平板上多通道惯性吸振器宽频主动吸振测量
2015-12-03 12:21:06刘孝斌
噪声与振动控制 2015年2期
刘孝斌,王 震,张 伟
(1.中国船舶科学研究中心,船舶振动噪声重点实验室,江苏 无锡 214082;2.中国船舶科学研究中心,新型船舶研究室,江苏 无锡 214082)
平板上多通道惯性吸振器宽频主动吸振测量
刘孝斌1,王 震1,张 伟2
(1.中国船舶科学研究中心,船舶振动噪声重点实验室,江苏 无锡 214082;2.中国船舶科学研究中心,新型船舶研究室,江苏 无锡 214082)
惯性吸振器在主动控制领域成为一个热点。其利用电磁效应产生输出力来主动控制目标物体振动,具有响应快,输出力不太大的特点,适用于轻薄材料的振动控制。实际应用中物体振动具有多源特点以及振动分布范围大,需要多个惯性吸振器同时作用产生面体范围内的控制效果,本试验中四个惯性吸振器布放于平板实施分布式控制,控制频率范围为20 Hz~120 Hz覆盖了平板的前二阶共振频率。惯性吸振器采用速度反馈控制算法对目标点的振动实施控制,速度反馈意味着主动阻尼效果,共振峰位置处控制效果明显。
振动与波;主动控制;惯性吸振器;速度反馈;宽频
潜艇声隐身技术要求的提高,使得关注重点越来越多地从被动控制领域转移到主动控制领域[2]。民用领域随着轻薄复合材料大量应用于飞机以及汽车,振动噪声的问题更为突出,这与乘客对声品质要求提高相矛盾,主动控制有了迫切的现实需要。Nelson与Elliott领导的小组对电磁型作动器在吸振和隔振方面应用进行了一些研究[3,4],得到了大量的理论结果和试验数据。Rohlfing[5]使用惯性吸振器分布式控制三明治式结构板,该结构的吻合频率低于各向同性板,可以通过主动控制方式使得其辐射低于各向同性板。
国内哈尔滨工程大学王佳静[6]利用电磁效应设计了一套主动吸振系统,其主动吸振器是在激振器外围扩展附件,在试验台架上进行了动态特性测试,然而缺少对相关控制机理的分析。刘孝斌等[7]使用阻抗方法建立了多个吸振器分布式反馈控制简支平板的振动模型,通过数值模拟揭示了速度反馈控制方式的“模态控制”和“主动阻尼”的机理,宋港等[8]理论研究了主动式自调谐吸振器在浮筏隔振系统中的应用,采用总功率流最小化控制策略,验证多频激励作用下主动式自调谐吸振器的减振效果。基于电磁效应作动器的研究除了吸振还有隔振方面,李小萍[9]基于音圈电机进行了主动隔振研究,提出了一套音圈电机应用到主动隔振的应用方案。贾鹏霄等[10]基于音圈电机进行双层隔振系统模糊前馈—反馈控制研究,提出了一套以音圈电机为主动元件隔振器为被动元件的系统。
文中首先对控制系统各个部件的参数进行了测量分析以及说明,第二部分对平板振动进行了模态分析,第三部分进行了多通道惯性吸振器主动控制试验,在不通电情况也就是不实施速度反馈控制时,共振峰向低频偏移;在通电情况下实施速度反馈控制时,共振峰得到了明显的控制效果。
1 试验描述
主动控制试验是一个综合性系统试验,如图1所示需要传感器、数字信号控制器、功放系统、作动器的系统工作产生主动控制效果。
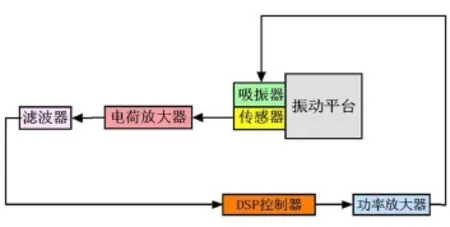
图1 反馈控制示意图
吸振试验平台如图2所示,试验平台总重量为150 kg,振动平板有效尺寸为300 mm×400 mm,其厚度为1 mm。

图2 主动吸振试验平台
信号采集系统以及信号源系统为BK Pulse-Lan Xi系统,加速度传感器为电荷型加速度计BK 4383 V,电荷放大器为BK 2692,匹配次级力的四台功率放大器为YE 5872A,匹配主级力的功率放大器为BK 2720,主级力输出力的力传感器为PCB 208 C 03,扫描平板振动的激光测振仪为OFV-505,所用的测振仪控制器为OFV-5000。
