
一种基于视觉的火星车自主导航方案设计
2015-11-15 05:13管叙军王新龙
航空兵器 2015年1期
管叙军,王新龙
(北京航空航天大学 宇航学院,北京 100191)
0 引 言
火星在太阳系八大行星中与地球的关系最为密切,属于类地行星。虽然火星的大小与地球不相称,但两者绕太阳运行的半径相近,都有四季的存在,一天的时间也与地球相似。而且,已经有证据表明,火星上有水存在。因此,火星被认为是离我们最近的最有可能存在生命的地方,这也是人类对火星的研究充满兴趣和期待的原因。
在火星探测中,火星车是在火星表面进行巡视探测的航天器,是火星探测必不可少的工具和手段。通过火星车在火星表面的探测活动,人们可以获取火星表面的环境资料,收集火星表面的岩石和土壤标本,从而完成科学探测任务。火星车通常借助地面站通过无线电测控进行导航控制,但由于地球和火星的自转和公转运动以及所带来的地面站和火星车相对地理位置的变化等,有时火星车会处于地面站无法测控的区域内[1];同时,火星车与地面的通讯也存在时延和带宽的问题。因此,火星车利用自身携带的测量设备进行自主导航控制已经成为重要的研究方向。
火星车自主导航技术手段主要有:惯性导航(包括航位推算)[2-3]、天文导航[4]和视觉导航[5-9]等。惯性导航因不受外界干扰,短时间内精度高,能够实现实时自主定位而受到青睐,但由于惯性导航器件误差随时间积累以及车轮打滑在长距离导航中会产生较大的误差,需要利用其他导航系统进行定期校正。视觉导航技术由于具有自主性强、准确以及可靠等优点,正被越来越多地应用到导航的实践中。尤其是最近30年,随着新概念、新方法、新理论的不断涌现,视觉导航技术在火星车自主导航方面得到了广泛的应用。天文导航没有误差积累,能够提供高精度的姿态信息,但容易受目标天体能见度的制约,而且数据更新率比较低。
可见,任何单一的导航方式都无法满足火星车对自主导航的要求。为此,本文在对不同视觉定位方法以及天文定姿原理详细分析的基础上,给出了一种适用于火星车的自主导航方案。
1 火星车视觉定位方法
火星车视觉定位是一种依靠CCD 相机获取外部信息,通过利用图像处理、特征匹配等技术确定自身位置的导航方法,主要包括视觉里程计、远点地标法、着陆器立体视觉导航、基于着陆成像的地图匹配定位方法以及基于石块位置分布不变特性的定位方法。
1.1 视觉里程计
视觉里程计是一种利用单目或双目摄像机得到图像序列,然后通过特征提取、匹配与跟踪估计载体运动信息的导航定位方法。由于单目视觉里程计只能处理位于一个平面上的场景点,无法得到场景的三维信息,因此当场景存在起伏时算法会失效。而立体视觉里程计根据提供的深度信息能够获得场景的三维信息,因此其应用性更好。所以,本文着重研究立体视觉里程计,其工作原理如图1 所示。
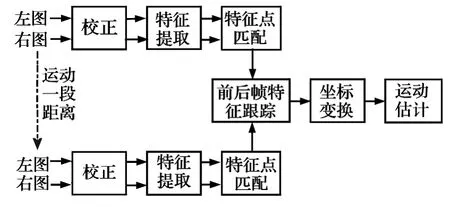
图1 立体视觉里程计的工作原理
由图1 可以看出,通过立体相机获得立体图像对后,首先需要进行图像校正,以满足两幅图像对应的特征点在同一扫描线上,从而使得匹配的搜索范围从二维降到一维,这样能够加快匹配速度,提高匹配精度。在此基础上,便可进行特征提取,以及同帧图像对特征点的立体匹配。然后在火星车运行一段距离以后,通过类似的操作,并对前后两帧图像进行特征点的跟踪匹配,就可以获得所选取的特征点在相机运动前后所对应的三维坐标。通过运动估计算法就可以求出火星车相对位置与姿态的变化。
视觉里程计在“勇气号”和“机遇号”火星车上,以及后来的“凤凰号”火星车上均得到了应用。这种方法不需要利用外部地标点或基准地图进行辅助,能够同时确定火星车的位置和姿态,在小范围内具有较高的精度。但此方法与航位推测法类似,属于逐步累加方式的导航方法,这类导航方式的一个缺陷就是会产生误差的积累。因此,此方法一般用于坡度较陡或车轮易打滑的地方,从而校正航迹推算方法中由车轮打滑和惯性导航器件漂移引起的定位误差。
1.2 远点地标法
远点地标法是指火星车利用摄像机探测位置已知的地标点,利用三角测量的方法来确定自身的位置。这种方法需要事先至少知道两个地标点,由于火星上没有人工地标,因此地标点通常选定为远处的山,其工作原理如图2 所示。

