
基于双站距离空间投影的多目标定位方法
2015-11-15 05:13何蜀丰张晓玲师同彦陈思远张博军
航空兵器 2015年1期
何蜀丰,张晓玲,师同彦,陈思远,张博军
(电子科技大学 电子工程学院,成都 611731)
0 引 言
近年来,传感器网络目标定位问题受到广泛关注,涌现出多种定位方法[1]。基于到达时间差(TDOA)定位方法利用信号到各个接收传感器的时间差进行定位,是传感器网络定位的经典技术[2-4]。基于TDOA 的定位技术可用一系列非线性方程来表征,通过解算非线性方程组获得目标的位置[5]。然而,对于多个目标条件下的目标定位,因为噪声及杂波干扰,传统TDOA 目标定位方法在目标定位前,必须从传感器网络多目标(包括噪声及杂波)回波信号中区分出各个目标的回波信号,才能正确建立各目标与传感器的位置方程组,这一过程中对多个传感器中多目标回波信号的匹配被称为多个目标与回波数据的数据关联[6]。当传感器和目标数量增加时,方程组的数量可能会急剧增大,解这些方程组的运算量巨大,而且还存在如何从这些解中正确地取出目标位置的问题。因此,数据关联是传感器网络多目标定位的一个关键问题。
基于成像策略的多目标定位方法为克服多目标与回波数据的数据关联带来的问题提供了一种途径。文献[6]提出一种基于观测空间投影的定位方法,该方法就是基于成像策略的定位方法,其中观测空间是指传感器网络在空中的观测区域。然而,基于观测空间投影的定位方法存在如下一些问题:一是在均匀划分的观测空间投影,分辨率的空变特性导致成像精度下降;二是投影是基于回波相参积累的方法[7],而实际中传感器网络的回波不一定相参,导致定位精度下降。本文基于上述分析,提出了一种基于双站距离空间投影的传感器网络多目标定位方法,该方法通过映射关系将目标观测空间转换到BR(Bistatic Range)空间,并将目标概率信息投影到BR 空间,利用贪婪清除策略提取目标位置。
1 基于观测空间投影的多目标定位
1.1 基于成像策略的定位方法的基本原理
从微波成像技术的角度看,传感器网络能够被看作稀疏天线阵列。在此情况下,可以将成像领域的投影方法应用到目标定位中。图1 给出了基于成像策略的多目标定位的示意图。

图1 基于成像策略的多目标定位示意图
图1 中观测区域被划分为一组微小栅格单元,每个单元分配一个代表点,对整个观测区域进行遍历搜索[8]。对于每个代表点,计算其到各个传感器的距离,利用距离取出对应的回波数据,将回波数据在某空间中代表点所对应的像素单元进行积累,通过寻找图像的峰值来定位目标。可以看出,基于成像策略的定位方法不需要在回波中区分各个目标分别对应的回波,只是通过投影让目标的能量在对应的像素单元聚集,再通过寻找图像峰值取出目标位置,克服了解算大量方程组的问题,解决了数据关联的问题。基于观测空间投影的定位方法在利用距离取出回波后,先对其进行相位补偿,然后在观测空间进行投影。不难看出,基于观测空间投影的定位方法是一个基于成像策略的定位方法,其同样解决了数据关联的问题。然而,这个方法存在一些问题。
