蓝牙路标辅助车辆定位方法研究
2015-11-24 13:01:23孙亚飞潘通
科技创新导报 2015年26期
孙亚飞 潘通

摘 要:车辆定位是智能交通系统的核心部分,现有车载导航大多采用GPS与DR航位推算系统组合的方式。针对GPS/DR车载导航系统在高楼、遂道等GPS被遮挡情况下存在定位盲区的问题,该文利用蓝牙路标信息,在导航盲区安装蓝牙路标传感器,对GPS/DR定位结果进行修正。该课题中重点研究了蓝牙路标传感器定位误差修正方法,并分析了路标定位误差模型。研究结果表明:当车速<70 km/h,通过路标定位修正位置精度可以达到10 m;当车速>70 km/h,且<170 km/h,位置修正精度可以达到20 m以内。
关键词:车载导航 蓝牙路标 航位推算 位置修正
中图分类号:TP23 文献标识码:A 文章编号:1674-098X(2015)09(b)-0026-03
Research of Vehicle Location Assisted by Bluetooth Signposts
Sun Yafei Pan Tong
(High School Affiliated to Nanjing Normal University,Nanjing Jiangsu,210003,China)
Abstract:The vehicle location is the core part of intelligent transportation system, most of the existing vehicle navigation use GPS and Dead Reckoning(DR) navigation system. To solve the GPS/DR system problems of positioning blind area problem in high-rise buildings or tunnels,this paper uses bluetooth information, and installs bluetooth signposts sensor in navigation blind area,to correct the GPS/DR positioning results.This topic mainly studies the positioning error correction methods of bluetooth signposts sensor, and analyzes the signpost positioning error model.The results show that when the speed is less than 70 km/h, fixed position accuracy using bluetooth signposts can reach 10 meters;when the speed is more than 70km/h, and less than 170km/h, position correction precision can reach within 20 meters.
Key Words:Vehicle navigation;Bluetooth signposts;Dead reckoning;Position correction
