基于LabVIEW平台的新型二维微位移传感器设计*
2015-11-18 04:55:03周国全孙东振彭获然
传感技术学报 2015年4期
周国全,孙东振,彭获然
(1.武汉大学物理科学与技术学院,武汉 430072;2.厦门一中海沧附属学校,福建厦门 361000)
基于LabVIEW平台的新型二维微位移传感器设计*
周国全1*,孙东振1,2,彭获然1
(1.武汉大学物理科学与技术学院,武汉 430072;2.厦门一中海沧附属学校,福建厦门 361000)
基于矩形谐振腔的光学等倾干涉原理,设计了一种新型的二维微位移传感器系统,该系统通过电耦合器件(CCD)技术对等倾干涉产生的周期性干涉条纹进行光电转换,然后将电信号导入信号处理系统进行采集与存储,最后由串行通信发送至计算机,在LabVIEW平台进行实时的监测。仿真实验结果显示,系统测量精度可以达到1 μm~0.1 μm.该系统采用矩形腔等倾干涉和F-P干涉相结合的方法,结构简单,成本低廉,且能够同时对二维微位移进行精确测量,可以应用于水利工程检测维护,大型建筑安全监测、精密加工中的实时控制等很多方面。
位移传感;矩形干涉腔;光学干涉;等倾干涉;电耦合器件(CCD);LabVIEW;二维微位移
科学技术和工业的发展一般都是以测量技术的发展为先导的,高精度的位移测量系统是机械仪表、工具、兵器、宇航等产业获得对位移的精密检测与控制的基础,也是上述产业产品及技术不断进步的制约因素。近年来,传感器技术飞速发展,对于微位移或微角位移进行测量的传感器的研究已成为国内外研究的重要方向和主要课题[1-4]。传统的基于压电效应、霍尔效应、光纤原理等物理规律的传感测量技术已经颇为成熟,但也存在一些不足,此类传感测量技术一般都是一维的位移测量,且测量精度不是很高。利用光纤干涉仪测量位移,具有测量精度高的特点,也是近年来应用的热点之一。另一方面传统的基于光强的F-P传感器,由于腔长与光强之间是高阶非线性的关系而难以处理,且仅能运用于一维光学测量。在二维(角)位移传感方面,依据光纤技术、应变原理、二维磁效应、差动电感式及各类光电式传感器研究方面,已有一定的技术基础与经验积累,例如文献[3]给出了一种基于应变方式进行二维微位移(纳米级)测量的系统,文献[4]设计了一种基于线阵CCD的微小角位移传感器。