基于正交高速摄影的人枪动态特性实验研究
2015-12-26 06:36:34宫鹏涵周克栋黄雪鹰张俊斌
弹道学报 2015年3期
宫鹏涵,周克栋,赫 雷,黄雪鹰,张俊斌
(1.南京理工大学 机械工程学院,南京210094;2.军械工程学院 火炮工程系,石家庄050003;3.中国人民解放军63856部队,吉林 白城137001)
自动步枪抵肩射击的过程是由步枪和射手构成的人枪系统在火药燃气、活动机件撞击等冲击载荷作用下的动态响应过程。清楚了解武器射击时人枪系统的运动特性,如枪械的水平后坐、水平侧偏和垂直俯仰等运动参数,对于人枪系统动力学模型的建立及人枪最佳动力匹配的研究具有重要的意义。国内南京理工大学李永新、包建东等人曾通过在射手上方放置一倾斜45°的平面镜,运用单台高速摄影机在一个视角同时获得56式7.62mm冲锋枪射击时枪械在水平和垂直2个方向上的运动[1-3]。但由于当时实验设备及实验条件有限,通过平面镜反射反映的特征点坐标受实验环境因素影响较大。
某无托型自动步枪是我军装备数量最大、适用范围最广的单兵作战武器,国内学者围绕该武器就如何提高射击精度,改善人机工效等方面进行了大量的研究,但对该武器射击时人枪系统实际运动规律的研究还未见报道。本研究以该无托型自动步枪为研究对象,运用2台高速摄影机从右侧和顶部2个视角同步测量的方法获得该步枪连发射击时人枪系统的运动过程,着重分析枪械的水平后坐、水平侧偏和垂直俯仰这3个运动的测量与数据处理方法。研究结果对于完善枪械的结构设计、提高枪械的射击精度具有重要的参考价值。
1 人枪动态特性高速摄影测试系统
由于火药燃气与枪械运动件作用在枪身的载荷持续时间很短,均属于ms级,具有冲击载荷的特点,人、枪运动状态的变化十分剧烈。根据测量方法的不同,人枪运动的测量主要分为2种:一是采用惯性式传感器实施接触式测量,二是采用光电或摄影法实施非接触测量[4]。其中,高速摄影作为非接触测量的一种,不仅能跟踪物体高速运动变化的过程,还能为高速动态实验提供丰富的实验信息[5-6]。本研究所建立的人枪动态特性高速摄影测试系统的架构如图1所示。该系统由摄影和图像处理2部分组成,通过在人体及自动步枪上的主要部位固定若干标记点,运用摄影部分和图像处理部分识别和处理这些标志,以测得相应的数据。
