基于模糊PID的汽车液压伺服主动悬架控制系统
2016-01-05 05:24李军伟
山东理工大学学报(自然科学版) 2015年2期
李军伟, 曲 燕
(山东理工大学 交通与车辆工程学院, 山东淄博 255049)
基于模糊PID的汽车液压伺服主动悬架控制系统
李军伟, 曲燕
(山东理工大学 交通与车辆工程学院, 山东淄博 255049)
摘要:在详细分析汽车液压主动悬架中液压伺服系统非线性特性的基础上,建立了1/4汽车悬架非线性系统数学模型.针对具有高度非线性的阀控非对称液压缸系统,设计了模糊PID控制器,使PID控制器的控制参数能随着系统运行状态的变化而自动调整. 对比分析了相同路面输入激励下主动悬架与被动悬架的控制效果.仿真结果表明,与被动悬架相比,主动悬架能有效降低车身加速度和轮胎动载荷,该系统能有效改善汽车的平顺性和安全性.
关键词:液压伺服控制;汽车主动悬架;模糊PID;
汽车悬架是影响车辆行驶平顺性、操纵稳定性的重要部件.从工作机理出发,悬架可分为被动悬架、半主动悬架和主动悬架.与前两种相比较,主动悬架能够根据车辆行驶的工况和载荷等情况产生施加在车身的主动力,控制汽车在路面激励下的车身加速度、悬架动挠度、车轮动载荷等影响汽车性能的关键指标,使车辆的整体行驶性能达到最佳.
液压主动悬架就是在被动悬架系统的基础上加装一个可以产生液压作用力的液压伺服系统.该系统由液压油源、单杆液压缸和液压伺服阀组成.单杆非对称液压缸具有占用工作空间小、结构紧凑等优点,但是由于非对称缸两腔活塞面积的非对称性,使液压缸正向和反向的运动特性呈现非线性,同时系统中多数参数具有不确定性和时变性[1-3],这给传统依赖系统模型的控制方法应用带来了很大的难度.常规PID因其结构简单、鲁棒性好、工作可靠、调整方便而成为广泛应用的控制技术之一.但是由于其控制参数不能自动调整,对于控制非线性时变系统来说,常规PID就显得不甚理想[4].模糊控制是一种基于规则的控制,它基于现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确数学模型,设计简单,便于应用[5-6].本文采用的模糊PID就是把常规PID控制和模糊控制结合起来,根据系统的运行状态,通过模糊算法在线调整PID的控制参数.在建立1/4汽车液压主动悬架动力学模型的基础上,采用模糊PID控制策略对系统进行控制,充分利用模糊PID控制的优点以达到良好的控制效果.
1 系统模型
1.1 悬架模型
汽车是一个复杂的振动系统,需根据侧重点的不同,对实际车辆模型进行简化. 汽车悬架系统主要研究来自不平路面激励引起的汽车振动.在通常情况下,一般都简化成弹簧阻尼器的形式,采用二自由度 1/4 车辆模型,如图1所示.
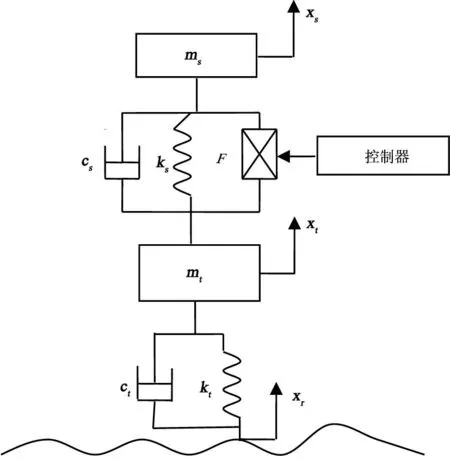
图1 1/4车辆悬架模型
在汽车行驶速度恒定的情况下,根据牛顿第二定律可建立图1所示的1/4车辆悬架模型在其平衡点的动力学方程
(1)

(2)

1.2 伺服阀流量方程
汽车液压主动悬架中的控制力F是由阀控液压缸装置产生的,该装置由电液伺服阀和单杆液压缸组成,如图2所示.伺服阀的供油压力和回油压力分别用Ps和Pr表示,假定系统回油压力为零,xv表示伺服阀阀芯的位移,P1和P2分别表示液压缸上腔和下腔的压力,Q1和Q2分别表示液压缸上、下两腔的流量.

