线扫描激光传感器在动平衡检测设备中的应用
2015-11-17 06:20隋勇
橡塑技术与装备 2015年2期
隋 勇
(青岛科技大学自动化学院,山东 青岛 266042)
线扫描激光传感器在动平衡检测设备中的应用
Applications of line scanning laser sensor in dynamic balancing test equipment
隋 勇
(青岛科技大学自动化学院,山东 青岛 266042)
介绍了线扫描激光传感器的工作原理及其在动平衡检测设备中的实际应用情况。事实结果证明,线扫描激光传感器应用于轮胎检测设备中,可以更加直观的加强轮胎缺陷识别,轻易的标识出轮胎自身表面缺陷位置,大大提高了数据的准确性以及明确了轮胎制作工艺改进的方向。
偏心度;线扫描激光传感器;动平衡
随着对轮胎质量要求越来越严格,偏心度作为轮胎出厂前一项重要检测指标,受到越来越多国内外轮胎生产厂家的重视。轮胎偏心度测量是指通过激光传感器对轮胎表面进行检测,检测出轮胎自身表面由于成型或硫化等原因造成表面凹凸不平等缺陷的过程。对轮胎偏心度的检测可以及时发现轮胎缺陷,防止不合格轮胎出厂,并通过对轮胎缺陷的分析及时发现轮胎生产工艺过程中出现的问题,从而提高轮胎质量。
1 线扫描激光传感器的工作原理
所谓线由点构成,线扫描激光就是由一系列的点激光组成,线扫描激光传感器可以同时扫描一条线,激光线发射到物体上,通过反射覆盖检测整个物体表面,即可立体的检测处该物体表面形状,与点激光相比,工作原理是类似的,首先介绍一下点激光传感器的测试原理。如图1所示。
由几何关系可以得到:
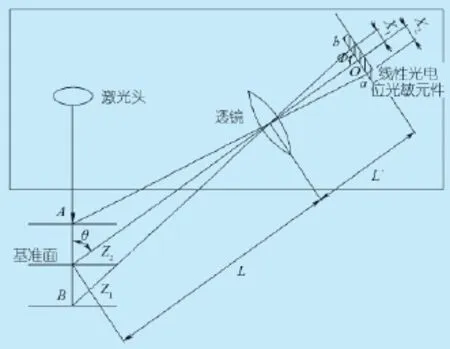
图1 激光实现采集距离的原理图

式中,L为物体表面到透镜的距离,L'为透镜到线性光敏元件的距离。当θ=45°,φ=90°,且x1、x2远小于Z1、Z2时,可以得到物体任意移动距离与其像点偏移量的关系:

由(图2)线激光的发射可知,只有在最中心的光线才是垂直于物体的,越往两侧移动,光线与物体的倾斜程度越大,由此可知,每一点所检测的实际有效距离为:


图2 线激光传感器位移数据修正图
2 偏心度测量指标和含义
轮胎偏心度测量是指轮胎在匀速旋转状态下,利用传感器测量轮胎表面轮廓及凹凸。轮胎偏心度主要包括胎面偏心度和上、下胎侧偏心度。胎面偏心度是指轮胎直径方向的偏心程度,一般由最大半径与最小半径之差来表示,即偏心度E1=Rmax-Rmin。胎侧偏心度是由指在轮胎胎侧方面向厚度的不均匀造成的,它是轮胎侧面最大厚度与最小厚度之差。当激光传感器测量到轮胎胎面的距离,轮胎旋转一周的最大位移变化量即为轮胎胎面偏心度。同理,当轮胎旋转一周,传感器到轮胎侧面的位移变化量E2=Hmax-Hmin即为胎侧偏心度。
3 线扫描激光传感器在轮胎动平衡检测设备中的应用
我们所采用的线激光传感器,主要由以下两部分组成。
3.1 激光探头
我们共使用了3个激光探头对轮胎胎面、上胎侧及下胎侧进行测量,如图3所示。
图3 激光实现采集效果图
3.2 控制器
将现场信号处理后通过有线网络统一发送至上位机电脑进行数据处理分析。
4 线扫描激光传感器使用载体——动平衡设备
测试条件:轮胎充上额定气压,不同的规格轮胎可以根据不同的需求设定;有坚固且稳定的旋转中心,按照设定的速度旋转;由传感器对轮胎表面形状进行采集处理,并自动计算出轮胎表面缺陷等级。
我们采用的线激光传感器,对轮胎胎面及胎侧缺陷进行检测,并且已将线激光传感器成功应用于实际动平衡检测设备中。对轮胎表面偏心度进行检测,首先是要保证轮胎固定于一高精度旋转平台上,可以在轮胎内部充入额定稳定气压,然后开启激光传感器激光对轮胎表面进行匀速检测,待匀速旋转检测出一周的轮胎曲线信息后,便可以对轮胎进行数据分析。而动平衡设备,恰恰能够提供这样一个测试环境,动平衡设备可以在动平衡测试之前或测试之后,调整旋转主轴至一稳定速度后,进行偏心度测试。
5 线扫描激光传感器在实际中应用的优势
点激光传感器,已经大量的投入到设备的使用当中,但是点激光扫描的缺陷,也开始逐渐显现出来。
做为点激光传感器,是将激光传感器发射的激光直接照射在轮胎表面上的一点上,并保持激光传感器静止,通过轮胎的旋转对轮胎上的同一位置实现远近距离的比较,从而实现轮胎表面缺陷的检测。点激光传感器对于轮胎表面缺陷测量位置的选择需要很高的要求,即要求尽量的避免采集到轮胎表面的花纹和商标字体,这对操作人员有很高的要求,但是即使这样也很难完全避免误将花纹和字体做为缺陷来处理,同时对于轮胎缺陷的位置,一般会出现在轮胎的胎肩位置,但是我们选择的位置不一定正好能够采集到缺陷上,所以就存在着检测漏洞即盲区存在。线激光传感器应用于轮胎检测设备中,在国内尚为首例,我们已经成功研发并且应用于现场设备中。相对于点激光传感器线激光传感器具有以下应用优势。
5.1 测量范围宽
线激光传感器等同于上百个个点激光传感器,它射出的激光是一条线,因此可以测量一片范围内的所有点,即同步采集后经软件还原,再以颜色的深浅来区分轮胎表面的高低,最终就可以3D效果呈现在给大家。而正因为如此,在轮胎旋转测量时,就可以同步采集到轮胎表面的一个环形,实现对轮胎表面整个可能出现缺陷的位置进行覆盖式扫描采集,不会因为只测量一个点而漏掉没有扫描到的轮胎缺陷。
如图4所示分别通过三个激光探头扫描到的轮胎表面图像信息,其中利用颜色深浅区分出探头离轮胎距离的远近,颜色的变化表明轮胎自身表面的变化。