但测量精度,操作难易度,以及成本方面也是参差不齐。近年来随着电耦合器件CCD(Charge Coupled Device)的不断完善和提高,CCD技术已广泛用于各种非接触实时测量领域,极大地提高了位移测量精度,如文献[4]。而等倾干涉原理与技术方面的最新进展,如文献[5-6],为二维光学微位移传感技术的研究提供了新的技术方向和可能性,如文献[7-8]。
本文基于作者已公开发表的矩形腔等倾干涉原理[3]和LabVIEW平台,借鉴了作者与其研究生在文献[6]中运用等腰劈的等倾干涉实现微位移光学传感设计的得失经验,设计了一种新型的基于CCD技术的二维微位移传感器。该系统采用两组等倾干涉原理产生的干涉条纹作为前信号,经CCD进行光电转换后,通过单片机进行信号的采集与预处理,并且将信号通过串行通信发送给PC机进行绘图,进行实时的位移监测。因为等倾干涉为多光束干涉,其干涉条纹细锐,明暗对比强烈,所以精度很高,理论上可以达到10-6m~10-7m,因此本系统在肉眼难以观察的微位移测距方面有很大的应用前景。与作者在文献[7]的设计相比,本文对微位移传感器的设计思路是基于新颖的矩形腔等倾干涉原理,与文献[5-7]所述等腰劈的等倾干涉原理一样,具备多光束等倾干涉所特有的诸般优点,例如条纹细锐,明暗对比强,分辨本领高等;同时本文的设计更避免了文献[7]中传感设计的种种弊端_对位移传感的测量仅限于分时分维模式,即对一个维度的干涉板进行位移测量时,必须固定处于另一维度上的干涉板;因为干涉强度的变化对X与Y方向的位移的响应是融合在一起而不加区分的。为区分它们,文献[7]只能采取忍痛牺牲对任一维度上进行持续测量的要求。这就不可避免地给测量的连续性与精度带来不利影响。而本文的新设计避免了这一缺憾。在X与Y两个方向的位移都可被持续、实时而且相互独立地加以检测。
1 传感系统的设计与实现
1.1 系统组成
本论文研究的系统可分为4个部分,如图1所示。
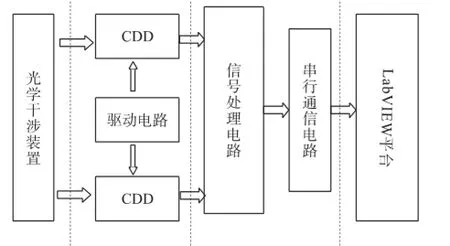
图1 系统组成
