
基于PCA与BP神经网络的制动行为模型
2015-12-14 07:09:08刘志强张硕辉
重庆理工大学学报(自然科学) 2015年1期
刘志强,张硕辉,汪 澎
(江苏大学汽车与交通工程学院,江苏镇江 212013)
驾驶行为是汽车主动安全领域研究的重点课题。目前的研究主要集中在对驾驶行为的理论建模或对某一危险驾驶行为的检测和预警。文献[1]应用决策优化模型求解车辆轨迹最优目标和速度最优目标,并将跟车、换道、超车、穿插、制动等驾驶行为统一在驾驶行为决策优化模型中进行描述。文献[2]通过自行开发的专用照相机、脑电图仪和其他仪器来精确测量头部运动、瞳孔直径变化和眨眼频率,用以研究疲劳驾驶行为。文献[3]运用BP神经网络集成方法研究了驾驶员跟车模型,以前车速度为输入,通过2层结构神经网络模拟驾驶员对跟车加速度的控制。文献[4]针对部分传统车辆跟驰行为模型进行了综述,总结了各种跟驰模型的优缺点。文献[5]研究了不同交通信息(事故信息、驾驶员年龄、性别等)对换道行为的影响。文献[6]采用自适应侧向预瞄模型来对驾驶员转向行为进行建模。
本文通过在驾驶模拟仪上获得的10名驾驶员的多组跟车实验数据,采用主成分分析法确定4个相关的车辆状态参数来描述驾驶员制动行为,研究建立符合驾驶员跟车习惯的制动行为模型,并利用WEKA数据挖掘平台对模型进行训练学习,以期获得较好的模型效果。
