
主动前轮转向车辆操纵稳定性的仿真分析
2015-12-14 07:09:12杨舒涵王春燕赵万忠
重庆理工大学学报(自然科学) 2015年1期
杨舒涵,王春燕,赵万忠
(南京航空航天大学车辆工程系,南京 210016)
主动前轮转向系统能在驾驶员输入转向角的基础上叠加附加转向角,对车辆施加独立的转向干预,优化车辆对于驾驶员输入的响应,提高车辆稳定性。该系统解决了汽车低速转向轻便与高速转向稳重的矛盾,实现了驾驶员路感和汽车主动安全性的完美结合,是当前转向系统发展的一个主要趋势。
目前,国内外对主动前轮转向系统的研究主要集中在转向原理和控制策略等方面,而利用虚拟样机技术对主动前轮转向进行建模和仿真的研究还很少。若建立装有主动前轮转向系统的整车模型,并通过软件进行虚拟试验,分析和评估主动前轮转向系统的性能,将有利于对主动前轮转向系统进行深入研究。
本文首先建立主动前轮转向系统模型以及带主动前轮转向系统的整车模型;在此基础上,针对不同路面附着系数考虑有无主动转向、有无主动转向干预的情况,对整车进行不同车速以及不同方向盘转角输入时的性能仿真分析。本文的研究结果可以为主动前轮转向系统的设计与开发提供一定的理论参考。
1 整车多体动力学建模
本文采用ADAMS/CAR建立前轮主动转向车辆多体动力学模型,建模过程如图1所示。
1.1 主动前轮转向系统模型
主动前轮转向系统模型建立在ADAMS/CAR原有机械式齿轮齿条式转向系统模型的基础上,保留齿轮齿条转向系统中的部分机械零件,包括方向盘、转向柱、齿轮齿条转向机构,另外在转向盘和齿轮齿条转向机之间的转向柱上增加一套用于实现主动前轮转向功能的双行星齿轮机构。
1.2 整车模型
在建立整车模型时采取以下的简化原则:簧载质量视为一个具有6自由度的刚体;在仿真分析的过程中不考虑零部件的变形;各个零部件之间采用橡胶衬套连接,并对橡胶衬套连接做适当的简化;忽略各个运动副间的摩擦力;对于动力总成和制动系,采用 ADAMS/CAR内置数据库中的动力总成和制动系模块直接建模,不建立发动机模型,仅考虑传动半轴以后的动力传递。