交通是當今世界发展的一个重要问题。城市交通拥堵、交通事故频发、交通环境恶化成为当今世界各国面临的共同问题,无论是发达国家还是发展中国家都承受着不断恶化的交通困扰[1]。城市中,为了提高车辆的运行效率,需要对车辆进行监控和调度。为此,出现了智能交通系统(Intelligent Transportation System,ITS)。
ITS运用先进的信息技术、电子通讯技术、自动控制技术、计算机技术以及网络技术解决交通中存在的诸多问题。ITS通过系统集成,将道路、驾驶员和车辆有机地结合在一起,同时加强了三者之间的联系,借助于系统的智能化技术,驾驶员可以实时了解道路交通以及周围车辆的分布状况,以最为安全和经济的方式到达目的地。同时,管理人员通过对车辆、驾驶员和道路信息的实时采集来提高其管理效率,以达到充分利用交通资源的目的。
车辆导航系统是ITS系统的核心部分,是其它各种功能的基础。ITS中交通管理系统、自动避撞系统、自动收费系统、动态路线引导系统以及公共运输中的车辆调度和管理系统都不同程度地依赖于车辆的位置信息,假如车辆导航系统不能提供ITS要求的位置精度和可靠性,ITS中大部分功能都将无法实现[2]。
全球定位系统GPS,能提供精确的四维时空信息,已广泛应用于定位导航、资源勘查等领域[3]。从目前国内外的研究报道来看,车辆的导航与定位都是基于GPS的前提下,辅以航位推算DR、地图匹配MM等[4]。由于航位推算定位误差随时间发散,而地图匹配算法也只有在车辆拐弯时才能提供与地图精度相当的定位信息,因此当由于高楼、遂道的遮挡,较长时间内没有GPS信号时,即使有DR、MM辅助,也难以进行高精度的导航定位,也就是说这种方式存在导航“盲区”[5]。
该文中将蓝牙技术用于车辆导航系统。在GPS定位盲区设定基于蓝牙的路标传感器(Bluetooth Beacon,BB),采用GPS/DR/BB组合导航,解决了车辆导航中的盲区问题,实现了城市中全区域、全天时的导航与定位。文中将首先对GPS/DR组合定位原理进行分析,研究BB辅助定位的误差特性,提出基于BB的位置修正模型,并通过实例分析所采用模型的有效性。
1 车辆GPS/DR组合定位原理
城市中,由于受到高楼、树荫的遮挡,GPS信号很弱,严重影响GPS的定位精度和定位可靠性。因此,城市车辆定位中单纯的GPS定位无法满足系统在定位精度和定位可靠性方面的要求,而DR(Dead Reckoning)航位推算可以在一定程度上弥补GPS的上述不足[6]。
车辆航位推算方法是一种常用的自主式车辆定位技术,它在水平直角坐标平面内推算车辆的位置。车辆导航计算机以一定频率采集陀螺仪、里程仪信息,在已知车辆初始位置的情况下,利用实时采集的陀螺仪和里程仪数据,推算得到下一时刻车辆的位置。
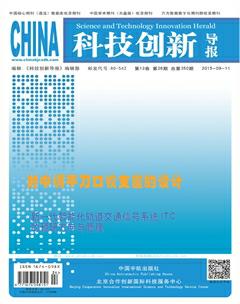
图1所示为航位推算原理示意图,A为起始时刻的位置,后续的B、C、D等各点的位置坐标可以通过式(1)进行计算得到:
(1)
式(1)中,和表示车辆在时刻的东向、北向位置;是车辆从时刻到时刻内向前行驶的距离;是车辆在时刻的航向;是车辆时刻到时刻转动的角速率(模型中,假定车辆在一个采样周期内以匀角速率转动);是航位推算的周期。
由以上分析可以看出,DR航位推算是一个位置、航向累积的过程,由于传感器采集的数据总会存在一定误差,因此,纯DR航位推算误差随时间增加而变大。但是,航位推算可以实现系统的连续定位,不会出现GPS定位過程中出现的信号中断现象。通过GPS/DR组合计算,可以充分利用GPS、DR各自的优点,弥补双方的不足,提高整个系统的定位精度和定位可靠性。
2 蓝牙路标定位误差修正