1 基于主成分分析法的制动行为分析
1.1 实验数据的获取
影响驾驶行为的因素很多,不仅与驾驶员自身的身心状态和驾驶技术有关,还受天气以及周围交通环境的影响。要建立准确的制动行为模型就必须正确选取能使驾驶员感受危险的车辆状态参数。综合国内外相关文献,本实验所采集的数据为相对距离d、前车加速度a1、相对速度 Δv、碰撞时间的倒数TTCi、车头时距THW、自车速度v2、前车速度v1。
本文选用江苏大学模拟驾驶仪作为主要的实验设备,将一段实车道路实验获得的行车数据导入模拟驾驶仪中,将这段行车数据作为前导车的行车状态。受试者为8名男性和2名女性,驾龄在2~10年,实验前均先安排一定的时间熟悉驾驶仪的使用。在正式实验过程中,每个驾驶员的实验过程相同,以保证驾驶员间的可比性以及模型的适用性。要求驾驶员集中注意力,在遵守交通规则的情况下驾车跟随前车直至感觉到有潜在的追尾危险后采取减速措施。图1是4号驾驶员在某一次实验5~51 s时的部分操作数据。
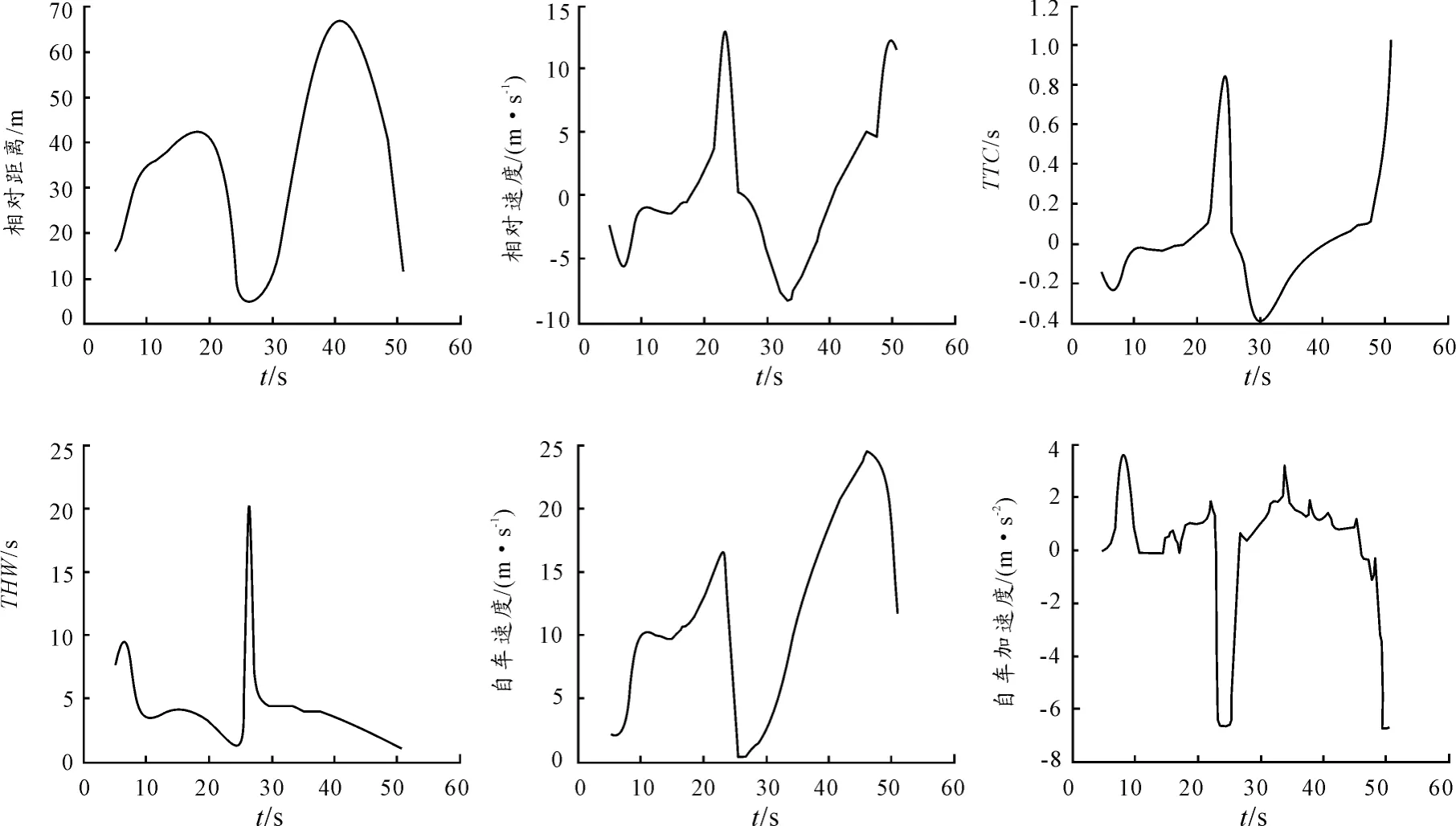
图1 驾驶员在某次实验5~51 s时的部分操作数据
1.2 实验数据处理
THW和TTCi两个参数都是基于车辆相对运动状态定义的,需要通过采集的参数计算得到。