次级力采用的作动器是主动控制的执行机构,其由线圈、永磁体、弹簧以及附件组成,如图3所示,通电线圈在磁场中受到电磁力与弹性力和惯性力耦合输出作用力,作动器各个组件的参数见表1,主级力作动器采取与次级力相同,输出峰值力为100 N。
在教师的组织引导下,由每个合作小组的组长根据学习任务单上教师给出的一系列问题组织成员边练习边思考边解决问题,有针对性地“兵教兵”、“兵练兵”,在大量的练习中灵活掌握技术,认识同学间相互合作配合的重要性,从而为展示做好准备。

图3 惯性吸振器

表1 作动器各项参数
数字信号控制器选用的是TI公司的TMS 320F 2812处理芯片,有6通道的16 bit的AD转换口,转换时间为3.1 us,输入范围为(-10 v,10 v),有4通道16bit的DA转换口,转换时间为10 us,输出范围为(-10 v,10 v),满足该试验中振动主动控制的要求。输入电压绝对值不能小于0.5 V,输出电压绝对值不能小于10 mV,否则I/O系统不能有效输入输出。
激振机激励平板振动,加速度计采集得到的振动信号经三相接头,一通道直接接入采集仪,另一通道接入数字信号控制器进行积分运算得到速度信号后接入采集仪,加速度计采集得到加速度信号与控制器处理得到的速度信号进行比较,加速度信号与速度信号的理想相位差是测量它们的相位差,计算得到数字信号控制器处理数据的时间延迟。
表2为数字信号控制器四输入四输出时测量各频率相位差和时间延迟。四通道时间延迟大约为0.5 ms,由处理器延迟导致。相位差使得高频实时反馈得不到控制效果,本试验的主动控制限于低频20 Hz~120 Hz范围内。

表2 四通道各个频率相位差和时间延迟表
2 试验平板模态分析
理论计算分析简支边界条件下平板模态函数,前三阶共振频率为f=42 Hz,f=88 Hz,f=124 Hz。
前文所述振动平板的有效尺寸为300 mm×400 mm,(150 mm,350 mm)点的主级力激励平板振动,加速度计和激光测振仪测量平板的振动响应测点x方向间距37.5 mm,测点y方向间距50 mm,测点数量为49个。图4曲线为平板上所有测点的振动响应平均,振动响应曲线对应的峰值点f=46 Hz,f=97 Hz,f=128 Hz,与计算分析得到的共振频率基本吻合,前两阶共振频率位于试验测量频率20 Hz~120 Hz范围内。
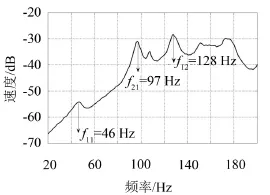
图4 主级力位于侧边位置时频响曲线
3 主动控制试验
试验如图5所示,次级力布放于(75 mm,100 mm)(75 mm,300 mm)(225 mm,100 mm)(225 mm,300 mm)位置处,主级力布放于(150 mm,350 mm)位置处。速度反馈监测用加速度计粘贴于平板背面,对应次级力布放位置,主动控制的目标函数是控制次级力位置点处的振动速度。
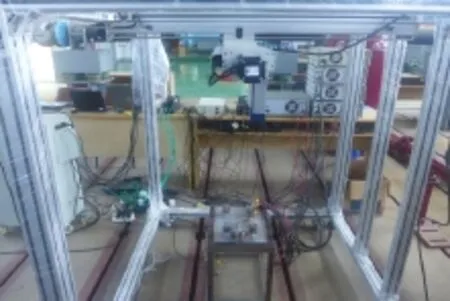
图5 试验实景图
测量平板的振动,包括次级力位置的加速度计和激光测振仪扫描,测量工况分为两种,一是吸振器布放于平板之上,不实施速度反馈控制,吸振器是弹簧和质量块组成的单自由度振动系统,其质量效应和弹性效应会对平板的受迫振动有抑制作用,达到被动控制效果;二是吸振器布放于平板之上,通电实施速度反馈控制,吸振器输出力抵消平板的振动达到主动控制效果。
图6中实线为振动平板的频响曲线,虚线为吸振器布放于平板不实施反馈控制的频响曲线,共振峰向低频位置偏移,是由于附加质量使得共振频率向低频偏移。平板质量为326 g,四个吸振器的永磁体质量为552 g,外加动圈、弹簧以及附加板的质量,吸振器质量大约两倍于平板质量,虚线的响应值要明显低于实线。

