仿海蟹机器人游泳足水动力学分析与实验研究
2015-12-27 05:45:05王海龙王刚陈曦王立权靳励行
西安交通大学学报 2015年8期
王海龙,王刚,陈曦,王立权,靳励行
(1.哈尔滨工程大学机电工程学院,150001,哈尔滨;2.哈尔滨工程大学水下机器人技术国防重点实验室,150001,哈尔滨; 3.黑龙江工程学院机电工程学院,150001,哈尔滨)
仿海蟹机器人游泳足水动力学分析与实验研究
王海龙1,王刚2,陈曦3,王立权1,靳励行1
(1.哈尔滨工程大学机电工程学院,150001,哈尔滨;2.哈尔滨工程大学水下机器人技术国防重点实验室,150001,哈尔滨; 3.黑龙江工程学院机电工程学院,150001,哈尔滨)
以生物梭子蟹为仿生原型,提出一种足桨耦合驱动仿海蟹机器人。该机器人采用三对步行足和一对游泳足的结构形式,基于爬行推进与拍动翼复合推进的方式,兼具形态仿生和功能仿生的特点,可实现水下行走与水中浮游的双重功能。通过对游泳足推进方式进行数值模拟和实验研究,结果表明:升力模式推进在水翼上挥和下拍过程中均产生正推力,推进效率相对较高;随着拍动幅度的增加,平均推力和推进效率都明显降低;推进效率与拍动频率呈抛物线关系;当斯特劳哈尔数Sr在0.4~0.6范围内时,升力模式的推进效率最大,当Sr在0.8~1.0范围内时,阻力模式的推进效率最高,两者所对应的尾涡脱泻均呈反卡门涡街形式;游泳足水翼的厚度对水动力性能也有影响,相对薄的水翼不仅能增加平均推力,还能降低系统的总能耗,因此更适合推进。
仿海蟹机器人;游泳足;水动力性能;游动模式
近年来,由于海洋开发和军事领域需求的增加,人类研制出了多种无人水下航行器,尽管它们的操纵方式和用处不同,但其推进系统通常由多个螺旋桨组成,这样的系统通常具有较大的体积和质量,往往会消耗更多的能量[1]。另一方面,许多水下生物具有高效率、灵活的游动能力和准确的定位能力,因此可将仿生推进应用到无人水下航行器上[2]。目前,已研制出的仿生水下航行器按照其所模仿水下生物推进方式不同可分为仿鱼鳍摆动推进、仿乌贼喷射推进、仿多足动物爬行推进、仿蠕虫蠕动推进和仿海龟水翼法推进等[3-7]。
三疣梭子蟹是一种具有优越水下推进能力的浅滩螃蟹,主要栖息于近海沿岸水深7~100 m的淤泥、砂泥底的石头下或水草中,它们通常利用桨形游泳足在水中游动,用前3对步足的指节在水底缓慢爬行。该生物兼具了海底爬行和水中浮游双重推进方式,具有良好的海浪、海流适应能力,特别适合在复杂水底地貌、浅滩、强对流等区域活动[8-10]。本研究拟以梭子蟹作为仿生原型,将爬行推进技术与拍动翼技术相融合,设计具有足桨耦合驱动仿海蟹机器人,使机器人具备海底爬行和水中浮游双重特性,能够根据浅滩地貌环境和作业任务需求自主选择运动方式。将这种推进方式应用于无人水下航行器中,为丰富无人航行器推进方式,提供一种新思路和选择。目前,关于类似螃蟹和水生昆虫这种甲壳类二级水生动物利用游泳足水下推进的研究还比较少。但使用鱼类的胸鳍(MPF)和海龟的翼状前肢实现水下推进的技术得到了广泛的研究,其水动力学性能、数值计算、运动机理均可应用在仿海蟹机器人水下推进理论研究中。
海蟹的游泳足与步行足结构类似,都包含6个骨节,多关节的结构决定了其运动方式的多样性,而且每种游动模式下表现出的水动力学特性也不相同,因此需要对游泳足在不同种运动模式下的水动力性能进行详细研究,才能获得最佳的运动参数。文献[11]将多运动模式的鱼类胸鳍摆动分成类似昆虫翅膀上下扑动的升力模式和前后挥拍的阻力模式。文献[12-13]对三自由度刚性胸鳍2种运动模式进行数值模拟,结果显示:融入上下拍翼的升力运动模式推进效率可达40%,远大于阻力运动模式,在敞水情况下基于升力推进能够产生更大的推力,而静水中基于阻力推进模式能够产生更大的推进力。文献[14]通过对硬骨鱼类咽颌运动模式进行活体运动形态的定性观测,发现鱼类在低速游动时采用阻力模式,而在高速巡游时采用升力模式。文献[15]基于二维叶素理论分析了三刺鱼游动时胸鳍受到的推进力和游动效率,发现基于阻力推进模式胸鳍在动力行程产生的推力峰值较大,可增强机器人的机动性,但该模式的推进效率范围约为0.1~0.3,远低于基于升力推进模式。
由于海蟹游泳足的结构和运动都是非常复杂的,不同操纵方式和运动条件,游泳足都会表现出不同的运动形态和特征,为此本文对生物梭子蟹游泳足生理结构和运动特征进行了分析,建立了刚性游泳足多关节运动模型,然后采用数值计算和低速水洞实验方法对游泳足推进运动过程中的水动力性能进行研究,分析不同游动模式及运动参数对游泳足的水动力性能的影响。
1 仿海蟹机器人游泳足模型
1.1 游泳足生理结构
螃蟹是节肢动物门甲壳纲十足短尾亚目动物,具有两栖活动能力,可分为淡水蟹和海水蟹[8]。淡水蟹通常不能游泳,而海水蟹中能够游泳的品种也不多,梭子蟹是这类品种中的一种。它的躯体由头胸部和腹部两部分组成,如图1所示。头胸部短而扁,被一层甲壳保护,这种盾状的甲壳,生物学称为背甲。躯体两边有五对附属肢连接,统称为胸足。第一对端部呈钳状,称螯足,主要用来捕食和御敌。后面的4对胸足称为步足,对于梭子蟹来说,最后一对步行足进化为扁平的游泳桨的形式,又称为桨形游泳足。它们常用前3对步行足的指尖在海底缓慢爬行,用游泳足指节水翼拍水游动,或向侧前方前进,或向侧后方倒退,该生物兼具了海底爬行和水中浮游双重推进方式。