第1部分,等倾干涉装置,主要由矩形腔内的等倾干涉和F-P两组干涉组成,是通过被测物体的移动进而产生干涉条纹的移动作为光信号。
第2部分,CCD光电转化装置,该部分包括两个CCD和CCD的驱动电路,两个CCD分别接收又两组干涉条纹产生的光信号,然后将它接受到的光信号转化成电信号。
第3部分,单片机部分,包括信号处理电路和串行通信电路,主要对接收到的电信号进行处理,它控制X,Y方向的信号采集并进行预处理,然后将信号通过串口送到PC机。
第4部分,测量结果的显示部分,这主要通过LabVIEW平台来实现,同时显示X轴和Y轴方向上的位移,显示结果为位移-时间曲线。
1.2 矩形腔等倾干涉原理
矩形腔等倾干涉不仅对F-P干涉技术具有等效性与补充作用,而且具有新的特点,既可对入射光的偏振性进行“改造”以获得高偏振度的线偏输出,又可对干涉强度实行二维余弦调制,从而实现二维微位移的光学传感。诸如此类的特性表明,对矩形腔的干涉原理进行详细推导很有必要[5]。
如图2所示,ABCD是一个矩形腔,ABCD是腔内外媒介的分界面,内外媒介的折射率分别为n2,n1,当平行光束I以任意给定的入射角i0和入射位置P点射入腔内,腔外的反射线I',腔内部分经各边顺次反射之后形成一系列的反射回路,如PP1P2P3P4…不一定闭合,每一个反射回路在界面DC,AB各向外透射一次,在界面DC得透射线T1,T2,…,在界面AB得透射线T1,T2,…。
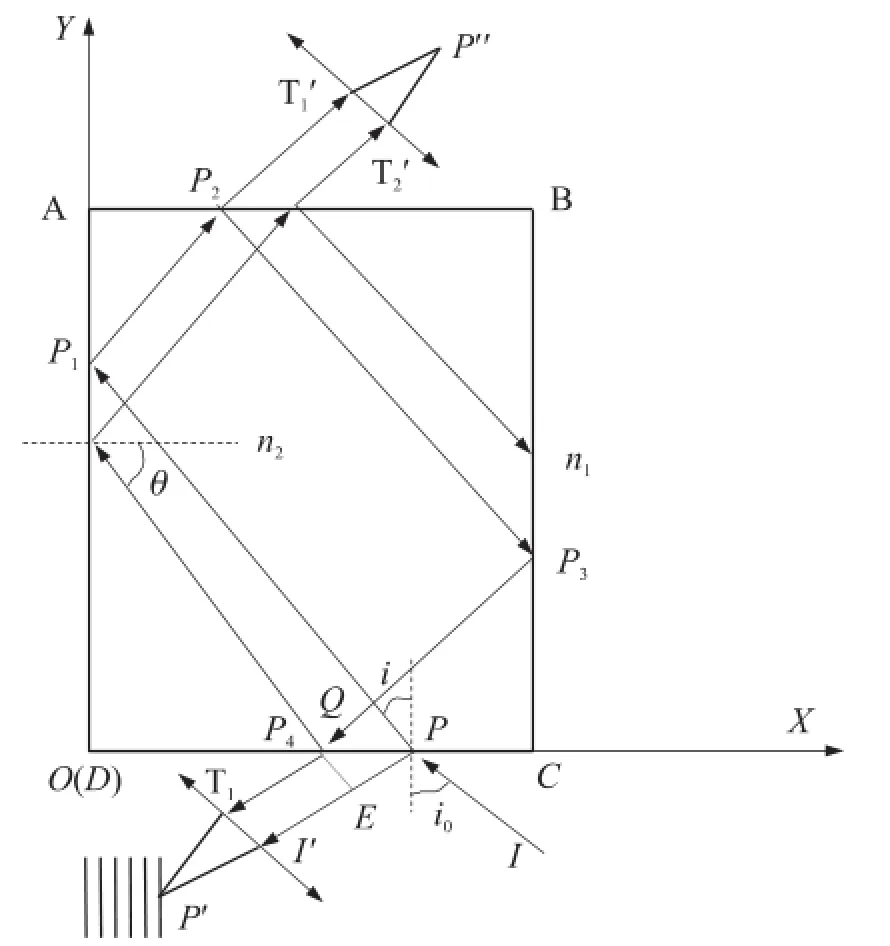
图2 矩形腔等倾干涉
射线集合具有如下特点:
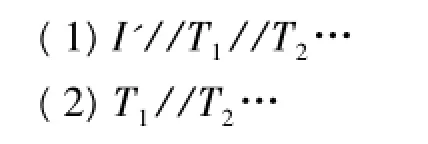
(3)反射线集合{I',T1,T2…}和透射线集合{T1,T2…}中,相邻的两束光线的几何(表现)光程差都相等,且仅依赖于入射角i0,而与入射位置P点无关;
由此可知四边形QP1P2P3形成一个平行四边形,它的周长为:

而光线在矩形腔内路线PP1P2P3P4的长度为

从P4点做反射光线I'的垂线,垂足为E,由于ΔQPP4为一个等腰三角形,则有

又由于PE=PP4sini0;n1sini0=n2sini,则I',T1…之间的光程差为