图2 远点地标法的原理图
由图2 可以看出,根据测距原理,利用山顶A和山顶B 在立体相机中的像坐标便可分别求出火星车与山顶A 和山顶B 之间的距离。又由于山顶A和山顶B 的坐标是已知的,火星车的高度即所处位置的海拔高度。因此,火星车与山顶A 和山顶B在水平面内的距离也是可以求出的。分别以山顶A和山顶B 在水平面内的投影为圆心,以火星车与山顶A 和山顶B 在水平面内的距离为半径作圆,则火星车必位于两圆的一个交点上。
远点地标方法只能确定火星车的位置信息,不能确定火星车的姿态信息。而且至少要求观测两个位置已知的地标点,这一条件并不总能得到满足,因此其应用受到一定的限制。但此方法的精度较高,在条件满足的情况下,可用于对火星车的位置信息进行更新。
1.3 着陆器立体视觉导航
着陆器立体视觉导航是一种利用着陆器上安装的两台相机同时拍摄火星车,根据立体视觉的原理确定火星车位置的方法。如果火星车上至少配置三个几何关系已知的特征点,则还可以求出火星车的姿态,其工作原理如图3 所示。
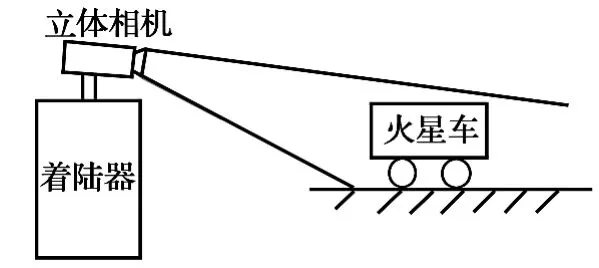
图3 着陆器立体视觉导航原理图
由于着陆器着陆以后,其相对火星的位置是固定不动的,因此,着陆器的位置一般可以较精确地确定。在此基础上,如果能够确定火星车与着陆器之间的相对位置,便可求出火星车的绝对位置。如图3 所示,根据着陆器上安装的立体相机所拍摄的立体图对,可以求出火星车与着陆器之间的距离,再结合着陆器上立体相机的姿态信息,便可确定火星车的位置信息。而且,如果能够获取火星车上三个几何关系已知的特征点,还可以求出火星车的姿态信息。
着陆器立体视觉导航方法比较简单,在一定条件下,能够同时求出火星车的位置信息和姿态信息。而且立体相机直接安装在着陆器上,不受火星车运动颠簸的影响,结果相对稳定可靠。但是,立体视觉测距误差会随着距离的增加呈平方级增长,而且在远距离上无法保证特征点被可靠地区分。因此,只有当火星车在着陆器的周围时,这种方法才有效。
1.4 基于着陆成像的地图匹配定位法
基于着陆成像的地图匹配定位法是指着陆器在下降过程中,利用CCD 相机所拍摄的一系列图像建立数字高程模型(DEM),火星车在漫游过程中,通过将立体相机所拍摄的导航图像与DEM 进行匹配就可求出火星车的位置信息,其工作原理如图4 所示。
由图4 看出,着陆器在下降过程中,利用CCD相机在不同高度上向下拍摄的一系列垂直CCD 图像,根据摄影测量的光束法平差原理求解相机的外方位元素。在此基础上,根据两张垂直拍摄的相邻图像可以求出共有特征点的三维坐标,从而得到DEM。火星车在移动过程中,将拍摄到的导航图像与DEM 中的公共特征点相匹配,由于DEM中的特征点的三维位置已知,由此便可求出火星车的位置信息。
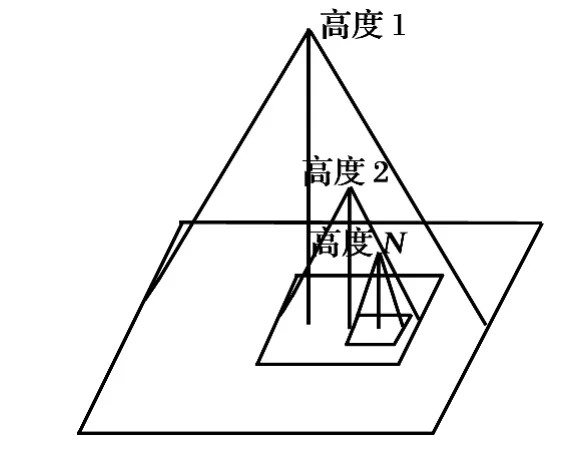
图4 数字高程地图建立的原理图
由于利用着陆器在下降过程中所拍摄的图像生产的DEM 的分辨率较高,火星车所携带的相机拍摄的导航图像的分辨率也较高,因此,基于着陆成像的地图匹配定位法的定位精度较高。但是,由于着陆器所携带的CCD 相机的视场范围有限,因此,这种方法只适用于着陆器的周边范围。
1.5 基于石块位置分布不变特性的定位方法
由于局部地图中若干个地势的局部高点与全局地图中对应高点之间具有接近的几何关系,基于石块位置分布不变特性的定位方法正是利用这一特点。通过匹配局部地图与全局地图中地势高点,便可求出局部地图在全局地图中的位置,从而完成火星车的定位。这就是基于石块位置分布不变特性的定位方法的原理,如图5 所示。

图5 基于石块位置分布不变特性的定位原理
图5 所示的全局地图是利用火星轨道卫星所拍摄的火星表面图像生成的,局部地图是利用火星车自身携带的相机所拍摄的导航图像生成的。由于全局地图中特征点的位置是已知的,在成功匹配局部地图与全局地图中对应的地势高点后,则局部地图中地势高点的坐标便是已知的。然后根据三角测量的原理,就可以确定火星车的位置信息。
