考虑空载损耗的IPMSM半实物实时仿真测试
2016-01-06 08:18黄苏融,李良威,高瑾等
电机与控制应用 2015年8期
考虑空载损耗的IPMSM半实物实时仿真测试*
黄苏融,李良威,高瑾,黄洋
(上海大学 机电工程与自动化学院,上海200072)
摘要:提出了一种基于数字化虚拟电机的半实物实时仿真测试方法。利用FPGA构建了考虑空载损耗的内置式永磁同步电机(IPMSM)以及基于同步状态机的逆变器的虚拟电机系统。虚拟电机系统的仿真步长为1μs,逼近真实工况。采用dSPACE作为控制器,搭建了基于IPMSM虚拟电机系统的硬件在环(HIL)实时仿真平台。在四象限运行的车用电机实物平台上进行了电机的空载、负载工况下的矢量控制试验。通过与HIL试验结果的对比,验证了虚拟永磁同步电机系统的有效性和准确性。
关键词:虚拟内置式永磁同步电机系统; 空载损耗; 硬件在环; 半实物实时仿真
基金项目:* 国家863计划项目(2012AA111302);上海市科委项目(11511100503)
通讯作者:黄苏融
中图分类号:TM 301文献标志码: A
收稿日期:2014-01-31
Semi-Physical Real-Time Simulation and Test of
IPMSM Considering Noload Loss Effect
HUANGSurong,LILiangwei,GAOJin,HUANGYang
(School of Mechatronics Engineering and Automation, Shanghai University, Shanghai 200072, China)
Abstract:A real-time hardware in loop simulation test method of digital virtual motor was proposed. A virtual IPMSM system model close to the real conditions was established based on FPGA, the simulation step of which was 1μs, including IPMSM model considering no-load loss and inverter