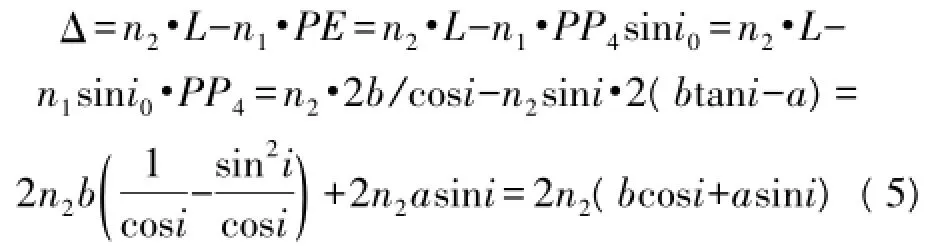
考虑到光线反射过程中的相位突变问题,可以在相位差中加入一个偏移相位φ0,则得到实际相位差为δ=(2π/λ)Δ+φ0=(4π/λ)n2(asini+bcosi)+φ0(6)式中:AB=a,BC=b,λ是入射光的波长。
这里,我们对该系统进行改进,在矩形腔等倾干涉的基础上结合F-P干涉进行联合测量,可以同时精确地测量两个方向的位移。具体装置如图3所示。

图3 光学干涉装置
图3中,干涉系统由两个L型的直角板组成,Y方向上的两平板内侧为反射平面镜,X方向的两平板为光学半透膜,涂有能量反射率为R的薄膜,I1和I2为两束入射光,I1的入射角为i0=i,I2的入射角为i'(零角度附近)。L1和L2构成矩形,L1固定不动,L2可以沿着X轴和Y轴两个方向移动,但不能转动。由以上讨论,可以得到干涉条纹S1和S2中相干光线的相位差分别为:
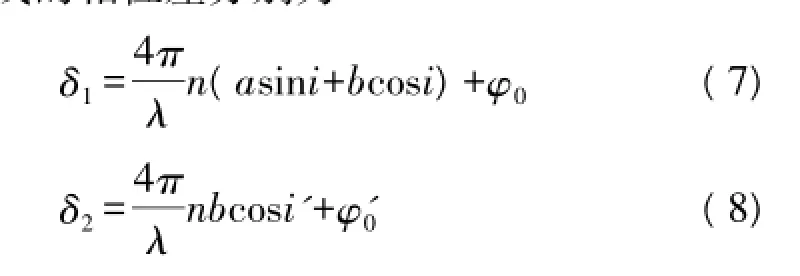
当L2L直角板移动时,a、b会产生变化,进而光程差发生变化,出现干涉条纹移动现象。条纹移动过程中相位差的变化量为:
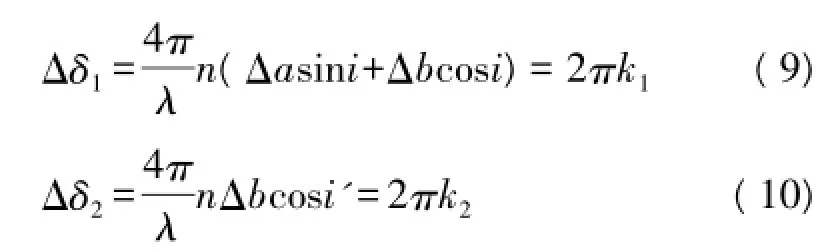
式中:Δa,Δb为LL型板分别在X和Y方向的位移,k1和k2(k1,k2=1,2,3,…)为S1和S2条纹移动的数目。那么就可以根据条纹移动的信息得到位移的信息.联立解上面两式可得Δa,Δb的值为

由此可得,所测得的二维位移为

2 信号采集与处理
2.1 CCD驱动电路设计
CCD是一种新型的光电转换半导体器件,能够把光学影像转化为模拟电流信号,电流信号经过放大和模数转换,实现图像的获取、存储、传输、处理和复现[9-10].这里我们采用TCD1703C型号CCD来实现光电信号转换。