1.2 基于观测空间投影的定位方法的问题分析
1.2.1 回波相参性分析
基于观测空间投影的定位方法中关于回波的处理是基于相参积累的方法。基于相参积累方法把目标看成一群散射点,散射点的复散射系数不随观测角度变化。在投影处理时,先将由目标回波延时产生的相位进行补偿。
当传感器分布在一个广阔的区域时,由于散射系数随观测角度的变化以及传感器天线相位中心的误差,相干性难以保持,不能满足相参积累的条件。在回波相参性较低的条件下,如果继续使用相参积累进行回波处理,目标的能量可能无法在投影空间对应的像素点上累积,进而导致图像散焦,目标的定位精度较差。
1.2.2 分辨率的空变性分析
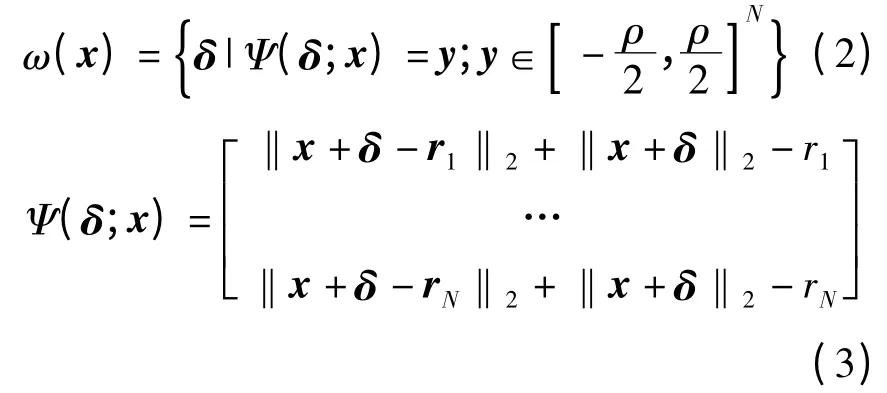
在利用雷达探测的过程中,由于雷达系统距离分辨率的原因,当两个目标之间的距离太近,小于一个分辨率单元时,两个目标将不可分辨,被当作同一目标处理。如果对于所有接收传感器来说,两个目标均不可分辨,那么这两个近距离目标存在分辨模糊的问题,以发射源为参考的双目标距离方程为一组不等式:

其中:δ 是位置变量;ρ 表示距离分辨率;x 是代表点位置;ri表示目标到第i个接收传感器的双站距离。在成像处理领域,满足不等式(1)的变量δ 的集合被定义为模糊域[9]。已知一个代表点x,在相同模糊区域的所有位置x +δ 都是不可区分的,本文将这种现象定义为等价单元。
栅格的划分应该尽可能与等价单元一致。如果划分的栅格较小,某些等价单元存在多个代表点,可能会导致漏检;如果划分的栅格较大,某些等价单元不存在代表点,可能会导致虚警。因此,为提高定位性能,对等价单元的分析很有必要。
已知一个代表点x 和接收机位置r,利用多元泰勒展开定理的一阶泰勒展开并整理,Ψ(δ;x)能够近似为如下形式:

不难看出,观测空间投影的等价单元在三维空间近似为多边形。可以进行以下推导:已知三个传感器,其位置分别为r1,r2和r3,假设有一对x和δ 满足和那么对于以r1,r2和r3为顶点的三角形内一点r*,近似有其中α*为式(6)所定义的向量。在此前提下,可以通过只考察三个传感器来继续等价单元的讨论。
αi的几何形状如图2 所示,已知一个代表点x,传感器ri和参考点0,αi平行于等腰三角形的高,该等腰三角形由单位向量x-ri和x 来决定。当三个传感器不共线时,α1,α2和α3不共面。

图2 αi 的几何形状
对于三个顶点以及给定的x 可以得到

其中:θi表示目标对传感器网络的张角;表示αi的单位向量。因此,等价单元是一个立方体线性转换后的平行六面体。六面体8个顶点的计算公式为

其中:yV表示立方体的顶点。由式(8)可知,等价单元的大小与距离向分辨率成正比,且等价单元随x 变化,具有空变性,空变性使得直接对观测场景进行均匀划分是不合理的,可能导致虚警和漏检,影响定位精度。
