强跟踪UKF粒子滤波算法
2015-12-20 06:58:58杨丽华李保林黄海波
计算机工程与设计 2015年9期
杨丽华,葛 磊,李保林+,黄海波
(1.湖北汽车工业学院 经济管理学院,湖北 十堰442002;2.中国航天科工集团第二研究院706所,北京100854;3.湖北汽车工业学院电气与信息工程学院,湖北 十堰442002)
0 引 言
就粒 子 滤 波 (particle filtering,PF)[1-7]本 身 而 言,其存在着缺点,主要为粒子退化问题,尽管通过重采样可以在一定程度上缓解粒子退化,但也由此产生了样本贫化。因此,众多学者通过研究选取重要性密度函数来缓解粒子退化问题,其中较为有效的是基于扩展卡尔曼滤波 (extended kalman filter,EKF)的 扩 展 粒 子 滤 波 (extended particle filter,EPF)和基于无迹卡尔曼滤波 (unscented Kalman filter,UKF)的无迹粒子滤波 (unscented particle filter,UPF)[8]。然而EPF和UPF虽然在一定程度上可以缓解粒子退化问题,但是由于EKF 和UKF 本身的局限,使两种算法对系统模型误差和状态突变的鲁棒性不强,当系统存在模型误差或状态突变时,滤波估计效果不佳,甚至发散。
为了提高PF对系统模型误差和状态突变的鲁棒性,提高滤波器对状态估计的跟踪能力,胡昌华等提出了强跟踪EPF (strong tracking EPF,STEPF)算法[9],该算法将强跟踪EKF (strong tracking EKF,STEKF)与PF结合,利用STEKF对粒子进行估计,产生重要性密度函数,并更新粒子。由于STEKF对状态具有较强的跟踪能力,鲁棒性较强,故STEPF既避免了粒子退化和样本贫化,又具有高于STEKF的估计精度,同时对系统状态突变具有较强鲁棒性。然而STEKF是基于一阶线性化截断的方法,其估计精度不高,从而影响了STEPF 的估计精度,并且由于STEKF需要计算非线性函数的雅可比矩阵,计算繁琐,容易出错,难以模块化实现,从而影响了STEPF的数值稳定性,也增加了在实际应用中的实现难度。
本文基于STEPF引入STEKF产生重要性密度函数的思 想,提 出 了 将 强 跟 踪 UKF (strong tracking UKF,STUKF)与PF结合的强跟踪UPF (strong tracking UPF,STUPF)算法,该算法利用STUKF产生重要性密度函数,并更新粒子。由于在非线性高斯系统下,UKF估计精度可达非线性函数的三阶泰勒展开,远远高于EKF的一阶,所以STUPF的估计精度高于STEPF,同时STUKF 不必求取计算繁琐的雅可比矩阵,故STUPF具有较高的数值稳定性,也较容易实现。
1 STEPF算法
1.1 STEKF算法
考虑如下所示的非线性离散系统

其中:xk∈Rn、yk∈Rm分别为系统状态向量和量测向量;fk(·):Rn→Rn、hk(·):Rn→Rm分别为系统非线性函数和量测函数;wk、vk为互不相关的高斯白噪声,具有如下的统计特性

其中:Qk、Rk都为正定矩阵;δk,j为Kronecker-δ函数。
则STEKF算法的实现步骤如下

其中
STEKF对模型误差和状态突变具有良好的鲁棒性,能以较快的速度跟踪状态变化,具有较强的实用性。
1.2 STEPF算法
STEKF虽然具有良好的鲁棒性,但是由于STEKF 算法本身的局限,其估计精度不高,只能达到泰勒展开的一阶精度,在某些情况下难以满足对状态估计的高精度要求。而将STEKF 与PF 结合的STEPF,则可以在保证STEKF的鲁棒性的同时,提高滤波精度。STEPF 算法的实现步骤如下:
步骤2 已知k+1时刻的量测值yk+1,利用STEKF算法对每个粒子进行更新,得到粒子的重要性密度函数,并根据重要性密度函数抽样, 获得相应粒子{xik+1i=1,2,…,N}及其概率密度值

