外置蓄能式鱼雷发射装置发射过程流场仿真
2015-12-26 06:36:32练永庆张孝芳
弹道学报 2015年3期
练永庆,郭 煜,张孝芳
(1.海军工程大学 兵器工程系,武汉430033;2.海军潜艇学院 战略导弹与水中兵器系,山东 青岛,266071)
以压缩空气作为发射工质的潜艇鱼雷发射装置[1]普遍存在的问题是发射时强烈的排气噪声和舱室瞬时压力的增高。为了消除和降低舱内排气噪声,许多国家都致力于研制新型的低噪声鱼雷发射装置[2],本文研究的外置蓄能式发射装置[3-4]为其中之一。外置蓄能式发射装置属于水压平衡式发射装置[5-6],为了研究该装置发射过程内部流场特性,为进一步的技术设计做准备,本文对外置蓄能式发射装置的发射过程进行了流场仿真。
1 外置蓄能式鱼雷发射装置方案组成及发射原理
外置蓄能式鱼雷发射装置的基本组成如图1所示。该装置的发射原理为:发射前,首先通过液压泵将液压油压入液腔中,推动活塞组件向左运动压缩气腔内的气体,将发射能量储存在压缩气体中。发射时,打开发射阀,液腔中液压油经发射阀流出,气腔内压缩空气推动活塞组件向右运动,挤压水缸中的海水经滑套阀进水孔进入发射管,从而推动鱼雷出管。
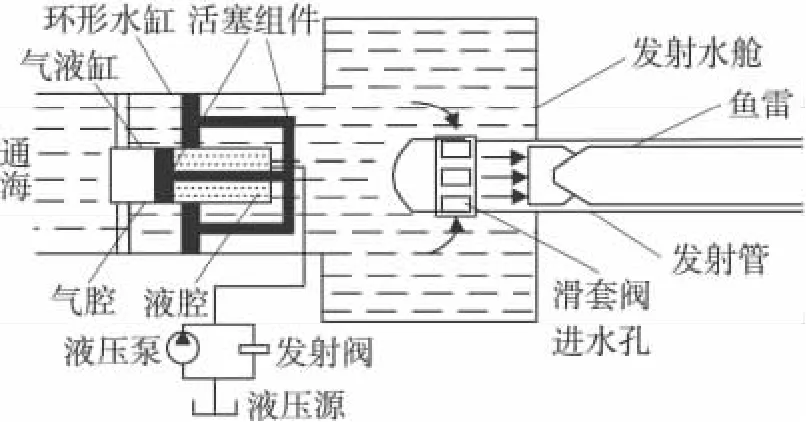
图1 外置式水下蓄能发射装置结构简图
2 发射装置内部二维轴对称瞬态流场仿真
2.1 基于一维数值和CFD联合仿真的内部流场数值模拟方法
由外置蓄能式发射装置方案可知,该装置可分为两大部分:①作为蓄能系统的气液缸,②作为水压平衡系统的环形水缸、发射水舱和发射管。因此,对发射装置的发射过程流场计算需要采取全系统仿真的方案来求解,这样才能够得到较为合理的系统发射过程动态特性。为此,本文提出采用气液缸一维模型和水压平衡系统流场计算模型联合仿真的方案进行系统的数值模拟。即从Fluent解算器得到水缸活塞和鱼雷所受的流体作用力,随后代入气液缸、活塞组件和鱼雷的一维动力学方程组,再利用数值积分方法求出活塞和鱼雷的运动速度,并将其作为Fluent解算器中活塞和鱼雷动边界的运动参数。
2.2 流场仿真相关的一维数学模型
与仿真相关的一维数学模型主要有:气液缸数学模型、活塞组件运动模型和鱼雷运动模型等,这些模型可参见文献[3]。
2.3 流场计算模型与计算区域的选择