图6 整个平板被动控制示意图
图7为主动控制试验测量流程图,上半部分为主级力产生扰动,下半部分为次级力控制扰动。图8中实线为吸振器布放于平板不实施反馈控制的频响曲线,虚线为吸振器实施反馈控制的频响曲线,反馈系数为3,控制效果在共振峰位置处明显,验证了速度反馈控制位主动阻尼效果。频率f=46 Hz位置处控制效果有2 dB,频率f=97 Hz位置处控制效果有5 dB。控制效果在低于30 Hz和高于120 Hz频率出现了相反效果,低于30 Hz频率吸振器的传递函数相位为180度,出现了振动增强效果,通过高通滤波可以有效降低低频响应,高于120 Hz频率开始出现反效果,数字信号处理器的时间延迟带来的相位差使得控制效果变坏以致相反,需要在以后的研究中进一步改进时间延迟问题,试验中的数字信号控制器适用于120 Hz之内的低频范围。刘孝斌等[7]论述了分布式控制中模态控制的特点,四个惯性吸振器可以有效控制大部分模态,低频区的模态峰可以基本控制,满足主动控制中低频控制的要求。
4 结语
通过作动器元器件设计、数字信号控制器控制算法的编写以及匹配的功率放大器和传感器的选取,各个系统组件连接起来成为主动控制系统,主动吸振试验验证了四个吸振器可以对整个平板的低阶模态实施全局控制,起到了主动阻尼效果,在共振峰位置处控制效果明显,对于低频振动控制具有良好的应用前景。

图7 为主动控制试验测量流程图
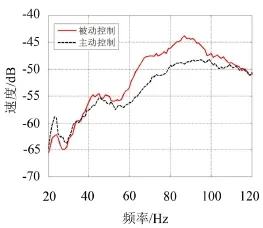
图8 整个平板主动控制示意图
[1]Lueg.P.Process of silencing sound oscillations[P].US. Patent No.2043416,1936.
[2]孔建益,李公法,侯宇,等.潜艇振动噪声的控制研究[J].噪声与振动控制,2006,(5)1-4.
[3]C.G.Diaz,C.Paulitsch and P.Gardonio.Active damping control unit using a small scale proof mass electrodynamic actuator[J].J.Acoust.Soc.Am.,2008,124(2):886-897.
[4]L.Benasssi,S.J.Elliott,P.Gardonio.Active vibration isolation using an inertial actuator with local force feedback control[J].Journal of Sound and Vibration,2004,276: 157-179.
[5]J.Rohlfing and P.Gardonio.Experimental studies on decentralized velocity feedback control on thin aluminum and honeycomb sandwich panels[J].Ottawa:ACTIVE 2009.2009.
[6]王佳静.惯性式主动吸振系统设计及其特性研究[D].哈尔滨:哈尔滨工程大学.2009.
[7]刘孝斌,俞孟萨,高岩.简支平板上多个惯性主动吸振器的控制原理以及数值分析[J].船舶力学,2014,18(7):841-848.
[8]宋港,陈卫东.主动式自调谐吸振器在浮筏隔振系统中的应用[J].噪声与振动控制,2012(3):49-54.
[9]李小萍.基于音圈电机的主动隔振技术研究[D].合肥:合肥工业大学.2008.