避撞时间TTC及其倒数TTCi(time to collision in-verse)的定义为:

TTC的量纲也为s,该参数表征了自车在当前状态下与前车追尾所需要的时间。
1.3 主成分分析法
主成分分析法(principle components analysis,PCA)是将多个变量通过线性组合选出较少个数的重要变量集合来描述相关结构的一种统计分析方法[7-8]。首先对初始主成分参数 X1,X2,…,X7(参数从1到7依次为相对距离d、前车加速度a1、相对速度 Δv、碰撞时间的倒数 TTCi、车头时距THW、自车速度v2、前车速度v1)进行标准化处理,用Zi表示经过标准化的变量。

Xi与Xj之间的协方差为

相关系数为

采用Ranker搜索法求得7个参数的相关系数矩阵R,如表1所示。
通过求解特征方程λE-R=0的特征值,第i主成分Xi的特征值λi即为该主成分的方差。主成分Xi的方差对总方差的贡献率为
贡献率wi反映了第i个主成分承载原始变量信息的百分比。第1主成分方差贡献率最大,随后逐次递减。为达到降维的目的,如果前m个主成分的累积贡献率达到90%,则可取前m个主成分代替所有成分。
在变电站日常的巡检工作中,对于目标不同方位和层次的观察是通过运维人员的眼睛来实现的,而对于不同角度的观察由走动来实现的,但是现场的摄像机获取的图像具有平面性、单一性,进而失去了立体感。[3]怎样使变电站运维工作中的摄像机的捕捉的画面具有立体感,带来更真实的视觉运维,是我们在变电站智能巡检运维中要面临的首要问题。通过对Hou方法的研究,实现了对摄像机采集的平面图像立体化,使不同摄像机的画面组合,模拟人眼在现场观察目标,可以确保了远程智能巡检的质量和效果。
相关矩阵R的贡献率前4位的特征值、贡献率、累积贡献率见表2。
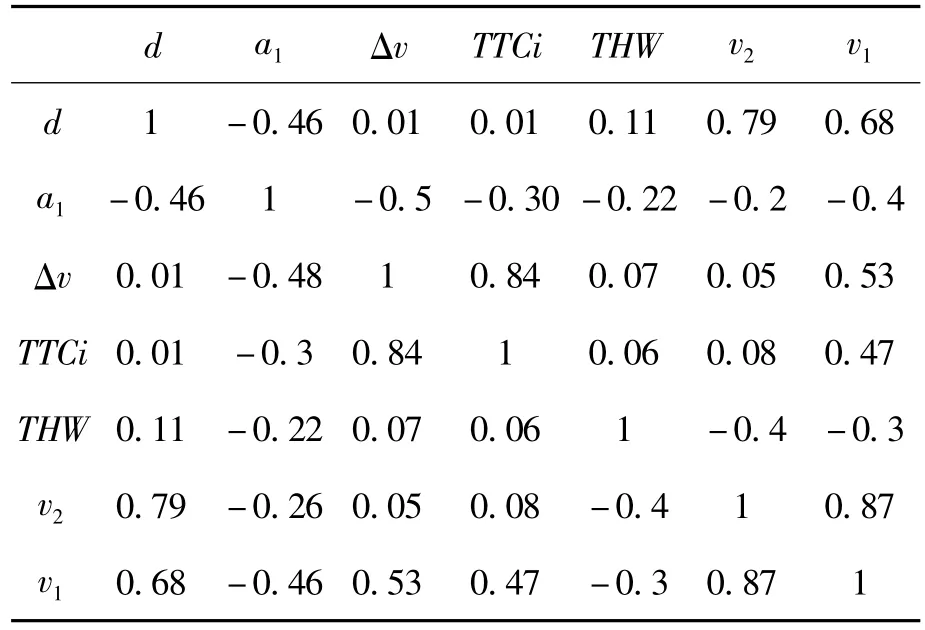
表1 相关系数矩阵
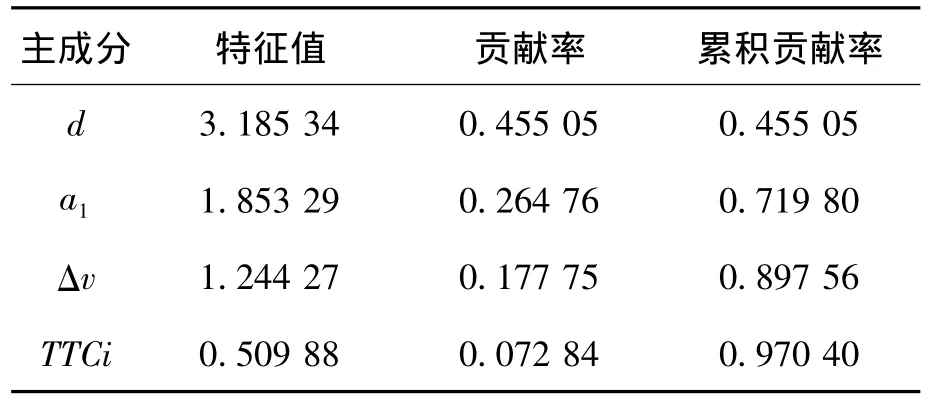
表2 特征值、贡献率、累计贡献率
由表2可见,建立制动行为模型只需要选取相对距离d、前车加速度a1、相对速度Δv、碰撞时间的倒数TTCi为输入参数即可。
2 基于BP神经网络的驾驶员制动行为模型建立
本文使用BP神经网络模型模拟驾驶员在追尾避险过程中的判断决策行为,选取有效的学习方法对模型进行修正,建立接近实际情境的驾驶员行为模型,并用训练好的模型来对驾驶员的制动行为进行预测,监督驾驶员的驾驶操作,也作为避撞预警算法使用。
2.1 BP神经网络理论
BP神经网络是一种单向传播的多层前馈型神经网络,多采用sigmoid型的传递函数。BP网络结构如图2所示。

图2 BP神经网络结构
输入向量为X=(x1,x2,…,xn)T。隐含层的输出向量为Oj=(oj1,oj2,…,ojn)T。输出层的向量为Ok=(ok1,ok2,…,okn)T。输入层与隐含层间的连接权值为wij(i=1,2,…n;j=1,2,…,l),阈值为θi。隐含层与输出层的连接权值为wik(j=1,2,…,l;k=1,2…,m),阈值为θj。
信息在正向传递过程中的隐含层的各神经元节点的输出可表示为

