基于FP算法的电动汽车动力学协调控制
2015-12-04 03:04周逢军王庆辉
北京汽车 2015年4期
周逢军,王庆辉
Zhou Fengjun,Wang Qinghui
(北京汽车股份有限公司汽车研究院,北京 101300)
0 引 言
车辆动力学控制的目的在于提高汽车行驶的操作稳定性及安全性。在一般行驶工况下,驾驶员可通过操纵转向盘和加速/制动踏板来实现上述控制要求,但在恶劣工况下,只通过驾驶员的操作,不但会加大驾驶员操作负担,而且难以达到驾驶要求。随着汽车安全性技术需求的提高,ABS、ASR、ESP等车辆行驶稳定性控制器应运而生,因此对各种执行器进行统一协调控制分配至关重要。在车辆动力学协调控制中,控制分配的主要作用是将整车力/力矩指令信号转换成4个车轮驱动电机(冗余执行器)的转矩命令信号。控制分配方法主要分为2类[2]:基于非优化的分配方法和基于优化的控制方法。基于非优化的分配方法主要包括直接控制分配方法(面搜索算法、对边搜索算法等)和链式递增控制分配方法。直接控制分配方法由于算法复杂,计算成本高,不适于在线实时应用[1-2],链式递增控制分配方法具有操作量大,易受执行机构速率限制等不足点[3]。基于优化的分配方法主要分为广义逆法、线性规划法、二次型规划法等。其中广义逆法只适用于目标可达的情况,当目标不可达或未知时,使用该法误差较大,同时广义逆法计算量大,实时应用性差[6]。线性规划方法需要沿着边界检验所有极点,不适合大规模控制应用[4-5]。二次型规划方法中的 FP(Fixed Point)算法是一种简单的数值算法,计算量适中,适用于实时控制分配,且算法对较小虚拟控制量的收敛速度较快[7]。因此FP算法适用于分布式驱动电动汽车的动力学协调控制分配。
在对比几种控制分配算法的基础上,首先对分布式驱动电动汽车动力学控制分配问题进行分析,建立电动车辆动力学模型,然后根据FP算法,设计分布式驱动电动汽车动力学协调控制策略,最后通过仿真对比,证明算法策略的有效性和合理性。
1 车辆建模与控制分配问题分析
分布式驱动电动汽车动力学协调控制系统架构如图 1所示。其工作原理为:根据驾驶员输入的转向盘转角、加速/制动踏板开度,得到目标纵向车速、目标侧向车速及目标横摆角速度,计算整车传感器/状态观测器反馈值与目标值的差值,根据差值计算目标纵向力、目标侧向力及目标横摆力矩,通过全局协调控制器转换成各车轮执行器的驱动力矩,以实现对整车运动状态的控制,从而保证车辆的操作稳定性及行驶安全性。
1.1 车辆建模
在车辆坐标系xoy平面内建立整车模型,模型包括7个自由度:车辆纵向运动、侧向运动、绕z轴的横摆运动、4个车轮的旋转运动。整车受力方程如下。
式中,Fx为整车纵向受力;Fy为整车侧向受力;Mz为整车横摆力矩;fl、fr、rl、rr分别为左前、右前、左后及右后车轮;δ为转向角;Bf、Br分别为前、后轮轮距;lf、lr分别为整车质心与前轴、后轴的距离。
[8]采用魔术轮胎模型,具体公式如下。
有关轮胎模型各参数的详细资料见参考文献[9]。
相比传统内燃机汽车,驱动电机具有电机力矩响应快,力矩响应精确等特点[10-11],因此可将电机模型简化为理想模型,使用查表法输出电机的驱/制动力矩,建立模型如图2所示。
1.2 控制算法
1.2.1 控制分配协调问题分析
控制分配问题可描述为
式中,vd∈ℜm为虚拟控制量,即力/力矩;B∈ℜm×p为控制效率矩阵;U∈ℜp为控制分配解。用不动点法求解控制分配,目标函数如下
