平面摆动式手柄操纵机构设计与仿真分析
2015-11-30 08:20:26段克军涂群章林加堃郑伟杰
装备制造技术 2015年10期
段克军,涂群章,林加堃,郑伟杰
(中国人民解放军理工大学野战工程学院,江苏 南京210007)
工程机械在抢险救灾、危房拆卸、隧道施工、高温炉渣的清除等危险环境下使用较为广泛,为了减少危险环境对施工人员的伤害,设计出一套机构代替人对工程机械各操纵杆进行操作很有必要。在各种工程机械装备中,平面摆动式手柄应用较多,本文以某型挖掘机平面摆动式手柄为例,设计一种五连杆机构,并进行仿真分析。
1 平面摆动式手柄操纵机构工作原理
图1所示为平面摆动式手柄操纵机构,采用五连杆机构,其中1是主动杆,2是连杆,3是摆动手柄,M端连接驱动电机输出轴,D点为摆动手柄与连杆的铰接点,N是手柄在驾驶室中的安装基点,等腰直角三角形PBC是一个三副元素构件。主动杆1在驱动电机的带动下顺时针或逆时针摆动,经连杆2带动摆动手柄3运动。
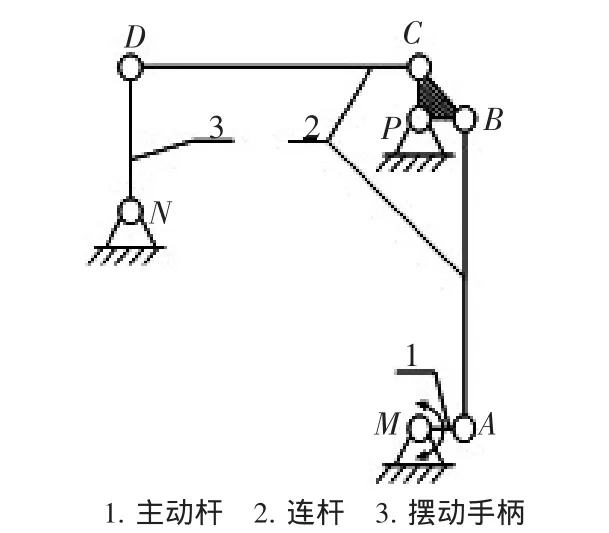
图1 平面摆动式手柄操纵机构
为了方便操纵机构在驾驶室内的安装布置,初步设定 PM=AB=400 mm,AM=PB=PC=150mm,DC=700mm,∠MAB=∠NDC=90°,CN=200 mm.各构件的尺寸和相互之间的装配关系确定之后,进行机构运动性能的分析。
2 运动性能分析
根据实际测量得到,手柄的摆动角度范围为±30°,操作力为 30 N.由于 PM=AB,AM=PB 且∠MAB=90°,所以四边形 MABP 为矩形,故 ωMA= ωPB,又因为PBC是等腰直角三角形,所以ωPB=ωPC,故ωPC=ωMA.平面摆动式手柄操纵机构中ωDN与ωMA关系可以用图2来分析。
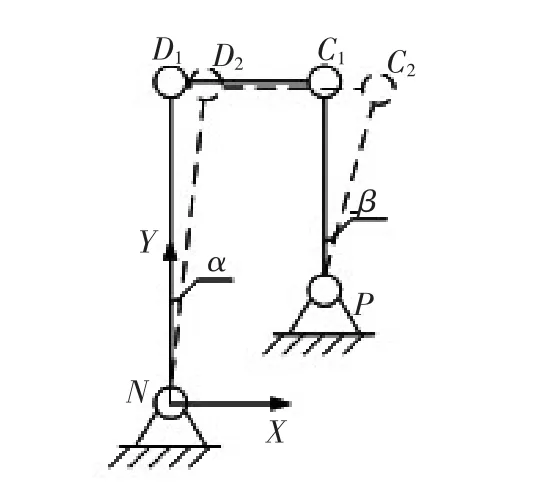
图2 连杆机构运动分析
在图2中建立XNY坐标系,由零件长度和初始装配关系可知 N,D1、C1、P 点的坐标,即 N(XN=0,YN=0),P(XP=700,YP=50),D1(XD1=0,YD1=200),C1(XC1=700,YC1=200),假设当PC1摆动β角度到达新位置PC2时,ND1摆动α角度到达新位置ND2,可得D2的坐标值:

和C2点的坐标:

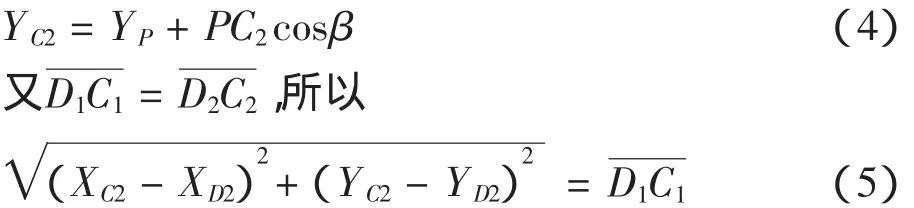
将各点坐标和式(1~4)代入式(5)并化简,利用MATLAB绘制α与β的关系曲线,如图3所示。