model based on synchronous state machine. Using dSPACE as the controller, a hardware in the loop (HIL) simulation platform of virtual IPMSM system based on FPGA was set up. The vector control experiments of no-load and load conditions had been done in the four quadrant operation physical platform of IPMSM for electric vehicles. By comparing HIL experimental results with physical platform results, the validity and accuracy of the virtual IPMSM system had been verified.
Key words: virtual interior permanent magnet synchronous motor system; noload loss; hardware-in-the-loop; semi-physical real-time simulation
0引言
永磁同步电机(Permanent Magnet Synchron-ous Motor, PMSM)具有体积小、效率高、能量密度大等优势,在电动汽车中得到了广泛应用。电动汽车PMSM的损耗和效率一直是研究的热点,建立考虑铁耗的PMSMd-q模型是在控制领域分析电机的损耗并研究效率提升的先决条件[1]。这些模型基于如下假设: (1) 只考虑可控的损耗、铁耗和铜耗;(2) 铁耗用等效的损耗电阻来表示。目前常用的d-q模型有两种: 一种是Roy S. Colby在1987年提出的在电感和旋转磁动势支路上并联等效铁耗电阻的数学模型[2],其能量流程分析类似于异步电机,电磁转矩计算复杂,要同时考虑铁耗电流和转矩电流分量;另一种数学模型是西北工业大学的刘卫国提出的一种在原有理想内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)的d-q模型前端并联等效铁耗电阻的数学模型[3],其不适合MATLAB仿真,仅能用于真实电机控制策略的制定,电机的能量流程分析是输入功率先消耗在铁耗上,然后消耗在定子绕组上,最后输出电磁功率。