式中,Wv=diag(wv1,wv2,…,wvm)>0,Wu=diag(wu1,wu2,…,wup)>0为加权矩阵;ε∈(0 ,1)用来调节平衡控制分配误差和控制量。
1.2.2 控制算法设计
通过对轮胎动力学特性分析可知,轮胎纵向力(驱动力/制动力)为车轮滑移率的函数。轮胎侧向力为轮胎侧偏角的函数。因此分布式驱动电动汽车的动力学协调控制,最终可以通过分配控制算法,将目标横摆力矩Mzd、纵向力Fxd、侧向力Fyd转化成分配到各个轮胎的滑移率s、侧偏角α来实现。xyz平面上整车运动学方程为
令 x1=Vx,x2=Vy,x3=Ωz,则整车动力学系统状态空间表达式为北京汽车
将控制输入解耦分解成3个SISO(Sinble-Input Single-Output,单输入单输出)系统,具体如下
式中,v1=Fxd;v2=Fyd;v3=Mzd;wi( i=1,2,3)对应系统的外部扰动。取滑模面为反馈值与跟踪目标值之差
设计目标使 Si→ 0(i =1,2,3)。
滑膜控制律为
式中,Φi(i=1,2,3)为饱和函数;Ki(i=1,2,3)为切换增益。通过对轮胎力求导,可得控制效率矩阵为
3 仿真结果
整车模型采用的基本参数见表1,二次型优化求解时执行器约束极限见表2。
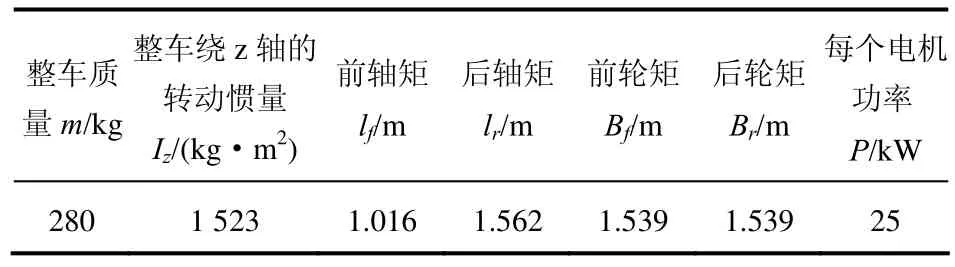
表1 整车基本参数
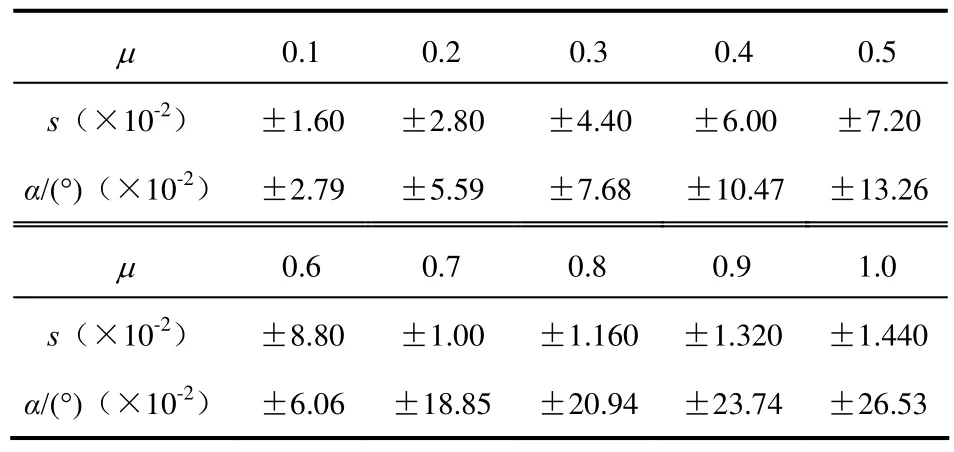
表2 控制约束极限
根据控制算法及控制分配问题分析,在Matlab/Simulink中搭建整车动力学协调控制系统模型如图3所示。
在路面附着系数为0.85、车速为120km/h条件下进行双移线仿真试验,对比FP算法控制及无算法控制,得到仿真结果如图4~图8所示。
4 结 论
将FP算法用于电动汽车冗余执行器动力学协调控制分配中,能够明显改善电动汽车轨迹保持能力及操作稳定性,同时也可以降低驾驶员驾驶强度,这对电动汽车整车动力学控制系统的开发具有重要意义,对于传统汽车动力学协调控制也具有一定的意义。
从图 4中可以看出,无控制的侧向位移与目标侧向位移最大偏差为1.3932 m,已经失控,而FP算法侧向位移与目标侧向位移最大偏差值为0.3794 m,反映了FP算法具有良好的轨迹保持能力。从图5中可以看出,经FP算法控制后的转向盘输入转角要小于无控制条件下输入转角,与后者最大偏差值为6.6174°,降低了驾驶员的驾驶强度。从图6、图7可以看出,FP算法控制的车辆横摆角速度最大值为5.5547°/s,无控制下的车辆横摆角速度为7.4063°/s,两者之间的差值为1.8516°/s;车辆质心侧偏角最大值为0.6004°,无控制下的车辆质心侧偏角为0.8005°,两者之间的差值为0.2001°,反映了FP协调控制算法能保证车辆操作稳定性。经过FP算法分配协调控制后,各个电机的力矩输入到车轮的力矩值如图8所示。
参考文献
[1]Durham W C.Constrained Controller Allocation[J].Journal of Guidance,Control and Dynamics,1993,16(4):717-725.
[2]Ola H.Resolving Actuator Redundancy-Optimal Control Allocation[J].Automatica,2005,41(1):137-144.