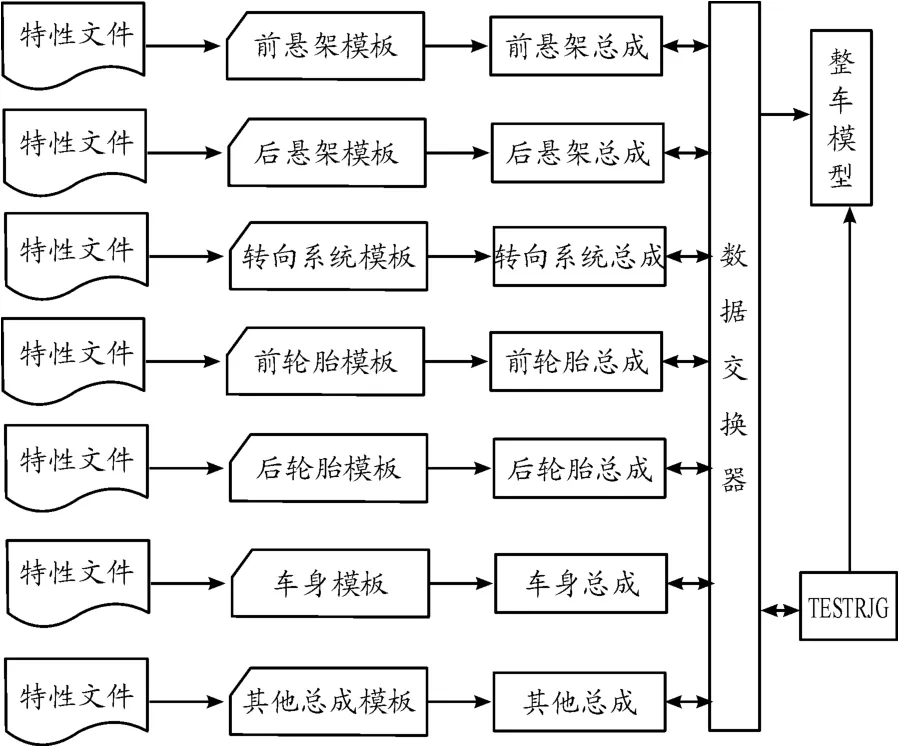
图1 前轮主动转向车辆多体动力学模型建模过程
1.2.1 前悬架模型
前悬架采用双横臂式独立悬架。前悬架参数设置为:满载轴荷为900 kg;前轮轮距为1 600 mm;前轮外倾角为-0.9°;主销内倾角为5.2°;主销后倾角为4.9°;前轮前束角为0°。
1.2.2 后悬架模型
后悬架也采用双摆臂式独立悬架,其结构与前悬架相似,但增加了左、右驱动半轴2个刚体。后悬架参数设置为:满载轴荷为900 kg;后轮轮距为1 550 mm;后轮外倾角为-1.5°;后轮前束角为0°。
1.2.3 动力系统模型
采用ADAMS/CAR中通用的动力系统总成模块。设置发动机参数为:最低转速为600 r/min;怠速转速为800 r/min;最高转速为5 500 r/min。
设置变速器为5挡变速器,各挡的传动比设置为:Ⅰ挡传动比i1=3.6;Ⅱ挡传动比i2=2.125;Ⅲ挡传动比i3=1.458;Ⅳ挡传动比i4=1.071;Ⅴ挡传动比i5=0.857;倒挡传动比iR=3.5。
1.2.4 制动系统模型
制动系统前后均采用盘式制动。在仿真时,需要根据制动踏板的行程、制动油泵的工作状况以及制动器结构参数计算得出制动器产生的制动转矩。
1.2.5 轮胎模型
Pacejka’89轮胎模型是ADAMS中3种使用魔术公式的轮胎模型之一,可以反映较多的轮胎状态信息,通用性强。本文建立Pacejka’89轮胎模型。
将上述各子系统进行装配后得到带有主动前轮转向系统的整车模型。
2 主动前轮转向车辆性能分析
在不同路面附着系数下考虑汽车有无主动转向、有无主动转向干预的情况,对整车模型在不同车速以及不同方向盘转角输入下进行阶跃输入及单移线仿真分析。
2.1 有无主动转向系统仿真分析
设定路面附着系数μ分别为0.8和0.3,在车速v分别为30 km/h和130 km/h时进行方向盘输入幅值θ为20°和120°、起跃时间为0.2 s的阶跃输入仿真。
