域振动序列的新无量纲角域指标,观察该过程中新角域指标的变化趋势。
由图7、图8可得,风电机组联轴器不对中故障发展过程中波形裕度和跳跃性因子具有较好的敏感性和渐变性,能够准确的反映机组联轴器不对中故障的早期发展趋势。仿真验证了2.2中采用相关度测量建立的故障模式与新角域指标关联模型的准确性。
3基于多元离群检测的风电齿轮箱故障预警
基于多元统计的风电齿轮箱故障预警建模,建立了风电齿轮箱不同故障模式的关联模型,由建模过程可得,由于风电齿轮箱故障的形成和发展受到各种因素的影响,判断故障的发生与否仅仅通过单值指标往往是缺乏准确度,因此本文提出基于多元角域指标离群检测的风电齿轮箱故障预警方法。
对于多元高斯观测,使用类似于单变量高斯分布的方法。特殊地如果点关于估计的数据分布具有低概率,则将把它们分类为离群点。此外,希望能够用简单的检验方法,即点到分布中心点的距离来进行判定。然而,由于不同变量之间的相关性,多元正态分布并不关于它的中心对称。图8显示一个二维多元高斯分布的概率密度,该分布均值为(0,0),协方差为
(11)
对于多元指标融合一个阈值来决定对象是否为离群点,则需要一种考虑数据分布形状的距离度量,即Mahalanobis距离不仅仅考虑距离因素,它将样本数据的原始形状也作为衡量数据利群度的影响因素。点x与数据均值x之间的Mahalanobis距离如下所示。

图9 多元正高斯分布的概率密度 Fig.9 Probability density of multivariate gaussian distribution
(12)
式中,S是数据的协方差矩阵,S-1是协方差矩阵S的逆矩阵。通过Mahalanobis距离能够检测对象的离群程度[14-15]。
本文提出基于多元离群检测技术的风电齿轮箱故障预警方法,首先将振动测点通过阶比重采样后的角域信号划分为角域序列,通过提取角域指标将角域序列转化为多维角域指标向量,训练大量的机组在各状态阶段运行时的角域信号获得多元离群检测的距离中心。另外通过大量的训练各故障模式下机组的角域振动数据以获得各种故障模式下的多元离群检测边界距离值,其中多元离群检测边界距离训练公式为