选用二维轴对称模型进行发射系统内部流场的数值模拟,计算区域如图2所示,主要包括以下几个部分。
①环形水缸内流体。
环形水缸的关键部件主要为活塞组件,整个水缸流体的计算区域主要由活塞组件组成的运动界面以及由环形水缸壁组成的静止界面包围而成。
②发射水舱流体。
发射水舱是由相关的潜艇耐压壳与非耐压壳组成的相对封闭的充满海水的空间,流体由发射水缸出口进入发射水舱,由发射管特形孔为出口,计算区域全由静止界面组成。
③发射管流体。
由于单侧发射水缸每次发射动作仅能发射一个发射管中的鱼雷,因此计算模型仅考虑单管发射的情形,其他2个发射管不进行建模。发射管壁上包括导轨、密封环等结构,相对于密封环来说,导轨对整个管内流场的影响可以忽略。为了简化问题,在进行发射管建模时,仅保留了前后密封环。这样,发射管内流体计算区域就由鱼雷运动边界和发射管壁静止边界所包围的流体组成。在建模时把鱼雷简化为不带鳍、舵、桨的回转体。
④管外海水。
对于潜艇发射系统来说,管外海水为无限大流体域,但必须使用有限的单元来进行模拟,这里使用一个人工边界对无限域的海水进行截断,在边界上应用压力出口边界条件,静压值设置为0,即该处的压力与环境压力相同,以此来模拟管外的无限流体。
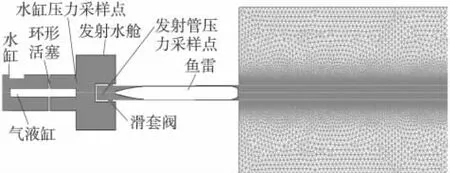
图2 计算区域及网格划分示意图
2.4 包含移动边界瞬态流场的动网格处理
发射装置内部瞬态流场的数值模拟包含环形活塞和鱼雷2个运动物体,环形活塞和鱼雷的运动造成了流场计算区域边界的移动。在瞬态流动计算中,本文采用动网格技术,考虑不同时刻运动域和静止域间的相对位置以及移动边界对计算域网格的影响,准确模拟流体流动与物体运动相互耦合的瞬态流动。
通过分析活塞和鱼雷的运动规律可以发现,发射活塞的运动始终保持在发射水缸的轴线上,鱼雷在出管的过程中其运动方向也始终保持在发射管的轴线上;而当鱼雷出管以后,其运动对发射装置内部的流体流动可以认为已经没有影响。为了问题的简化,这里假设鱼雷出管以后的运动方向仍然保持在发射管的中轴线上。根据鱼雷和活塞的运动特点,动网格的更新方法采用动态层铺法[7-8],该方法用于四边形网格(二维矩形)和柱形网格(三维六面体或楔形体),通过对与动边界相邻的网格单元进行动态的加层或减层的操作从而实现边界的移动和网格的动态更新。在仿真中使用UDF宏函数DEFINE_CG_MOTION来定义网格的运动。