图1 三疣梭子蟹外形
通过活体实验发现,三疣梭子蟹游泳足生理构成与步足基本相同,主要区别是其前节和指节变宽变薄,呈现划动桨的形式。游泳足能够在水下灵活自如的拍动,取决于其多关节的骨骼结构。单个游泳足由6个骨节组成,从根部到末端依次为基节、座节、长节、腕节、前节和指节[16]。其中,基节与胸腔连接构成了TC关节,基节与座节连接构成了CB关节,座节与长节连接构成了BM关节,长节与腕节连接构成了MC关节,腕节与前节相连构成了CP关节,前节与指节相连构成了PD关节,共有6个运动自由度,而游泳足的运动是靠内部10组肌肉群牵张进行控制。其中胸腔内包含4组肌肉群,分别为前动肌群、后动肌群、提肌群和降肌群。前动肌群是产生上抬的伸肌,位于胸腔的腹侧,后动肌群是产生下挥动作的屈肌,位于胸腔的背侧,一对肌群协同作用使基节绕TC关节上下摆动。提肌和降肌用来控制座节绕CB关节前后转动。长节内的伸肌群和屈肌群主要控制腕节绕MC关节的左右摆动。CP关节的前后拍动是由腕节内的拉伸肌和弯折肌协同作用产生。前节内的开肌和闭肌控制PD关节的转动,实现指节的上下拍动。游泳足的基节和座节较步行足发达,体积更大,其内的开肌群生理横断面较大,肌纤维数量多且粗壮(如图2所示),主要是由于游泳足在拍水过程中,通常使指节处于展开状态,以此获得更大的推力[17]。