Bmahalanobis=(xmax-x′)S-1(xmax-x′)T
(13)
式中xmax表示机组在各状态阶段运行时关联角域指标的最大值向量,x′表示为各状态阶段运行时关联角域指标的参考均值向量,因此超过多元离群检测边界值的检测对象即为离群对象。定义多元离群检测因子ASF作为机组故障预警的直接触发指标:
(14)
式中i表示为设备运行状态阶段值,n表示所检测阶段的离群对象个数,N表示离群检测总体样本数据个数,ASF越大表明故障程度越深,通过训练机组海量监测数据来设置故障在不同阶段的检测边界可实现风电齿轮箱的等计划预警工作。
4案例分析
图10齿轮箱故障模拟试验台可模拟直齿的齿面磨损、齿面点蚀或断齿故障,也可以模拟轴承内圈、外圈、滚动体故障。试验台左侧为可编程变速电机可实现变速电机的随意调速,右侧为磁力制动器可随意调节负载,因此试验台可模拟齿轮箱的变转速变负载运行情况。另外试验台配备成套的故障齿轮和故障轴承,可模拟齿轮点蚀、齿轮磨损、轴承表面损伤及联轴器不对中等具有渐变性的故障。

1-调速电机 2-转速控制器 3-联轴器 4-齿轮箱 5-磁力制动器 图10 齿轮箱故障模拟试验台 Fig.10 Fault simulation rest-bed of gearbox
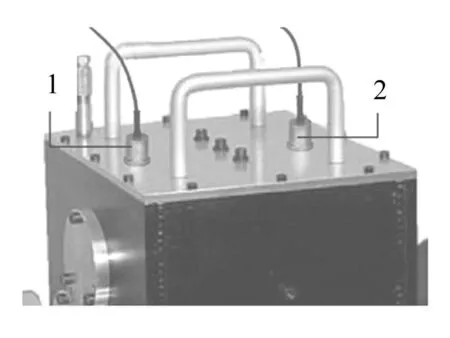
1-第一传动级振动测点 2-第二传动级振动测点 图11 齿轮箱试验台振动传感器布置图 Fig.11 The layout of vibration sensors for gearbox test-bed
试验台变速电机后依次为联轴器和两平行级齿轮箱,齿轮箱内置滚动轴承和直齿轮部件,其部件参数如表3所示。齿轮箱设计便于故障套件的更换和各类传感器的安装。

表3 试验台齿轮箱主要技术参数