硬件在环(Hardware in the Loop, HIL)半实物仿真是采用虚拟器件与真实控制器连接在一起进行实时仿真的技术,近年来广泛应用于通信、汽车、电机驱动等领域。在电机驱动领域,虚拟模型运行的时间步长应远小于PWM开关周期,为数微秒,故对于HIL逼近真实的主要挑战之一是高速的系统响应。2005年,Simon Abourda等人在RT-LAB上实现了10μs级的PMSM半实物仿真,但是RT-LAB高昂的价格却让人望而却步[4]。上海大学电驱动中心开发了基于FPGA的HIL实时仿真测试系统,采用verilog代码输入的方式建立包括电机和逆变器的虚拟电机系统,仿真步长为1μs[5]。2010年开发了五相IPMSM的HIL实时仿真平台[6],2011年开发了考虑电感饱和效应的定浮点混合运算的IPMSM的HIL实时仿真平台[7],2012年开发了车用异步电机的HIL实时仿真平台[8]。
为了提高建模精度,增强半实物仿真的可信度,本文采用了一种易于FPGA建模的d-q坐标系等效损耗电路模型。该模型符合PMSM的能量流程,电磁功率中考虑电机的铁耗、机械损耗等空载损耗的影响,并在此基础上构建了高精度的IPMSM定点数运算半实物实时仿真系统。通过与真实平台试验的对比,验证了模型的正确性与可行性。
1基于半实物仿真的IPMSM损耗模型的建立
考虑空载损耗的PMSMd-q模型如图1所示。图1中:Rs、Rc为定子绕组电阻和基波等效铁耗电阻,Ld、Lq为d、q轴电感,id、iq为d、q轴电流,idt、iqt为d、q轴转矩电流分量,idc、iqc为d、q轴铁耗电流分量,ωe为电机电角速度,ψd、ψq为d、q轴的磁链。
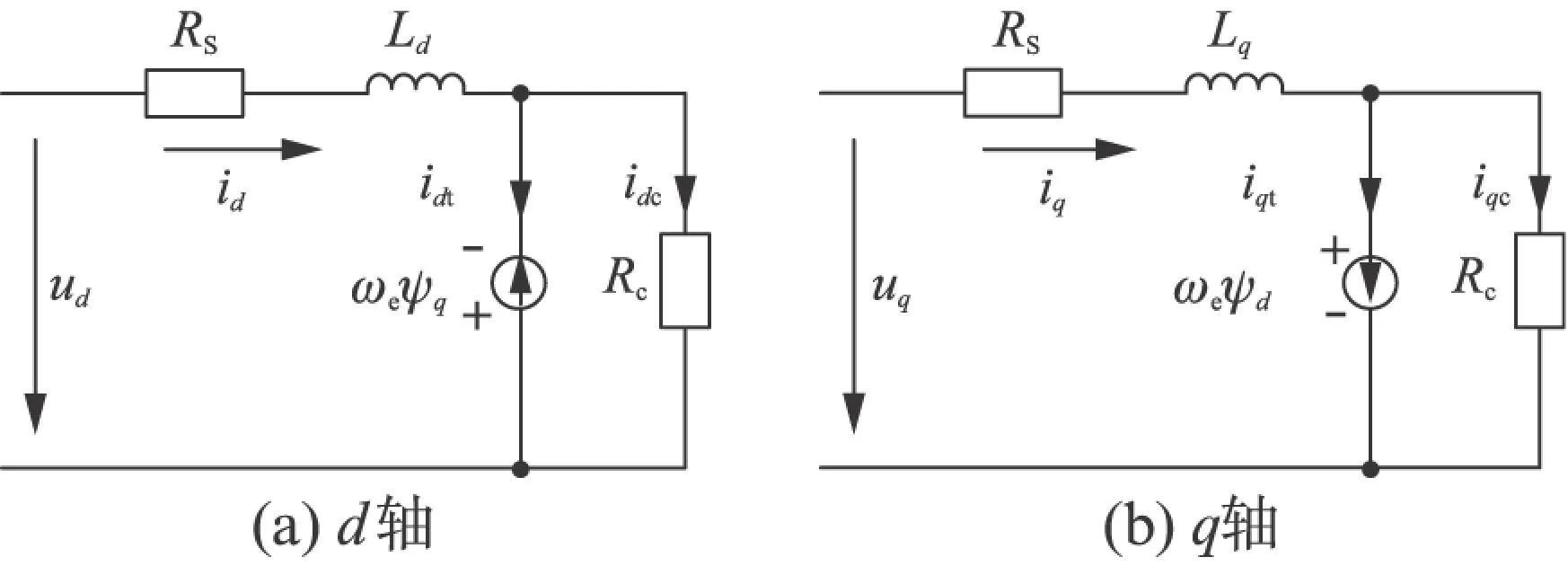
图1 考虑空载损耗的PNSM d-q模型
由伏安定律可得
(1)
式中:ψλ——永磁体磁链。
交、直轴磁链方程为
(2)
联立式(1)、式(2)可得等效模型的电压方程:
(3)
考虑损耗的模型与理想电机模型的电压方程是一样的,因为Rc支路与旋转磁动势支路是并联的,两条支路的电压是相同的,所以ψd、ψq仅与id、iq有关。