图2 梭子蟹游泳足前节肌肉组织
1.2 足桨耦合仿海蟹机器人建模
在对生物梭子蟹两栖环境足桨复合推进机理研究的基础上,兼具形态仿生和功能仿生特点,将爬行推进技术(采用前3对步足推进)与拍动翼技术(采用游泳足拍水推进)结合,设计了具有浅滩作业能力的足桨混合驱动仿海蟹机器人,如图3所示。
该机器人包括3对步行足、1对游泳足、嵌入式控制系统、感知系统、无线遥控系统和能源系统等。机器人各关节采用防水舵机驱动,控制系统和能源系统被包裹到密封舱内,密封舱外侧安装了水密接头,驱动器通过水密电缆与舱内控制系统进行数据交互。梭子蟹在游泳过程中,主要利用桨形结构的指节和掌节与水作用产生推力,基节和座节位于游泳足的根部,是游泳足的主要驱动关节,不能忽略,而座节与长节连接构成的转动关节及腕节与前节相连的转动关节摆动范围小,在游泳足运动中不起决定作用,因此在结构设计中省略。所设计的游泳足各骨节尺寸及关节运动范围:基节长度为60 mm,TC关节摇翼转角范围-90°≤φTC≤90°;座节长度为30 mm,CB关节前后拍翼转角范围-45°≤φCB≤90°;掌节长度为120 mm,BP关节(将BM、MC、CP 3个关节简化为单个BP关节)上下拍翼转角范围-90°≤φBP≤45°;指节长度为70 mm,PD关节划动翼转角范围-30°≤φPD≤30°。

图3 仿海蟹机器人三维模型
1.3 游泳足运动轨迹
采用多个振动耦合后的谐振摆动方式建立游泳足的运动模型,定义游泳足摇翼运动、前后拍水运动、上下拍水运动和划动翼运动均按照简谐摆动规律运动。游泳足TC关节、CB关节、BP关节运动角位移表达式如下
(1)式中:φTCC、φCBC、φBPC分别为TC关节、CB关节和BP关节运动的角平均值;φTCA、φCBA、φBPA分别为TC关节、CB关节和BP关节运动的幅值;ΔφBP、ΔφCP分别为TC关节运动与CB关节运动和BP关节运动的相位差。
2 数值模拟
(2)
式中:u为速度矢量;φ为通用因变量;ρ为液体密度;Sφ为广义源项;Γφ为广义扩散系数[12]。
湍流模型选择RNGk-ε模型。在这个湍流模型中,把小尺度运动的影响表示在大尺度运动和修正后的黏度项中,从而使其从控制方程中消除。此模型相关参数详见文献[18],k及ε运输方程为
(3)
(4)
2.2 水动力参数
推进力和推进效率是定量分析游泳足水动力学性能的两个重要参数,因此有必要推导这两个参数的计算公式。在游泳足拍动过程中,i轴(i分别代表x、y和z轴)方向上的水动力系数为
(5)
式中:Fi为游泳足拍动过程中在i轴方向上产生的水动力;S为迎流面积;U为来流速度[12]。
为了获得游泳足的推进效率,应计算系统的输入功率。输入功率是指游泳足水翼在拍水过程中因克服水阻力所消耗的功率。根据能量守恒定律,游泳足转动所消耗的功率通过水对其做负功而被水吸收
(6)
式中:Mx、My、Mz为游泳足拍动过程中所产生的在机体坐标系的力矩矢量;ωx、ωy、ωz为游泳足3个基本运动元素摇翼、上下拍翼、前后拍翼耦合运动导致水翼运动的角速度,其计算公式为
(7)
式中:α为游泳足TC关节轴线与机体纵轴线之间所夹的锐角。
影响游泳足水动力性能的斯特劳哈尔数Sr[2]表示为

(8)
式中:b为游泳足拍动过程中脱泻尾涡的宽度,近似为游泳足水翼拍动的幅度。
3 游泳足水动力实验平台
为了验证游泳足水动力数值计算模型的有效性,为进一步分析其水动力性能做准备,搭建了游泳足水动力实验平台,如图4所示。该实验平台由驱动系统、控制系统和水动力测量系统3部分组成,其中驱动系统由4个HS-5646WP数字防水舵机驱动游泳足各关节运动。测量系统采用6维力传感器,分别测量x、y、z3个轴方向的力和力矩,所采集到的力数据通过CAN总线传送到dSPACE半物理仿