本文针对齿轮点蚀、齿轮磨损、轴承表面损伤和联轴器不对中故障提出的故障预警方法具有相同的技术路线,因此本文拟通过模拟齿轮箱的齿轮点蚀故障来验证预警方法的有效性。点蚀为金属表面出现纵深腐蚀小孔,又叫孔蚀。风电齿轮一般由于低速重载的啮合齿面间多呈混合或边界润滑状态,在局部较高接触及剪切应力和相对摩擦作用下,导致齿面局部温升,油膜或化学反应膜破裂而产生的齿面裂纹和材料位移。由于机组安装精度低、润滑不良等均会造成齿轮点蚀的产生,并且随着齿轮运行环境的恶化和长期交变载荷作用,风电齿轮往往会由局部点蚀发展成面状点蚀,进而会由单齿点蚀发展成多齿点蚀,因此本文通过控制点蚀齿数来模拟齿轮点蚀的渐变性过程。
本文试验台故障齿轮套件分别含有1个齿点蚀、2个齿点蚀、4个齿点蚀和10个齿点蚀的故障齿轮,通过更换不同点蚀齿数的齿轮来模拟齿轮点蚀故障的渐变性。本文中通过编程控制变速电机在0.5h内由300r/min匀变速到650r/min,然后在接下来0.5h内由650r/min匀变速到300r/min,另外每隔半小时调整磁力制动器一次,以便模拟变速变负载工况。试验过程中保证正常齿轮套件运行5个小时,1齿、2齿、4齿和10齿点蚀套件分别运行1个小时,在齿轮箱第一传动级靠近轴承座的箱体处布置振动加速度传感器来测量轴承座径向振动,其振动加速度传感器布置如图10所示, 1、2测点分别为第一、第二传动级的振动加速度传感器安装点,其振动测点采样频率均为4 096Hz。
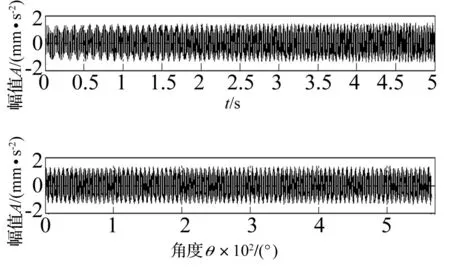
图12 齿轮箱正常运行时样本数据的时域及角域振动信号 Fig.12 The time and angle domain vibration signal of gearbox under normal condition
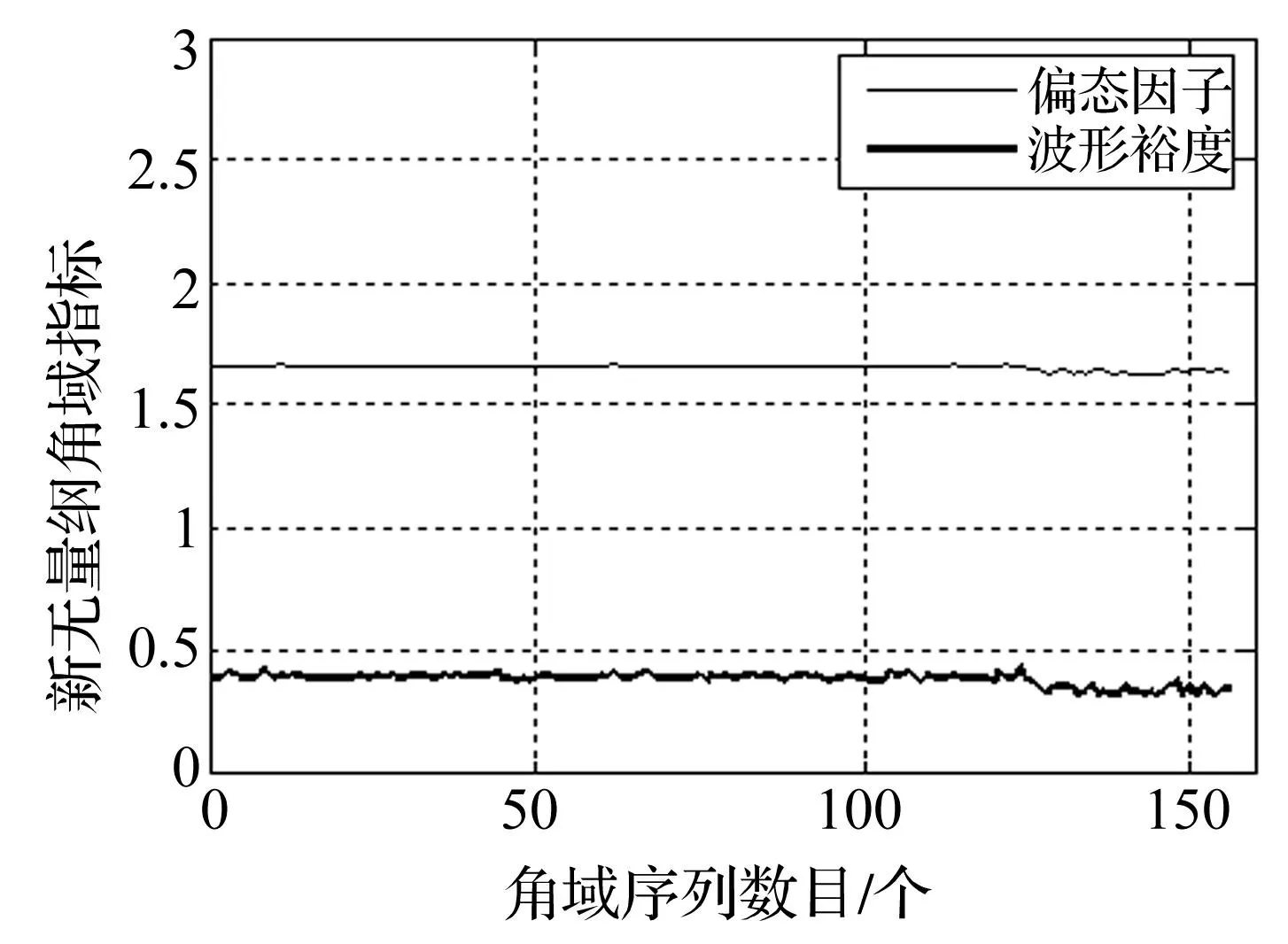
图13 齿轮点蚀关联角域指标趋势变化图 Fig.13 The trend chart of angle domain factors of gear pitting