1)在车速v=30 km/h,方向盘输入幅值θ=20°,路面附着系数μ=0.8时,仿真结果如图2~4所示。

图2 横摆角速度对比(v=30 km/h,θ=20°,μ=0.8)
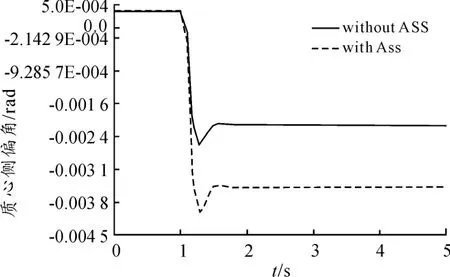
图3 质心侧偏角对比(v=30 km/h,θ=20°,μ=0.8)

图4 方向盘转矩对比(v=30 km/h,θ=20°,μ=0.8)
由图2~4可以看出:在高附着系数路面下,以低速小转角转向时,主动转向汽车比一般汽车具有更大的横摆角速度和质心侧偏角,即主动转向汽车在低速行驶中转向时比一般汽车更灵活,具有更高的机动性,但主动转向汽车所需的方向盘转矩也较大。
2)在车速v=130 km/h,方向盘输入幅值θ=20°,路面附着系数μ=0.8时,仿真结果如图5~7所示。
由图5~7可以看出:在高附着系数路面下,以高速小转角转向时,主动转向汽车比一般汽车具有明显较小的横摆角速度、质心侧偏角以及方向盘转矩,主动转向汽车在这种情况下具有更好的操纵稳定性。
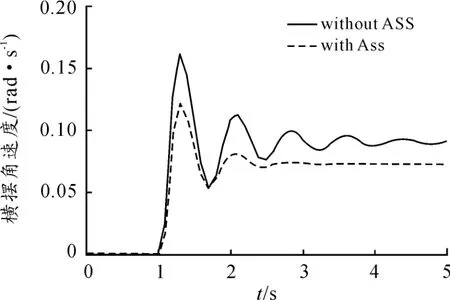
图5 横摆角速度对比(v=130 km/h,θ=20°,μ=0.8)
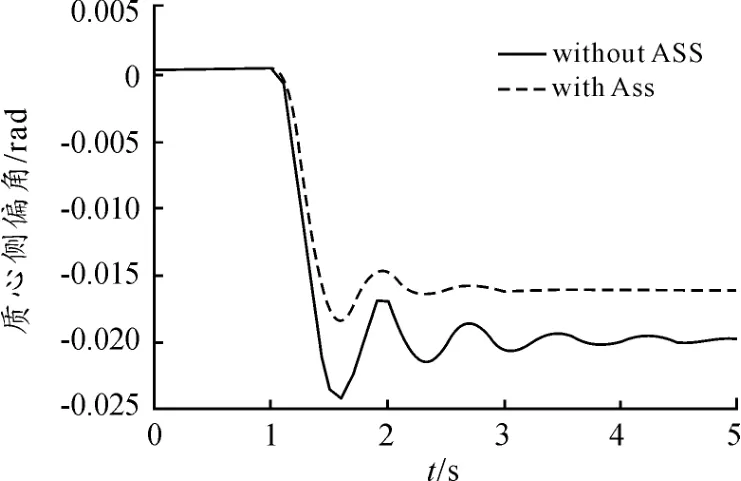
图6 质心侧偏角对比(v=130 km/h,θ=20°,μ=0.8)
3)在车速v=30 km/h,方向盘输入幅值θ=120°,路面附着系数μ=0.8时,仿真结果如图8~10所示。
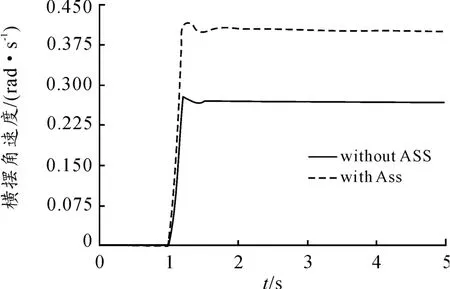
图8 横摆角速度对比(v=30 km/h,θ=120°,μ=0.8)
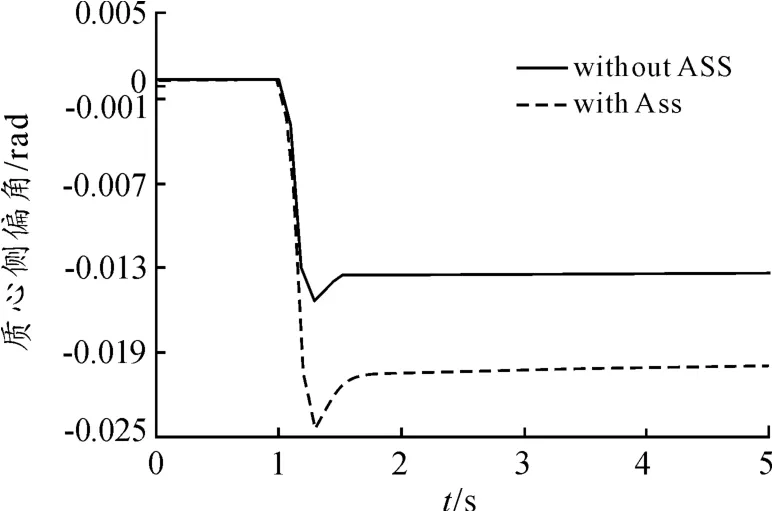
图9 质心侧偏角对比(v=30 km/h,θ=120°,μ=0.8)