图2 阀控液压伺服系统
图2中各物理量的方向以箭头所示方向为正.伺服阀的流量方程为
(3)

(4)

(5)
(6)
式中:Cd为节流窗口的流量系数;w为伺服阀节流窗口的面积梯度;xv为阀芯位移;ρ为油液密度.
1.3 伺服阀输入方程
伺服阀输入方程所描述的是输入给伺服阀控制线圈的电流iv与阀芯位移xv的关系.在一般情况下,该方程可简化为一阶惯性环节,即
(7)
式中,τ为时间常数.
1.4 液压油缸流量连续性方程
在考虑到液压油缸的泄漏流量和油液的体积压缩流量后,液压油缸上、下两腔的流量连续性方程分别为

(8)

(9)
V1=V10+A1(xs-xt)
(10)
V2=V20-A2(xs-xt)
(11)
式中:Cic为液压油缸的内部泄漏系数;V1、V2分别为液压油缸上、下腔的容积;V10、V20分别为液压油缸上、下腔的初始容积;A1为液压油缸上腔活塞的有效面积;A2为液压油缸下腔活塞的有效面积;βe为液压油等效体积弹性模数.
液压油缸的驱动力为
F=A1p1-A2p2
(12)
式(1)~(12)构成了汽车液压主动悬架系统的数学模型.从上述方程可以看出,该电液伺服系统为一非线性系统,由于系统温度的变化,将导致油液密度ρ的变化,同时将影响Cd和Cv的数值.因此该系统是一个非线性的时变系统,采用一般的线性控制方法难以胜任.
2 模糊自整定PID控制器设计
模糊自整定PID控制器结构如图3所示,给定量与反馈量的差值e及差值的变化率ec为模糊控制器的输入量,将它们模糊化后得到模糊量E及EC,根据控制规则由模糊推理和解模糊后可得到3个修正参数ΔKp、ΔKi、ΔKd,3个修正参数可根据系统的不同运行状态自动调整,从而实现PID控制参数的自适应调整.模糊自适应整定PID控制系统为双输入三输出的系统,本文选取期望车身位移和实际车身位移的偏差e及其变化率ec作为输入变量,输出变量分别为ΔKp、ΔKi、ΔKd.
模糊PID控制器的控制参数为
Kp=Kp0+ΔKp
(13)
Ki=Ki0+ΔKi
(14)
Kd=Kd0+ΔKd
(15)
式中:Kp、Ki和Kd为模糊PID控制器的控制参数;Kp0、Ki0和Kd0为PID控制器整定后的参数.
偏差量e和其变化量ec的隶属函数如图4所示.ΔKp、ΔKi、ΔKd的隶属度函数如图5所示. 具体的模糊推理规则见表1.
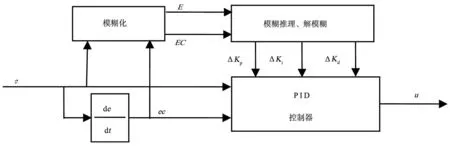
图3 转速环模糊PID控制器结构