首先保证齿轮箱安装正常齿轮箱套件连续运行5h,并每小时采集1s数据作为样本数据,通过阶比重采样对关联角域指标进行训练,以得到多元离群检测的实时检测训练样本集合。图12为齿轮箱正常运行时5s样本数据的时域信号和重构角域信号。
依次更换齿轮套件中的各故障齿轮,分别运行1个小时并每小时采集1s数据作为样本数据,将齿轮箱在四种故障齿轮套件下运行的样本数据按照时间发展顺序依次替换正常运行时的5s样本数据来模拟齿轮点蚀故障的渐变性过程,即始终保持被检测振动序列长度为5s对应的角域序列,图13为齿轮点蚀故障模拟过程中关联角域指标的趋势变化图。
由图13可得,偏态因子和波形裕度对齿轮箱点蚀故障具有较好的敏感性和渐变性,适合作为齿轮箱齿轮点蚀故障的早期预警指标,采用多元离群检测技术对齿轮点蚀过程进行分析并实现故障预警。
在模拟齿轮点蚀故障的过程中,计算每种齿轮运行状态下的多元离群检测边界值BMahalanobis,BMahalanobis通过公式(13)并利用各齿轮运行状态下的角域指标均值
向量和最大值向量进行计算,其中各齿轮运行状态下的多元离群检测边界值参数如表4所示。
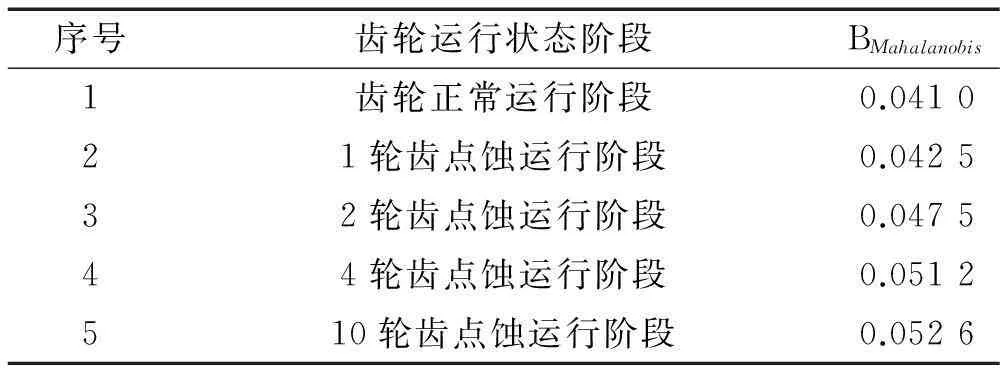
表4 齿轮正常及各故障阶段的离群检测边界值
由于多元离群检测技术依据数据的分布形状来判定异常点的存在,因此在不同的齿轮运行状态阶段,多元离群检测的参数会发生实时的变化。由表4可得随着齿轮点蚀故障程度的加深,多元离群检测过程的参考中心和异常边界值均会发生变化,根据不同的BMahalanobis利用多元离群检测原理对各齿轮运行状态下的角域指标向量进行多元离群检测,其检测结果如图14(a)~(e)所示。
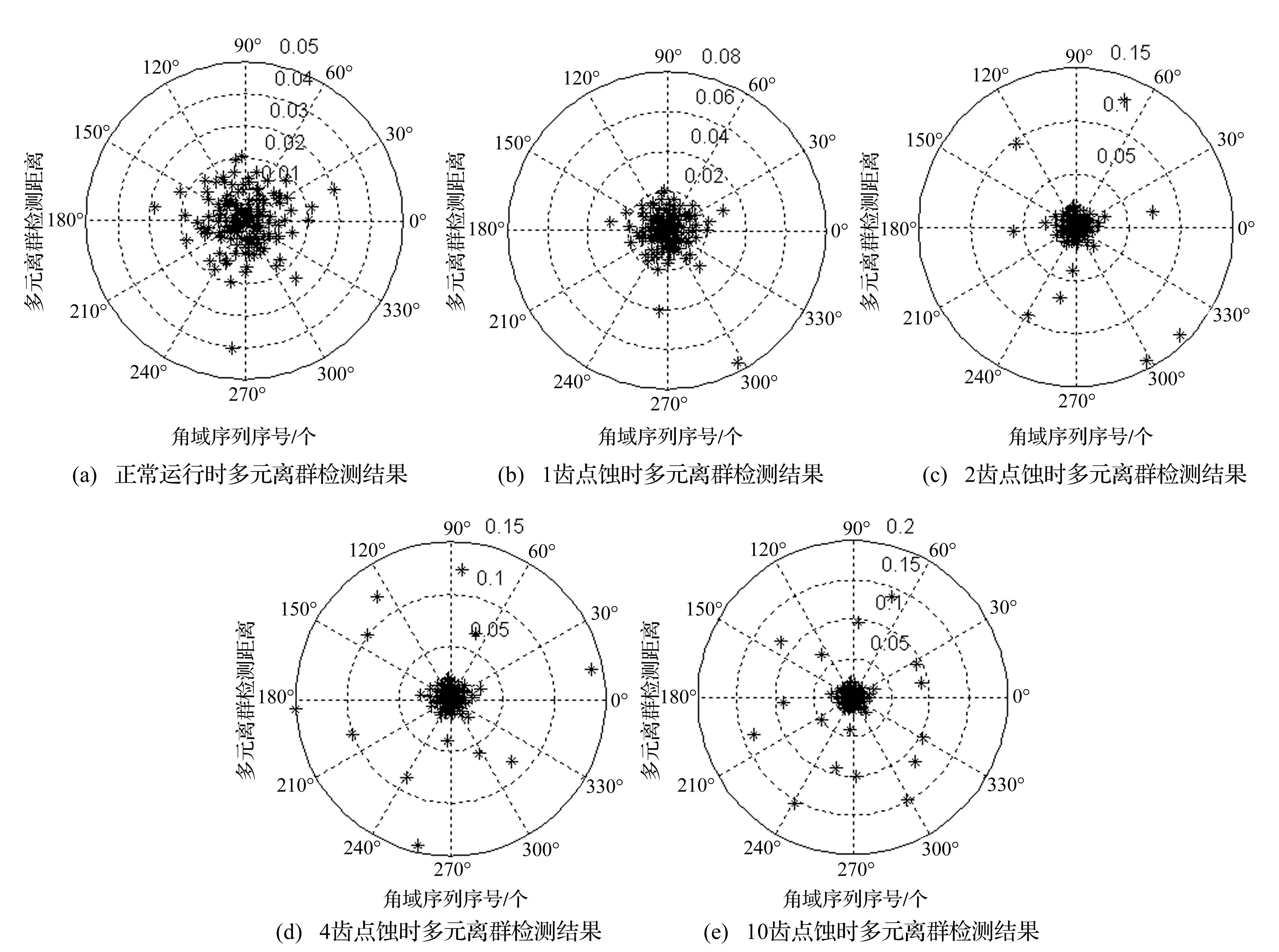
图14 齿轮点蚀模拟故障的多元离群检测趋势变化图 Fig.14 The trend chart of multivariant outlier detection of gear-pitting simulated fault