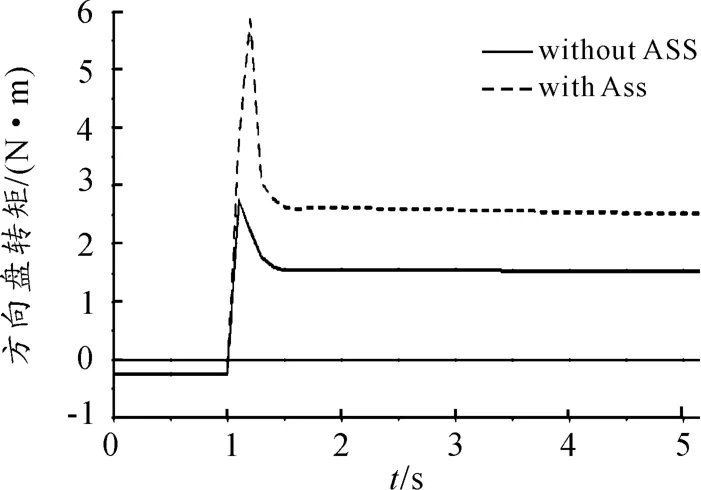
图10 方向盘转矩对比(v=30 km/h,θ=120°,μ=0.8)
由图8~10可以看出:在高附着系数路面下,以低速大转角转向时,主动转向汽车比一般汽车具有明显较大的横摆角速度、质心侧偏角以及方向盘转矩,主动转向汽车在这种情况下具有更好的机动性、灵敏性。
4)在车速v=130 km/h,方向盘输入幅值θ=120°,路面附着系数μ=0.8时,仿真结果如图11~13所示。
由图11~13可以看出:在高附着系数路面下,以高速大转角转向时,汽车出现失稳甩尾现象,主动转向汽车比一般汽车具有较小的横摆角速度、质心侧偏角以及方向盘转矩。
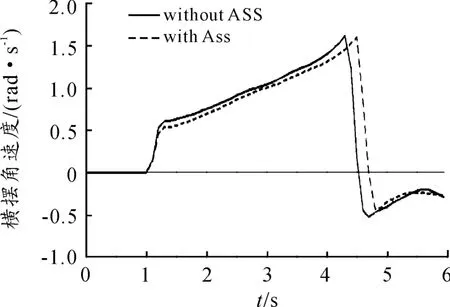
图11 横摆角速度对比(v=130 km/h,θ=120°,μ=0.8)
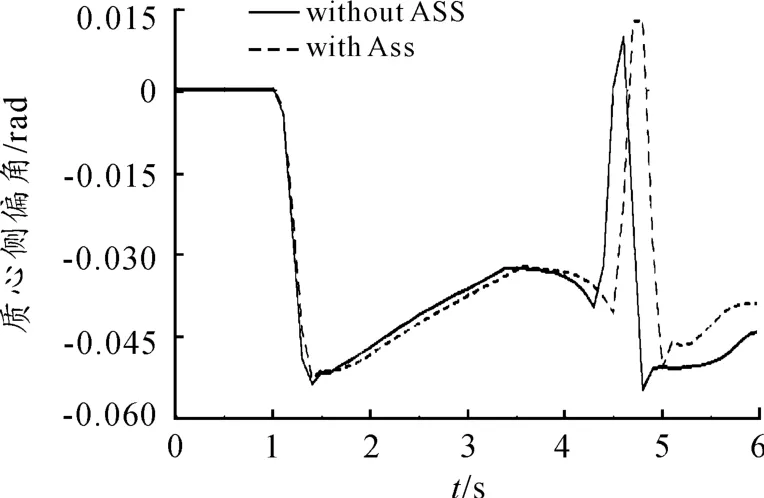
图12 质心侧偏角对比(v=130 km/h,θ=120°,μ=0.8)
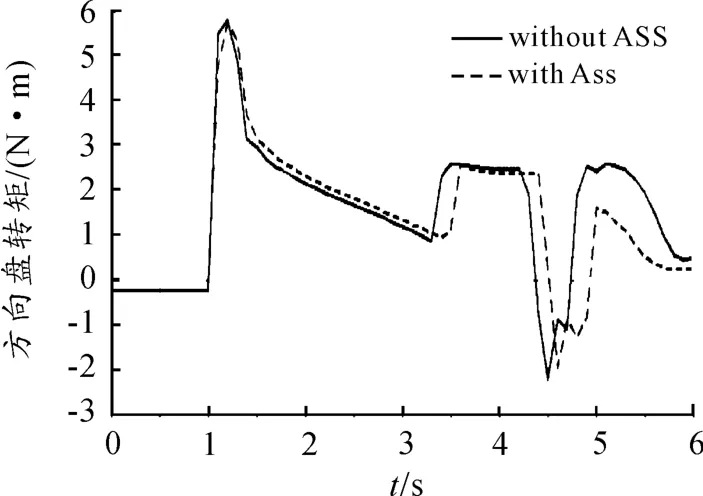
图13 方向盘转矩对比(v=130 km/h,θ=120°,μ=0.8)
5)在车速v=30 km/h,方向盘输入幅值θ=20°,路面附着系数μ=0.3时,仿真结果如图14~16所示。
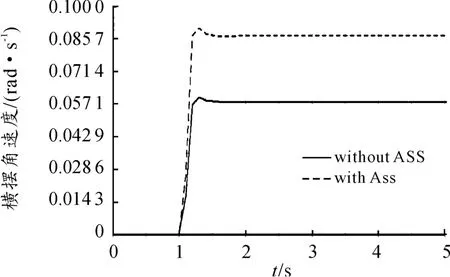
图14 横摆角速度对比(v=30 km/h,θ=20°,μ=0.3)

图15 质心侧偏角对比(v=30 km/h,θ=20°,μ=0.3)
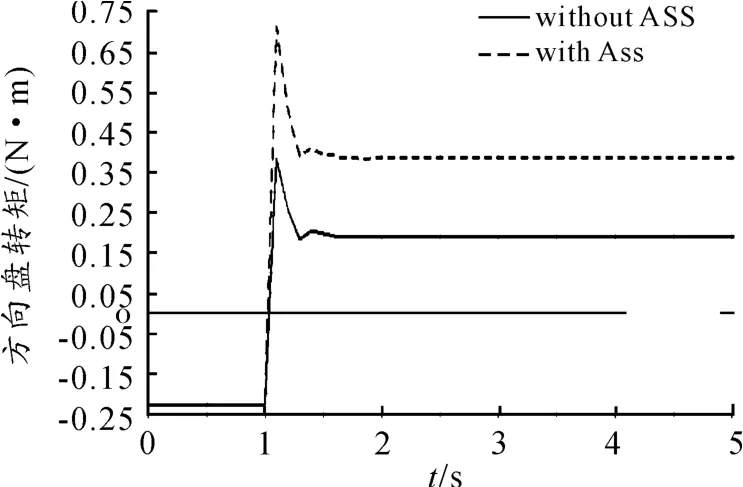
图16 方向盘转矩对比(v=30 km/h,θ=20°,μ=0.3)
由图14~16可以看出:在低附着系数路面下,以低速小转角转向时,主动转向汽车比一般汽车具有明显较大的横摆角速度、质心侧偏角以及方向盘转矩,主动转向汽车在这种情况下具有更好的机动性和灵敏性。