摄影部分选用的美国IDT Y3-S2型和Phantom V641型2台高速摄影机均采用先进的传感器技术,分辨率高、曝光时间短,最大帧率可达140 000s-1,不仅有利于消除动态像移,获得清晰的图像,还具有适应性强的同步装置,能够满足人枪动态特性实验运动变化剧烈的特点,较好地观测、记录射击时人枪系统的运动过程;图像处理部分选用软件ProAnaly,该软件是专为录影中测量的运动数据、运动规律而设计的一个全向性自动跟踪和数据分析软件,能自动跟踪及测量视频中物体各项动态数据。

图1 人枪动态特性高速摄影测试系统
2 实验方案与方法
人枪动态特性实验中,测试对象是由射手和某无托型自动步枪组成的人枪系统。射击时,射手手持该自动步枪抵右肩立姿射击。
2.1 运动特征点的设置
射手射击时,步枪在空间中的运动可分解为枪的后坐运动、枪的侧偏运动和枪的俯仰运动,人枪系统相对于人体臀部有明显的俯仰和水平扭转运动。围绕射击时这些人枪运动参数的定量获取,依据人体主要关节分布情况、自动步枪的结构及立姿射击时人枪运动的特点,在武器和射手身上设置6个运动特征点,如图2所示。各特征点:①位于枪管右侧,消焰器后端;②位于下护盖右侧后端,与机匣连接处;③位于人体右肩,肩胛右侧;④位于人体腰部,右胯附近;⑤位于枪管上部,消焰器后端;⑥位于瞄准镜连接座上部,照门前端。

图2 人枪系统特征点布置示意图
用2台高速摄影机分别从右侧和顶部2个方向读取这些标记点的运动(位置变化)。由特征点①、②的位置变化可确定步枪前后位移参数。此外,为获取枪身俯仰、枪身侧偏、人体俯仰的运动情况,可分别作①、②测点,③、④测点及⑤、⑥测点间的连线,求出各直线的斜角。射击过程中斜角的变化就是枪身俯仰、人体俯仰及枪身侧偏的变化。以①、②测点为例,确定枪身俯仰角变化的计算方法为
式中:α为俯仰的直线斜角,Δα为俯仰角位移,下标i表示捕获的特征点次序;X1,Y1分别表示右视图中测点①的横坐标和纵坐标;X2,Y2分别表示右视图中测点②的横坐标和纵坐标。
由于射击时人枪系统的运动是既有转动、又有后坐平动的多自由度空间运动,在对人枪运动特征点拍摄和解析过程中,中间处理环节较多,不可避免地会引入各种误差来源。尤其是人体上的测点③、④,由于人体在步枪冲击作用下的变形,不便由其上读取特征点的运动来确定人体的整体运动,只能对其加以估计。
2.2 高速摄影机的设定