np为电机极对数,电磁转矩Te可表示为
Te=1.5np[ψλiq+(Ld-Lq)idiq]
(4)
电流方程为
(5)
PMSM的功率流程图如图2所示。
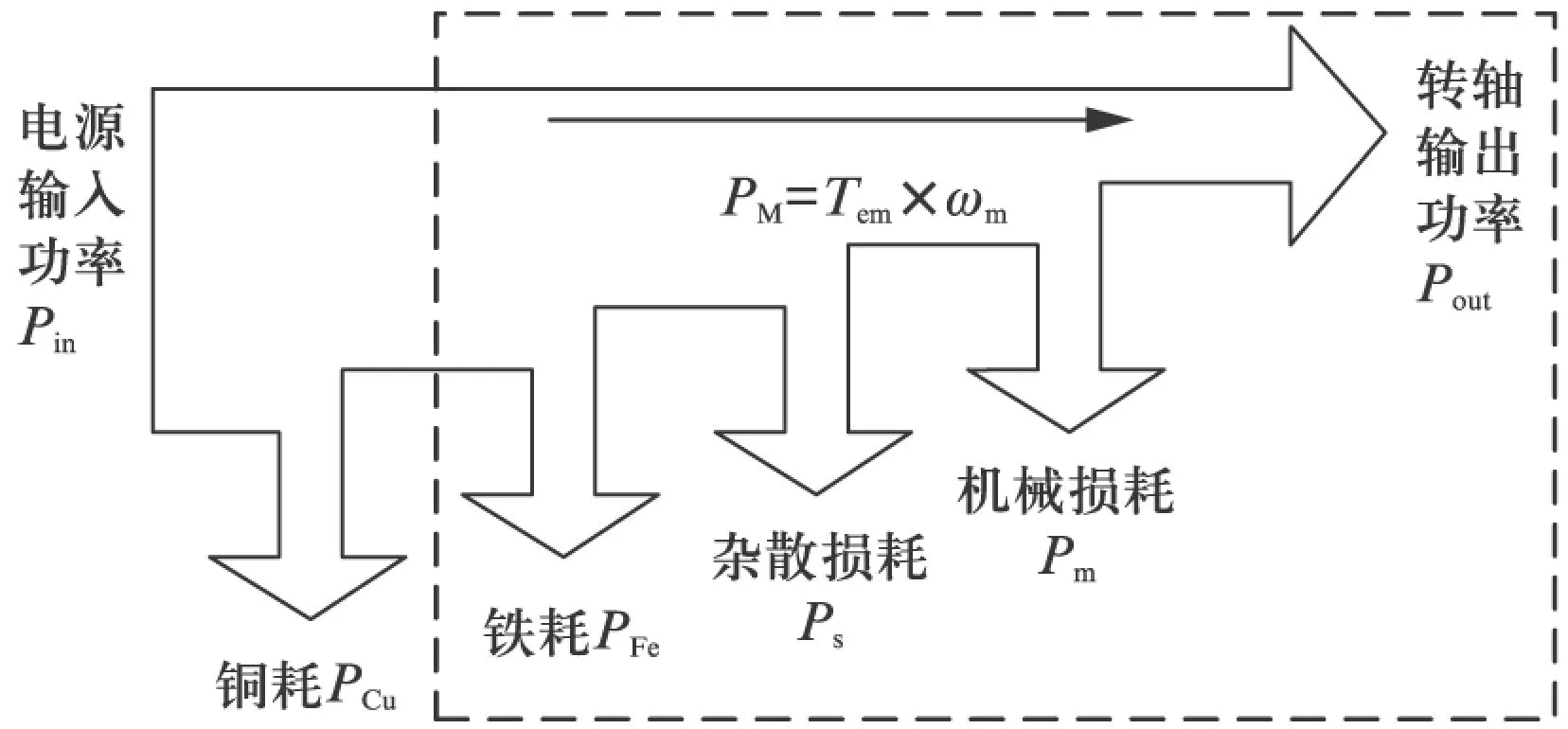
图2 永磁同步电动机的功率流程图
当电机运行在稳态,电机的功率满足
Pin=1.5(udid+uqiq)=
(6)
式(6)中右边第一项为铜耗PCu,第二项为电磁功率PM(功率流程图中虚线框包围的部分,包含了铁耗PFe、杂散损耗Ps、机械损耗Pm、轴上输出功率Pout),即:
PM=PFe+Ps+Pm+Pout
(7)
(8)
Tm=Frωm
(9)
式中:Tout——轴上输出转矩;
ωm——机械角速度;
Tem——电磁功率;
TFe——铁耗等效转矩;
Ts——杂散损耗等效转矩;
Tm——摩擦转矩;
Fr——摩擦转矩系数。
扣除了铁耗之后的机械转矩Tmec为
Te-TFe=Tmec=1.5np[ψλiqt+Ldidiqt-Lqiqidt]
(10)
(11)
忽略杂散损耗,PMSM的运动方程为
(12)
式中:TL——外部负载;
J——电机的转动惯量。
采用id=0的闭环控制,空载稳定时PFe近似为
(13)
通过式(13)计算得到铁耗等效电阻的阻值。
2FPGA建模
虚拟电机系统建模采用同步时钟与异步复位的设计原则,采用模块化、流水线的设计模式,主要包括UART通信模块、逆变器模块、电机本体模块和输出输入信号接口模块,如图3所示。UART通信模块负责从上位机输入电机的电阻、电感、损耗电阻、直流母线电压等参数;PLL提供全局的50MHz同步时钟信号;RESET提供异步复位信号,与控制器相连,在关断控制器的同时复位虚拟电机,避免反复烧写FPGA;逆变器和电机本体采用高精度的Q格式运算,电机的电感参数和电阻等参数可以通过查RAM表的形式获得。
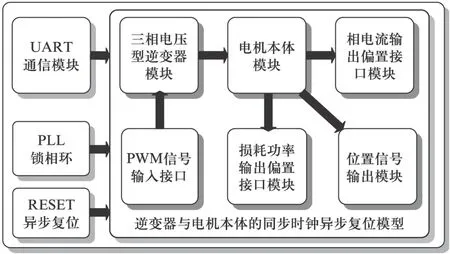
图3 虚拟电机的模块分布图
2.1三相电压型逆变器的FPGA建模