步骤3 更新权值并归一化

步骤4 对粒子样本{xik+1i=1,2,…,N}重采样得到新粒子样本{xik+1i=1,2,…,N},并求取状态估计
相比于STEKF,STEPF 具有较高的估计精度,同时也克服了粒子退化和样本贫化的问题,并对系统模型误差和状态突变具有较强的鲁棒性,对状态具有较强的跟踪能力。但是由于STEKF的估计精度较低,而STEPF 的粒子更新过程是根据STEKF产生的重要性密度函数,所以也直接影响了STEPF的估计精度,同时由于STEKF需要计算雅可比矩阵,计算较为繁琐,且容易出错,这也影响了STEPF的数值稳定性。同时由于雅可比矩阵的计算难以模块化实现,导致STEPF也存在难以模块化的问题。
因此,寻找一种鲁棒性较强、估计精度更高、可以模块化实现的滤波算法,替代STEKF产生重要性密度函数,成为提高STEPF估计精度、实现方便的关键。而STUKF恰恰满足这些要求,将STUKF与PF结合的STUPF算法,可得到比STEPF估计精度更高,更容易实现的滤波算法。
2 STUPF算法
2.1 STUKF算法
基于非线性系统式 (1)和式 (2)的STUKF 算法可表示如下[10]:
步骤1 已知k 时刻的状态xk的统计特性(^xk,Pk),根据Sigma采样策略,确定Sigma点ξi,k(i=0,1,…,L)及其相应权值。
步骤2 计算ξi,k 经非线性函数(1)传播后的点γi,k+1/k,从而得到一步状态预测及误差协方差阵P(l)k+1/k

步骤5 求得λk+1后,利用^xk+1/k和Pk+1/k求 取Sigma点,再 通 过 非 线 性 测 量 函 数 (2)传 播 后 的 点ηi,k+1/k,由可得引入 渐 消 因 子 后 的 自 协 方 差Pyk+1和互协方差Pxk+1yk+1

步骤6 在获得新的量测后yk+1,即可求得滤波增益Kk+1、状态估计值和协方差Pk+1

由于STUKF算法同样采用了U 变换,故当系统正常时,STUKF与UKF具有相同的估计精度,但是当系统具有模型误差或状态突变时,UKF的滤波增益不会自适应调整,导致状态估计不准确,严重时滤波会发散。而STUKF是基于正交性原理推导出来,通过以强迫输出残差序列正交的方法,自适应的调整滤波增益,所以STUKF 对系统模型误差和状态突变具有良好的鲁棒性,即使当滤波趋于稳定时,STUKF也会通过因状态异常而导致的量测异常,自适应地调整一步预测方差阵,从而达到调整滤波增益、跟踪真实状态的目的。
同时由于STUKF采用逼近精度更高的U 变换来近似状态的后验均值和协方差,所以与STEKF 相比,STUKF克服了STEKF通过一阶线性化截断导致精度偏低的缺点,又避免了计算雅可比矩阵,能提高滤波的数值稳定性,且有利于算法的模块化设计。
2.2 STUPF算法
STUPF算法的设计思想是,利用最新的观测数据,通过STUKF计算粒子重要性密度函数的均值和协方差,并根据重要性密度函数统计特性采样得到新的粒子及相应权值,再通过粒子权值的归一化和对粒子的重采样,再加权求和,完成对状态的估计。其具体实现步骤如下:
步骤1 初始化,设置粒子数目N ,并对N(^x0,P0)抽样,得到初始粒子集{i=1,2,…,N},并设粒子的权值皆为1/N。
步骤2 在获得k+1 时刻的量测值yk+1后,利用STUKF对每个粒子进行状态估计,得到相应估计值和 协方差Pik+1/k,并以此作为 粒 子 的 重 要 性 密 度 函 数进行抽样,从而得到新粒子及其概率密度值