综上所述,基于观测空间投影的定位方法对回波的相参积累以及等价单元的空变性会影响目标的定位精度。因此,提出了一种新的投影算法。
2 基于BR 空间投影定位方法
针对基于观测空间投影定位方法存在的问题进行了改进:一是将回波的概率信息作为投影量;二是将观测空间转换到BR 空间,在BR 空间进行投影。最后,利用贪婪清除策略对目标进行提取。
2.1 回波的概率信息
从前面的分析可知,将基于相参积累的方法用于回波处理不符合实际,可能会导致目标定位精度较低的问题。因为位置估计问题可以转化为概率分布问题[10],所以可以将目标回波的统计概率信息作为投影量。回波数据可以表示为延时—概率对其中,i=1,2,...,N,N 是传感器接收机的数目表示在第i个传感器中存在概率大于门限值的第j个延时表示相关联的存在概率。很明显其中H0表示目标的假设表示与相关的观测值。已知一个延时—概率对,存在概率的分布可被写成如下形式:

其中:x 表示目标可能的位置;φ(·)是与模糊函数相关的核函数,对于脉冲信号,其为矩形函数。
对于第i个传感器,接收的数据是一个延时—概率对的集合,记为其中,J[i]表示第i个传感器中的延时的数量。由于对于同一个传感器来说,延时是互斥的,能够得到

对于整个传感器网络来说,假设传感器是互相独立的,最终的概率分布可写为如下形式:

2.2 观测空间到BR 空间的映射
前面已经讨论了,观测空间的等价单元是空变的,因此很难设计一个合理的划分。反之,公式(7)中等价单元y 是边长为ρ 的立方体,它是规则的和空不变的,所以可以很容易地在BR 空间进行均匀的栅格划分,使得栅格与等价单元保持一致。因此,不在观测空间进行投影,而将数据往BR 空间进行投影是合理的,距离空间投影定义为
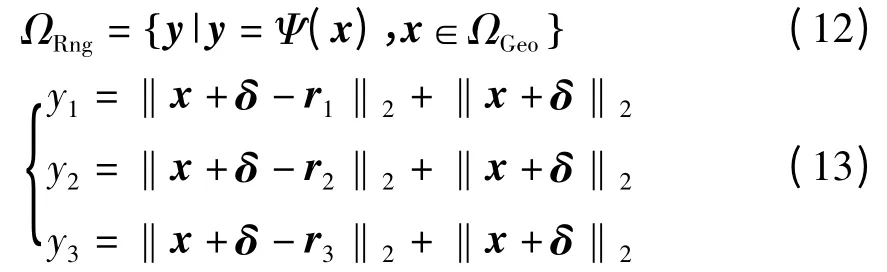
其中:ΩRng表示在BR 空间中的求解域;ΩGeo表示观测空间的求解域;δ 是位置变量。BR 空间和观测空间两者之间的映射由式(13)给出。很明显,已知一个观测位置x,只有一个双站距离空间中的y与x 相对应;已知一个y,有一个x(高次方程,只有一个解符合物理意义)与之对应。
在双站距离空间中,很容易寻找一个划分Ξ的方法,如下所示:
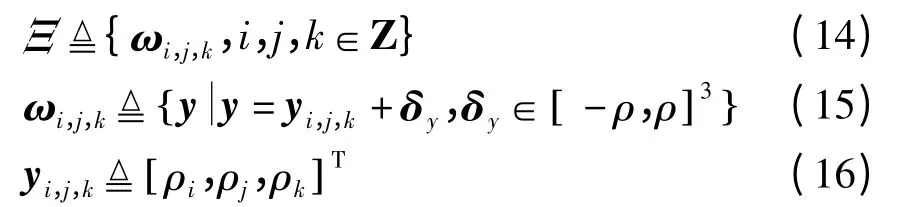
其中:ωi,j,k表示双站距离空间中一个规则等价单元;yi,j,k是BR 空间中等价单元ωi,j,k的代表点。
2.3 BR 空间投影的流程
将观测空间转换到BR 空间,并在BR 空间投影的步骤如下:
(1)选择三个传感器,其中这三个传感器组成的三角形要能够包含尽可能多的传感器;
(2)在观测区域中,计算针对三个传感器的最近和最远的双站距离,并将此距离作为BR 空间的边界;
(3)利用方程(16)计算BR 空间中的所有代表点,并求解方程(13),获得BR 空间中的代表点所对应的观测空间的代表点(即原代表点);