6)在车速v=80 km/h,方向盘输入幅值θ=20°,路面附着系数μ=0.3时,仿真结果如图17~19所示。
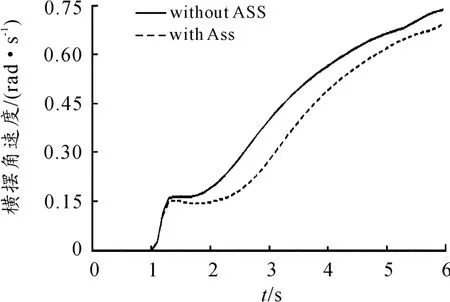
图17 横摆角速度对比(v=80 km/h,θ=20°,μ=0.3)
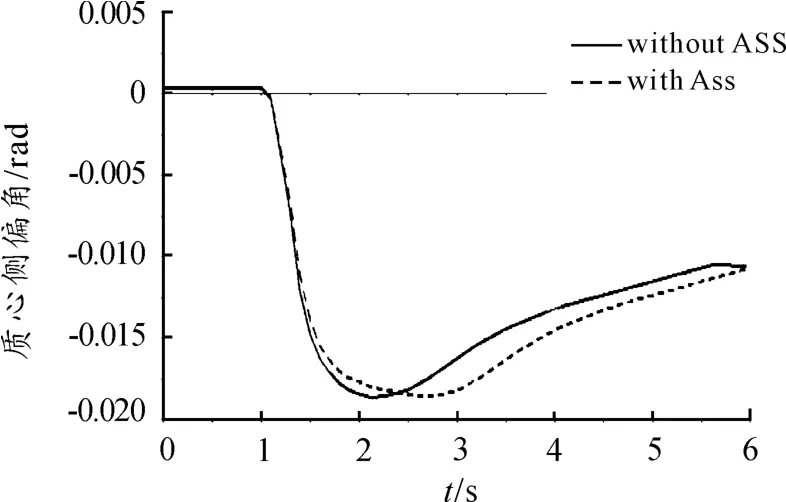
图18 质心侧偏角对比(v=80 km/h,θ=20°,μ=0.3)
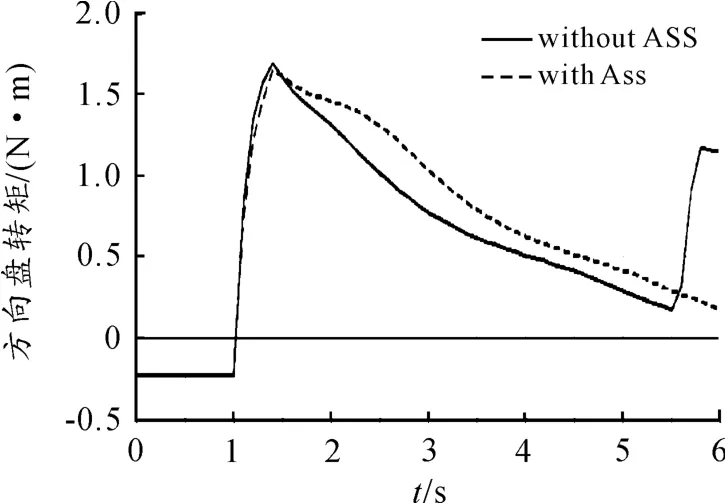
图19 方向盘转矩对比(v=80 km/h,θ=20°,μ=0.3)
由图17~19可以看出:在低附着系数路面下,以中速小转角转向时,汽车出现失稳甩尾现象,主动转向汽车比一般汽车具有较小的横摆角速度,而质心侧偏角以及方向盘转矩的大小相差不大。
7)在车速v=130 km/h,方向盘输入幅值θ=20°,路面附着系数μ=0.3时,仿真结果如图20~22所示。

图20 横摆角速度对比(v=130 km/h,θ=20°,μ=0.3)
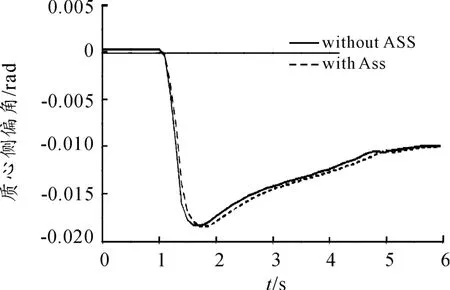
图21 质心侧偏角对比(v=130 km/h,θ=20°,μ=0.3)

图22 质心侧偏角对比(v=130 km/h,θ=20°,μ=0.3)
由图20~22可以看出:在低附着系数路面下,以高速小转角转向时,汽车出现失稳甩尾现象,主动转向汽车比一般汽车具有较小的横摆角速度,而质心侧偏角以及方向盘转矩的大小相差不大。
2.2 有无主动转向干预仿真分析
在考虑车辆是否具有主动转向干预的情况下对整车模型进行单移线仿真,对比分析车辆有主动转向干预与无主动转向干预情况下的性能差异。
设定路面附着系数μ=0.8,分别在车速为30 km/h和130 km/h时进行方向盘转角幅值为20°、周期为5 s的单移线仿真研究。