[3]Durham W C,Bordgon K A.Multiple Control Effectors Rate Limiting[J].Journal of Guidance,Control,and Dynamics,1996,19(1):30-37.
[4]Buffington J,Chandler P,Pachter M.On-line System Identification for Aircraft with Distributed Control Effectors[J].International Journal of Robust and Nonlinear Control,1995,9(14):1033-1049.
[5]Bodson M,Frost S A.Control Allocation With load Balancing [C].AIAA Guidance Navigation and Control Conference,2009.
[6]Bodson M.Evaluation of Optimization Methods for Control Allocation[J].Journal of Guidance,Control,and Dynamics,2002,25(4):703-711.
[7]Fletcher R.Practical Methods of Optimization[M].2rd ed.New York:Johen Willey&Sons,2000:76-83.
[8]Bernard J E,Clover C L.Tire Modeling for Low–speed and High–speed Calculations[R]. SAE Paper1995:NO950311.
[9]Pacejka,Hans B.Tire and Vehicle Dynamics,Warrendale[M].PA,USA: MPG Books Ltd,Bodmin,Cornwall,2002:187-191.
[10]Takuya Mizushima,Pongsathorn Raksincharoensak,Masao Nagai.Direct Yaw-moment Control Adapted to Driver Behavior Recognition[C].International Joint Conference,Oct.18-21,2006,Bexco,Busan,Korea:SICE-ICASE:534-539.
[11]Motoki Shino,Masao Nagai.Independent Wheel Torque Control of Small-scale Electric Vehicle for Handling and Stability Improvement[J].JSAE Review 24(2003):449-456.
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
新视线·建筑与电力(2021年2期)2021-09-10
学校教育研究(2020年3期)2020-02-18
山东青年(2016年12期)2017-03-02
科学与财富(2016年29期)2016-12-27
科技创新导报(2016年20期)2016-12-14
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
中国信息化·学术版(2013年4期)2014-01-03