逆变器的FPGA实现如图4所示,首先要根据PWM信号和三相电流的方向得出三相端电压,再减去中点电压就可以得到三相相电压[7-8]。文献[7-8]都没有考虑相电流为0时刻的状态,本文采用同步状态机的方式,判断三相电流的方向,规定电流过0点时刻的电流方向为上一个时刻电流的方向,然后输出方向结果sa、sb、sc。图5为三相电流方向的状态转移图,定义“0”和“1”两个状态,ix代表a、b、c任意一相电流,sx是ix的电流方向判断的结果。如果ix>0,sx=01,如果ix<0,sx=10,如果ix=0,sx保持不变。判断逻辑如表1所示。
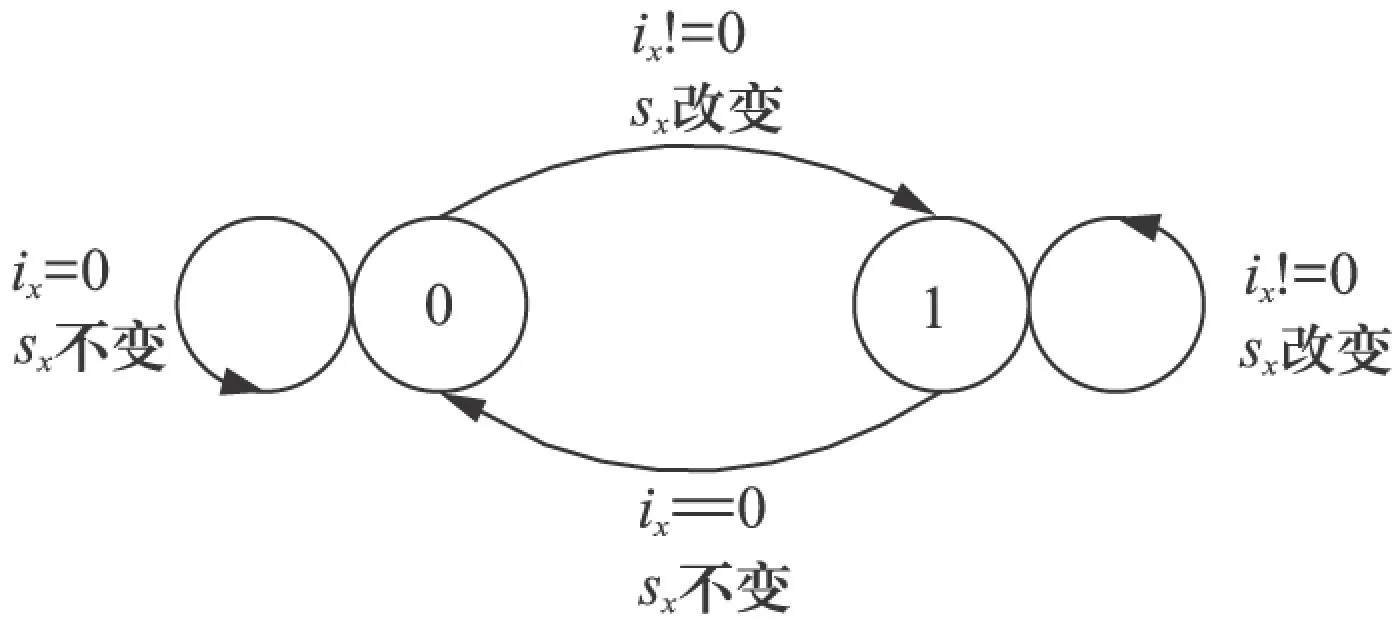
图5 三相电流方向判断状态转移图
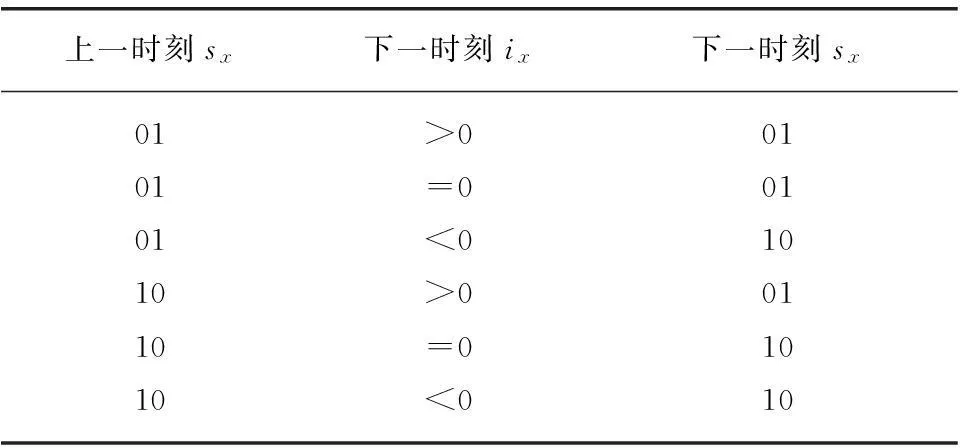
上一时刻sx下一时刻ix下一时刻sx01>00101=00101<01010>00110=01010<010
2.2考虑空载损耗IPMSM模型的FPGA建模
考虑空载损耗的IPMSM总体结构如图6所示。由于考虑了电感饱和和交叉耦合效应,将外部输入的Ld和Lq电感表进行双线性插值计算出任意id和iq对应的电感系数,使得电磁和等效铁耗转矩模型的运算结果更加平滑和精细(见图7),计算流程如图8所示。
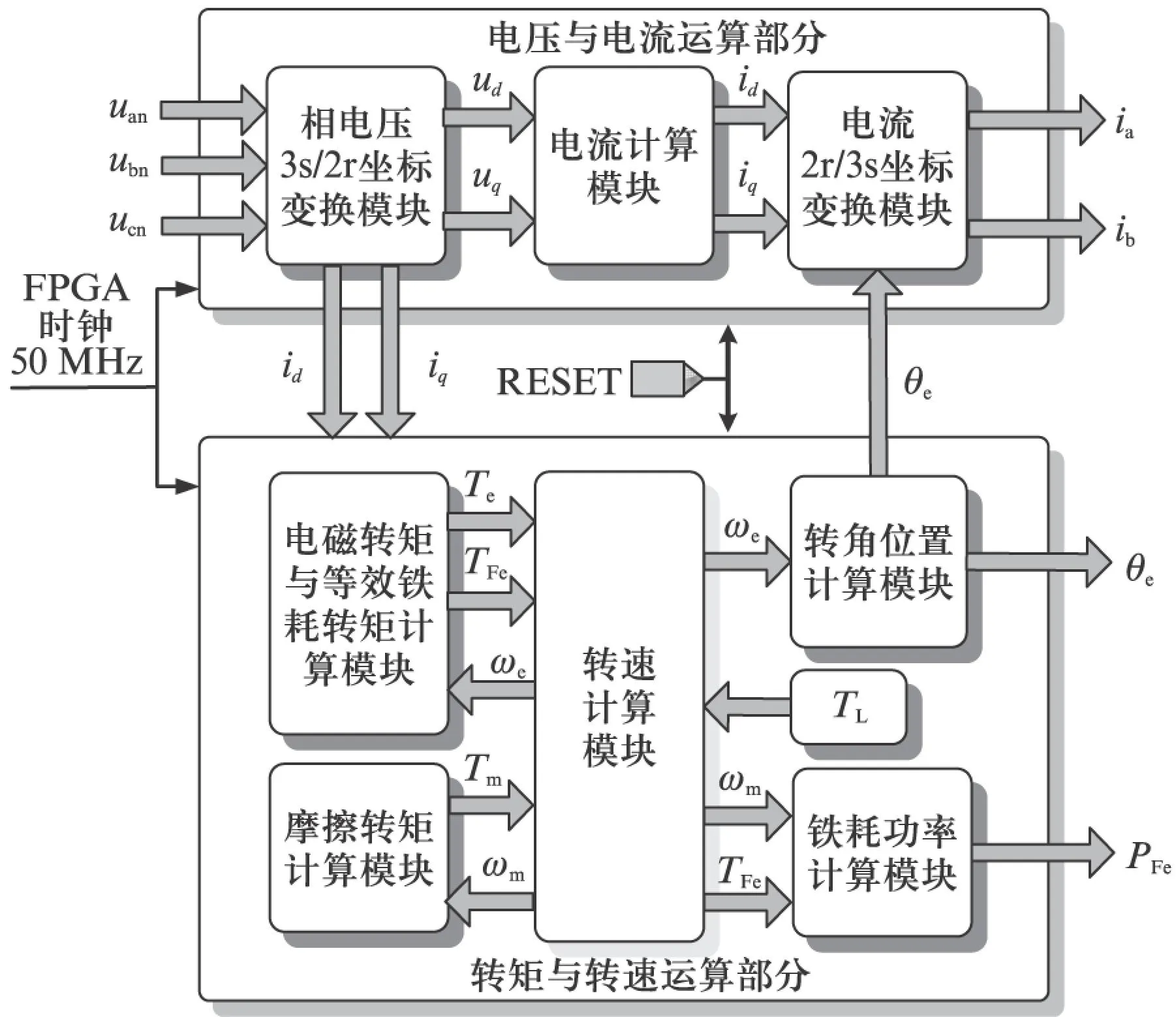
图6 考虑空载损耗的IPMSM建模框图
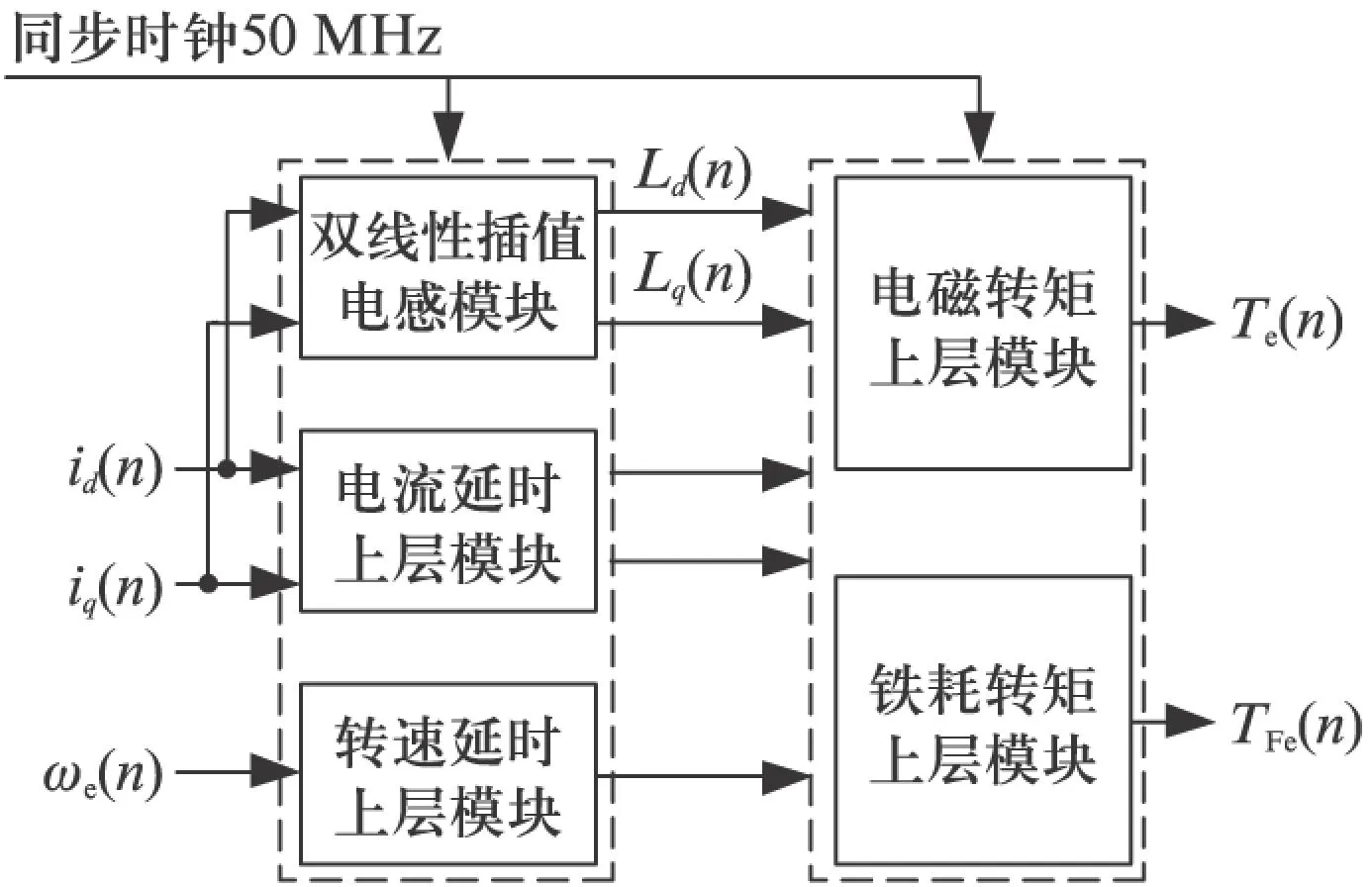
图7 基于双线性插值电感系数的转矩计算
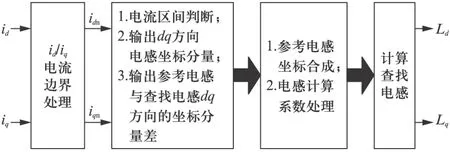
图8 FPGA电感双线性插值计算流程图
计算电机任意时刻的等效铁耗转矩,必须首先得到1/Rc的值,而Rc=f(n),n单位为r/min。考虑到FPGA的乘法器资源有限,而且当转速相差8r时Rc变化不大,Rc可近似为常数,所以可将1/Rc的定标值以转速差为8r的形式存放在RAM中,采用一维查表方式得到1/Rc(见图9)。通过对转速n的绝对值进行右移3位的位操作获取寻址地址,寻址规律如表2所示。
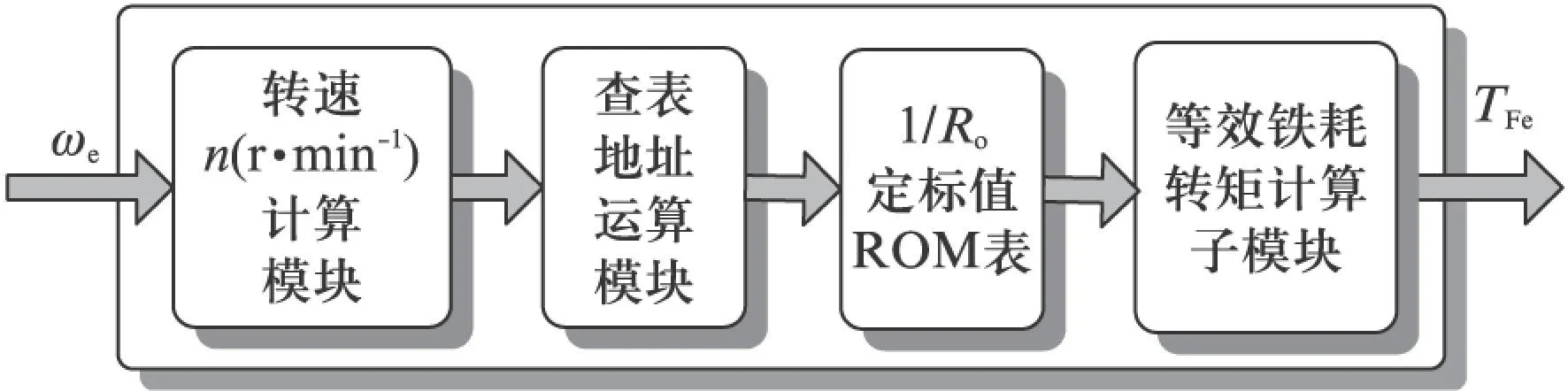
图9 基于一维ROM表的铁耗等效转矩计算模块
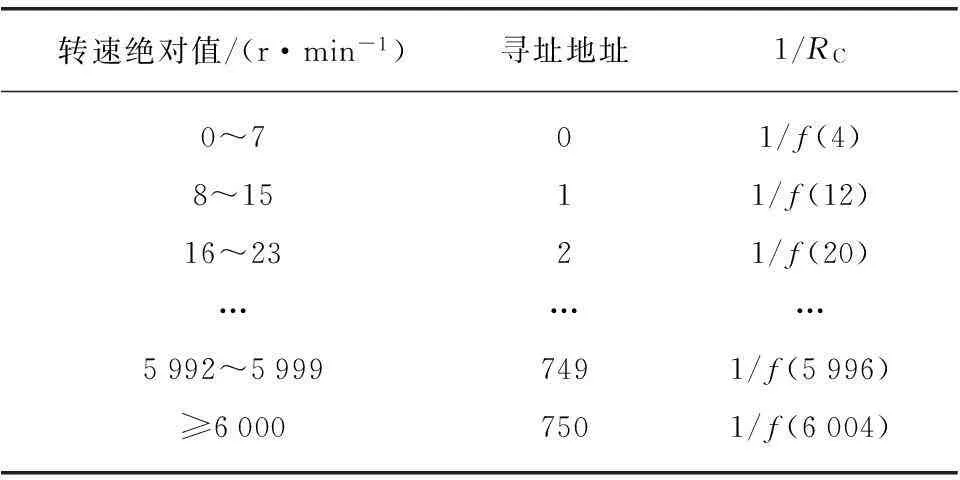
转速绝对值/(r·min-1)寻址地址1/RC0~701/f(4)8~1511/f(12)16~2321/f(20)………5992~59997491/f(5996)≥60007501/f(6004)