1)当车速为30 km/h时,仿真结果如图23~26所示。
由图23~26可以看出:在高附着系数路面下,以低速小转角变道行驶时,由于主动转向系统具有主动干预的特点,主动转向汽车的实际方向盘的转角比一般汽车的方向盘转角更大;同时,主动转向汽车的横摆角速度、质心侧偏角以及所需方向盘的转矩均比一般汽车的值更大,主动转向汽车在这种情况下变道更灵活、更迅速。
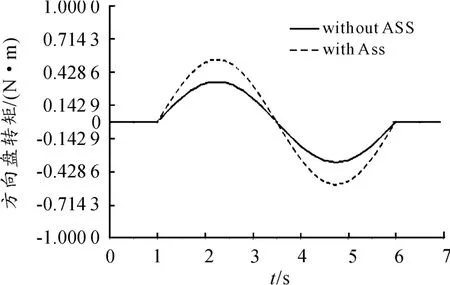
图23 方向盘转角对比(v=30 km/h)
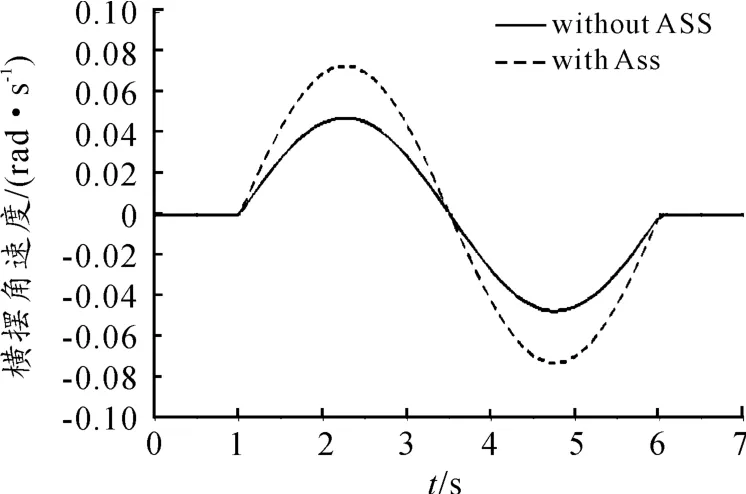
图24 横摆角速度对比(v=30 km/h)

图25 质心侧偏角对比(v=30 km/h)
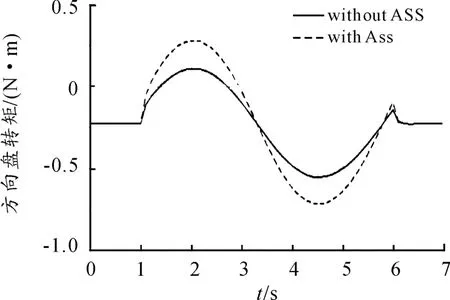
图26 方向盘转矩对比(v=30 km/h)
2)当车速为130 km/h时,仿真结果如图27~30所示。
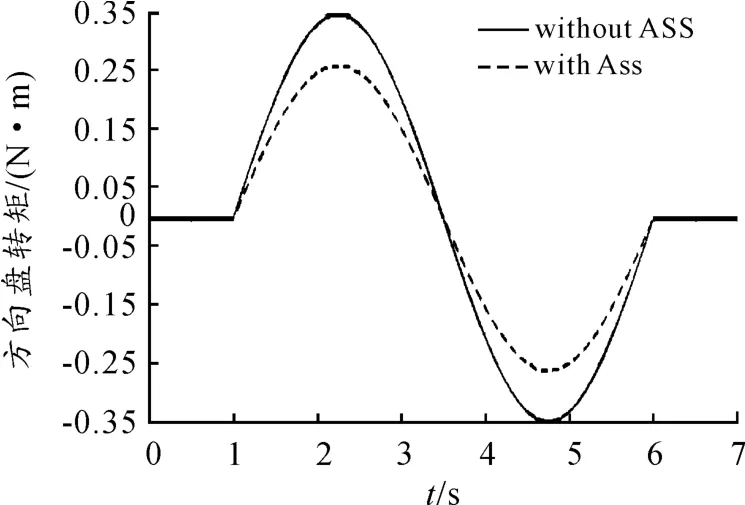
图27 方向盘转角对比(v=130 km/h)
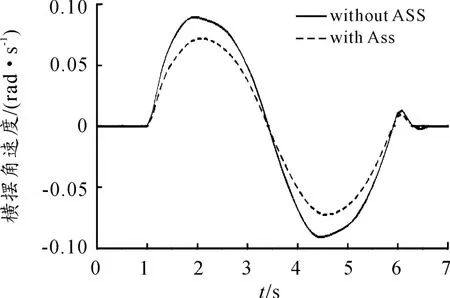
图28 横摆角速度对比(v=130 km/h)
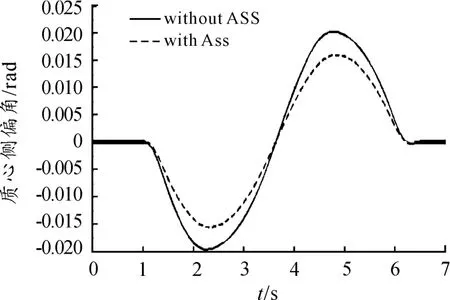
图29 质心侧偏角对比(v=130 km/h)

图30 方向盘转矩对比(v=130 km/h)
由图27~30可以看出:在高附着系数路面下,以高速小转角变道行驶时,由于主动转向系统具有主动干预的特点,主动转向汽车的实际方向盘的转角比一般汽车的方向盘转角更小;同时,主动转向汽车的横摆角速度、质心侧偏角以及所需方向盘的转矩均比一般汽车的值更小,主动转向汽车在这种情况下变道更稳定、更安全。
3 结束语
