空空导弹网络化协同制导作战模式
2015-11-15 05:13芮同林
航空兵器 2015年5期
王 君,芮同林,李 进,刘 曙
(1. 空军工程大学 防空反导学院,西安 710051;2. 陕西黄河集团设计研究院,西安 710043)
0 引 言
面对未来战场可能出现的异常复杂群体作战环境,不仅要求导弹实现对自身的精确制导,还应配合其他导弹,完成多种作战任务,使己方整体作战效能最大化。如何将各个独立作战单元集成作战体系,通过合理的资源分配和调度、信息资源的有效运用以及传感器与发射装置配对等,实现各作战要素间战场态势感知共享,从而把信息优势转变为决策优势和行动优势,最大限度地发挥多枚导弹的整体作战效能,不仅将极大地提高导弹的突防能力,还能够完成单枚导弹不易完成的任务,如实现战术隐身、增强电子对抗能力和对运动目标的识别搜捕能力等[1-2]。
多导弹协同作战以调整作战理念、适应未来作战环境为目的,打破作战过程中各导弹之间没有任何联系与合作的传统思想,将参战导弹构成一个作战网络,在网络指控中心的调控和管理下,各导弹间互相通信、信息共享、取长补短,以取得整体的胜利为最终目的,能够极大提升拦截作战效率[1],是未来导弹发展的方向之一。
协同制导作为协同作战的关键技术之一,是实现网络化条件下精确打击的前提。论文将以未来空空导弹协同制导为背景,构建空空导弹协同制导体系与战斗机编队体系结构,提出协同作战任务需求;通过探讨接力制导、他机制导、远程数据交战、航迹合成、合成跟踪等五种典型协同作战模式,为空空导弹网络化协同作战效能的提高提供技术基础。
1 协同作战体系结构
考虑新型空空导弹在未来战场上可能的作战样式、作战目标和作战环境,采用“网络中心战”思想,构建未来网络化空战体系结构,如图1 所示[3]。该网络化作战系统,在空中预警指挥飞机和地面指挥中心的统一指挥控制和协调下运行,多个战斗机编队在电子战飞机编队的掩护下执行对敌空中目标协同攻击任务。

图1 网络化空战体系结构示意图
为了保证网络化空战的有效实施,对于飞机和导弹之间采用双向数据链的中远程空空导弹,根据协同制导作战使用模式,考虑弹载双向数据链主要有如下功能:
(1)可提高末制导截获概率,并满足导弹在较远距离攻击隐身目标的需要,这对于攻击隐身飞机和巡航导弹目标非常有意义。
采用弹载双向数据链(可将导弹位置数据回传),同时在中制导采用惯性导航的情况下,空空导弹和发射载机可使用同一坐标基准,且弹载惯导的位置误差基本可消除,这将大大提高末制导捕获概率。由于导弹采用了弹载双向数据链,先进战斗机采用的有源相控阵雷达可以实现对导弹的应答式跟踪,载机雷达可以实现对目标和导弹的同时跟踪,并获得高精度的相对角度信息,进而有利于提高导弹的中、末制导交班成功概率。
(2)可以在座舱显示屏上显示导弹的飞行轨迹,飞行员更易判断空战态势。导弹导引头捕获目标后可把目标信息传回载机,载机可视情况及早脱离,避免因过长时间使用机载雷达照射目标不能及时脱离而被对方击落的危险,提高了载机的生存能力。
(3)导弹将目标的特性(包括目标反射特性、电子干扰特性)、目标的机动情况甚至命中目标的信息传回发射导弹的载机,从而可提高导弹的抗干扰能力,并及时做出目标毁伤情况评估,避免对单个目标进行重复攻击。
(4)可适应网络化作战的需要,便于将“提供目标指示”的功能转交给己方其他飞机,以利于他机制导。
为实现协同制导,需要在载机上加装协同制导处理器(Cooperative Guidance Processor,CGP)设备,CGP 是实现协同制导信息处理的关键设备,负责机载雷达的目标测量信息和状态信息的综合处理,使其在复杂战场环境条件下满足协同制导要求。利用CGP,可以接收网络化作战系统内所有传感器的目标信息,负责数据的融合处理、协同定位、传感器管理建议工作,进行目标数据融合,生成统一目标信息场。网络化作战系统中,CGP 提供来自多个信息源经过高精度协同制导处理后的目标数据,火控系统能够利用这些数据进行指挥决策和制导信息的解算。
一个战斗机编队的体系结构如图2 所示。在特殊情况下,长机的网络化指控中心(网指中心)可以接替预警指挥飞机和地面指挥中心的部分指挥控制和协调的功能,网指中心负责多机之间的作战协调和协同制导决策。网指中心可以位于任何一个长机中,作战之前根据需要指定其中一个为网指中心,同时指定一个或多个僚机为网指中心备份节点,以实现接替指挥和动态重组。