步骤3 将粒子权值进行更新,并进行归一化处理

由于STUPF采用STUKF产生重要性密度函数,所以在一定程度上克服了粒子退化和样本贫化的问题,当系统正常时,由于UKF 与STUKF 具有相同的估计精度,故STUPF与UPF也具有相同的估计精度,所以STUPF算法兼具UPF的估计精度高和STUKF对状态突变的强跟踪能力,具有较强的适应性,即使当系统模型失配或发生状态突变时,也可以迅速跟踪状态真实值,完成对状态的估计。同时由于STUKF满足正交性原理,其估计结果是无偏的,而STUPF算法不影响其正交性,故STUPF可以保证估计值的无偏和次优。
与STEPF相比,由于STUKF 估计精度高于STEKF,所以由STUKF对粒子的更新更加集中于状态概率密度函数的高似然区域,故STUPF 的估计值更加精确。同时由于STUKF避免了求取雅可比矩阵,降低了计算复杂度,故增加了STUPF算法的可实现性和数值稳定性,且容易模块化实现。
3 数值仿真
本节分别采用两个非线性模型对STUPF进行仿真,其中例1是粒子滤波算法的标准检验模型,来验证STUPF算法对状态的估计能力,例2 是分时恒定值问题,来验证STUPF对状态突变的强跟踪能力。
例1:标准模型的状态方程和量测方程为
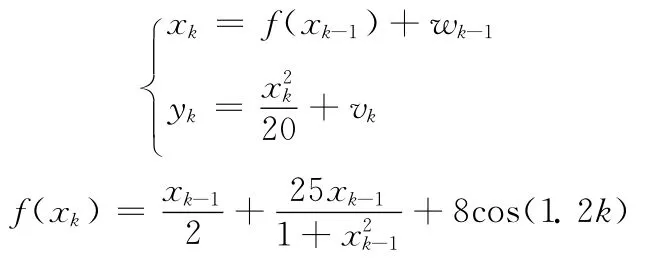
其中,wk和vk分别为均值为0,方差分别为Qk=10,Rk=1的高斯白噪声。设x0=0.1,P0=10,ρ=0.95,取粒子数为100,进行100步的迭代估计,分别用UPF、STEPF 和STUPF算法对该模型进行滤波,所得的状态估计曲线和均方误差曲线分别如图1和图2所示。
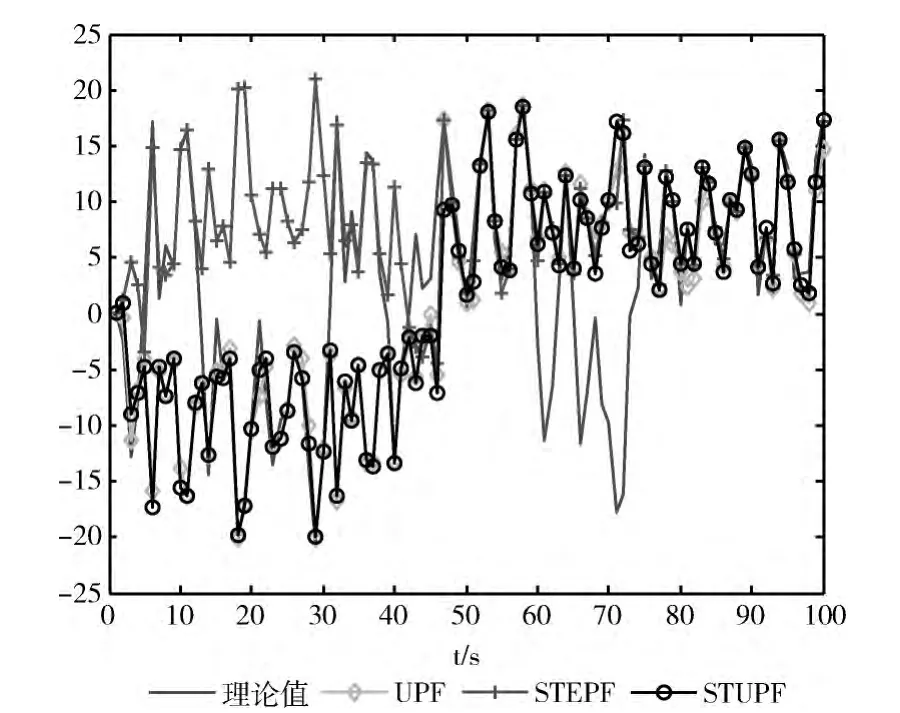
图1 标准模型的状态估计
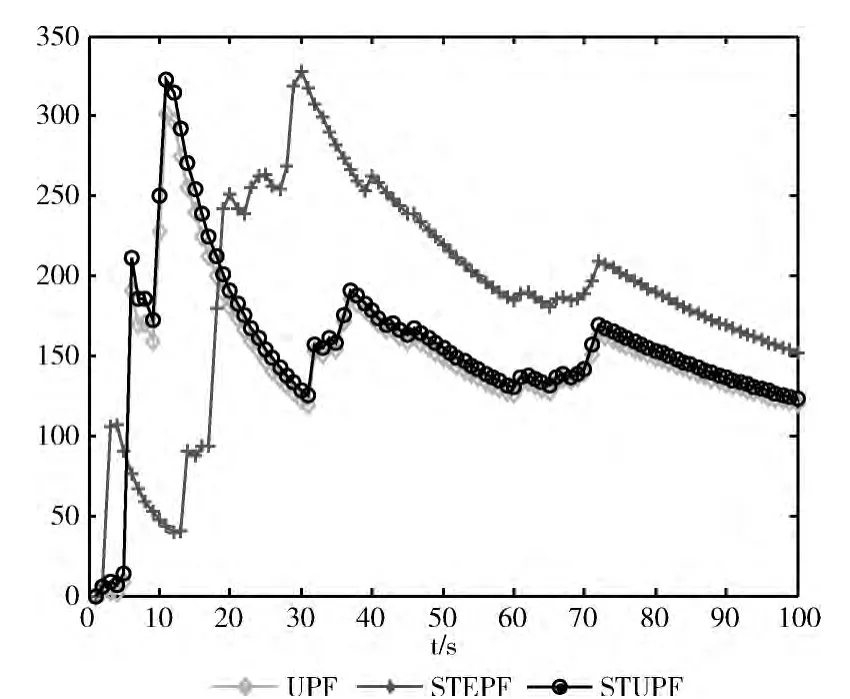
图2 标准模型的均方误差
从图1和图2 可以看到,UPF、STEPF 和STUPF 都能对该模型进行估计,其中UPF和STUPF估计效果较好,且精度相当,而STEPF 的均方误差曲线大于UPF 和STUPF,估计精度稍差。UPF 和STUPF 估计精度相当的原因是两种算法的重要性密度函数UKF 和STUKF,当系统没有模型误差或状态突变时,具有相同的估计精度。而STEPF估计精度稍差的原因是采用估计精度低于UKF 和STUKF的STEKF作为重要性密度函数。这也验证了当系统正常时,STUPF和UPF 估计精度相同,且高于STEPF的理论分析。
例2:分时恒定值的状态方程和量测方程为
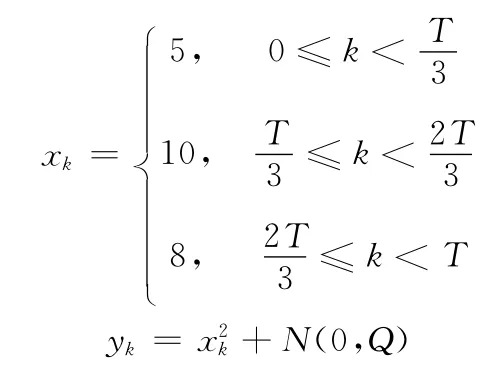
设T =120,Q =1,P0=5,ρ=0.95,粒子滤波的样本个数为100,进行120 步的滤波计算。分别用UPF、STEPF和STUPF算法对该系统进行滤波,所得的滤波曲线如图3所示。
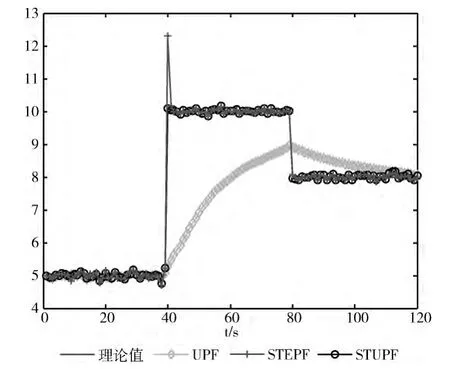