3 仿真结果及分析
在完成流场边界条件、初始条件设置及求解器设置等相关工作后,可对以上流场模型进行仿真。在仿真过程中对鱼雷表面的受力情况进行了监测,监测数据表明整个过程是收敛的。
3.1 仿真结果
1)发射装置内部流场仿真结果。
发射装置内部流场的压力场p和速度场v仿真结果分别见图3和图4。
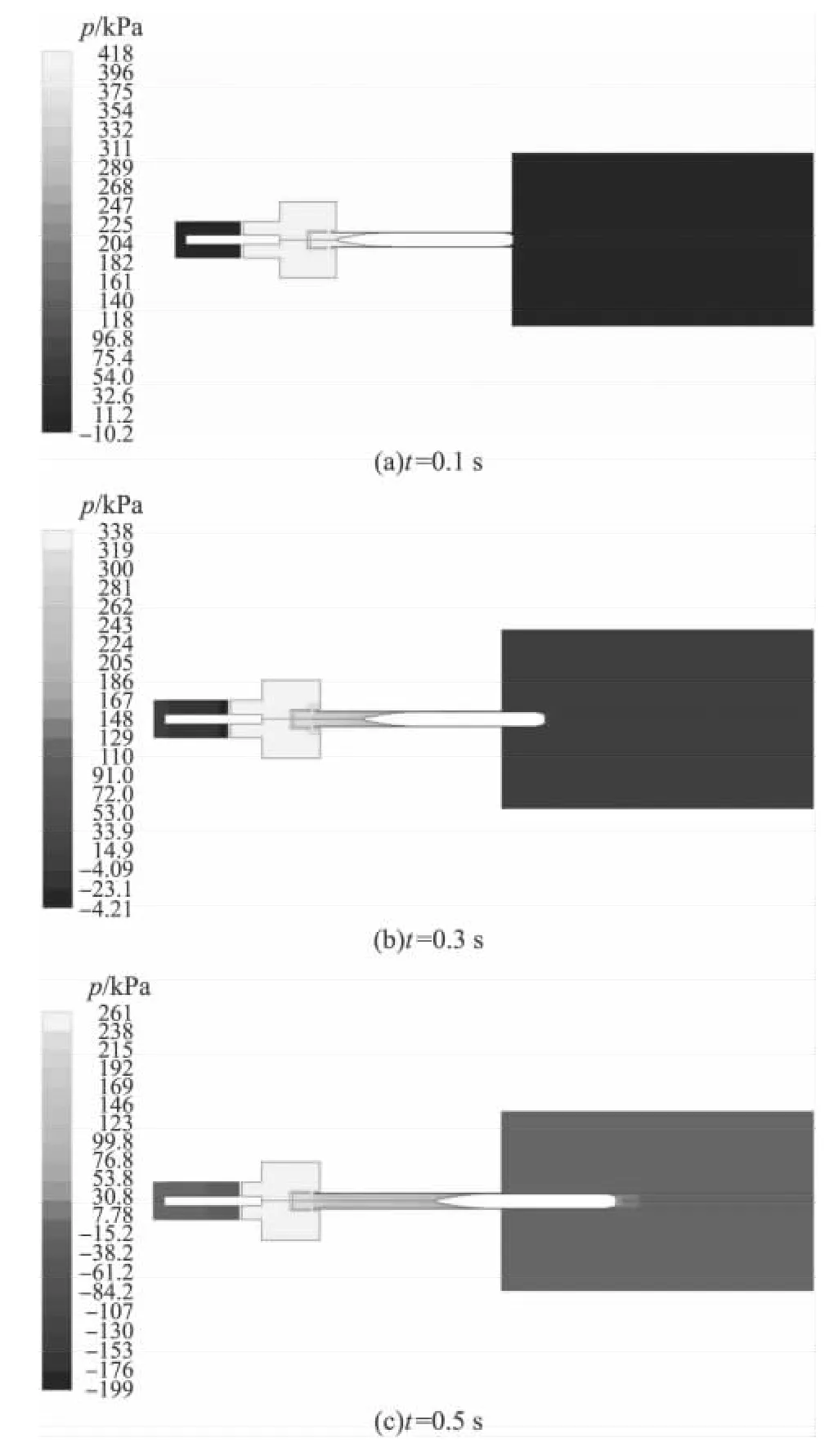
图3 不同时刻流场压力云图
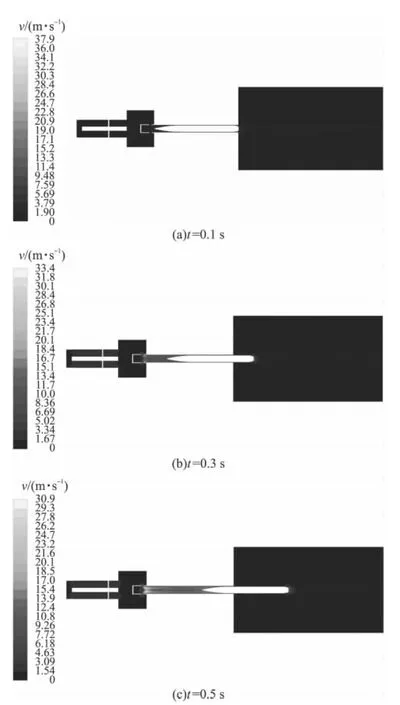
图4 不同时刻速度云图
2)蓄能系统与水压系统仿真结果。
获得的蓄能系统的气液缸内部压力变化仿真结果如图5所示。图中,pc为气液缸中气腔气体的压力,pf为气液缸液腔压力。
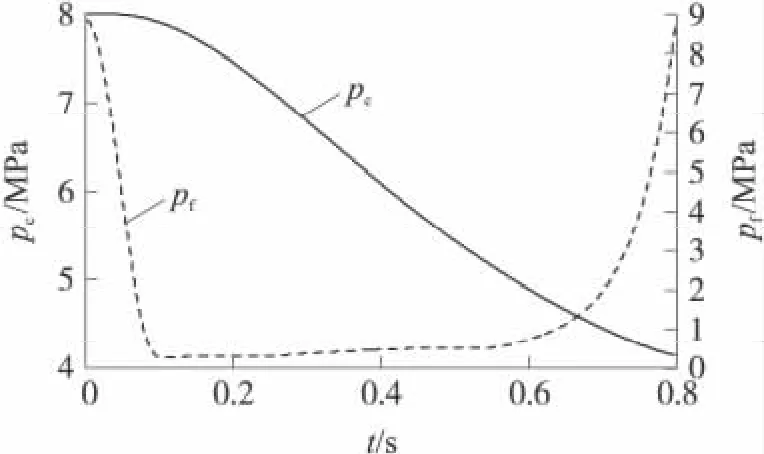
图5 气液缸气腔压力、液腔压力与时间的变化曲线
水缸与发射管压力变化仿真结果如图6所示,图中,pw为水缸压力,pt为发射管压力。

图6 发射水缸、发射管内海水压力-时间变化曲线
3)活塞组件运动特性仿真结果。
活塞组件的位移、速度和加速度仿真结果如图7~图9所示,图中,xp,vp,ap分别为活塞组件运动位移、速度和加速度。
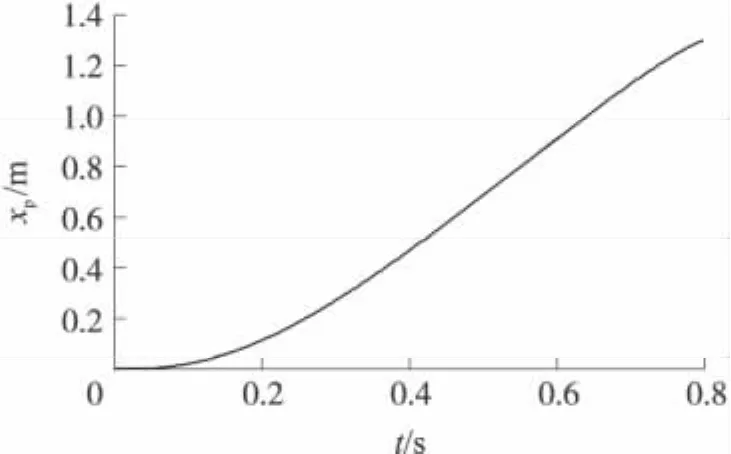
图7 活塞组件位移-时间变化曲线
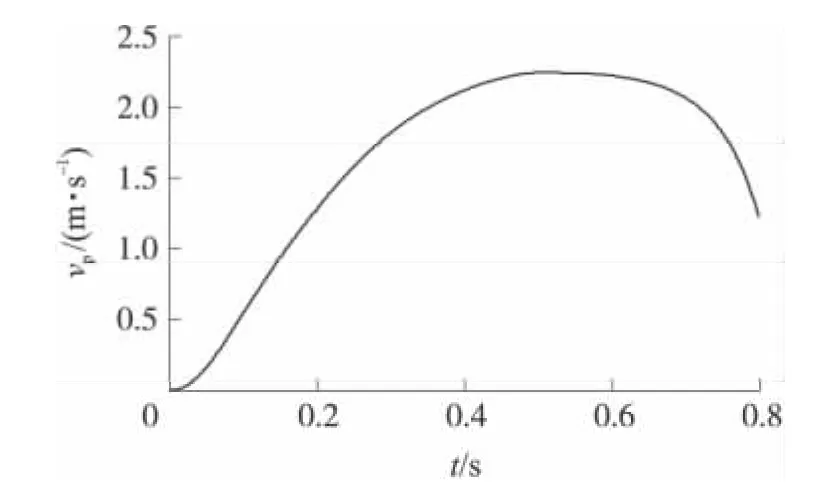
图8 活塞组件速度-时间变化曲线

图9 活塞组件加速度-时间变化曲线
4)鱼雷内弹道仿真结果。
通过联合仿真还获得了发射过程鱼雷内弹道仿真结果。为了验证流场仿真结果的合理性,在同样仿真初始参数条件下,将流场仿真结果与文献[3]数学模型的内弹道计算结果相比较,如图10~图13所示,图中,xt,vt,at分别为鱼雷运动位移、速度和加速度,pt为发射管膛压。
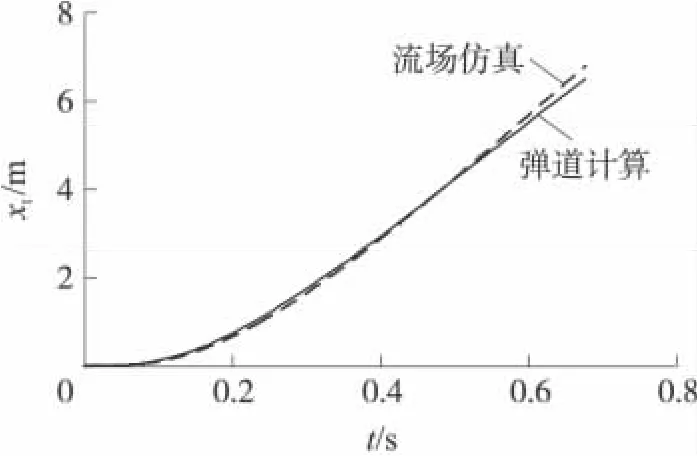
图10 鱼雷位移-时间曲线
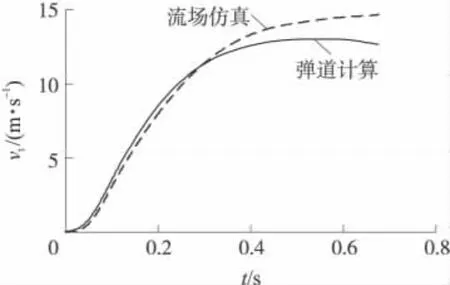
图11 鱼雷速度-时间曲线

图12 鱼雷加速度-时间曲线