通过利用高分辨率科学成像仪(High Resolution Imaging Science Experiment,HiRISE),使得火星轨道卫星所拍摄图像的分辨率已可达0.25 m。而且,火星基本是沙漠行星,地表沙丘、砾石遍布。所有这些都使得基于石块位置分布不变特性的定位方法成为可能。这一方法的应用范围不受限制,可用来对火星车的位置进行定期的更新。
2 火星车天文定姿方法
新型大视场星敏感器的出现,使得同时观测三颗及三颗以上的导航星成为可能,在不需要任何外部基准信息的前提下,可直接精确地(1″~7″)提供运载体相对于惯性空间的姿态信息,且精度在全程保持稳定,其工作原理如图6 所示。
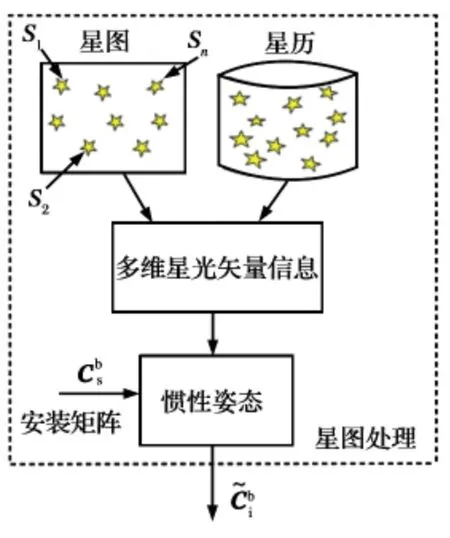
图6 天文定姿原理
设S1,S2,…,Sn是n(n≥3)颗已经被正确识别的恒星,可得这n 颗星的星光矢量在地心赤道惯性坐标系i 和星敏感器测量坐标系s 下的表示,即V1,V2,…,Vn和U1,U2,…,Un,分别形成两个3 ×n 的矩阵:


3 火星车自主导航方案的设计
通过以上的分析可以看出,视觉导航系统的定位精度较高,天文导航系统的定姿精度较高,因此,利用天文导航系统与视觉导航系统分别提供的高精度姿态信息和位置信息对惯导系统的位姿误差进行定期校正,以满足火星车对长时间、远距离、高精度自主导航的要求。设计的火星车自主导航方案原理如图7 所示。
从图7 中可以看出,火星车自主导航方案主要由导航测量器件、各子系统的解算单元以及滤波、校正单元组成。

图7 火星车自主导航方案原理图
3.1 导航测量器件
(1)惯性测量单元
惯性测量单元由陀螺仪和加速度计组成,由于本方案中采用的是捷联式惯导系统,陀螺仪和加速度计直接安装在火星车上。因此,陀螺仪和加速度计的输出分别是载体坐标系下火星车相对于惯性空间的角速率和加速度信息,经过转换积分就可以分别确定火星车的姿态和位置。
(2)星敏感器
星敏感器是一种以已知恒星作为观测基准来确定火星车姿态的器件,其姿态确定精度可达到角秒级,是目前精度最高的姿态测量器件。利用星敏感器提供的高精度姿态信息定期修正惯导系统中由于陀螺仪漂移而引起的姿态误差,能够满足火星车对高精度姿态信息的要求。
(3)CCD 相机
CCD 是电荷耦合器件(charge coupled device)的简称,是理想的CCD 相机元件。由于以其构成的CCD 相机具有体积小、重量轻、低能耗、视场宽、易于搭载等特性,因此被广泛应用。根据CCD 相机提供的位置信息定期校正火星车的位置,就可以满足其对高精度位置信息的要求。
3.2 各子系统的解算单元
惯导系统的解算已有大量文献详述,这里从略。天文导航系统的定姿原理在第2 节已详述。通过对火星车视觉定位方法的分析可以看出,视觉里程计已经在火星车上得到了应用,但由于存在误差累积的缺点,该方法一般只用于坡度较陡或车轮易打滑的地方。火星表面砾石遍布,使得基于石块位置分布不变特性定位方法的应用范围不受约束。因此,在火星车自主导航方案中,视觉定位部分采用视觉里程计与基于石块位置分布不变特性相结合,定期对火星车位置信息进行校正,满足火星车对长时间、远距离、高精度自主导航的要求。
3.3 滤波、校正单元
利用kalman 滤波器,通过融合视觉导航系统确定的火星车位置信息与惯性导航系统确定的火星车位置信息,以及天文导航系统确定的火星车姿态信息与惯性导航系统确定的火星车姿态信息,能够估计出惯性器件的常值误差,以及火星车的位置误差和姿态误差。利用惯性器件常值误差的估计值校正惯性器件的输出,以减小火星车位姿误差的发散速度。用位姿误差的估计值校正火星车的位姿信息,进而获得火星车高精度的位姿信息。
3.4 可行性分析
由于火星的大气层比较稀薄,当天文导航系统在观测目标天体时,所受到的干扰较小,使得天文导航系统能够提供高精度的惯性姿态信息;又由于火星在轨卫星上的相机分辨率已达0.25 m,而火星的大气对光线的影响比较小,因此利用火星在轨卫星拍摄的火星表面图像生成的基准图的精度也比较高。通过将火星车上视觉导航系统拍摄的图像与基准图相匹配,就可以获得高精度的火星车位置信息;通过融合天文导航系统提供的高精度惯性姿态信息、视觉导航系统提供的高精度位置信息以及惯性导航系统提供的位姿信息,使得火星车在复杂环境下实现长时间、远距离和高精度自主导航成为可能。