同理,输出层的神经元节点的输出可表示为

BP网络在应用于预测预报之前需要一个网络学习过程。网络学习过程包括信息正向传播和误差反向传播2个反复交替的过程[9-15]。在这个过程中神经网络根据实验样本不断调整各层之间的连接权值及阈值,从而使系统全局误差E实现最小化。
系统全局误差E如式(9)所示。

式中:tk(X)为输出节点k对于样本X的理想输出;Ok(X)为节点k对于样本X的实际输出。
2.2 BP神经网络结构的设计与模型建立
本文BP神经网络结构包括:1个输入层、4个输入节点;1个输出层、1个输出节点。隐含层的层数较多,可以提高网络精度,降低误差,但同时也会使网络变复杂,增加迭代非收敛的概率。从简化结构的角度出发,采用单隐含层的网络结构即可。对于隐含层节点数目前还没有准确的设计,本文通过选取不同的隐含层节点数,比较模型最终的训练效果,选取最适合的隐含层数来达到最优化的效果。
模型的训练采用的是WEKA数据挖掘软件,选取交叉验证方法来训练模型。WEKA的GUI界面各项主要参数设置为:隐含层依次设置为4~10,以选取最适合的隐层节点数;学习率为0.1;动量常数为0.2;最大训练次数为1 500。神经网络权值和阈值的修正采用梯度下降法。训练完成后的网络已经具备较高的预测精度。网络训练过程中的隐层数不同,对应的网络训练效果如表3所示。

表3 不同隐含层数的网络训练效果
从表3可以看出:最初随着隐层数量的增多误差值有较明显的减低,但减低效果不明显。直到隐层从8层变为9层时改进效果明显,误差值达到了最小化,所以本文的隐层最终设定为9层,网络拓扑结构为4-9-1。图3为模型训练效果。
2.3 模型仿真
利用训练好的模型,随机采用另外一组实验样本进行一次跟车仿真验证实验。图4的仿真过程是以8号驾驶员的最新一次的训练样本数据为输入的。根据仿真效果来看模型对其他数据有较好的通用性。
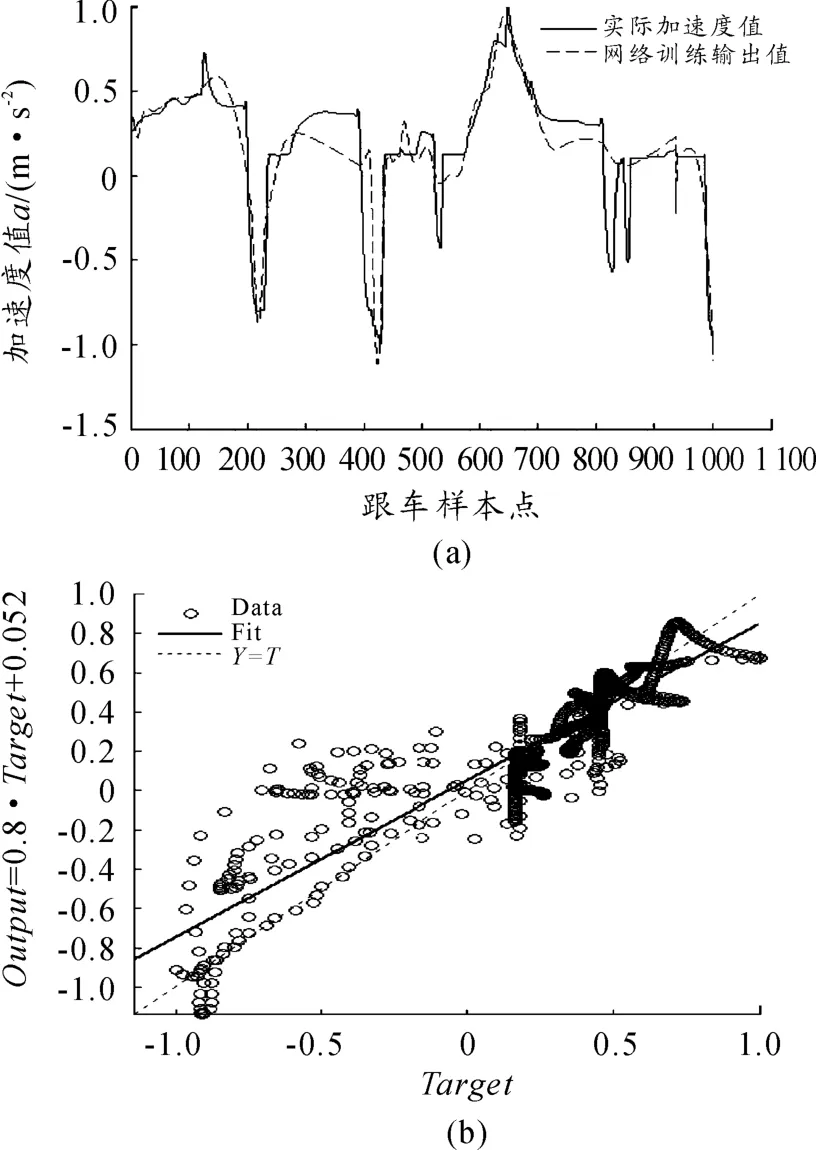
图3 模型训练效果