所设计的驱动电路必须满足TCD1703C脉冲时序要求才能使CCD正常工作;CPLD是可编程的与域门阵列以及宏单元构成;CPLD能够提供简单可预测的时序模型信号,且在高频率工作时保持良好的性能,同时又有灵活可变的输出引脚,速度快,功耗低,使用方便,保密性好等特点,故选择CPLD芯片来实现CCD驱动电路[11-12]。设计思路:①将输入频率为1 MHz的方波脉冲进行2、4分频,得到0.5 MHz、0.25 MHz的方波脉冲,其中0.25 MHz的方波脉冲作为时钟信号Φ1,反向后得到时钟脉冲Φ2;②将0.5 MHz、0.25 MHz的方波脉冲相与,形成占空比为1∶3,频率为0.25 MHz的复位脉冲RS;③将复位脉冲RS延迟产生另一个籍位脉冲CP;④对移位脉冲进行计数,每达到预设值时产生一个SH脉冲。
根据以上程序,在Max+plusll上经过设计输入,然后选择型号为EPM7128SLC84-15的器件,并进行引脚锁定,经过器件编译并进行仿真后,得到如图4所示的仿真结果。从仿真结果可观察到CCD所需的复位脉冲、移位脉冲和采样脉冲,三者间的时序关系完全符合线阵CCD的要求。这表明理论上这个方案的可行性已获证实。为了对方案进行实际测试,将源程序编译后通过JTAG接口下载到实际CPLD硬件芯片中,通过示波器检测,得到与仿真图完全相同时序的脉冲。这也表明该CCD驱动电路方案完全可行。
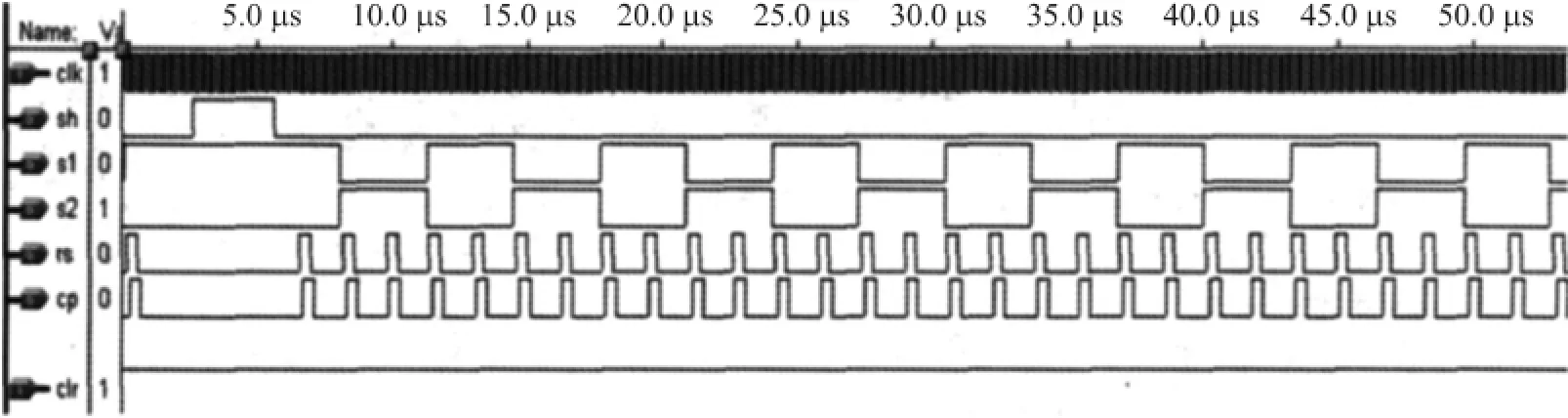
图4 CCD驱动仿真波形
2.2 仿真电路设计与实现
将CCD转换之后的电信号通过单片机组成的仿真电路进行模数转换、存储等预处理[13-14]。仿真电路可在文献[7]的仿真电路基础上修改调整。我们选用了型号为AT89C51的单片机,在接收到经CCD电路模数转化的电信号后,储存在片外RAM,使用异步串行通信方式,设定传输波特率为2 400 bit/s,将数据传输给PC机。文献[8]为本文所作的仿真实验运行结果显示,系统工作正常,达到预期设计的效果。
3 LabVIEW平台设计
LabVIEW(Laboratory Virtual Instrument Engineering)是美国NI(National instrument)公司研发的一种功能强大的图形化程序开发环境,是一个面向终端用户的开发工具。VISA(Virtual Instrumentation Software Architecture)名为虚拟仪器软件结构框架,是应用于仪器编程的标准 I/O应用程序接口(API),其本身没有编程能力,它是一套通过调用底层的代码来控制硬件的库函数,且调用过程中不用考虑器件是什么类型的接口[14]。本系统采用VISA程序库来实现单片机与PC机的串行通信,所设计LabVIEW平台程序框如图5所示。