4 结 论
以上综述了视觉里程计、远点地标法、着陆器立体视觉导航、基于着陆成像的地图匹配定位方法以及基于石块位置分布不变特性的定位方法,重点对它们的定位原理以及优缺点进行分析。在此基础上,设计了一种适用于火星车的自主导航方案,通过选用视觉里程计与基于石块位置分布不变特性相结合的定位方法,并利用天文导航系统提供的高精度姿态信息以及视觉导航系统提供的高精度位置信息对火星车的位姿信息进行定期校正,以满足火星车在复杂环境下对长时间、远距离、高精度自主导航的要求。
[1]Yenilmez L,Temeltas H. Autonomous Navigation for Planetary Exploration by a Mobile Robot[C]// International Conference on. Proceedings of Recent Advances in Space Technologies,2003:397-402.
[2]Fuke Y,Krotkov E. Dead Reckoning for a Lunar Rover on Uneven terrain[C]//IEEE International Conference on Robotics and Automation,1996:411-416.
[3]Luo Qiangli,Han Junhai. Research on SINS and OD Integrated Navigation System for Land Vehicles[J].Navigation and Control,2011,10(4):6-11.
[4]Wu Xiaojuan,Wang Xinlong. A SINS/CNS Deep Integrated Navigation Method Based on Mathematical Horizon Reference[J]. Aircraft Engineering and Aerospace Technology,2011,83(1):26-34.
[5]Cheng Y,Maimone M W,Matthies L. Visual Odometry on the Mars Exploration Rovers:A Tool to Ensure Accurate Driving and Science Imaging[J]. Robotics & Automation Magazine,IEEE,2006,13(2):54-62.
[6]Maimone M,Cheng Y,Matthies L. Two Years of Visual Odometry on the Mars Exploration Rovers[J]. Journal of Field Robotics,2007,24(3):169-186.
[7]葛之江,尤红建,殷礼明,等. 利用着陆探测器下落及月球巡视探测器漫游的图像实现制导和自主导航[C]//中国宇航学会深空探测技术专业委员会第二届学术会议论文集,2005:334-337.
[8]邸凯昌,岳宗玉,刘召芹. 基于地面图像和卫星图像集成的火星车定位新方法[J]. 航天器工程,2010,19(4):8-16.
[9]侯建.月球车立体视觉与视觉导航方法研究[D]. 哈尔滨:哈尔滨工业大学,2007:97-105.
猜你喜欢
太空探索(2021年6期)2021-06-16
小哥白尼(神奇星球)(2020年12期)2021-01-18
军事文摘(2020年18期)2020-10-27
小哥白尼(趣味科学)(2020年3期)2020-07-27
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
军营文化天地(2018年2期)2018-04-20
北京航空航天大学学报(2017年4期)2017-11-23
小学生时代·大嘴英语(2017年1期)2017-03-20
中学科技(2015年7期)2015-07-03