2.3仿真步长和时序
目前电机控制器的PWM开关频率可达10~20kHz,为了得到比较高的仿真精度,HIL半实物实时仿真系统的仿真周期要小于控制器周期的1/10。本系统路径延时如图10所示。
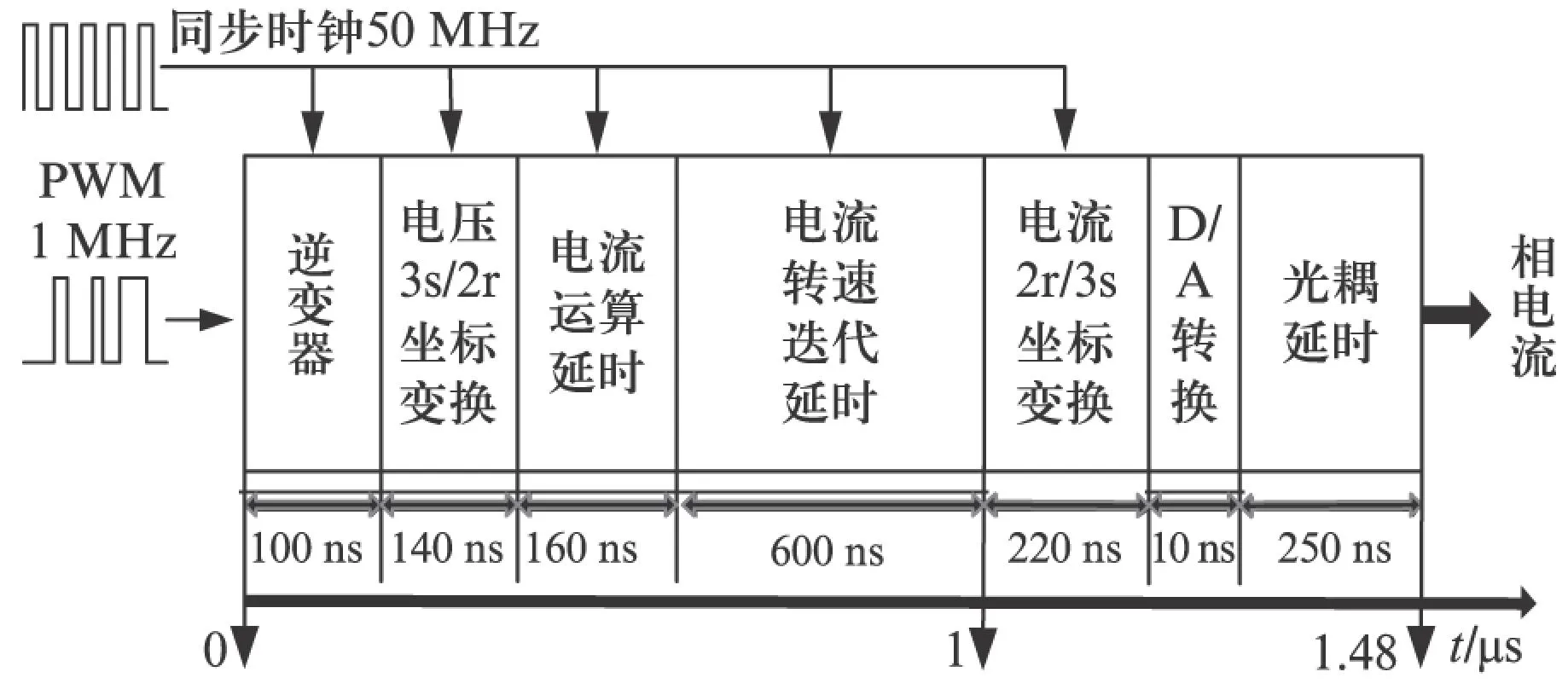
图10 半实物仿真系统时序图
考虑电流坐标变换后FPGA模型计算总延时为1.22μs,0.26μs为D/A转换和光耦延时,从而半实物电机系统从PWM采样到相应的模拟相电流输出所经过的首次延时累计1.48μs。但是完成电流和转速的迭代计算的吞吐延时是1μs,也就是系统的仿真步长为1μs。无论是首次延时和吞吐延时都是微秒级,远远小于PWM的控制周期,能满足系统要求。
3IPMSM半实物实时仿真测试平台
本文采用的HIL半实物实时仿真平台如图11所示。FPGA核心板运行逆变器和IPMSM模型,相电流通过D/A转换成模拟量之后输入到dSPACE控制器的模拟I/O口,位置信号直接输入到dSPACE控制器的数字I/O口。控制器输出的PWM信号驱动逆变器实时模型,输出RESET异步复位信号给整个虚拟电机。通过上位机的Controldesk操作dSPACE控制器,使用dSPACE快速控制原型方法对HIL半实物实时仿真系统的IPMSM进行控制。通过上位机串口通信界面给虚拟电机输入电阻、电感等参数。
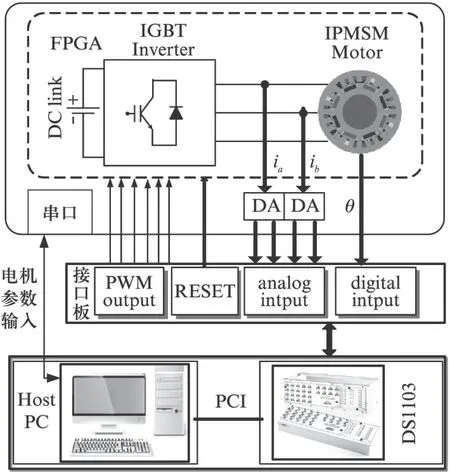
图11 硬件在环半实物仿真平台
4试验
试验选取的车用IPMSM的主要参数如表3所示。
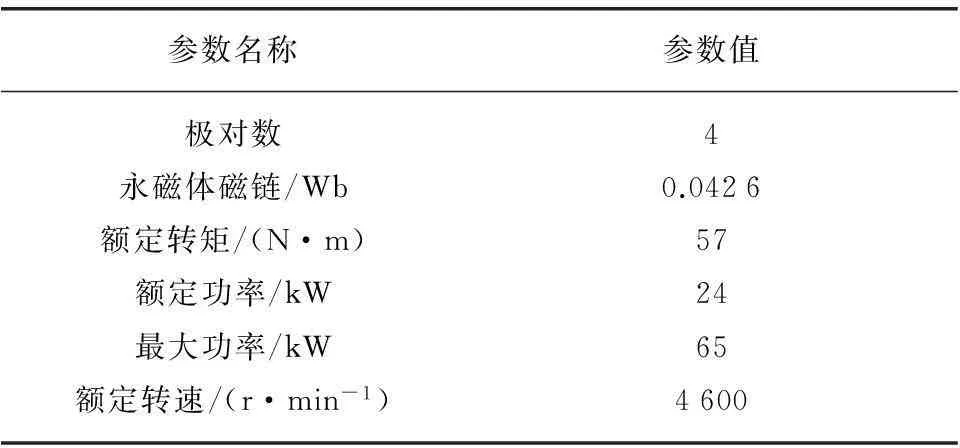
表3 车用IPMSM主要参数
4.1空载试验
空载试验发电机断开,电动机采用id=0的控制策略。轴上功率对应的是发电机的摩擦损耗[见图12(a)],可以获得相应的摩擦转矩系数Fr。由于两台电机的参数相同,电动机的摩擦转矩系数也是Fr。电机从静止加速到6000r/min,电磁功率与轴上输出功率之差就是电机的空载损耗功率,然后通过式(13)可以得到等效铁耗电阻值(见图12(b))。
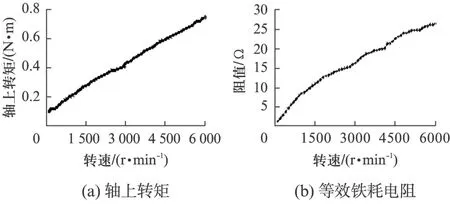
图12 空载试验轴上转矩与等效铁耗电阻波形
4.2虚拟电机和真实电机对比试验