(a)低速水洞测量系统

(b)游泳足水动力测量装置局部放大图图4 低速水洞实验平台
真平台中进行后处理。由嵌入式PC104与舵机控制板组成游泳足的运动控制系统,直流伺服电机驱动拉绳拖动整个实验平台沿直线导轨匀速滑动,来模拟水流流动,移动速度可通过控制器调节,范围为0.05~1.0m/s。游泳足水翼采用ABS材料通过3D打印技术制成。
4 仿真与实验结果分析
4.1 摆动游泳足瞬时推力、升力
通过对基于阻力和升力两种模式推进的一系列实验结果进行对比发现,在同种推进模式下,游泳足采用不同控制参数拍动的瞬时推力、升力曲线表现出相似的变化规律,而不同推进模式间的瞬时推力、升力曲线差异较大。在拍动频率f=1Hz、拍动幅度φBPA=30°、来流速度U=0.1m/s的条件下,测得的两种推进模式水动力实验数据与Fluent数值仿真结果所图5所示。
通过分析瞬时推力、升力曲线,得到以下结论。
(1)瞬时推力、升力系数实验数据与数值仿真结果总体变化趋势一致,且数值较为接近,因此采用文中数值计算方法能够很好地模拟游泳足的水动力性能。实验和仿真得到基于升力模式的平均推力分别约为1.036N和0.892N,完全可以提供仿海蟹机器人前游的动力。
(2)游泳足拍动产生的瞬时推力、升力曲线均按简谐规律变化,当游泳足摆动至行程中间位置附近时,瞬时推力、升力都达到峰值,与前人进行的机械胸鳍推进水动力性能实验结果一致[19]。
(3)基于升力模式推进的每个拍动周期存在两个正的推力峰值,即游泳足在上拍和下挥过程中均产生了正推力,说明该种推进模式尾涡的周期性脱落的影响占了主导地位。水翼在半个拍动周期内由于有了2次运动方向的改变,使得尾涡经历了一次完整的脱落,水翼表面首缘出现负压力,水动力幅度达到最大,因此基于升力模式推进能够获得较高的游动效率。
(4)基于阻力模式推进的每个拍动周期仅存在一个正的推力峰值,且幅值大于升力模式,说明该种推进模式的推进力主要是由游泳足后摆运动产生,且后拍过程中水翼相对于水流速度和迎流角度都很大,从而使水动力大幅度增加,但该种推进模式游泳足只在后摆周期对机器人做有效功,因此其游动效率相对较低。