图4 e和ec的隶属函数

图5 ΔKp、ΔKi、ΔKd的隶属函数
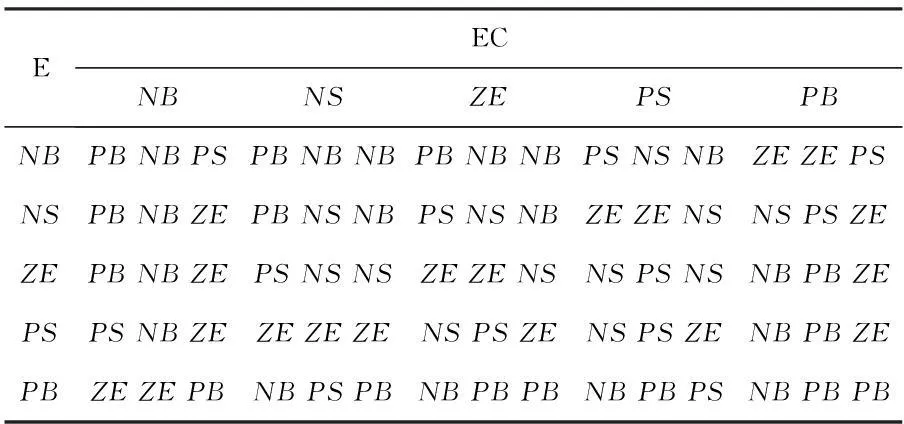
EECNBNSZEPSPBNBPBNBPSPBNBNBPBNBNBPSNSNBZEZEPSNSPBNBZEPBNSNBPSNSNBZEZENSNSPSZEZEPBNBZEPSNSNSZEZENSNSPSNSNBPBZEPSPSNBZEZEZEZENSPSZENSPSZENBPBZEPBZEZEPBNBPSPBNBPBPBNBPBPSNBPBPB
模糊推理方法选用最常用且比较简单的Mamdani型推理方法,推理完成后,采用重心法解模糊,求取ΔKp、ΔKi、ΔKd的精确值,并与PID控制器的Kp、Ki、Kd一起调节系统[7].
3 系统仿真分析
本文采用某车型的参数进行仿真,其主要参数见表2.

表2 仿真参数
路面输入如图6所示.在该路面输入激励下,仿真得到被动悬架与主动悬架的车身垂直加速度、悬架变形和轮胎动载荷曲线如图7~图9所示.
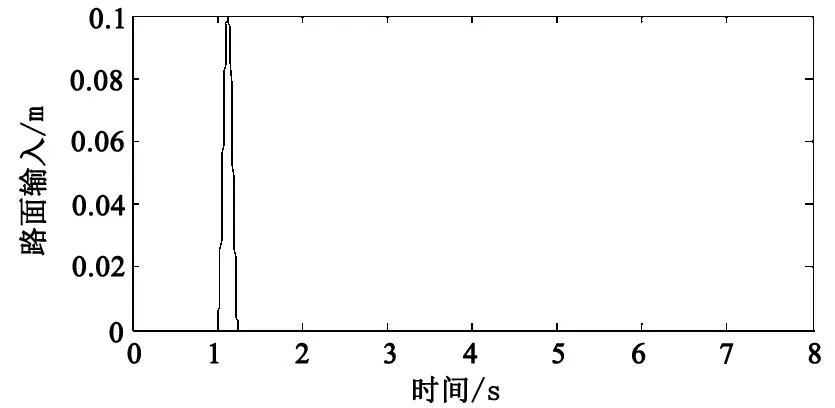
图6 路面输入曲线