[10]贾鹏霄,刘文定,阚江明.基于音圈电机的双层隔振系统模糊前馈—反馈控制研究[C].北京:Proceedings of the 29thChinese Control Conference.2010.2068-2074.
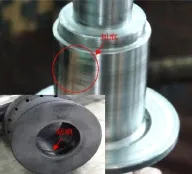
图15 涡轮端轴承与转轴表面划痕
3 结语
(1)试验呈现了轴向碰磨与径向碰磨,工频引起的碰磨与低频引起的碰磨的典型轴心轨迹及频谱特征,为碰磨故障的识别与碰磨故障诊断系统的建立提供了试验依据;
(2)从轴心轨迹、频谱图及伯德图上分析了轴向碰磨与径向碰磨的区别;
(3)由于第一次碰磨是由于低频振荡发展产生的,所以在轴承与转子的设计与升速试验中必须采用有效措施抑制或消除低频振动现象的发生,防止碰磨的发生与设备的损坏。
参考文献:
[1]游磊,胡俊,古沐松,等.基于二进小波能量自功率谱的转子碰磨故障特征提取[J].煤矿机械,2013,34(2):239-241.
[2]张乃强.汽轮机高压内缸径向碰磨的分析及研究[D].北京:华北电力大学,2005,1
[3]江波,耿玉仙,姜兆敏.非线性局部碰磨转子的局部分岔分析[J].江苏技术师范学院学报,2004,10(4):26-29.
[4]崔淼,张韬,孟光,等.航空发动机转子系统碰磨故障的试验研究[J].振动与冲击,2004,23(3):17-20.
[5]张跟胜,丁千,陈予恕.轴向摩擦双盘转子的振动分析[J].机械强度,2009,31(5):712-718.
[6]丁 千.转子—轴承系统受轴向摩擦时的振动[J].机械强度,2004,26(2):132-137.
[7]陈虹微.离心压缩机碰摩振动建模及改进方法[J].噪声与振动控制,2013(,2):205-210.
[8]单颖春,刘献栋,张洪婷.涡轮增压器转子的振动分析及故障诊断[J].噪声与振动控制,2006(,1):73-76.
ActiveAbsorption Measurement of Panels Using Multichannel InertialAbsorbers in Wideband Frequencies
LIU Xiao-bin1,WANG Zhen1,ZHANG Wei2
(1.National Key Laboratory of Ship Vibration&Noise,China Ship Science Research Center, Wuxi 214082,Jiangsu China; 2.New Type Ship Research Department,China Ship Science Research Center, Wuxi 214082,Jiangsu China)
Inertial absorber research is becoming a hot research concentration in the area of active control.In inertial absorbers,electric-magnetic effect is employed to generate the output force to control the objective body vibration actively. These absorbers have the advantage of fast response and medium output force,and are suitable for the vibration control of flexible and light material components and thin structures.In reality,the objective body vibration has the characteristics of multiple sources and wide distribution.Thus,multiple inertial absorbers are needed to achieve a good global control effect. In this test,four inertial absorbers were distributed on a panel to implement vibration control in the frequency range between 20 Hz and 120 Hz which covers the first two resonance frequencies of the panel.The velocity feedback control algorithm of the active damping was adopted to implement the control.The effect of the control was found to be significant at the resonance frequencies.
vibration and wave;active control;inertial absorber;velocity feedback;wideband frequency
TB535.1
A
10.3969/j.issn.1006-1335.2015.02.047
1006-1355(2015)02-0213-04
2014-06-25
刘孝斌(1984-),男,山东潍坊人,硕士,主要研究方向:振动与噪声的控制。E-mail:liuxbin@aliyun.com
王震(1990-),男,硕士,主要研究方向:振动主动控制与信号处理。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
汽车实用技术(2021年16期)2021-09-09 02:15:18
装备制造技术(2020年9期)2021-01-26 00:14:42
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
西安航空学院学报(2017年3期)2017-07-05 14:58:36
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
浙江大学学报(工学版)(2015年8期)2015-03-01 01:19:26
噪声与振动控制(2015年4期)2015-01-01 07:08:32