(a)升力模式推力系数曲线

(b)升力模式升力系数曲线

(c)阻力模式推力系数曲线

(d)阻力模式升力系数曲线图5 游泳足瞬时推力、升力变化曲线

(a)升力模式平均推力曲线

(b)升力模式平均升力曲线
(c)阻力模式平均推力曲线

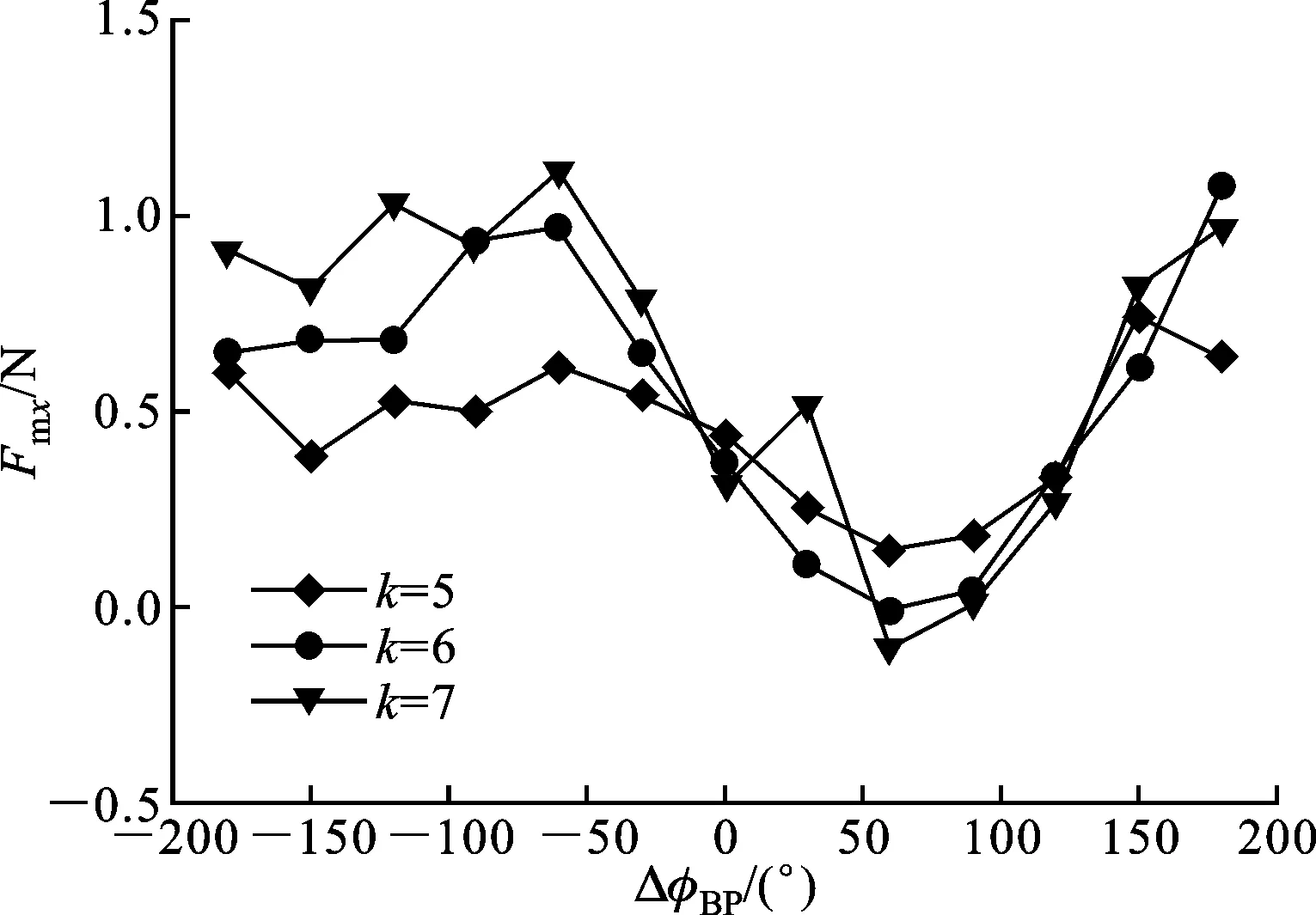
(d)阻力模式平均升力曲线图6 相对相位φBP对游泳足水动力影响放大
4.2 相对相位对游泳足水动力影响
图6所示为当φBPA=30°、U=0.1 m/s、φTCA=30°时得到的ΔφBP对平均推力Fmx和平均升力Fmz的影响。为了便于对比分析,进行了3组不同拍动频率实验,3组无因次频率k分别为5、6、7。由图6可见,在不同拍动频率下,平均推力和升力随着ΔφBP的变化都呈现一定规律性,且变化趋势一致,每种推进模式都存在最佳的ΔφBP,使平均推力、升力达到最大。分析图6a可知,游泳足采用升力模式推进,当拍动频率f固定,随着ΔφBP的增加,平均推力Fmx逐渐增大,在ΔφBP为90°~120°时Fmx达到峰值,约为1.54 N,之后又逐渐降低。对比3组不同频率的推力曲线可知,随着拍动频率的增加,满足Fmx≥0的相位差ΔφBP的范围逐渐扩大,且推进效果也得到增强。分析图6c可知,采用阻力模式推进,随着ΔφBP的增加,Fmx先增大到峰值后减小,当ΔφBP达到-90°~-60°之间某一值时,Fmx达到峰值约为1.12 N。为了获得最佳推进效果,接下来的仿真实验中升力模式ΔφBP取90°,阻力模式ΔφBP取-90°。
4.3 摆动幅度和Sr对水动力性能的影响
图7分别是两种推进模式的推进效率η和平均推力系数Cmx随Sr的变化曲线,其中φBPA为10°、20°、30°,f=1 Hz,φTCA=30°。