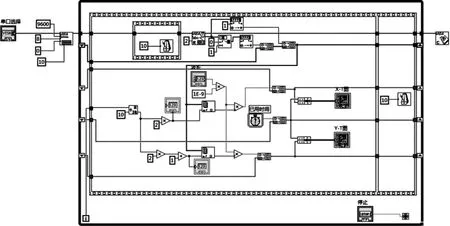
图5 LabVIEW平台程序框图
数据传输过程中,数据处理后的X和Y两个方向的位移信息采用数组奇偶项自动读取。读取的数据按照由移位寄存器放进数组的方式进行,显示模块通过捆绑数据数组与时间数组来实现。首先通过对i值进行“i×2”和“i×2-1”的操作,以获取了奇数和偶数,进而连接索引数组,将数组里面的奇数项和偶数项读出来,送到后面的处理显示模块进行实时显示。该方法具有传输数据准确,采集速度高,而且不用手动切换等特点。
对于不同波长的光,包含的位移信息不同,所以,在系统中加入了波长输入点。运行前要先设置串口,串口初始化之后根据系统采用的实际光填入波长。
运行之后可以实现对X和Y方向上位移的同时显示,据图6可以看出,LabVIEW平台的前面板可以设计的和实际测量仪器类似的样子,有很强的直观性。前面板主要包括两个表框,一个是X方向上的位移时间图,一个是Y方向上的位移时间图像。
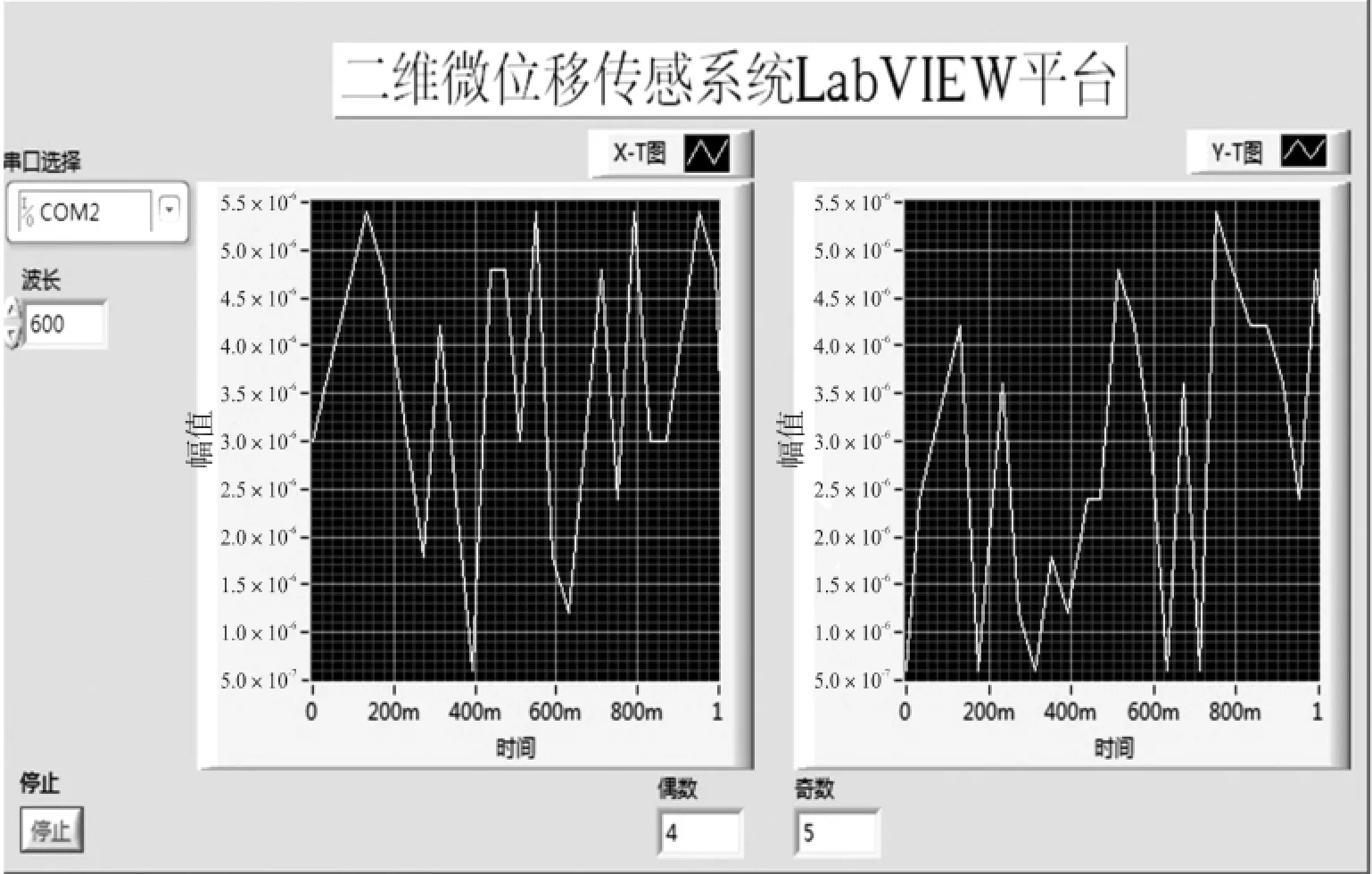
图6 LabVIEW平台前面板
运行结果显示,该系统可以很好的实现两个方向上的微位移的测量与显示,证明了设计方案能够很好地实现对被测物体的二维微位移的精密测量与显示功能,
同时也展示了PC机和单片机串行通信的一般方法,以及LabVIEW对数据的处理和显示,使得单片机和PC机的应用能够更加协调地结合在一起。本系统操作简单,可视性强,系统运行良好,符合预期目的。
4 结论