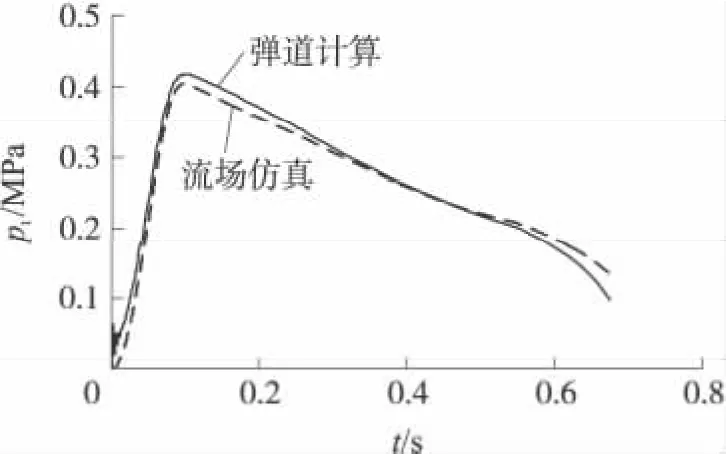
图13 发射管膛压-时间曲线
3.2 仿真结果分析
①由图5气液缸气腔和液腔压力曲线可知,随着活塞的移动,缸内气体体积增大,气腔压力减小;前半段随着发射阀开启面积的增大,液腔内的液压油压力得到泄放,压力是逐渐减小的;而在后期由于发射阀的逐渐关闭以及活塞在惯性以及海水的推动下会对液压油有一个挤压作用,压力呈现出增大的特性。
②由图6水缸及发射管内压力曲线可知,海水压力在0.1s附近达到最大值,然后逐渐下降。在末期出现了负压现象,这是由于鱼雷出管后,管内海水在惯性力的作用下继续运动造成的结果。
③由图9活塞组件的加速度曲线可知,活塞组件的加速度曲线与水缸内海水压力曲线(见图6)的变化规律基本相似,由此可见,在发射过程中水缸内海水压力对鱼雷加速运动起主要作用。从图9可见,活塞组件在0.55s时刻的加速度为负,该时刻是仿真中发射阀关闭时刻。发射阀关闭后,由于液压油的压缩特性,此时活塞的速度并没有迅速降到0,而是有一个逐步减小的过程(见图8),再结合图5气液缸液腔压力特性曲线以及流场仿真压力云图可知,运动海水以及发射活塞的巨大惯性力在发射过程的后期会使液缸内的油压迅速升高,因此关于环形活塞的缓冲设计还需要进一步进行探讨。
④通过流场仿真结果可知,鱼雷出管时间为0.67s(见图10),鱼雷出管速度为14.8m/s(见图11),管内运动最大加速度约为6g(见图12)。在图10~图13中还将流场仿真获得的鱼雷位移、速度、加速度及膛压结果与数学模型的内弹道计算结果进行比较,从结果曲线来看,两者的仿真结果略有偏差,但所反映的参数变化规律基本一致。这说明发射装置发射过程流场计算模型与内弹道数学模型能够在一定程度上较好地模拟发射过程,验证了模型的正确性。
4 结论
在外置蓄能式发射装置发射方案的基础上,采用一维数值与流场联合仿真的方法对发射系统内部二维轴对称瞬态流场进行了数值研究。通过数值求解,得到了发射系统内部压力特性、鱼雷与活塞的动力学特性、水缸与发射管壁面流体压力特性以及瞬态流场的特性。从发射过程仿真及流场仿真的结果对比来看,2种方法得到的结果反映的内弹道参数变化规律基本一致,在一定程度上检验了模型的正确性,为下一步的发射系统结构参数优化及技术设计提供了理论基础。