本文在建立主动前轮转向系统模型以及整车模型的基础上,针对不同路面附着系数,分别考虑汽车有无主动转向、有无主动转向干预的情况,对整车模型在不同车速以及不同方向盘转角输入下进行阶跃响应及单移线仿真分析。仿真结果表明:阶跃输入时,在不同路面附着系数及方向盘转角下,汽车低速转向时横摆角速度、质心侧偏角增大,转向更加灵敏;在高速时横摆角速度、质心侧偏角变小,转向更稳定、更安全;单移线运动时,在高路面附着系数以及小方向盘转角下,汽车在低速变道时因主动干预方向盘实际转角增大,变道更加灵敏、迅速,在高速变道时因主动干预方向盘实际转角变小,使变道更稳定、安全。
[1]李一染,陈慧,高博麟.自抗扰控制在前轮主动转向控制中的应用[J].汽车工程,2011,33(5):388-391.
[2]Wada N,Takahashi A,Saeki M,et al.Vehicle yaw control using an active front steering system with measurements of lateral tire forces[J].Journal of Robotics and Mechatronics,2011,23(1):83-93.
[3]张红党.汽车主动前轮转向系统的特性研究[D].镇江:江苏大学,2009.
[4]Zhang J,Kim J,Xuan D,et al.Design of active front steering(AFS)system with QFT control[J].International Journal of Computer Applications in Technology,2011,41(3-4):236-245.
[5]季鹏凯,沈斌,陈慧,等.主动转向系统鲁棒控制的研究[J].汽车工程,2013,35(12):1092-1098.
[6]黄炳华,陈祯福.汽车主动转向系统的特性研究[J].武汉理工大学学报,2008(6):421-422.
[7]Zhao Wanzhong,Sun Peikun,Liu Shun.Multi-objective optimization of active steering system with force and displacement coupled control[J].Journal of Central South University,2012,19(4):974-981.
[8]原健钟.汽车主动转向系统研究[D].广州:华南理工大学,2010.
[9]陈德玲,殷承良,张建武.基于参数不确定的主动前轮转向鲁棒性控制[J].上海交通大学学报,2008,42(8):56-61.
[10]Doumiati M,Sename O,Dugard L,et al.Integrated vehicle dynamics control via coordination of active front steering and rear braking[J].European Journal of Control,2013,19(2):121-143.
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:39:40
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
今日农业(2020年16期)2020-12-14 15:04:59
新课程·中学(2019年7期)2019-09-17 13:41:15
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
物理教学探讨(2018年1期)2018-02-13 09:26:52
传媒评论(2017年8期)2017-11-08 01:47:36
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
农机使用与维修(2014年11期)2014-11-18 01:32:07
汽车零部件(2014年5期)2014-11-11 12:24:30