蓝牙技术是一种开放性的、短距离无线通信技术标准[7]。它可以在较小范围内通过无线连接方式实现固定设备以及移动设备之间的网络互联,可以在各种数字设备之间实现灵活、安全、低成本、小功耗的数据通信。采用蓝牙技术来实现车载导航系统与路标之间的数据通讯,具有很好的使用前景[8]。
2.1 蓝牙路标定位误差修正算法研究
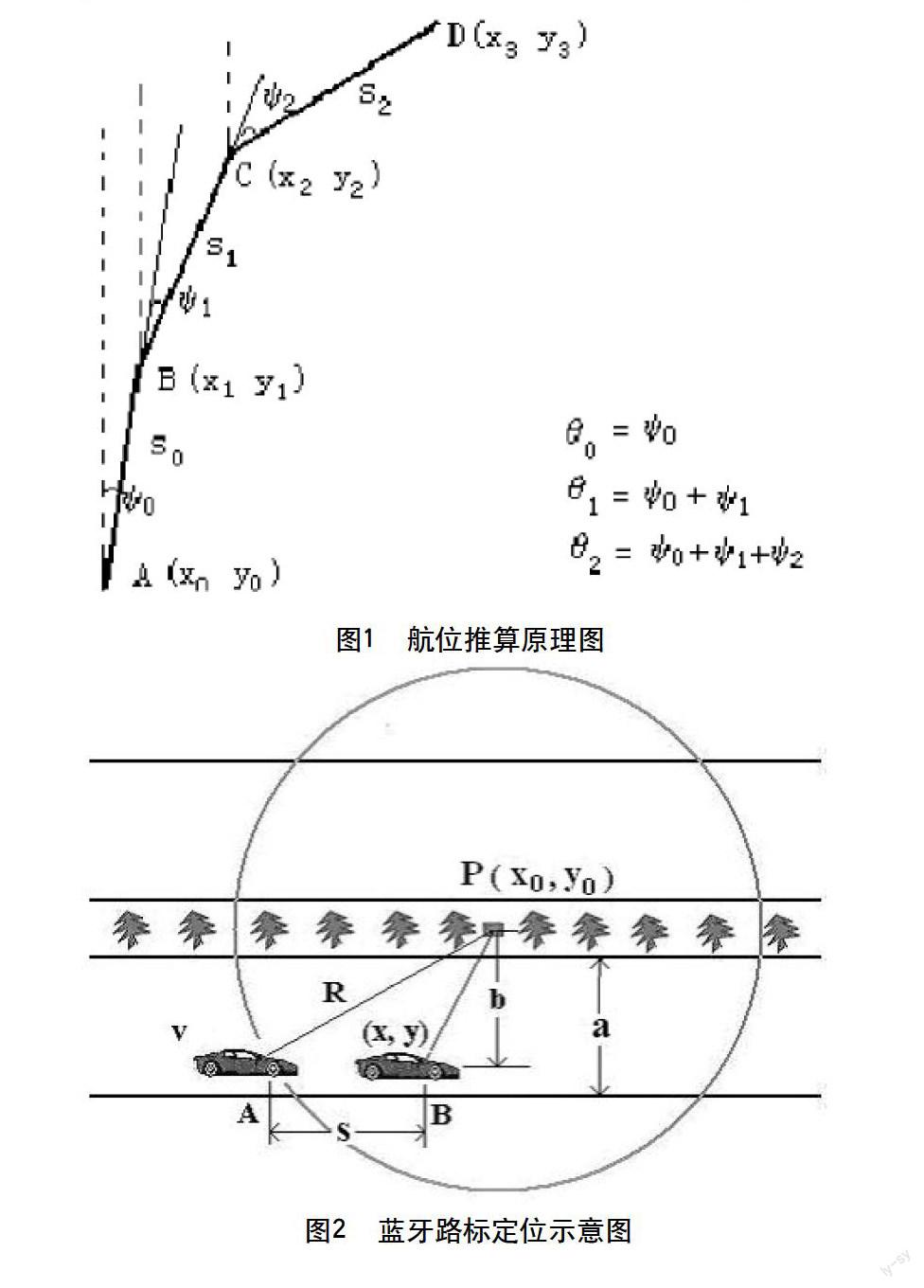
不同的蓝牙模块通讯距离也不同,假设蓝牙模块通讯距离为R。设图2中P点布置有一个蓝牙路标,P点的坐标为(x0,y0),该蓝牙模块作用范围为半径R的圆。现有一车以速度v向前行驶,当车辆行驶至蓝牙路标的有效作用区域(A点)时,两模块间开始试图建立通讯,直至车辆行驶到B点时通讯建立完毕,车辆获得了P点的坐标值(x0,y0)。
如果用P点坐标来修正车辆的位置,则必然会带来一定的误差,应该用B点的坐标来修正车辆的位置信息才是正确的。
设B点的真实坐标为(x,y),从图2中几何关系可以得到:
(2)
式中,b表示汽车与蓝牙路标间沿道路垂直方向上的距离,t表示车辆从A点行驶到B点的时间,也即蓝牙模块建立通讯的时间。通过大量实验发现,运动过程中车载设备和蓝牙模块建立通讯的时间约为2~3 s,计算时可取时间t为2.5 s。
另外,为了保证车辆至少连接一次,速度需要满足:
(3)
下面针对不同的情况来分析蓝牙路标的定位误差。
2.2 直接利用路标位置修正车辆位置
由公式(2),可以求出x,y方向以及平面距离误差分别为:
(4)
公式(4)表明,直接修正情况下的位置误差与蓝牙通信距离R、车辆与蓝牙路标的垂直距离b、车速v、蓝牙模块通信建立时间t有关。
取车速v=50 km/h,通讯时间t=2.5 s,b=a/2=10/2=5 m,则 m m,
m。
在R、b、t取值一定的情况下,车速不同,对应的修正误差也不相同,当车速时,距离最小。取R=100 m,b=5 m,t=2.5 s,可以计算当v=143.8 km/h时,x=0 m,y=5 m,d=5 m,此时车辆与蓝牙路标间距离最短。同时可以得出如下结论:当车速范围为120~170 km/s,直接修正的定位误差<20 m。
2.3 蓝牙路标的修正补偿算法
车辆行驶中可能沿着道路的内侧(快车道)或外侧(慢车道)行驶,公式(2)中,b的取值难以确定。而通讯建立时间t的选取也有一定误差[9]。因此b、t的取值会给B点坐标的计算带来定位误差。下面讨论速度v、蓝牙通讯时间t、以及道路宽度b的变化对修正结果的影响。
(1)通讯建立时间对蓝牙路标定位误差的影响:从公式(2)可以看出,通讯建立时间仅对x方向位置误差有影响,由试验数据,蓝牙通讯的建立时间t取值范围为2~3 s。因此可以得到定位误差的最大值、最小值以及定位误差的取值范围。
(5)
式(5)表明:在蓝牙通讯建立时间t不定(路宽b已知)的情况下,x方向的距离误差与车速有关,x方向上的距离误差范围随着车速v的增加而增加;x方向的距离误差为常值。
(2)道路宽度对蓝牙路标定位误差的影响:道路宽度取值范围为0~a。从式(2)可以得出定位误差的最大值、最小值以及定位误差的取值范围:
(6)
从式(6)可以得出:随着道路宽度a值的增加,x方向上的定位误差范围增大,y方向上的定位误差范围不变。
(3)道路宽度及通讯时间对蓝牙路标定位的综合影响:而当车辆沿道路内侧外侧行驶时,b取值为0~a;通讯时间t=2~3 s,则B点的最大、最小坐标为:
(7)
取蓝牙通讯建立时间t为2.5 s,b取为道路宽度a的一半。则B点坐标(x,y)为
(8)
由公式位置修正模型(8)修正车辆位置,x、y方向的修正误差为:
(9)