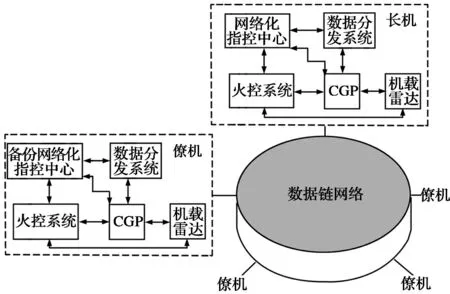
图2 战斗机编队体系结构示意图
对于目标测量信息,CGP 完成以下处理任务:
(1)接收并处理每一个信息源的目标信息;
(2)进行目标测量数据的同一性识别,完成航迹关联和数据融合处理;
(3)实时进行协同机载雷达间的系统误差估计;
(4)对目标信息进行误差补偿,实现利用远程数据进行导弹制导;
(5)利用多雷达的测量信息,实现分布式多传感器集中滤波处理,并向机载雷达提供目标信息,使机载雷达利用该信息进行辅助跟踪;
(6)在干扰、隐身等复杂战场环境条件下,提出协同机载雷达资源调度辅助决策建议,供飞行员决策。
对于目标状态信息,CGP 完成以下处理任务:
(1)对目标敌我属性进行综合处理,确定目标的敌我属性;
(2)对目标类型属性进行综合处理,确定目标的类型属性;
(3)在同一性识别和属性综合处理的基础上,对目标批号进行统一管理,为飞行员提供准确一致的空情态势;
(4)对系统航迹的质量进行综合判断(如是否满足导弹制导要求),为作战决策提供依据。
2 协同作战模式
结合空空导弹协同作战结构特点,可有以下几种典型作战模式:
(1)接力制导模式
在空战过程中,本机利用机载雷达跟踪的目标信息对导弹进行参数装订,并发射导弹。当本机在中制导过程中受到敌方空空导弹的威胁或其他原因必须放弃制导时,可通过科学决策将中制导任务交接给网络化作战系统内的其他飞机(以下简称他机),他机根据自身跟踪的目标信息接替制导,继续完成对指定目标的攻击任务,这种作战模式称为“接力制导”。[4]
在接力制导作战模式中,应在网络化作战系统指挥中心的统一指挥调度下,将目标-导弹在战斗机之间进行交接。其关键是要解决他机的选择和目标-导弹在机载雷达间的交接问题,可用实现目标-导弹数据顺利交接的成功概率来评价接力制导作战模式的处理结果。
该作战模式适用于机载雷达对抗反辐射导弹攻击时,将反辐射导弹来袭方向的目标-导弹转移到其他火力单元,或受攻击的机载雷达实施静默时,也适用于在复杂战场环境条件下对远程目标的拦截。
对于目标信息的处理,接力制导处理模式与航迹合成处理模式相同,但接力制导处理模式增加了导弹信息处理,如图3 所示。

图3 接力制导处理模式的导弹通道信息处理流程
(2)他机制导模式
在空战过程中,他机跟踪的目标信息通过机间数据链传输给本机,本机利用他机跟踪的目标信息进行解算,满足发射条件时,给导弹装订目标参数、发射导弹,并将导弹的相关初始信息通过机间数据链传递给他机,由他机进行中制导,这种作战模式称为“他机制导”。[5]他机制导功能的实现需要机弹数据链满足要求,而且对机间数据链也有一定的要求。
本机可大胆进入理想发射阵位,发射导弹后脱离,有利于提高本机和他机的生存性,且具有很大的战术欺骗性。本机也可采用雷达静默方式进入理想发射阵位,具有较好的隐蔽性。他机制导作战模式的实施同样应在网络化作战系统指挥中心的统一指挥调度下完成。其关键是要解决他机跟踪目标信息的解算和导弹与他机间数据链的建立问题,可用实现他机顺利截获导弹的成功概率来评价他机制导作战模式的处理结果。
采用他机制导方式可在空战中实施协同作战,实现隐蔽攻击。战时可由处于编队后方的雷达探测、跟踪空中目标,并通过高速数据链将目标信息传递给前方载机。当满足发射条件后,载机发射空空导弹进行攻击。导弹的中制导修正功能可由发射载机完成,也可由后方的飞机来完成。这种攻击方式可使照射方向和攻击方向分离,令敌方把雷达处于辐射状态的飞机视为威胁,而忽视了前方雷达处于静默状态的飞机,从而增加了战术的突然性,容易突袭得手。如果前方的飞机具有较高的隐身性能,这种空战方式效果更佳。
(3)远程数据交战模式
本机自身不能跟踪目标或跟踪目标航迹质量不满足制导要求,但具备较好的拦截目标条件,指控系统射击诸元计算、导弹装订参数和制导指令形成采用CGP 产生的数据,直至完成拦截过程的作战模式称为“远程数据交战”,适用于对隐身目标或干扰目标进行拦截。