本文基于矩形腔等倾干涉原理,利用干涉条纹光强随空间位移周期性变化的特点,设计了一种使用CCD光电转换技术的二维微位移传感系统。本文对整个二维位移传感系统的控制电路的硬件与软件进行了比较完备的设计,初步建立了一套分辨率为微米级(10-6m~10-7m),并能进行远程通信的小型、自动化监测系统。该系统的优点,也是其特色之处在于能够同时检测两个方向上的位移,而不需要在检测一个方向的位移的同时还要锁定另外一个方位不动。其所具有的精度高、成本低、性能可靠、体积与功耗小、携带与安装使用方便等特点,使其可在水利工程检测维护、大型建筑安全维修、精密加工中的实时控制等方面发挥很大的作用,拥有广阔的应用前景。但是,在系统的设计过程中,简化了部分问题,也存在需要进一步改进的一些地方,比如时间信息的获取和光电电信号的转换不是同时进行的,存在一定的时间差;在光学干涉装置设计环节,两个L型的平面板之中有一个是固定的,另外一个是随被测物体移动的,随物体移动的平面板在移动的过程中只能够平动,而不能发生转动,已保持其矩形腔构型;在LabVIEW平台的设计过程中,前面板的功能显示过于简单,在后续的设计过程中可以作更细致的优化调整,使位移的显示更加详细和生动;还可以加进对瞬时移动速度的显示功能,这样就能同时实现二维微位移的速度的实时监测。另一方面,还可以考虑在本二维微位移传感系统的基础上,经过改进,进一步实现三维位移传感测量。这也是我们未来的一个重要的研究方向。
[1] 胡摇欢,余摇永,王摇慧,等.HHT算法在压电陶瓷驱动器的微纳米位移传感器中的应用[J].传感技术学报,2014,27(4):456-463.
[2] 孙凤鸣,傅星,朱振宇,等.基于MEMS的微位移传感器及其应用研究[J].传感技术学报,2013,26(2):293-297.
[3] 马静华,葛运建,吴仲城,等.一种二维微位移平台测量系统的研究[J].传感技术学报,2005,18(4):739-744.
[4] 方平,丁凡,李其朋.基于线阵CCD的新型微位移传感器的研究[J].传感技术学报,2006,19(1):74-78.
[5] Zhou Guoquan,Sui Shixian.Equal Inclination Interference Principles in a Rectangular Cavity and in an Isosceles Wedge[J]. Optical Engineering,1994(3):2922-2926.