(4)利用步骤(3)中计算出的观测空间的一个代表点,计算代表点相对于传感器1 的双站距离或者双站延时,如果此双站延时属于延时-数据对集合O[i],则将此延时对应的数据往BR 空间的像素单元进行累加;否则不做任何处理;
(5)逐个改变传感器,重复步骤(4),直到所有传感器都被进行同样处理;
(6)逐个改变代表点,重复步骤(4)和(5),直到整个求解域都被处理过,最终得到一个BR 空间的三维图像。
2.4 基于贪婪清除策略的目标提取
在完成了BR 空间的投影后,可以得到一个三维图像,并通过选择那些超过门限的具有较大值的像素(意味着具有最高概率的目标),很容易地检测和定位目标。由于回波信号的采样,对于不同的接收机而言,同一目标的采样值可能分散到目标所在单元的附近单元,多次积累后,这些单元的累积值可能较大,即三维图像中目标附近可能存在较高的旁瓣。如果不对这些旁瓣进行抑制,这些旁瓣可能会被选择为目标,也因此会产生一些虚假目标。因此有必要通过一些相关技巧来抑制图像的旁瓣,从而有效地提取目标。
为了消除旁瓣,本文采用贪婪清除策略,其主要步骤如下:
(1)找出投影得到的图像I 中的最大值,将其作为一个目标,记录相关的观测空间的三维位置表示第k 次迭代;
(2)选择BR 空间中的一个像素(iR1,iR2,iR3);
(3)选择一个传感器rj,计算与相关联的双站距离,记为
(4)选择相同的传感器rj,计算与该像素相关的双站距离,记为R[k];
(7)重复步骤(3)~(6),直到处理完所有传感器;
(8)重复步骤(2)~(7),直到处理完所有像素;
(9)从步骤(1)开始,如果像素最大值小于ε0,则停止迭代;否则,继续检测和剔除,进行另一次迭代。
通过重复检测和剔除,最终能逐个取出目标的位置。
综上所述,完整的基于BR 空间投影的定位方法流程如图3 所示。
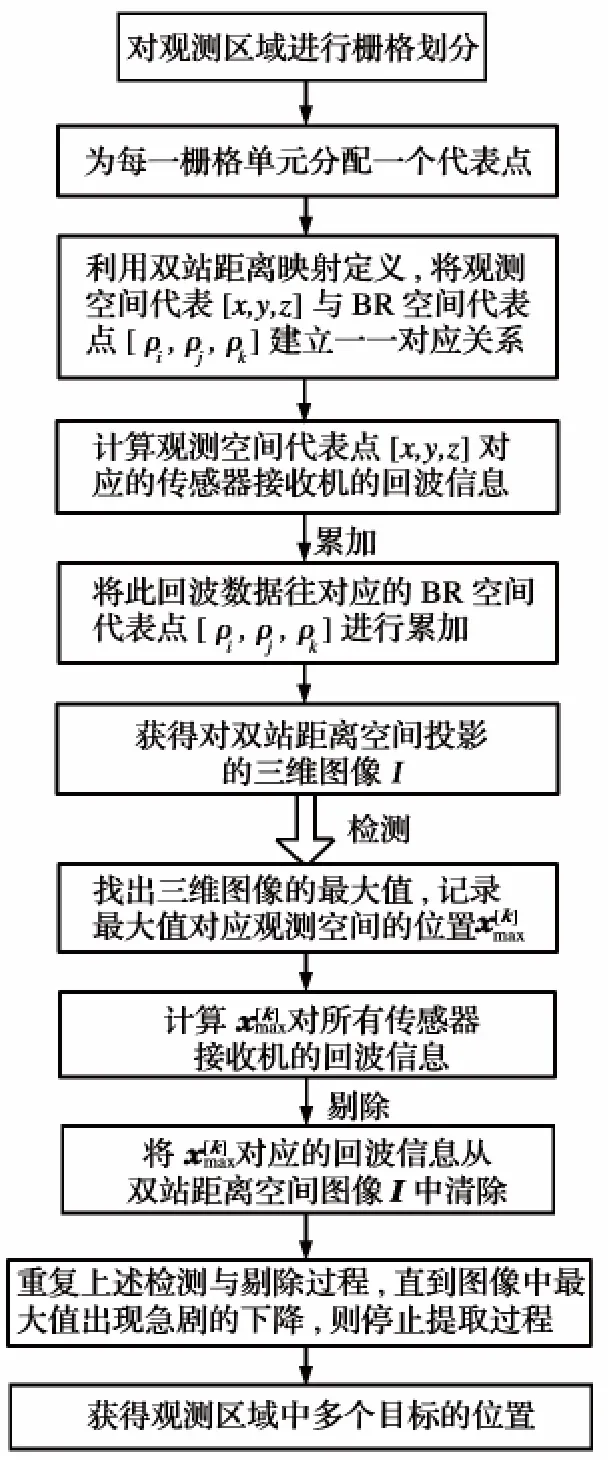
图3 基于BR 空间投影的定位方法流程图
3 仿真分析
3.1 等价单元仿真
本节通过仿真,对观测空间和BR 空间等价单元进行分析。假设发射源放置在原点,有20个传感器,其中的三个传感器分布在[-25,0,0](km),[25,0,0](km)和[0,43,0](km),其他传感器分布在由这三个传感器决定的三角形内。图4 和图5 分别描绘了目标点分别位于[50,50,10](km)和[200,150,10](km)时,观测空间和BR 空间的等价单元。
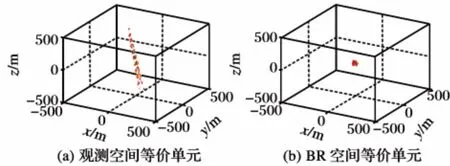
图4 目标位于[50,50,10](km)时,等价单元形状

图5 目标位于[200,150,10](km)时,等价单元形状
从图4 中可看出,当目标坐落在[50,50,10](km)时,在BR 空间中的的等价单元是一个点,但是在观测空间的等价单元散焦很严重。由图5 可知,目标位于[200,150,10](km)时,BR 空间中的等价单元仍是一个点,但是观测空间等价单元扩散成大片区域。由于划分的栅格单元远远小于观测空间等价单元的大小,在等价单元的范围内存在大量的栅格单元。如果有多个目标存在这些栅格单元内,由于这些目标都在等价单元内,因此不可分辨,会造成漏检。