图7 车身加速度曲线
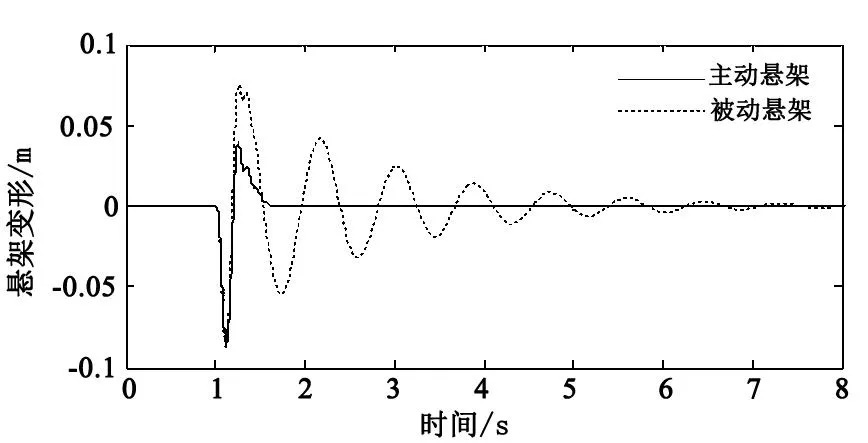
图8 悬架变形曲线

图9 轮胎动载荷曲线
从仿真结果可以看出,被动悬架车身加速度大约在-5.3~6m/s2之间变化,同时加速度有较大幅度的波动,这不利于汽车的行驶平顺性.主动悬架车身加速度大约在-4.5~4.2 m/s2之间变化,加速度能快速向0值收敛.与被动悬架相比,主动悬架降低了车身加速度,减小了车辆的垂向振动,有利于汽车行驶的平顺性.
被动悬架动挠度大约在-0.088~0.075 m之间变化,而且悬架动挠度有较大幅度的波动,这不利于汽车的行驶平顺性;主动悬架的动挠度大约在-0.085~0.039 m之间变化,同时能快速收敛于0.虽然主动悬架动挠度与被动悬架挠度相比没有明显减小,但其波动程度明显减小,有利于汽车的行驶平顺性.
被动悬架轮胎动载荷大约在-1 915 ~1 600N之间变化,而且轮胎动载荷有较大幅度的波动;主动悬架轮胎动载荷大约在-1 750 ~1 300N之间变化,同时轮胎动载荷的值能向0快速趋近,其波动程度明显减小,这有利于汽车的操纵稳定性.
4结束语
本文在建立1/4汽车悬架数学模型的基础上,详细分析并建立了汽车液压主动悬架中的阀控非对称液压缸的非线性模型.针对这种具有高度非线性的系统,采用模糊PID的控制策略提高系统的控制性能.仿真结果表明,与被动悬架相比,主动悬架的车身加速度由原来的-5.3~6m/s2减小到-4.5~4.2 m/s2、轮胎动载荷由原来的-1 915 ~1 600N减小到-1 750~1 300N,同时悬架动挠度也由原来的-0.088~0.075m减小到-0.085~0.039m,该系统能有效地改善汽车的平顺性和安全性.
参考文献 :
[1] 李洪人,王栋梁,李春萍.非对称液压缸电液伺服系统的静态特性分析[J].机械工程学报, 2003,39(2):18-22.
[2] Raade J W, Kazerooni H. Analysis and design of a novel hydraulic power source for mobile robots[J]. IEEE Transactions on Automation Science and Engineering, 2005,2(3):226-232.
[3] 白寒,王庆九,徐振,等. 阀控非对称缸系统多级滑模鲁棒自适应控制[J].农业机械学报,2009,40(10):193-198.
[4] 王东,陆森林,陈士安,等. 优化PID与神经PID控制主动悬架的性能对比研究[J].机械设计与制造,2011, (10):96-98.
[5] 刘云峰,缪栋.电液伺服系统的自适应模糊滑模控制研究[J].中国电机工程学报,2006,26(14):140-144.
[6] Mohammad M F, Seyed S A. Impedance control of an active suspension system[J]. Mechatronics, 2009 (19): 134-140 .
[7] 刘金琨. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社,2005.
(编辑:郝秀清)
收稿日期:2014-09-09
作者简介:李军伟,男, ljwhitt@163.com
文章编号:1672-6197(2015)02-0005-04
中图分类号:U270.1
文献标志码:A
Controlsystemofvehiclehydraulicservo
activesuspensionsbasedonfuzzyPID
LIJun-wei,QUYan
(SchoolofTransportationandVehicleEngineering,ShandongUniversityofTechnology,Zibo255049,China)
Abstract:The quarter-car active suspensionnonlinearmodel isbuild, based on the analyses of the hydraulic servo control system involving the nonlinear characteristics used in vehicle active suspension. According to the high nonlinear characteristics of asymmetrical cylindercontrolled by symmetricalvalve, the fuzzy PID controlleris designed and the controller's parameters can be regulated with the running states of the control system. For the same road input, the controlled effect is compared between active and passive suspension. The simulation results show that the body vertical acceleration and wheel dynamic load are improved in active suspension compared with passive suspension.The ride performance and handling stability can be improvedby the control system.
Key words:hydraulic servo control;vehicle active suspension;fuzzy PIDcontrol