图3 手柄摆动角度与主动杆摆角的关系曲线
根据实际情况,由于手柄摆动角度范围是±30°,所以在设定的尺寸条件下,平面摆动式手柄操纵机构实际转动范围为图3中的加粗曲线部分,由图可知,当 α = 30°时,β = 42°,当 α = -30°时,β = 318°即为β=-42°.即当主动杆MA向某方向摆动42°时,摆动手柄就同方向摆动至极限位置。平面摆动式手柄操纵机构在某型挖掘机上的安装如图4所示。
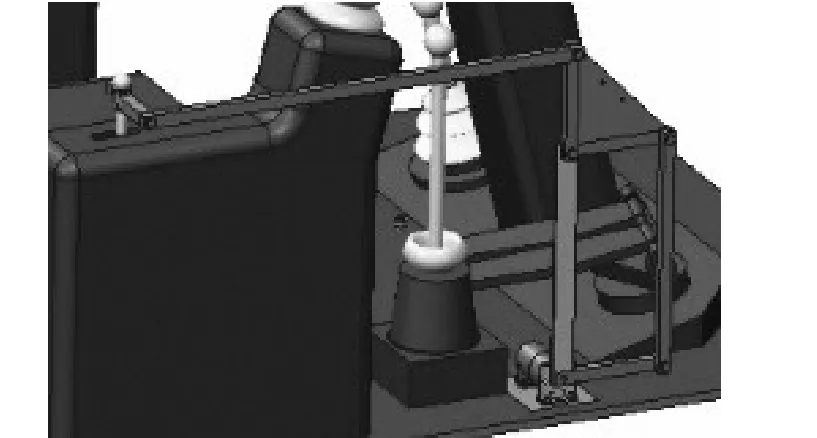
图4 平面摆动式手柄操纵机构安装图

利用MATLAB的Sum of Sin Functions Fitting工具,得到手柄摆动角度α与电机输出轴回转角度β之间的多项式关系式:其中 a1=6 413,b1=0.05 931,c1= 0.02 404,a2= 6 377,b2 = 0.05 945,c2 = -3.117.式(6)(7)分别表示主动杆与手柄的角度关系正解和反解,据此可对平面摆动式手柄操纵机构的角度进行控制。
3 动力学仿真
为分析机构重要关节处的受力情况,并且对驱动电机进行选型,需要对平面摆动式手柄操纵机构进行准确的动力学仿真。
利用多体动力学软件ADAMS建立平面摆动式手柄操纵机构模型并添加正确的约束类型,在主动杆处设置MOTION,完成动力学模型的初步建立,如图5所示。然后在手柄与groud的接触点处设置阻力转矩FRICTION为6 000 N·mm.由于摆动式手柄操纵机构的操作力较小,故选用铝制连杆,将所有连杆的密度设置为铝的密度。最后,将主动杆转速规律设置为先加速再匀速最后减速的工况,将总的仿真时间设置为2 s,运行仿真。
图6 所示为MOTION处的转矩即驱动电机输出转矩的变化曲线。

图6 驱动电机输出转矩曲线
由图6可知,在起始的加速过程中,电机的输出转矩不断增大,某时刻达到转矩峰值2 986 N·mm.根据电机输出转矩峰值,本操纵机构选择以上海四宏电机有限公司型号为57BYGH255-3004A的步进电机作为动力源,搭配减速比为4:1的行星减速器,电机主要参数如表1所示。

表1 57BYGH255-3004A型步进电机技术参数
4 结束语
设计的五连杆操纵机构本身结构简单,形状狭长,特别适合在各种工程装备驾驶室内的安装和尺寸调整。通过运动性能分析和动力学仿真得到了电动机转动角度和摆动手柄摆动角度的关系,为以后电控系统的设计提供了依据
[1]龚 俊,翟延华.挖掘机遥控手柄的研究[J].科学技术与工程.2007,7(24):6424-6426.
[2]陈 泽,占海明.详解MATLAB在科学计算中的应用[M].北京:电子工业出版社,2011.
[3]刘 莹,吴宗泽.机械设计教程[M].北京:机械工业出版社,2008.
[4]申永胜.机械原理教程[M].第2版.北京:清华大学出版社,2005.
[5]贾长治,殷军辉.MD ADAMS虚拟样机从入门到精通[M].北京:机械工业出版社,2011.
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:30
装备制造技术(2020年2期)2020-12-14 03:09:26
四川冶金(2018年1期)2018-09-25 02:39:26
电子制作(2018年11期)2018-08-04 03:25:44
通信电源技术(2016年1期)2016-04-16 04:57:26
科普童话·百科探秘(2015年5期)2015-05-26 07:10:33
小朋友·快乐手工(2015年3期)2015-04-10 00:26:12
电机与控制应用(2015年3期)2015-03-01 03:49:59
机械工程师(2015年9期)2015-02-26 08:38:12
机械工程师(2015年10期)2015-02-02 01:14:36