3.2 投影方法的定位性能对比
本节对两种投影方法的定位精度进行了对比。仿真参数如下:发射机布置在原点,5个目标分布在以[50,50,10](km)为中心,大小为400 m ×400 m×400 m 三维立方体中(在观测空间)。目标的RCS 从1 到30 变化,回波中加入了标准方差为0.2 的高斯噪声,传感器的检测门限都为0.7(基于概率)。假设发射信号为单载频信号,载频fc=109Hz,系统的距离分辨率为10 m。
图6 和图7 分别给出了基于观测空间投影以及BR 空间投影定位方法的定位结果。不难看出,基于BR 空间投影定位的结果与目标的实际位置相匹配,而基于观测空间投影定位的结果偏离了实际位置。为了消除偶然性的影响,30 次实验定位结果的均方根误差如表1 所示。
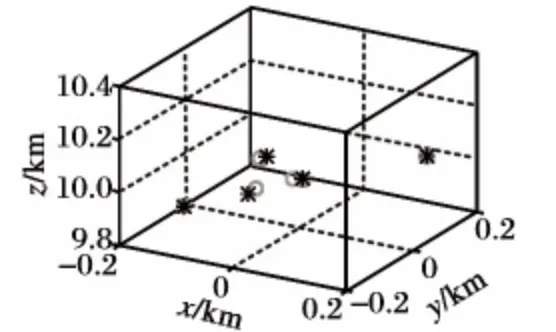
图6 观测空间投影的多目标定位结果
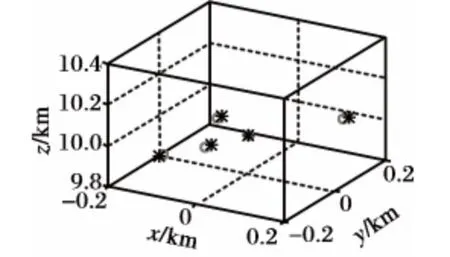
图7 BR 空间投影的多目标定位结果
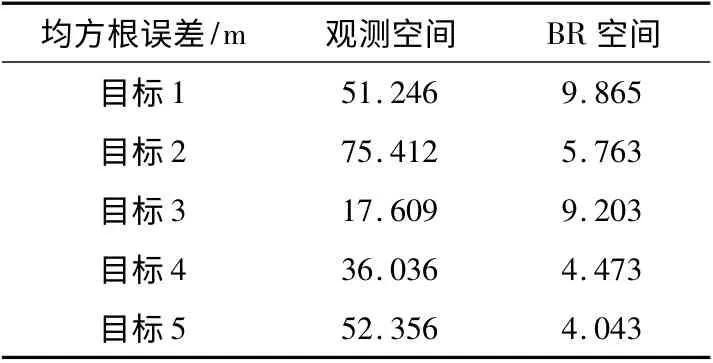
表1 两种投影定位方法性能对比
从表中结果可以看出,相对于基于观测空间投影定位方法,基于BR 空间投影定位方法的定位精度得到了明显的提高。
4 结 论
传感器网络多目标定位的主要问题是数据关联问题,基于观测空间投影的定位方法可以有效地解决数据关联问题,但其定位精度不高。本文提出了一种基于双站距离空间投影的定位方法。通过分析以及仿真结果表明,该方法具有以下优势:
(1)相对于传统的传感器网络多目标定位方法,解决了多目标定位方法中的数据关联问题。随着传感器数量的增加,该方法的运算量的增量远远低于传统方法。
(2)相对于传统的传感器网络多目标定位方法,将定位问题转化为成像问题,有效地解决了多目标回波的反褶、重叠、虚警等现象导致的难以准确定位的问题。
(3)相对于基于观测空间投影的定位方法,较大幅度地提高了定位精度。
[1]雷文英,陈伯孝,杨明磊,等.基于TOA 和TDOA 的三维无源目标定位方法[J].系统工程与电子技术,2014,36(5):816-823.
[2]Yang Kai,An Jianping,Bu Xiangyuan,et al. Constrained Total Least-Squares Location Algorithm Using Time-Difference-of-Arrival Measurements[J]. IEEE Transactions on Vehicular Technology,2010,59(3):1558-1562.