两种平台的试验控制策略都是采用相同的矢量控制策略,采用离线计算的电流指令表,在基速区采用最大转矩电流比控制,基速以上采用弱磁控制。直流母线电压为200V,死区时间为5μs,开关频率12.5kHz,矢量控制框图如图13所示。
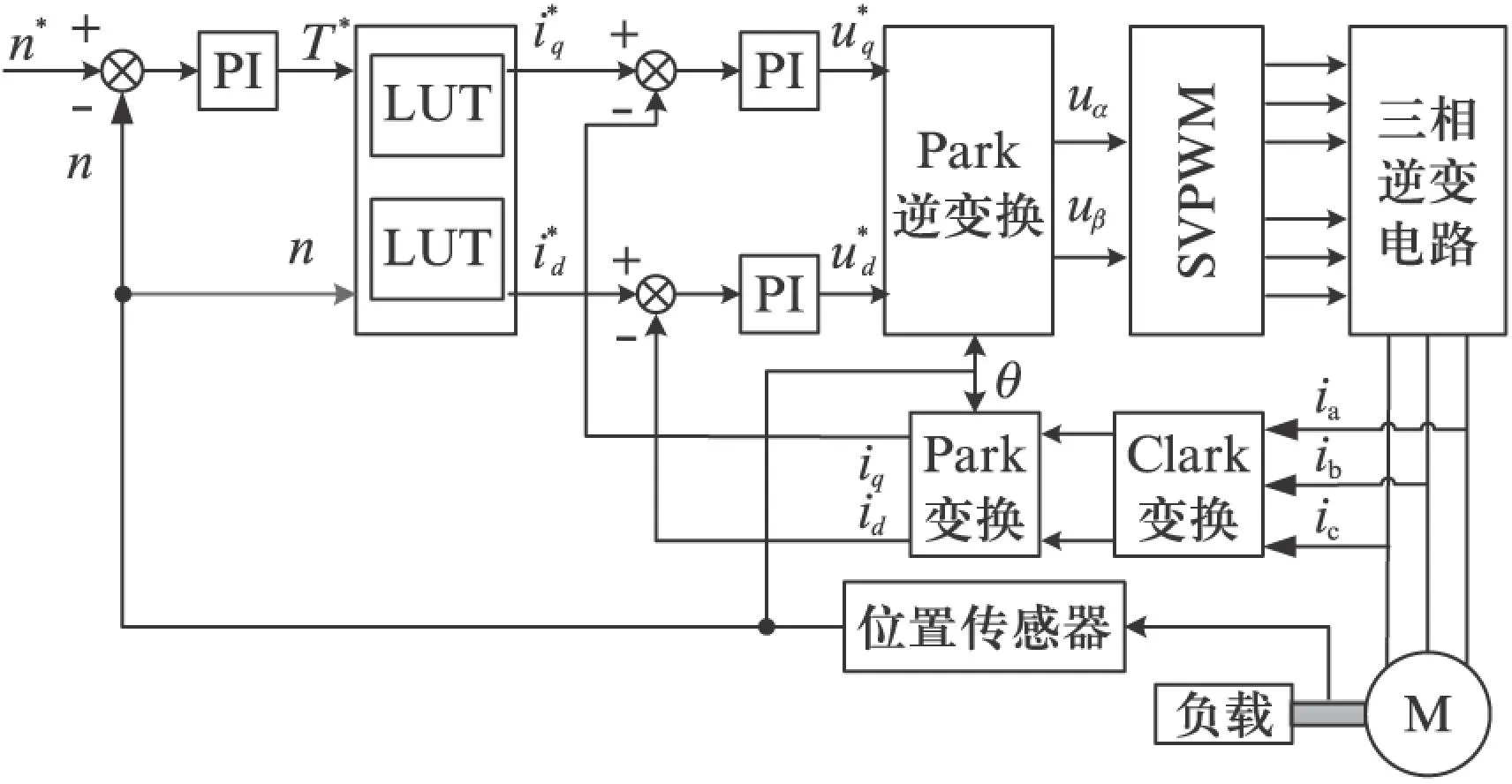
图13 采用电流指令表的电机矢量控制框图
在虚拟电机试验中共采用了两种虚拟电机,一种是没有考虑铁耗的虚拟电机,另一种是考虑铁耗的虚拟电机。试验结果对比如图14所示。
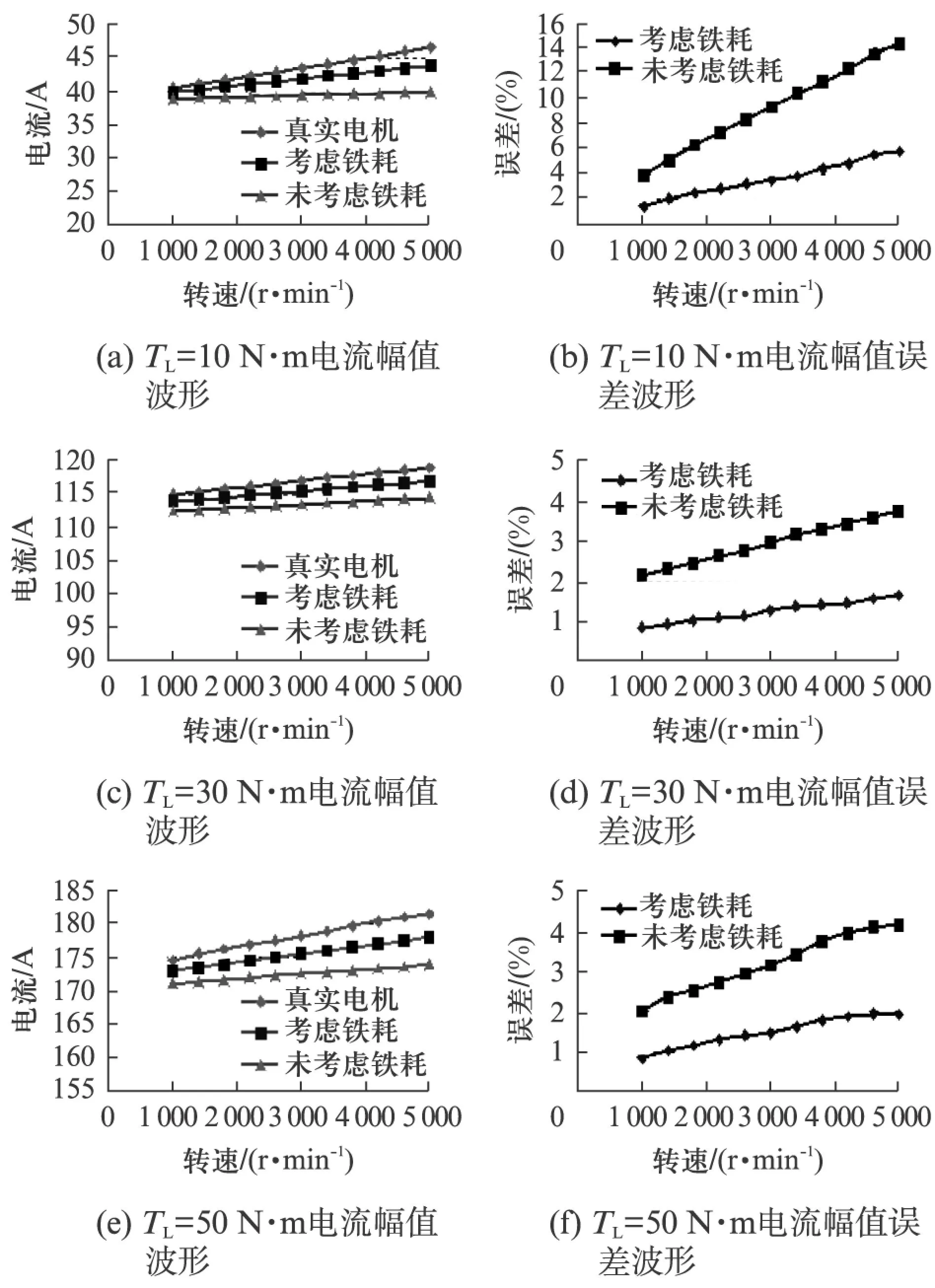
图14 相电流幅值以及相对误差试验波形
分别在负载为10、30、50N·m情况下进行对比试验。低速时,3种电机的相电流的基波幅值比较接近,随着转速的升高,虚拟电机1要明显更加接近于实际电机[见图14(a)、(c)、(e)]。由于摩擦损耗转矩的作用,转速上升,两种虚拟电机的电流都有所上升。考虑铁耗的虚拟电机1由于只考虑了基波所产生的铁耗,所以与真实的电机还是有一定的差距。随着转速增加,两种虚拟电机与真实电机的相电流幅值误差都有所上升,但是考虑铁耗比没有考虑铁耗的虚拟电机精度有了明显提高,轻载误差在2%~6%[见图14(b)],重载误差在1%~2%[见图14(f)]。
5结语
本文在FPGA中搭建了考虑铁耗、机械损耗的数字化虚拟电机。整个系统仿真步长为1μs,具有良好的动态响应性和稳态性。与真实电机进行了多工况的对比验证,对比试验表明: 与理想模型的虚拟电机相比,考虑空载损耗之后,轻载相电流幅值的误差从4%~14%降低至2%~6%,重载相电流幅值的误差从2%~4%降低至1%~2%。半实物仿真测试精度得以提高。
【参考文献】
[1]卢东斌,欧阳明高,谷靖,等.电动汽车永磁同步电机最优制动能量回馈控制[J].中国电机工程学报,2013,33(3): 39-46.
[2]COLBY R S, DONALD W N. Efficient operation of surface-mounted PM synchronous motors[J]. IEEE Transactions on Industry Applications, 1987,23(6): 1048-1054.