该自动步枪射频600min-1,3发点射自动机完成3次射击循环大约需要0.3s,其中自动机复进到位对机匣撞击时间最短(约1ms)。因此,以该时间为最小识别范围,要想细致捕捉武器射击时各特征时刻对枪口位置影响的动态特性参数,采样频率应大于分析频率的2倍,即摄影机的拍摄帧率必须达到2 000s-1以上。实验时,根据运动特征点的大小及人、枪运动的幅度,以能清晰捕捉到特征点的运动轨迹为目标,综合考虑摄影机放置距离、焦距、曝光时间等因素,设置右侧的高速摄影机分辨率为1 280×800像素;设置上方的高速摄影机分辨率为1 248×1 600像素;根据以往经验及射击时步枪的实际运动情况,步枪的俯仰较水平侧偏明显,因此,设置右侧的高速摄影机拍摄速度为4 800s-1,为便于同步分析某一时刻枪身的俯仰和侧偏情况,设置上方高速摄影机的拍摄频率为右侧摄影机拍摄频率的一半,即2 400s-1。
2.3 实验视频数据的采集与存储
为保证能拍摄到实验射手瞄准、扣扳机、击发、后坐等所需的全过程,采用相同的下降沿触发信号同时触发2台高速摄影机,采集触发前1 000ms及触发后4 000ms的所有视频数据,保存时采用MOTION PRO软件进行视频快速预览,然后存贮有效的图像信息。
3 实验数据处理
3.1 实验数据提取
将高速摄影所获得的视频文件导入ProAnalyst软件,首先设定视频采集频率和图像文件比例尺,然后定义图像跟踪区域以及跟踪目标点进行自动跟踪,最后选择需要输出的各特征点位移、速度的数据文件。
3.2 基于小波分析的实验信号提取
受到人体及武器固有频率、高速摄影系统本身存在的跟踪误差以及光照等各类因素的影响,通过ProAnalyst软件分析获得的实验数据含有较大的噪声。在对这种非稳态、信噪比低的含噪信号识别中,如何保留信号中的特征点就显得尤为重要。
小波分析作为一种信号的时间频率分析方法,能够聚焦到信号的任意细节进行多分辨率的时频分析,在降噪领域得到了较大的应用[7-10]。小波降噪通常通过以下4个步骤实现[8]:
①对含噪信号进行预处理,便于后续处理;
②对含噪信号进行小波变换,求各尺度的小波系数;
③小波分解高频系数的阈值化,即根据设定阈值函数和阈值对信号进行去噪处理;
④小波逆变换重构信号。
从以上4个步骤可以看出,如何选择阈值和如何利用阈值来量化小波系数是小波降噪的关键所在,它直接影响到信号消噪的质量。国内外学者围绕最优阈值做了大量的研究工作,文献[11]针对水下目标的信号信噪低且真实的信号被淹没在噪声之中的特点,提出了一种基于自适应阈值函数的小波去噪方法,该方法能够在滤除噪声的同时很好地保留信号的奇异性特征。针对人枪动态特性高速摄影获取数据噪声大的特点,本研究采用基于自适应阈值函数的小波阈值去噪方法,选择阈值函数:
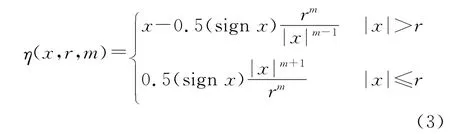
式中:x为获得的原始信号,r为阈值,m为参数。m值越小,处在临界区的小波系数就越多,可以在收缩噪声系数的情况下更好地保留信号细节小波系数,从而保持信号原有的局部特征点信息。
降噪处理时,首先根据该阈值函数获取各个尺度上的最佳阈值函数,进而利用Stein Unbiased Risk Estimate无偏估计求取最小均方差意义上的最佳阈值进行去噪处理,最后通过小波逆变换获得去噪后的信号。图3是运用ProAnalyst软件直接获得的单发射击时枪身前后方向速度曲线,图4是采用自适应阈值函数小波去噪后的速度曲线,结果显示使用该滤波方法在滤除噪声的同时能够较好地保留人枪系统运动特征点的细节信息,图中各特征点:a表示击锤撞击击针时,对枪身向前较小的冲击;b表示枪弹发火后,枪膛合力对枪身向后的冲击;c表示抛壳时弹壳撞击抛壳挺引起枪身前后速度的变化;d表示自动机后坐到位撞击缓冲器及枪托时对枪身的冲击;e表示枪机向前推下一发枪弹时,枪机与枪弹碰撞对枪身向后较小的冲击;f表示枪机推弹及枪机启动斜面与机匣节套启动斜面相接产生的碰撞对枪身前后运动的影响;g表示自动机向前复进到位时对枪身的冲击。
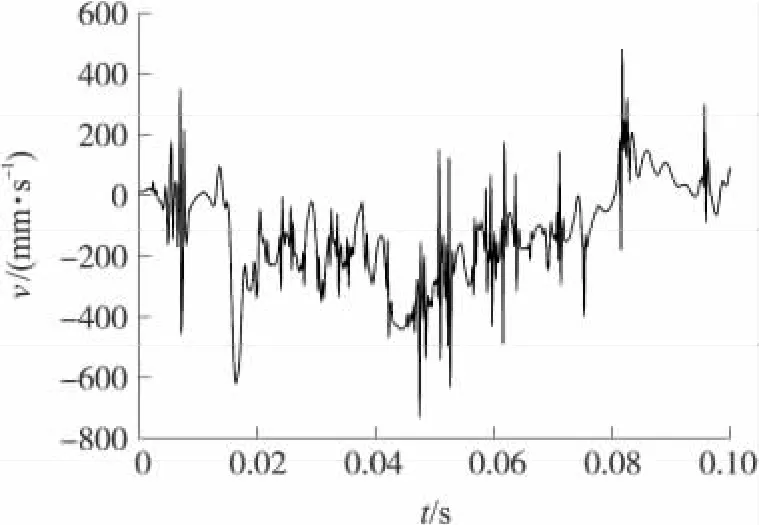
图3 ProAnalyst软件获得的枪身速度曲线
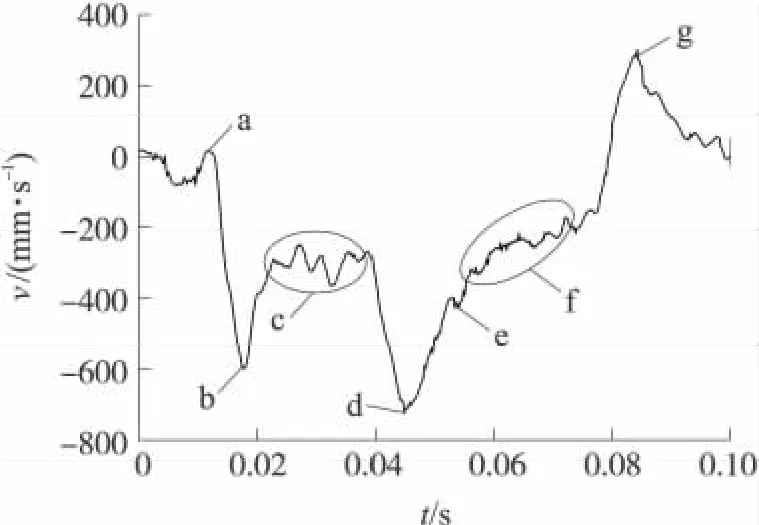
图4 降噪后的枪身速度曲线
4 实验结果分析
为了保证实验结果的准确性及有效性,实验对1名射手分别进行了20次3连发射击高速摄影运动捕捉,测量结果表明,尽管人、枪运动的特征值大小略有散布,但人、枪运动轨迹的波形是相似的,射击过程中枪支上跳、后坐的总趋势是一致的。其中1组3发点射时各运动特征点的运动特性如图5~图11所示,图中,s1为前后位移。
由图5可以看出,在第1发枪弹发火的瞬间,人体肩部的水平坐标相对于枪托的水平坐标有一滞后量,约5.3mm,这是枪身后坐压缩射手肩部的肌肉、骨骼的过程。肩部的软组织被压实之后,人体随枪身一同后坐。
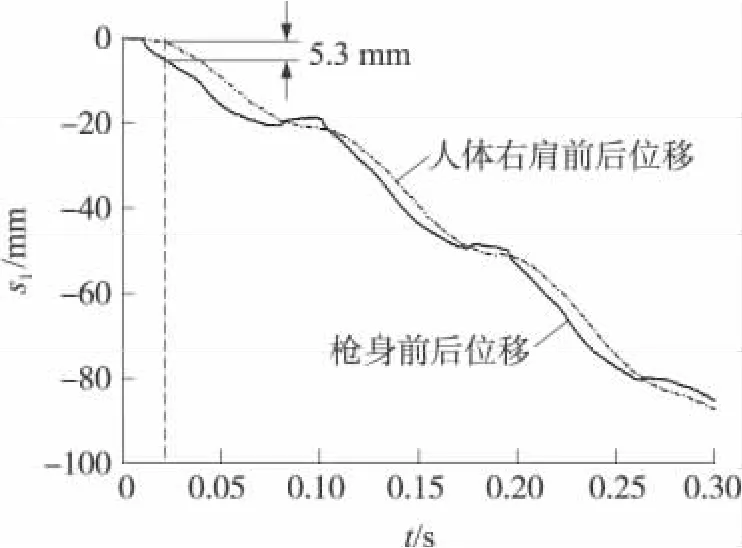