(a)升力模式

(b)阻力模式图7 推进力和推进效率随Sr的变化趋势
由图7可见:当升力模式Sr小于0.3、阻力模式Sr小于0.4时,平均推进系数Cmx基本上都为负值或者趋于0,此时没有产生推力;在相同拍动幅度下,两种模式的Cmx都随着Sr的增加而增大;当Sr固定不变时,Cmx随着游泳足拍动幅度的增加而逐渐降低;推进效率η随着Sr的增加呈现先增大后减小的趋势,基于升力推进模式3种不同拍动幅度的推进效率η最大值都出现在Sr为0.4~0.6范围内,这与鱼类尾鳍推进的Sr(0.2 4.4 拍动频率对游泳足水动力性能影响 图8所示为当Re=2.75×10-4、φBPA=30°、U=0.1 m/s时,两种推进模式下拍动频率f对Cmx和η的影响曲线。 图8 推进力和推进效率随拍动频率的变化 由图8可知,两种推进模式的Cmx随着拍动频率的增加而增大,与此同时推进效率η呈现先增大后减小趋势,近似为抛物线形状,可见在相同的来流速下,游泳足的拍动频率越高,产生的水动力越大。但是,拍动频率并非越高越好,当水动力随着频率的升高而增加的同时,拍动游泳足所消耗的输入功率也随之增加。因此,存在一个最佳的拍动频率:升力模式的效率峰值出现在0.75~0.85 Hz之间,约为18.75%;阻力模式的效率峰值出现在0.95~1.05 Hz之间,约为6.78%。在整个拍动频率范围内升力模式推进的效率都高于推力模式,由此可知,推进模式对机器人的游动性能有很大影响[13]。 4.5 水翼厚度对游泳足水动力性能的影响 为研究游泳足水翼厚度对水动力学性能的影响,设计了3种不同厚度的水翼,分别命名为薄翼(TNF)、中厚翼(MDF)和厚翼(THF)。表1所示为3种不同水翼的几何参数,其中展弦比为游泳足的弦长和水翼面积的比值,Keef为3个不同厚度翼的规范化等效刚度,该参数通过有限元分析软件NASTRAN/PATRAN分析获得,然后相对于TNF翼型进行规范化处理。 表1 仿海蟹机器人游泳足水翼特性 为了比较不同厚度水翼的推进效率,在实验中测量了游泳足拍动系统的总功耗,包括机械损耗、有用功和尾迹损耗3部分,采用伏安法,通过测量驱动系统的瞬时电压和电流代入下式获得游泳足平均功率损耗[21] (9) 式中:Ui、Ii分别代表驱动系统的瞬时电压和电流;Δt为采样时间间隔,实验中采样频率设定为10 Hz;n为一个拍动周期的采样点数。 图9所示为实验得到的平均推进力Fmx随游泳足拍动频率和平均输入功率的变化曲线。由图9a可知,当拍动频率固定不变时,两种推进模式的平均推进力Fmx都随着水翼厚度的增加而逐渐降低。当水翼厚度不变时,随着拍动频率的增加,Fmx呈线性增加趋势,受驱动器本身性能的影响,当拍动频率大于1.3 Hz时,游泳足已无法达到设定的拍动幅值,继续增大f,Fmx反而呈下降趋势。由此可见,相对薄的翼可以产生更大的推进力。分析图9b可知,无论是升力模式还是阻力模式,平均推力曲线斜率随着水翼厚度的增加而变小,其中TNF翼型的曲线斜率最大,MDF次之,THF斜率最小,可见产生相同的推进力,相对薄的水翼可以减少系统的能量损耗。 (a)推力随拍动频率变化曲线 (b)推力随输入功率变化曲线图9 游泳足水翼厚度对水动力性能的影响 图10 不同厚度水翼的能耗比较 为了使结果看起来更加容易,在此给出当游泳足运动参数φBPA=30°、f=1 Hz、φTCA=30°时的归一化平均功率损耗直方图,如图10所示。由图可见,在两种推进模式下,随着水翼厚度的增加,系统的能耗都相应的增大,在相同运动参数下,TNF翼型与THF翼型相比可降低系统能耗约14.5%。因此,较薄的水翼,不仅可以产生较大的推力,而且还能降低系统的能耗。文献[22]对胸鳍推进机器鱼水翼厚度对水动力学性能进行研究,发现在回摆阶段较厚的水翼压差阻力比较明显,随着水翼厚度的增加,推力系数和推进效率都减小,但是黏性阻力系数基本保持不变,因此较薄的翼更适合推进,与本文研究结论基本一致。 本文在对生物梭子蟹的生理结构和推进机理研究的基础上,将爬行推进技术与拍动翼技术相融合,设计了具有足桨耦合驱动的仿海蟹机器人,并对仿海蟹机器人游泳足推进装置的水动力性能进行了数值模拟计算和低速水洞实验,得到结论如下。 (1)游泳足采用升力模式推进,在上拍和下挥过程中均产生了正推力,且下拍过程产生了较大的推力,而采用阻力模式推进只在游泳足后摆周期对机器人做有效功,因此基于升力模式游动效率较高。 (2)平均推力系数随着游泳足拍动幅度的增加呈下降趋势,相应的推进效率也大幅降低,当拍动幅度为10°时平均推进效率达到最大。 (3)当拍动频率固定时,平均推进效率随着Sr的增加呈现先增大后减小的趋势,升力模式的推进效率η峰值出现在Sr为0.4~0.6范围内,阻力模式出现在Sr为0.8~1.0范围内,此时两者尾涡脱泻均呈反卡门涡街形式,在尾端形成射流时使均推力得到增强,效率达到最高。 (4)两种模式的平均推进效率都随着拍动频率的增加呈现先增大后减小的趋势,升力模式的效率峰值出现在0.8 Hz约为18.75%,而阻力模式出现在1.0 Hz约为6.78%,当仿海蟹机器人处在高速水流环境下,可通过适当提高游泳足拍动频率的方法应对来流阻力影响。 (5)随着游泳足水翼厚度的减少,平均推力系数呈明显增加的趋势,同时对应的系统总能耗下降,从而导致了平均推进效率的增加,因此较薄的水翼更适合仿海蟹机器人的推进。 [1] 王兆立, 苏玉民, 李彦丽, 等. 非定常流场中机械胸鳍的水动力性能分析 [J]. 哈尔滨工程大学学报, 2009, 30(5): 536-541. WANG Zhaoli, SU Yumin, LI Yanli, et al. Hydrodynamic analysis of a mechanical pectoral fin in unsteady flow [J]. Journal of Harbin Engineering University, 2009, 30(5): 536-541. [2] 苏玉民, 张曦, 杨亮. 摆动尾鳍水动力性能的试验和数值研究 [J]. 海洋工程, 2012, 30(3): 150-158. SU Yumin, ZHANG Xi, YANG Liang. Experimental and numerical study on hydrodynamic performance of a flapping caudal fin [J]. The Ocean Engineering, 2012, 30(3): 150-158. [3] LIN Longxin, XIE Haibin, ZHANG Daibing, et al. Supervised neural Q_learning based motion control for bionic underwater robots [J]. Journal of Bionic Engineering, 2010, 7(S1): 177-184. [4] MOHSENI K. Pulsatile vortex generators for low-speed maneuvering of small underwater vehicles [J]. Ocean Engineering, 2006, 33(16): 2209-2223. [5] 陈甫, 藏希喆, 闫继宏, 等. 