在远程数据交战模式下,至少要两个或更多的战斗机参与交战,其实施同样应在网络化作战系统指挥中心的统一指挥调度下完成。关键是机载雷达间相对系统误差的消除和补偿问题,可用“系统误差补偿水平”指标来评价远程数据交战作战模式的处理结果。
相对系统误差补偿水平是在远程数据交战状态,CGP 对支援目标信息与本机跟踪同一目标真实目标之间的角度、距离测量相对系统误差统计量,在典型空域内,用概率表示:

(4)航迹合成模式
本机在制导信息的形成过程中,利用多个独立跟踪的机载雷达测量信息,经融合处理,这种作战模式称“航迹合成”。[6-7]
在航迹合成作战模式中,利用现有雷达的输出信息实现目标信息的融合处理,该方式可实现在单部雷达处在两维、三维或丢失目标的情况下,仍可通过数据分发系统得到其他雷达测量数据,实现高精度目标信息融合处理。机载雷达对目标的跟踪处于自主控制状态,当雷达丢失目标时,按照CGP 提供的目标指示信息重新进行搜索、截获。该方式适用于对干扰目标进行拦截作战等情形。
航迹合成信息处理的重点在于实现多传感器、多目标信息的航迹融合。在CGP 中,航迹合成处理的结果用“连续航迹维持能力提高”指标来评价。该指标的定义:在特定的时间内,利用多个机载雷达对给定目标进行协同探测形成的系统航迹长度与本机机载雷达跟踪航迹长度之比。
(5)合成跟踪模式
本机在制导信息的形成过程中,利用多个他机的机载雷达测量信息进行集中式滤波处理,形成对本机机载雷达跟踪目标的信息支持,从而使本机单部雷达能完成对确定目标的跟踪和拦截,这种作战模式称为“合成跟踪”。[8]
“集中式滤波”是指将选定的他机机载雷达所获取的未经滤波的单次测量数据都传送到本机CGP 进行统一滤波处理。在集中式滤波结构下,滤波器可以得到所有传感器传送来的原始量测数据,数据量最大、信息最完整,所以往往能够提供最优的滤波性能。
合成跟踪作战模式中,通过对机载雷达的管理,在单部机载雷达丢失目标信息时,利用CGP提供的信息进行辅助跟踪,从而维持对目标的探测和跟踪。CGP 通过处理机载雷达未经滤波,但经过单站雷达补偿的测量信息,实现分布式多传感器集中滤波。该方式适用于对强背景干扰条件下制导信息的处理,也适用于对隐身飞机、小目标作战时制导信息的处理,特别适用于对复杂对复杂环境下要害目标发射导弹的情况。
3 结 论
网络中心战是信息技术在军事领域应用的必然结果,网络化作战是网络中心战的具体应用。本文以空空导弹网络化作战协同制导为背景,结合相关文献,从协同作战体系结构、任务需求、典型协同作战模式等方面对空空导弹网络化协同制导作战模式进行阐述与分析,可作为相关技术发展参考。
[1]张克,刘永才,关世义. 体系作战条件下飞航导弹突防与协同攻击问题研究[J]. 战术导弹技术,2005(2):1-7.
[2]胡正东,林涛,张士峰,等. 导弹集群协同作战系统概念研究[J]. 飞航导弹,2007(10):13-18.
[3]王君,张蓬蓬,梁文波,等. 多弹协同攻击网络化作战系统体系结构研究[J]. 航空兵器,2011(6):10-14.
[4]代进进,李相民,黎子芬. 舰空导弹接力制导交接班建模与仿真[J]. 弹箭与制导学报,2012,32(3):1-6.
[5]雷文太,王谦喆,周滨. 基于GPS 的空空导弹它机制导技术[J]. 弹箭与制导学报,2009,29(4):16-18.
[6]张艳红,刘光斌,李琳琳. 航迹合成中的资源协同选择策略[J]. 电光与控制,2012,19(10):13-16.
[7]宗华,宗成阁,朱荣花,等. 一种基于协同作战能力的航迹合成方法[J]. 系统工程与电子技术,2007,29(11):1842-1846.
[8]张学义,郑学合,卓志敏. 制导雷达网合成跟踪性能仿真研究[J]. 现代防御技术,2009,37(6):91-95.
猜你喜欢
小哥白尼(军事科学)(2021年1期)2021-07-16
科学与财富(2021年36期)2021-05-10
小哥白尼(军事科学)(2020年12期)2021-01-18
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年6期)2016-11-16
军事运筹与系统工程(2016年4期)2016-07-10
北京航空航天大学学报(2016年4期)2016-02-27