图4 线扫描激光传感器扫描轮胎效果图
5.2 成像直观
点扫描激光传感器只能采集到一条曲线,并不能看出所处的轮胎位置。线扫描激光传感器通过上位机软件对信号进行采集处理后,可以直观的体现轮胎表面的特征,而且可以通过计算标识出轮胎表面的鼓包、凹陷和一次谐波,在图片上可以更形象的看出所在位置。通过对轮胎的条码信息保存相对应的图片信息,尤其是有轮胎缺陷的轮胎,可以通过调用轮胎条码信息查询缺陷图片,分析缺陷原因,即使在没有打标的情况下,也能查找出轮胎的外观缺陷位置,从而进行有针对性的处理对策。
图5为上、下胎侧及胎冠的整个扫描信息,将上、下胎侧及胎冠分别以编码器Z脉冲为数据采集零点,将采集到的整个信息以平铺的形式展开即为以上形式。
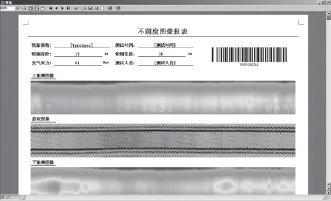
图5 线扫描激光传感器扫描轮胎后图形报表
5.3 测试精度高
根据我们以往的设备应用,作为检测设备的几何尺寸测量,我们之前使用的均为点激光传感器,而我们最新采用的线激光传感器,测试精度明显比点激光传感器高很多。
我们采用了同一条轮胎,在同样的测试条件下,分别用点激光传感器和线激光传感器对此轮胎进行测试,测试数据如表1表2。
如图5及表1所示,图5为点扫描激光传感器测试的偏心度测试数据,表1为线扫描激光传感器测试的偏心度测试数据。一般以点扫描激光传感器测试轮胎时,上、下胎侧及胎面的测试数据精度标准偏差为0.1以内,测试鼓包、凹陷的数据精度标准偏差为0.5,而自从更改为线扫描激光传感器后,上、下胎侧及胎面的测试数据精度由标准偏差为0.1以内提升为0.5以内,而测试鼓包、凹陷的数据精度由原先的标准偏差0.5提升到了0.02以内。数据精度有了大幅度提高。

表1 点扫描激光传感器测试数据表

表2 线扫描激光传感器测试数据表
6 结论
线激光传感器在轮胎偏心度中的应用,既提高了轮胎偏心度的准确速度,提高了设备的测量效率,又保护了轮胎免受划伤及防止传感器变形。通过对轮胎偏心度的测量可以及时发现生产中的存在的问题,从而能够改善提高轮胎质量。
[1] 刘金琪,高保成,田永林. 汽车轮胎偏心度测量及其控制系统[J]. 电气传动自动化,2002,03.
[2] 谭宁. 轮胎偏心度测量机测量数据处理[J]. 轮胎工业,2005,(8): 493~495.
(XS-05)
TQ330.4
1009-797X(2015)02-0058-04
B
10.13520/j.cnki.rpte.2015.02.009
隋勇(1982-),男,就读于青岛科技大学自动化学院。
2014-04-01
猜你喜欢
轮胎工业(2022年8期)2022-11-26
一重技术(2021年5期)2022-01-18
轮胎工业(2021年8期)2021-12-26
轮胎工业(2021年4期)2021-12-25
快乐语文(2018年7期)2018-05-25
制造技术与机床(2017年5期)2018-01-19
科学与财富(2016年35期)2017-04-20
小说月刊(2015年9期)2015-04-23
人生十六七(2015年5期)2015-02-28
组合机床与自动化加工技术(2014年9期)2014-03-01