适合航行的六足仿生机器人Spider的研制 [J]. 吉林大学学报: 工学版, 2011, 41(3): 765-770. CHEN Fu, ZANG Xizhe, YAN Jihong, et al. Development of navigable hexapod biomimetic robot Spider [J]. Journal of Jilin University: Engineering and Technology Edition, 2011, 41(3): 765-770. [6] VAIDYANATHAN R, CHIEL H J, QUINN R D. A hydrostatic robot for marine applications [J]. Robotics and Autonomous Systems, 2000, 30(1): 103-113. [7] 吕坤, 谢永慧, 张荻. 非正弦振型对沉浮翼型推力产生的影响 [J]. 西安交通大学学报, 2013, 47(9): 55-59. LÜ Kun, XIE Yonghui, ZHANG Di. Numerical study of nonsinusoidal motion effect on plunging airfoil propulsion [J]. Journal of Xi’an Jiaotong University, 2013, 47(9): 55-59. [8] 杨思凉, 陈惠莲, 戴爱云. 中国动物志: 无脊椎动物(第四十九卷) 甲壳动物亚门、十足目、梭子蟹科 [M]. 北京: 科学出版社, 2012: 213-260. [9] SLEINIS S, SLIVEY G E. Locomotion in a forward walking crab [J]. Journal of Comparative Physiology, 1980, 136(4): 301-312. [10]VIDAL-GADEA A G, RINEHART M D, BELANGER J H. Skeletal adaptations for forwards and sideways walking in three species of decapod crustaceans [J]. Arthropod Structure & Development, 2008, 37(2): 95-108. [11]BLAKE R W. The mechanics of labriform locomotion: I Labriform locomotion in the angelfish (pterophyllum eimekei): an analysis of the power stroke [J]. The Journal of Experimental Biology, 1979, 82(1): 255-271. [12]SUZUKI H, KATO N. A numerical study on unsteady flow around a mechanical pectoral fin [J]. International Journal of Offshore and Polar Engineering, 2005, 15(3): 161-167. [13]SUZUKI H, KATO N, SUZUMORI K. Load characteristics of mechanical pectoral fin [J]. Experiments in Fluids, 2008, 44(5): 759-771. [14]LINDSEY C C. Form, function and locomotory habits in fish [M]. New York, USA: Academic Press, 1978: 1-100. [15]WALKER J A, WESTNEAT M W. Kinematics, dynamics, and energetics of rowing and flapping propulsion in fishes [J]. Integrative & Comparative Biology, 2002, 42(5): 1032-1043. [16]VIDAL-GADEA A G, BELANGER J H. The evolutionary transition to sideways-walking gaits in brachyurans was accompanied by a reduction in the number of motor neurons innervating proximal leg musculature [J]. Arthropod Structure & Development, 2013, 42(6): 443-454. [17]VIDAL-GADEA A G, BALANGER J H. Muscular anatomy of the legs of the forward walking crab, libinia emarginata (decapoda, brachyura, majoidea) [J]. Arthropod Structure & Development, 2009, 38(3): 179-194. [18]WANG Huaming, ZOU Zaojian, TIAN Ximin. Computation of the viscous hydrodynamic forces on a KVLCC2 model moving obliquely in shallow water [J]. Journal of Shanghai Jiaotong University: Science, 2009, 14(2): 241-244. [19]牛传猛, 毕树生, 蔡日月, 等. 胸鳍摆动推进仿生鱼的设计及水动力实验 [J]. 