图5 人枪前后方向位移曲线
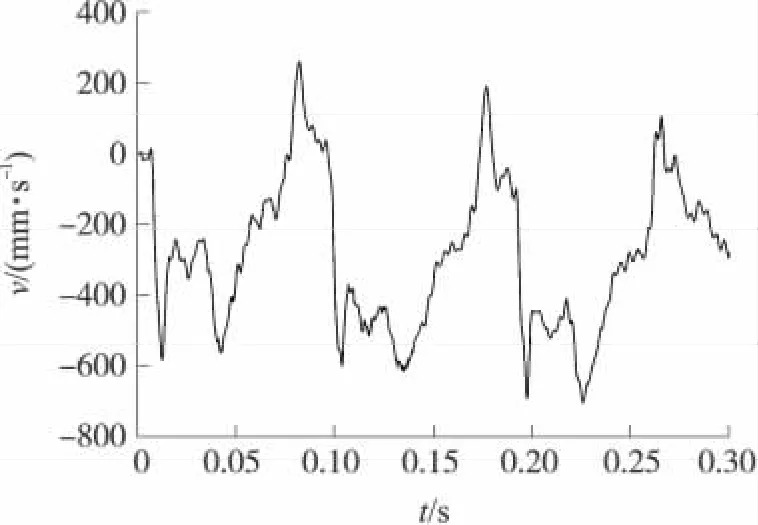
图6 枪身前后方向速度曲线
由图6可以看出,自动步枪实际射击时的工作循环大约为90ms左右。在一个射击循环中,枪身速度在前后方向共有6次比较明显的变化,具体标示见图4,其中,枪膛合力的作用(b)、自动机后坐到位的撞击(d)和自动机复进到位的撞击(g)对枪身运动的影响较大。
由于消焰器固定在枪管前端,图2中特征点①的位移变化基本可以反映枪口的上下位移变化[12],如图7所示。由图7枪口上下位移s2的变化曲线可以看出,枪身上下位移变化在23mm左右,远小于枪身前后方向位移的变化。
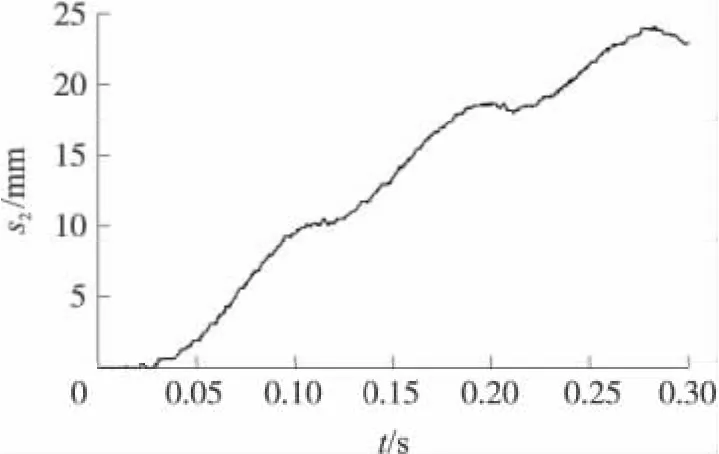
图7 枪口上下方向位移曲线
由图8~图11可以看出,枪械的俯仰运动要比偏转剧烈。图中,θ是枪身俯仰角位移,ψ是枪身侧偏角位移,ω1是枪身俯仰角速度,ω2是枪身侧偏角速度,3发点射结束的瞬间,枪口俯仰角位移向上偏转约0.05rad。
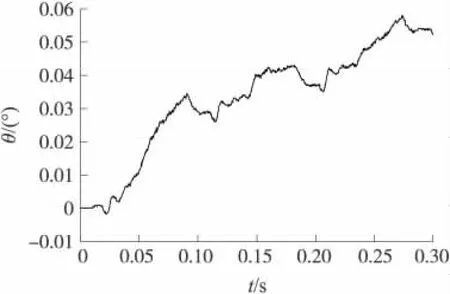
图8 枪身俯仰角位移曲线
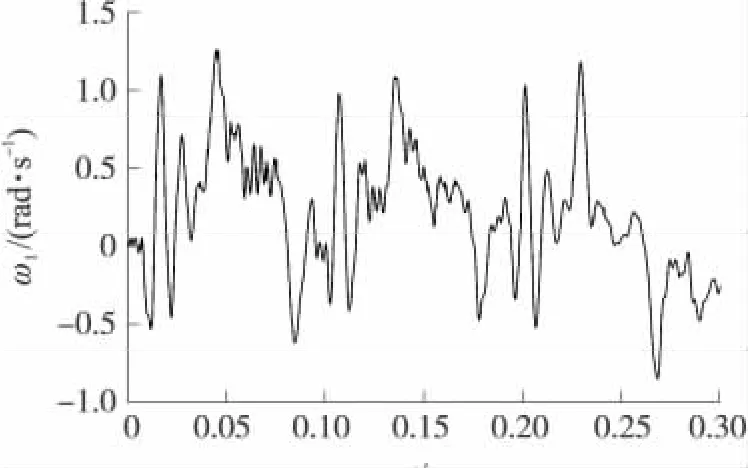
图9 枪身俯仰角速度曲线
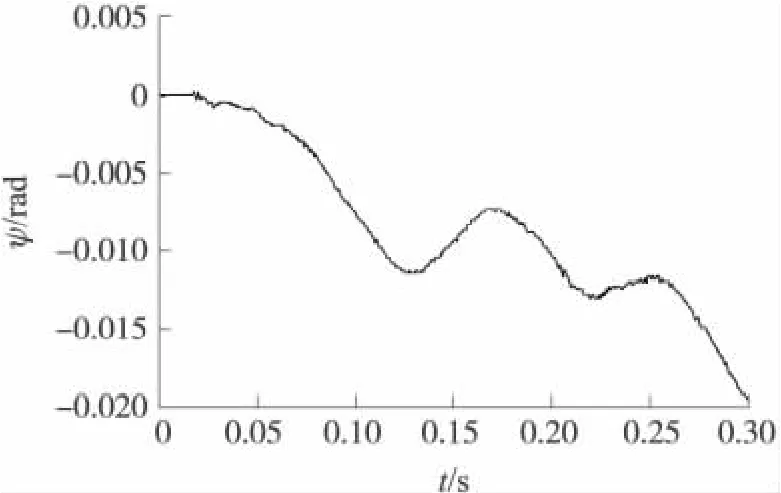
图10 枪身侧偏角位移曲线
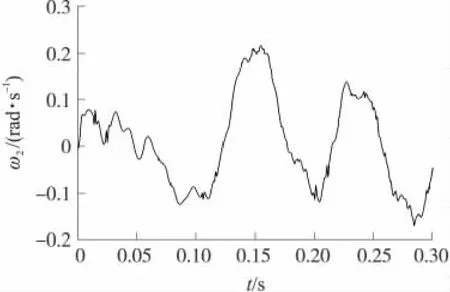
图11 枪身侧偏角速度曲线
由图5、图8、图10可以看出,枪膛合力尽管对枪身后坐速度影响较大,但由于其作用时间非常短,其作用期间对枪口角位移的变化较小,均在0.02rad以内。为进一步分析枪膛合力、自动机后坐到位和复进到位撞击对该步枪3发点射射击精度的影响,根据弧度与角度的变化关系,计算各特征时刻枪口的俯仰角度变化,如表1所示。

表1 枪口俯仰角及侧偏角变化
表1中每一发枪弹中记录的3个时刻分别表示每发枪弹射击过程中枪膛合力达到最大、自动机后坐到位和自动机复进到位时枪身角位移的变化情况。自动机后坐到位时,枪口角位移并未达到最大,如第1发射击0.045s后坐到位时,枪口上仰0.65°;0.084s自动机向前复进到位时,枪口上仰为1.80°。这是由于步枪对人体的冲击使人体姿态也发生了一定的变化,从而进一步说明连发射击时射手合理控制步枪对于提高射击精度具有重要的作用。