由图14(a)~(e)可观察齿轮箱由正常到齿轮点蚀故障加剧过程中基于多元角域指标离群检测的趋势变化图,多元离群检测因子ASF的变化趋势如表5所示,可见随着ASF因子越大表明齿轮点蚀故障越发严重,因此可通过设置离群检测因子阈值来实现风电齿轮箱故障的预警工作。
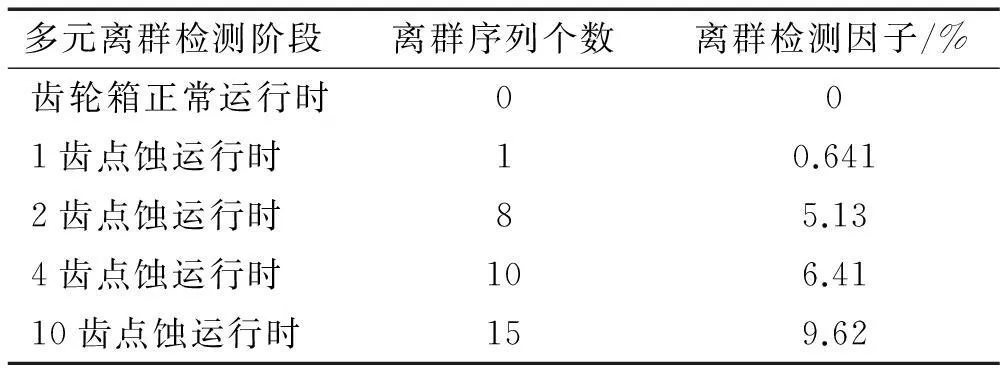
表5 齿轮点蚀故障多元离群检测结果
试验结果表明,本文提出的基于多元角域指标离群检测的风电齿轮箱故障预警方法能够有效的反映变转速背景下风电齿轮箱早期故障发展趋势,并能形成风电齿轮箱故障严重程度的量化指标,及时、准确的实现风电齿轮箱故障的早期预警。
5结论
(1)基于阶比重采样的角域特征值提取技术不仅能够将非线性、非平稳性的时域振动信号转化为具有平稳特性的角域振动信号,而且也是保证新无量纲角域指标能够准确的反映风电齿轮箱变速变负荷运行条件下的早期故障趋势的基础;
(2)基于多元统计的风电齿轮箱故障预警建模利用主分量分析方法建立了风电齿轮箱各典型故障模式与故障特征值间的关联性,通过多元特征值统计有效的识别出风电齿轮箱故障模式;
(3)多元离群检测技术在风电齿轮箱故障预警中的应用,解决了仅通过某单值阈值预警低可信度的弊端。利用基于多元角域指标离群检测技术,制定了合理的、准确的风电机组故障预警机制,有效避免了在线预警的“误报”、“延报”的现象。
参考文献
[1]孙自强,陈长征,谷艳玲,等.基于混沌和取样积分技术的大型风电增速箱早期故障诊断[J].振动与冲击,2013,32(9):113-117.
SUNZi-qiang,CHENChang-zheng,GUYan-lingetal.Incipientfaultdiagnosisoflargescalewindturbinegearboxbasedonchaostheoryandsamplingintegraltechnology[J].JournalofVibrationandShock,2013,32(9):113-117.