[3]SONG K, LIU W G, LUO G Z. Permanent magnet synchronous motor field oriented control and HIL Simulation [C]∥ Vehicle Power and Propulsion Conference, 2008(8): 1-6.
[4]SIMON A, JEAN B, CHRISTIAN D. Real-time simulation of a complete PMSM drive at 10μs time step[C]∥ Power Electronics and Applications, 2005 European Conference on, 2005: 1007-1010.
[5]黄苏融,史奇元,刘畅.基于现场可编程门阵列永磁同步电机模型的硬件在环实时仿真测试技术[J].电机与控制应用,2010,37(9): 32-37.
[6]黄苏融,刘畅,高瑾,等.五相内置式永磁同步电机硬件在环实时仿真平台的实现[J].电机与控制应用,2011,38(10): 20-25.
[7]黄苏融,朱培骏,高瑾,等.基于数字化虚拟电机硬件在环实时仿真测试[J].电机与控制应用,2012,39(7): 20-25.
[8]黄苏融,黄艳,高瑾,等.基于FPGA的虚拟异步电机系统的半实物实时仿真[J].电机与控制应用,2013,40(9): 1-5.

声明
本刊已许可万方数据、重庆维普、中国学术期刊(光盘版)电子杂志社、北京世纪超星信息技术发展有限责任公司在其网站及其系列数据库产品中以数字化方式复制、汇编、发行、信息网络传播本刊全文。该社著作权使用费与本刊相关费用抵消。如作者不同意文章被收录,请在来稿时向本刊声明,本刊将做适当处理。
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年5期)2022-11-17
中学生数理化·中考版(2022年10期)2022-11-10
科技创新导报(2022年17期)2022-09-22
微电机(2022年1期)2022-03-21
山东冶金(2019年1期)2019-03-30
作文小学中年级(2018年10期)2018-10-29
通信电源技术(2018年5期)2018-08-23
电子制作(2018年1期)2018-04-04
湖南农业(2016年3期)2016-06-05