5 结论
①采用正交高速摄影的测量方法获得了某无托型自动步枪立姿连发射击时的人枪系统运动特性,其中包括枪械的水平后坐、水平侧偏和垂直俯仰等运动参数。
②实验结果表明,人枪系统的运动规律与该自动步枪发射时自动机实际运动传递给人枪系统的激励相关,其中枪膛合力的作用、自动机后坐到位的撞击和自动机复进到位的撞击对枪身的运动影响较大。
[1]孙海波,孔德仁,李永新,等.人枪系统动态特性实验测定[J].振动工程学报,2000,10(5):753-757.SUN Hai-bo,KONG De-ren,LI Yong-xin,et al.Dynamic characteristics test on man-weapon system[J].Journal of Vibration Engineering,2000,10(5):753-757.(in Chinese)
[2]李永新,朱明武,孙海波,等.人枪系统动力响应研究[J].兵工学报,1999,20(1):8-12.LI Yong-xin,ZHU Ming-wu,SUN Hai-bo,et al.Dynamic response of man-weapon system[J].Acta Armamentarii,1999,20(1):8-12.(in Chinese)
[3]包建东,王昌明,孔德仁,等.人枪运动对射击精度影响的实验研究[J].仪器仪表学报,2006,27(6):1 274-1 276.BAO Jian-dong,WANG Chang-ming,KONG De-ren,et al.Experimental research of man-gun movement influencing automatic firing accuracy[J].Chinese Journal of Scientific Instrument,2006,27(6):1 274-1 276.(in Chinese)
[4]LEE Y S,CHOI Y J,HAN K H,et al.A study on the human impulse characteristics of the standing shooting posture[J].Key Engineering Materials,2005,297:2 314-2 319.