[2]张青.风力发电机齿轮箱振动监测与故障诊断系统的研究[D].上海:华东理工大学,2012.
[3]周福昌,陈进,何俊.基于小波滤波与循环平稳度分析的滚动轴承早期故障诊断方法[J].振动与冲击,2006,25(4):91-93.
ZHOUFu-chang,CHENJin,HEJun.Applicationofcyclostationarysignalprocessingwithwaveletfilteringinrollingelementbearingfaultdiagnosis[J].JournalofVibrationandShock,2006,25(4):91-93.
[4]苏文胜,王奉涛,张志新,等.EMD降噪和峭度法在滚动轴承早期故障诊断中的应用[J].振动与冲击,2010,29(3):18-21.
SUWen-sheng,WANGFeng-tao,ZHANGZhi-xin,etal.ApplicationofEMDdenoisingandspectralkurtosisinearlyfaultdiagnosisofrollingelementbearings[J].JournalofVibrationandShock,2010,29(3):18-21.
[5]程利军,张英堂,李志宁,等. 基于时频分析及阶比跟踪的曲轴轴承故障诊断研究[J].振动与冲击,2012,31(19):73-78.
CHENLi-jun,ZHANGYing-tang,LIzhi-ning.Faultdiagnoseofanengine’smainbearingbasedontime-frequencyanalysisandordertracing[J].JournalofVibrationandShock,2012,31(19):73-78.
[6]徐小力,王红军.大型旋转机械运行状态趋势预测[M].北京:科学出版社,2011.
[7]郭厚明,行志刚.无量纲参数在矿用低速重载齿轮故障诊断中的应用[J].煤炭科学技术,2006,34(8):28-31.
GUOHou-ming,XINGZhi-gang.Dimensionlessparametersappliedtofaultdiagnosisofminelowspeedheavyloadedgear[J].CoalScienceandTechnology,2006,34(8):28-31.
[8]DouDong-yang,YangJian-guo,LiuJiong-tian.Arule-basedintelligentmethodforfaultdiagnosisofrotatingmachinery[J].Knowledge-BasedSystems,2012,1(8):1-7.
[9]张亮,风力发电机组齿轮箱早期故障诊断方法研究[D]. 大连:大连理工大学,2010.
[10]胡金海,谢寿生,侯胜利.粗糙核主元分析方法及其在故障特征提取中的应用[J].振动与冲击,2008,27(3):50-55.
HUJin-hai,XIEShou-sheng,HOUSheng-li.Roughkernelprincipalcomponentanalysisanditsapplicationinfaultfeatureextraction[J].JournalofVibrationandShock,2008,27(3):50-55.
[11]赵志宏,杨绍普,申永军.基于独立分量分析与相关系数的机械故障特征提取[J].振动与冲击,2013,32(6):67-72.
ZHAOZhi-hong,YANGShao-pu,SHENYong-jun.Machineryfaultfeatureextractionbasedonindependentcomponentanalysisandcorrelationcoefficient[J].JournalofVibrationandShock,2013,32(6):67-72.
[12]MauryaMR,RengaswamyR.Faultdiagnosisbyqualitativetrendanalysisoftheprincipalcomponents[J].ChemicalEngineeringResearchandDesign,2005,83 (A9) :1122-1132.
[13]李爱国,库向阳.数据挖掘原理、算法及应用[M].西安:西安电子科技大学出版社,2011.
[14]WordenK,MansonG,FiellerNJ.Damagedetectionusingoutlieranalysis[J].JournalofSoundandVibration, 2000,229(3):647-667.

第一作者王艳丰女,工程师,1984年8月生
通信作者朱靖男,高级工程师,1982年3月生
猜你喜欢
经济师(2017年6期)2017-08-26 12:01:13
农家科技中旬版(2017年6期)2017-08-15 11:54:07
农业与技术(2017年12期)2017-07-11 11:33:01
经济研究导刊(2016年29期)2017-05-26 23:11:51
中国远程教育(2017年3期)2017-04-14 00:30:08
中国管理信息化(2017年6期)2017-04-11 11:04:02
现代商贸工业(2017年5期)2017-03-29 19:20:01
中国经贸(2016年23期)2017-03-01 23:26:21
未来英才(2016年1期)2016-12-26 21:06:56
科技资讯(2016年19期)2016-11-15 10:06:37