[3]Yang Kehu,Luo Zhiquan. Robust Target Localization with Multiple Sensors Using Time Difference of Arrivals[C]//Proceeding of the IEEE Radar Conference,2008:1-6.
[4]江翔.无源时差定位技术及应用研究[D].四川:电子科技大学,2008.
[5]Lei Wenying,Chen Baixiao. High-Precision Hyperboloid Location Method Using Passive Time-Different-of-Arrival Measurements[J]. Radar,Sonar and Navigation,IET,2013,7(6):710-717.
[6]Shi Tongyan,Zhang Xiaoling,Shi Jun. Multi-Target Positioning for Sensor Network Based on Imaging Strategy[C]//International Conference on Computational Problem-Solving,IEEE,2013:171-174.
[7]王姣. 雷达信号长时间相参积累若干问题研究[D].西安:西安电子科技大学,2013.
[8]Hong I K,Chung S T,Kim H K,et al. Fast Forward Projection and Backward Projection Algorithm Using SIMD[C]//Nuclear Science Symposium Conference Record,IEEE,2006,6:3361-3368.
[9]Shi Jun,Zhang Xiaoling,Yang Jianyu,et al. APC Trajectory Design for“One-Active”Linear-Array Three-Dimensional Imaging SAR[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(3):1470-1486.
[10]潘磊,陈鸣,游屈波.基于概率的空间三机时差—频差联合定位[J].电子信息对抗技术,2013,28(1):31-35.
猜你喜欢
军事文摘(2022年8期)2022-05-25
新高考·高三数学(2022年3期)2022-04-28
西南大学学报(自然科学版)(2022年4期)2022-04-15
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
军事文摘(2018年24期)2018-12-26
中文信息(2017年12期)2018-01-27
中国化妆品(2017年12期)2017-06-27
太空探索(2016年7期)2016-07-10