[5]吝曼卿,夏元友,肖正学,等.弹丸侵彻高强度混凝土的高速摄影试验研究[J].岩土力学,2012,33(11):178-183.LIN Man-qing,XIA Yuan-you,XIAO Zheng-xue,et al.Experimental investigation of projectile penetrating high strength concrete target with high-speed photography[J].Rock and Soil Mechanics,2012,33(11):178-183.(in Chinese)
[6]高航,张继春,肖正学,等.利用轻气炮进行侵彻试验的高速摄影法探索[J].弹道学报,2011,23(1):75-79.(in Chinese)GAO Hang,ZHANG Ji-chun,XIAO Zheng-xue,et al.Research on projectile impacting target by means of light gas gun withspeed photography[J].Journal of Ballistics,2011,23(1):75-79.(in Chinese)
[7]吴升,张强,肖伯祥,等.一种新的光学运动捕捉数据处理方法[J].计算机应用研究,2009,26(5):1 938-1 940.WU Sheng,ZHANG Qiang,XIAO Bo-xiang,et al.New approach of capture data processing for optical motion[J].Application Research of Computer,2009,26(5):1 938-1 940.(in Chinese)
[8]BEENAMOL M,PRABAVATHY S,MOHANALIN J.Wavelet based seismic signal de-noising using shannon and tsallis entropy[J].Computers and Mathematics with Applications,2012,64(12):3 580-3 593.
[9]刘涛,曾祥利,曾军.实用小波分析[M].北京:国防工业出版社,2006.LIU Tao,ZENG Xiang-li,ZENG Jun.Practical wavelet analysis[M].Beijing:National Defense Industry Press,2006.(in Chinese)
[10]吴伟,蔡培升.基于 MATLAB的小波去噪仿真[J].信息与电子工程,2008,10(5):220-222.(in Chinese)WU Wei,CAI Pei-sheng.Simulation of wavelet denoising based on MATLAB[J].Information and Electronic Engineering,2008,10(5):220-222.(in Chinese)
[11]吴光文,王昌明,包建东,等.基于自适应阈值函数的小波阈值去噪方法研究[J].电子与信息学报,2014,36(6):1 340-1 347.WU Guang-wen,WANG Chang-ming,BAO Jian-dong.A wavelet threshold de-noising algorithm research based on adaptive[J].Journal of Electronics & Information Technology,2014,36(6):1 340-1 347.(in Chinese)
[12]宫鹏涵,周克栋,康小勇,等.某自动步枪发射动力学仿真研究[J].弹道学报,2014,26(1):13-18.GONG Peng-han,ZHOU Ke-dong,KANG Xiao-yong,et al.Simulation of launch dynamics of a rifle[J].Journal of Ballistics,2014,26(1):13-18.(in Chinese)
猜你喜欢
轻兵器(2023年3期)2023-05-30 23:27:52
轻兵器(2022年5期)2022-07-22 10:07:00
轻兵器(2022年5期)2022-07-22 10:06:32
文萃报·周二版(2022年24期)2022-06-16 22:04:19
发明与创新(2021年39期)2021-11-05 07:15:40
小哥白尼(军事科学)(2021年6期)2021-11-02 05:25:16
数学物理学报(2021年3期)2021-07-19 06:02:50
小学生学习指导(小军迷联盟)(2021年3期)2021-03-17 16:47:04
智富时代(2019年4期)2019-06-01 07:35:00
西北大学学报(自然科学版)(2018年2期)2018-04-18 06:53:55