[6] 周国全,隋士先.对角式与三角式光学干涉仪设计原理[J].武汉大学学报:工学版1993,26(3):330-335.
[7] 周国全,张斯磊.基于等倾干涉的二维微位移光学传感测距系统[J].武汉大学学报:理学版,2010,56(5):609-613.
[8] 孙东振.一种基于矩形腔等倾干涉原理的新型二维微位移传感器设计[D].武汉:武汉大学,2014.
[9] 黄元庆.现代传感技术[M].北京:机械工业出版社,2008:32-46.
[10]胡汉才.单片机原理及其接口技术[M].北京:清华大学出版,2004:12-56.
[11]刘君华.基于LABVIEW的虚拟仪器的设计[M].北京:电子工业出版社,2003:56-78.
[12]吕向峰,高洪林,马亮,等.基于LabVIEW的串口通信研究[J].理论与方法,2009(12):28-32.
[13]郭龙钢,王宇炎.基于LABVIEW的单片机串口数据采集系统[J].自动化技术与应用,2009(11):129-131.
[14]梁芳.基于LabVIEW的多路声信号实验系统设计[D].太原:中北大学,2011:25-51.

周国全(1965-),男,博士,副教授。1986年毕业于北京大学物理系,获理学学士学位,1993年获武汉水利电力大学(现为武汉大学工学部)工学硕士学位(电磁场与光电子技术方向),2008年获武汉大学理学博士学位(场论与粒子物理方向)。长期从事《电磁场与电磁波》、《电磁学》、《数学物理方法》和《相对论》的教学。主要学术成就是发现了矩形腔与等腰劈的等倾干涉现象与原理。相关成果发表于国际光学工程协会(SPIE)主办的《Optical Engineering》,进入EI索引。先后发表科研和教学论文40余篇,其中进入SCI索引的论文5篇,进入EI索引的论文5篇。2008年出版教材《电动力学》(副主编),业余醉心于古典文学与诗歌艺术,曾出版诗集《行吟者》。研究方向为电磁场与光电子技术、场论与非线性可积方程,zgq@whu.edu.cn。
A Novel Two-Dimensional Micro-Displacement Sensor Based on LabVIEW Platform*
ZHOU Guoquan1*,SUN Dongzhen1,2,PENG Huoran1
(1.School of Physics and Technology,Wuhan University,Wuhan 430072,China;2.Haicang Branch of Xiamen No.1 High School,Xiamen Fujian 361000,China)
Based on the principle of equal inclination interference in a rectangular cavity,a novel two-dimensional micro-displacement sensor is designed.By use of Charge Coupled Device(CCD)technology and microcontroller,the signal collection,optoelectronic transform,information storage and data communication are completed.The visual display is realized by PC system and LabVIEW platform.The experimental results of fidelity simulation demonstrate that high sensitivity,up to level of 1 μm~0.1 μm,can be achieved.Due to its simplicity,inexpensiveness,and convenience of operation,it is worthy of studying and spreading further in many application fields,such as monitoring the safety maintenance of key water conservancy projects and large buildings,and the real-time control of displacement in precision machining.
displacement sensor;rectangular cavity;optical interference;equal inclination interference;CCD;Lab-VIEW;two-dimensional micro-displacement EEACC:7230
TP212.1;O436.1
A
1004-1699(2015)04-0607-06
10.3969/j.issn.1004-1699.2015.04.026
项目来源:国家自然科学基金项目(10775105)
2014-07-01 修改日期:2015-01-26
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
小福尔摩斯(2019年2期)2019-09-10 07:22:44
中学生数理化·七年级数学人教版(2019年4期)2019-05-20 10:03:44
小学生必读(低年级版)(2019年9期)2019-04-13 13:09:42
小学生必读(低年级版)(2019年10期)2019-04-13 13:07:32
电子制作(2018年23期)2018-12-26 01:01:26
中学生数理化·八年级数学人教版(2017年4期)2017-07-08 13:04:56
娃娃画报(2014年9期)2014-10-15 16:30:52