[1]练永庆,王树宗.鱼雷发射装置设计原理[M].北京:国防工业出版社,2012:65-66.LIAN Yong-qing,WANG Shu-zong.Torpedo launcher design principle[M].Beijing:National Defense Industry Press,2012:65-66.(in Chinese)
[2]郭关柱,王云.试论水下鱼雷发射装置研究方向[J].舰船科学技术,2003,25(3):21-23.GUO Guan-zhu,WANG Yun.Treatise on research orientation of underwater torpedo launching apparatus[J].Ship Science and Technology,2003,25(3):21-23.(in Chinese)
[3]田兵,练永庆,王树宗.外置式水下蓄能发射装置内弹道研究[J].弹道学报,2011,23(1):18-21.TIAN Bing,LIAN Yong-qing,WANG Shu-zong.Research on interior ballistic characteristic of outer underwater energy accumulated launcher[J].Journal of Ballistics,2011,23(1):18-21.(in Chinese)
[4]田兵,王树宗,练永庆.水下蓄能式发射装置结构优化[J].兵工学报,2011,32(9):1 094-1 098.TIAN Bing,WANG Shu-zong,LIAN Yong-qing.Structure optimization of underwater energy-accumulated launcher[J].Acta Armamentarii,2011,32(9):1 094-1 098.(in Chinese)
[5]张孝芳,王树宗,练永庆.气动水压式水下武器发射系统建模与仿真[J].系统仿真学报,2009,21(10):3 092-3 095.ZHANG Xiao-fang,WANG Shu-zong,LIAN Yong-qin.Modeling and simulation of pneumatic and hydraulic underwater weapon launching system[J].Journal of System Simulation,2009,21(10):3 092-3 095.(in Chinese)