图3 分时恒定值的状态估计
从图3可以看到,UPF对状态突变完全失去了跟踪能力,其估计值难以跟踪状态真实值,产生较大误差,鲁棒性较差。而STEPF和STUPF对状态突变都具有较强的跟踪能力,都可以在状态突变后迅速跟踪到真实状态,并且估计精度都很高。但是,由于STEPF采用STEKF 作为重要性密度函数,而STEKF的估计精度不高,所以导致在对状态突变时刻进行估计时,STEPF的估计值与真实值的误差较大,行成一个尖刺,影响了状态估计的平滑性,而STUPF则由于估计精度高,避免了这一缺陷,从而验证了STUPF具有较高的估计精度和对状态突变较强的跟踪能力。
4 结束语
STEPF算法对系统模型误差和状态突变具有较强的鲁棒性,但是由于STEPF 以STEKF 作为重要性密度函数,导致其估计精度受到影响,且需要计算雅可比矩阵,增加了实现难度,影响了数值稳定性。本文提出的STUPF算法使用估计精度更高的STUKF 作为重要性密度函数,兼具了UPF估计精度高和STUKF 较强鲁棒性的优点,有效克服了STEPF 所存在的缺点。数值仿真结果表明,STUPF在具有较强的鲁棒性的同时,具有高于STEPF 的估计精度。
[1]YAO Anbang.A compact association of particle filtering and kernel based object tracking [J].Pattern Recognition,2012,45 (7):2584-2597.
[2]YUAN Chen.Particle filtering for blind equalization with unknown noise variance [J].Advanced Materials Research,2012,462:10-16.
[3]Orguner U,Gustafsson F.Target tracking with particle filters under signal propagation delays [J].IEEE Transactions on Signal Processing,2011,59 (6):2485-2495.
[4]Closas P,Femandez-Prades C.Bayesian nonlinear filters for direct position estimation [C]//IEEE Aerospace Coference,2010:1-12.
[5]ZHANG Miaohui,LIU Xiansheng.Target tracking algorithm based on MCMC unscented particle filter [J].Systems Engineering and Electronics,2009,31 (8):1810-1813 (in Chinese).[张苗辉,刘先省.基于MCMC 无味粒子滤波的目标跟踪 算 法 [J].系 统 工 程 与 电 子 技 术,2009,31 (8):1810-1813.]