图4 模型仿真效果
3 结论
1)利用江苏大学模拟驾驶仪,采集了跟车过程中为避免追尾事故后车驾驶员的制动行为数据;用主成分分析法对数据进行分析,为模型输入参数选择提供了依据,降低了神经网络的输入维数,确定了用相对距离d、前车加速度a1、相对速度Δv、碰撞时间的倒数TTCi为参数来建立模型。
2)利用BP神经网络方法建立了符合驾驶习惯的制动行为模型。网络训练结果表明:建立的驾驶员制动行为模型预测值的精确度较高,并为避撞预警算法研究提供了思路。
[1]闻育,吴铁军,周春芳,等.基于决策优化模型的驾驶行为建模方法[J].浙江大学学报:工学版,2006,4(4):704-707,728.
[2]Gerry E.Warning system for fatigued drivers nearing reality with new eye data[J].Science Daily Magazine,1999(7):25-30.
[3]张磊,李升波,王建强,等.基于神经网络方法的集成驾驶员跟车模型[J].清华大学学报:自然科学版,2008,48(11):1985-1988,1992.
[4]杨新月,王晓原,王雷,等.驾驶员行为仿真模型研究进展[J].山东理工大学学报:自然科学版,2007,21(1):68-72.
[5]干宏程,孙立军,陈建阳.提供交通信息条件下的途中改道行为研究[J].同济大学学报:自然科学版,2006,34(11):1 484-1 488.
[6]Ungoren A Y,Peng H.An adaptive lateral preview driver model[J].Vehicle System Dynamics,2005,43(4):45-259.
[7]肖枝洪,冉小华.运用主成分分析法的过程控制和诊断[J].重庆理工大学学报:自然科学版,2014(1):96-101.
[8]舒先胜,丁泽中,夏亦寒,等.基于主成分分析法的油料保障能力评估[J].四川兵工学报,2014(3):76-79.
[9]姜紫峰,荆便顺.人工神经网络在交通领域中的应用[J].公路交通科技,1997(4):20-25.
[10]郑龙生,杨晓霞.基于BP神经网络模型的商务型饭店微观选址研究——以重庆市为例[J].西南大学学报:自然科学版,2011(4):162-165.
[11]赵淑芳.基于BP神经网络的煤矿矿用设备安全监测研究[J].太原理工大学学报,2013(5):619-622.
[12]毛锐.BP神经网络在作业成本预算中的应用[J].哈尔滨理工大学学报,2008(3):107-110.
[13]方一新.改进BP神经网络的EMG手指运动识别[J].激光杂志,2014(9):92-95.
[14]孟维伟.基于神经网络的交通量预测技术研究[D].南京:南京理工大学,2006.
[14]宇仁德,刘芳,石鹏.基于BP神经网络的道路交通事故预测[J].数学的实践与认识,2008,38(6):120-125.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
军事运筹与系统工程(2020年2期)2020-11-16 01:11:04
泰山学院学报(2019年6期)2020-01-14 02:34:34
军事运筹与系统工程(2018年3期)2018-03-26 06:33:02
公民与法治(2016年4期)2016-05-17 04:09:26
中亚信息(2016年10期)2016-02-13 02:32:45
天津商务职业学院学报(2015年2期)2015-02-28 16:47:22
天津商务职业学院学报(2015年1期)2015-02-28 16:47:12
深空探测学报(2014年1期)2014-02-28 15:06:04