[6]乔汝椿.蓄能式潜艇电动鱼雷发射装置方案设想[J].鱼雷技术,2003,11(2):43-45.QIAO Ru-chun.Tentative plan of submarine electric torpedo launcher in energy accumulator mode[J].Torpedo Technology,2003,11(2):43-45.(in Chinese)
[7]朱红钧.Fluent15.0流场分析实战指南[M].北京:人民邮电出版社,2015:333-335.ZHU Hong-jun.The practical guide of the Fluent15.0[M].Beijing:Post and Telecom Press,2015:333-335.(in Chinese)
[8]蔡荣泉.船舶计算流体力学的发展与应用[J].船舶,2002,8(4):8-13.CAI Rong-quan.Development and application of computational fluid dynamics[J].Ship and Boat,2002,8(4):8-13.(in Chinese)
猜你喜欢
水下无人系统学报(2024年1期)2024-03-14 03:42:52
数字海洋与水下攻防(2021年5期)2021-11-04 06:06:14
科技视界(2020年15期)2020-08-04 16:20:35
文苑(2019年24期)2020-01-06 12:06:32
装备环境工程(2019年7期)2019-08-21 01:51:10
今日农业(2019年12期)2019-08-13 00:50:18
小猕猴学习画刊(2018年11期)2018-11-30 02:33:08
数字海洋与水下攻防(2018年2期)2018-11-08 01:01:44
快乐语文(2016年12期)2016-11-07 09:45:39
现代防御技术(2016年1期)2016-06-01 12:13:27