[6]SUN F,TANG LJ.Improved particle filter algorithm for INS/GPS integrated navigation system [C]//IEEE International Conference on Mechatronics and Automation, 2011:2392-2396.
[7]Hai H Hoang,Bing W Kwan.Suboptimal particle filtering for MIMO flat fading channel estimation [J].International Journal of Communication Systems,2013,26 (3):356-368.
[8]Seok-Han Lee.Real-time camera tracking using aparticle filter combined with unscented kalman filters [J].Journal of Electronic Imaging,2014,23 (1):1-18.
[9]HU Changhua,ZHANG Qi,QIAO Yukun.A strong tracking particle filter with application to fault prediction [J].Acta Automatica Sinica,2008,34 (12):1522-1528 (in Chinese).[胡昌华,张琪,乔玉坤.强跟踪粒子滤波算法及其在故障预报中的应用 [J].自动化学报,2008,34 (12):1522-1528.]
[10]WANG Xiaoxu,ZHAO Lin,XIA Quanxi,et al.Strong tracking filter based on Unscented transformation [J].Control and Decision,2010,25 (7):1063-1068 (in Chinese).[王小旭,赵琳,夏全喜,等.基于Unscented变换的强跟踪滤波器 [J].控制与决策,2010,25 (7):1063-1068.]
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
测控技术(2018年10期)2018-11-25 09:35:54
浙江工业大学学报(2017年5期)2018-01-22 02:03:46
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电子设计工程(2014年20期)2014-02-27 12:01:00
物理与工程(2014年4期)2014-02-27 11:23:08