机器人, 2014, 36(5): 535-543. NIU Chuanmeng, BI Shusheng, CAI Riyue, et al. Design and hydrodynamic experiments on bionic robotic fish with oscillating pectoral fins [J]. Robot, 2014, 36(5): 535-543. [20]TRIANTAFYLLOU M S, TRIANTAFYLLOU G S, YUE D K P. Hydrodynamics of fishlike swimming [J]. Annual Review of Fluid Mechanics, 2000, 32(1): 33-53. [21]TAYLOR G K, NUDDS R L, THOMAS A L R. Flying and swimming animals cruise at a Strouhal number tuned for high power efficiency [J]. Nature, 2003, 425(6959): 707-711. [22]HU Wenrong. Hydrodynamic study on a pectoral fin rowing model of a fish [J]. Journal of Hydrodynamics: Ser B, 2009, 21(4): 463-472. (编辑 杜秀杰) Hydrodynamic Analysis and Experimental Research on Swimming Leg of Crablike Robot WANG Hailong1,WANG Gang2,CHEN Xi3,WANG Liquan1,JIN Lixing1 (1. College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China;2. State Key Laboratory of Autonomous Underwater Vehicle, Harbin Engineering University, Harbin 150001, China;3. College of Mechanical and Electrical Engineering, Heilongjiang Institute of Technology, Harbin 150001, China) A new leg-paddle coupling crablike robot is developed based on the bionic prototype of portunus trituberculatus. The construction with three pairs of walking legs and one pair of swimming legs is adapted for the robot. By the composite propulsion of waking legs and flapping hydrofoil, the robot is endowed with the ability of walking and swimming under water to indicates the characteristics of morphological and functional bionics. Numerical simulations and water tunnel experiments are carried out to obtain the hydrodynamic performance of swimming legs. It is found that both the upstroke and downstroke phases generate propulsive load to lead to much higher propulsive efficiency when the hydrofoil is in the lift-based swimming mode. The average thrust and propulsive efficiency decreases apparently with the increasing flapping amplitude. The relationships between the propulsive efficiency and flapping frequency are like a parabola. The maximum propulsive efficiency of the lift-based swimming mode is achieved at Strouhal number of 0.4-0.6, and the propulsive efficiency reaches the maximum value at Strouhal number of 0.8-1.0 for the drag-based swimming mode. The wake structures of the two modes are characterized by reverse Karman vortex street. Furthermore, the effects of hydrofoil thickness of swimming leg on hydrodynamic performance are investigated, and the results show that the average thrust of much thinner hydrofoil is higher as well as less energy consumption, indicating that thinner hydrofoil is favorable for propulsion performance. crablike robot; swimming leg; hydrodynamic performance; swimming mode 2014-12-16。 作者简介:王海龙(1988—)男,博士生;王立权(通信作者),男,教授,博士生导师。 基金项目:国家自然科学基金青年基金资助项目(51409058);国家自然科学基金资助项目(60875067);黑龙江省自然科学基金资助项目(F201205)。 时间:2015-05-04 10.7652/xjtuxb201508013 TP242 A 253-987X(2015)08-0075-09 网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20150504.0900.002.html




5 结 论
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
幼儿画刊(2021年6期)2021-12-02 15:02:32
海洋技术学报(2021年3期)2021-08-19 11:07:04
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:20
装备制造技术(2020年1期)2020-12-25 05:18:18
空间科学学报(2020年4期)2020-04-22 01:17:20
音乐天地(音乐创作版)(2019年7期)2019-09-19 12:34:02
厦门理工学院学报(2016年1期)2016-12-01 04:50:53
小学生导刊(2016年2期)2016-04-11 05:25:14
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03