(4)模型修正数据分析。假设蓝牙模块作用范围R=100 m,道路宽10 m。对于以速度50 km/h行驶的车辆,由式(9)可得修正误差为:7.3 m, m;对于以速度120 km/h行驶的车辆,修正误差为:17 m, m。公式(8)表明:x方向误差与车辆行驶速度有关,y方向误差与道路宽度相关。如果要求10 m的定位精度,则要求车辆速度小于70 km/h。
直接用蓝牙路标位置修正车辆位置:当车辆以速度50 km/h行驶, m, m;当车辆以速度120 km/h行驶, m m。显然,车速为120km/h的时候,直接修正精度较高。
针对上述讨论情况,得出结论:
1)当车速小于120 km/s,采用公式(8)进行修正;
2)当车速大于120 km/s且小于170 km/s时,采用蓝牙路标的位置直接代替车辆位置。
通过以上方法的修正,系统定位精度可以达到10 m(车辆速度小于70 km/h)或者20 m(车辆速度大于70 km/h,且小于170 km/h)以内。
2.4 位置修正中特殊情况分析
上述的蓝牙路标修正算法中,仅考虑了一般的情况,并没有对一些特殊情况进行分析。下面就其中几种特殊情况进行分析。
(1)车速上限分析。从上文中,我们知道蓝牙通讯有一定的建立时间,为2~3 s,如果车速过快,在没有连接上的情况下,车辆就离开蓝牙通信范围。对公式(3),取R=100 m,b=10 m,t=3 s,可以得到车速上限v=240 km/s。
(2)车速较低情况考虑。车速较慢时,蓝牙路标有可能与车辆建立不止一次的通讯连接。如果进行二次蓝牙位置修正,则需要建立更加复杂的模型,以进一步提高蓝牙路标位置修正精度[10]。
3 结语
该文首先研究了车辆导航系统的基本原理与算法,针对GPS全球定位系统和DR航位推算系统单独实现车辆导航的不足,引入蓝牙路标信息,提出BB辅助GPS/DR组合定位方案。接着,文中重点针对蓝牙路标位置修正算法进行了研究,建立了道路宽度、车辆速度、蓝牙路标通信建立时间与定位误差间的关系模型;并使用模型修正车辆的位置,对影响定位误差的3种因素(道路宽度因素、车辆速度因素、蓝牙路标通信建立时间因素)进行理论与数据分析。
该文研究结果表明:当车速<70 km/h,位置修正精度可以达到10 m;当车速>70 km/h,且<170 km/h,位置修正精度可以达20 m以内。
参考文献
[1] 黄卫,陈里得.智能运输系统概论[M].北京:人民交通出版社,1999:57-60.
[2] 鄭平方,常青,张其善.车载GPS/DR组合导航系统的研究[J].北京航空航天大学学报,1999,25(5):513-516.
[3] 徐绍铨,张华海,杨志强.GPS测量原理及应用[M].武汉:武汉大学出版社,2001:101-117.
[4] 陆涛,刘建国,张乃镇,等.GPS/DR车辆导航系统工程实现[J].导航,2000,36(1):97-101.
[5] 房建成,李学恩,申功勋,等.市区车辆GPS/DR组合导航系统的研究[J].中国公路学报,1999(1):84-89.
[6] 关桂霞.车载Gps/DR组合导航系统研究[D].太原:华北工学院,2001.
[7] 严紫建,刘元安.蓝牙技术[M].北京:北京邮电大学出版社,2001:32-50.
[8] 张浩,赵千川.蓝牙手机室内定位系统[J].计算机应用,2011,31(11):3152-3156.
[9] 朱冬海.基于Windows Mobile与蓝牙GPS的辅助定位系统研究[J].现代测绘,2008,31(5):16-18.
[10] 周琳.谈谈蓝牙技术的定位和灵魂[J].光盘技术,2006(6):22-23.