
虚拟试飞中的横航向品质研究
2015-11-05 07:09支真莉
中国科技信息 2015年18期
支真莉
虚拟试飞中的横航向品质研究
支真莉
以simulink环境开发的虚拟试飞平台为基础,使用频域低阶等效系统的方法对某型机横航向飞行品质进行分析研究,通过四种激励输入对三个等效拟配模型的拟配计算,讨论比较了这四种输入的优劣,以及分析了等效拟配模型和激励输入之间的影响关系,得到了一些结论,这些结果和结论对虚拟试飞和实际试飞起到了一定的指导作用。
随着我国航空工业的快速发展和自主研制能力的大幅提高,飞机复杂性的大幅增加、新概念的引入和机载软件密集度的迅速提高,使飞行试验越来越复杂、难度越来越大、风险越来越高,因此必然会增加飞行试验对地面试验和模拟试验的依赖性。目前在我国国防事业对先进航空武器系统迫切需要的形势下,以及在飞机设计、制造数字化和试飞数字化的大背景下,提出了虚拟试飞的概念和工程需求。通过虚拟飞行,可更加合理地安排试验任务,更加准确地判断试飞员完成动作的质量,更为有效地进行风险监控和风险化解,从而减少一定试飞架次的浪费、提高试飞效率。
虚拟试飞平台
虚拟试飞从使用观点定义为“在典型的地面试验设施上,如飞行模拟器、系统综合试验台、测试台和飞行试验地面站,运行所选的飞行试验任务”。
虚拟试飞选择人在环工作方式(也可选择离线仿真方式),按照任务给定的高度速度点以及组合试验状态,设置仿真初始状态;而试飞任务要求的操纵指令则由与虚拟座舱仿真机联接的操纵杆装置及键盘虚拟实现,飞行动态仿真机采集操纵指令并进行飞行动态仿真运算,存储仿真结果并将结果发送给座舱虚拟机,进行飞机姿态、座舱视景、平显、仪表、指示灯的仿真运算及动态显示。本文基于simulink环境开发某型飞机的仿真计算软件(包括空气动力学模型、运动学模型、大气模型、飞行控制系统模型、发动机模型等部分),并以该飞机风洞数据为基础,构建了一套逼真度较高的虚拟试飞平台,通过网络技术搭建监控系统网络,通过模拟器和监控系统进行交联,实现监控系统对模拟器试验的监控;同时通过将飞机飞行状态和飞行员动作传输给模拟器,模拟器经过计算将仿真结果再传给监控系统,实现飞行数据和模拟器数据的准实时对比。
以此平台为基础,采用低阶等效系统的方法对飞机的横航向动态特性进行研究。按照GJB185-86的方法对飞机的操纵性、稳定性进行定量的评价,选取与飞行试验相同的高度、速度点进行地面试验,通过对仿真结果进行等效系统拟配计算得到飞机的荷兰滚频率,阻尼比,滚转时间常数等重要参数,并总结得出规律。
横航向模型
根据飞行品质规范的要求,飞机横航向低阶等效系统的基本模型为:

其中,φ为滚转角,β为侧滑角,Fas为横向驾驶杆力,Fr为航向驾驶杆力(脚蹬力),Ts和TR分别为螺旋模态和滚转模态的时间常数,ζd和ωd分别为荷兰滚模态的阻尼比和无阻尼自然频率,ζφ和ωφ为等效零点阻尼比和固有频率,Tβ1、Tβ2和Tβ3是等效分子时间常数。
本文选用基本模型的三种形式进行拟配计算。
模型一:单纯航向输入模型
考虑荷兰滚模态主要表现为侧滑/偏航振荡,可以忽略滚转速率,进一步将模型简化为:

这种简化方法忽略了滚转自由度,有时可能会导致明显的误差,但尽管如此,上式仍然是影响荷兰滚的关键因素。
模型二:单纯横向输入模型
忽略姿态角,并且不考虑有利/不利偏航影响,模型可以简化为:

这是常见的滚转模态模型。
模型三:横向加横向输入模型
组合输入双拟配模型为:

其中p 为滚转角速率,r为偏航角速率。
理论上来说,只要有横向或航向输入和响应即可得到横航向模态特性,而且需要辩识的参数不是太多,有利于等效拟配。但是随着电传飞控战斗机设计技术的发展,横航向模态特性阻尼不断增大,单纯的横向输入或是航向输入能量有限,不能充分激发横航向模态,因此需要更大的输入能量,横航向组合操纵是提高输入能量的有效试飞方法。实际拟配计算中,由于飞机的特性通常并不都是已知的,选取哪种简化模型进行拟配以及飞机的模态是否完全激发出来就显得尤为重要。
等效系统方法
方程误差估计法(EEM)
方程在频率域中为:

该方程包含了过程误差,假设所有的输入和状态变量测量没有误差,可得到:

这里方程误差为:

方程误差估计的价函数为:

可以通过价函数最小来获得A ,B矩阵中的待估计的参数。
这里模型可以写成传递函数的形式:

最小二乘价函数可以写成:

但上述方程在实际计算中有一定缺陷,在实际使用时可以采用以下形式:

输出误差估计法(OEM)
OEM法假定的是没有过程误差,模型方程可写为:
输出误差:

图1 EEM框图

方程误差估计的价函数为:

可以通过下述公式来进行参数评估:

为了评估A、B、C、D四个矩阵中未知参数,可以根据价函数梯度来计算:

如果测量数据是频响曲线形式,价函数还可以写成以下形式:
某些时候,价函数被写成几部分,主要模型与Bode图中的幅值和相位相配,下面是单输入单输出的价函数:

其中w取0.0175。
本文采用方程误差估计法(EEM)的结果作为输出误差估计法(OEM)的初值进行计算,拟配频段为最终得到更准确的拟配结果。
算例及分析
算例及结果
本文分别采用航向倍脉冲输入,横向阶跃输入,航向加横向倍脉冲以及横航向组合倍脉冲输入四种输入激励来讨论某型机在Hp=5km, Vc=800km/h平飞时的横航向动态特性,从而得到四组结果。
结果A 航向倍脉冲输入,采用模型一,得到的拟配结果如图3所示。
结果B 横向阶跃输入,采用模型二,得到的拟配结果如图4所示。
结果C 航向加横向倍脉冲输入(航向和横向同时输入),采用模型三,得到的拟配结果如图5所示。

图2 OEM框图
结果D 横航向组合倍脉冲(先航向后横向输入或者先横向后航向输入),采用模型三得到的拟配结果如下图6所示。
下面将四组计算结果列入表1。

图3 单纯航向输入响应的等效拟配结果

图4 单纯横向输入响应的等效拟配结果

图5 航向加横向响应双拟配结果
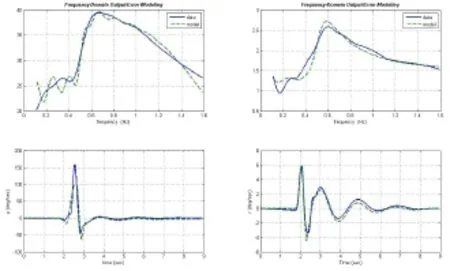
图6 组合倍脉冲响应双拟配结果
结果分析
从5.1的计算结果可以看出:
a 单纯的航向或者横向输入虽然对等效拟配模型要求和计算都进行了简化,并且易于辨识,但是可能没有完全激励飞机的响应而不能更准确的得到等效拟配的结果,另外,由于单通道输入,在选择拟配模型的时候也会造成一定的困难,并不能完全确定哪种拟配模型更适合该机,尤其是荷兰滚、滚转和螺旋三种模态出现相互耦合的情况,在飞行品质分析中,想要得到横航向动态特性也需要更多的试验数据,降低了试飞效率;

表1 四种输入响应的计算结果
b 航向和横向同时输入激励飞机得到响应进行双拟配,这种输入方式在虚拟试飞中可以得到很好的应用,并且能够拟配计算出比较准确的结果,但是实际试飞中,由于飞行状态的改变,并不能完全将航向和横向输入叠加起来进行拟配来等同双输入的双拟配;
c 横航向组合倍脉冲是一种增强飞机响应的双输入激励信号,不仅能够更充分的激发飞机横航向的各种模态,也易于在试飞中实现,并且在双拟配模型的计算中得到更准确的结果,与航向加横向的双拟配一样,选择模型变得容易,但是待辨识的参数多达17个,辨识的过程也会更复杂。另外,航向和横向中哪个方向应当作为先输入的通道,依然需要根据飞机的模态特性做出选择;
d 需要指出的是,虚拟试飞的计算结果与试飞结果存在一定的偏差,主要是由于阻尼比的计算值偏小引起的。这在飞行品质评价时,尤其是在一些特殊的状态点,会影响到飞行品质的评价结果。本算例中,采用模型一拟配得到的荷兰滚阻尼比满足国军标标准2的要求,而采用模型三得到的荷兰滚阻尼比满足国军标标准1的要求。
结语
本文通过在虚拟试飞中进行的横航向品质计算和分析,得到了虚拟试飞中更为实用有效的试验方法和等效系统拟配方式,这些结果不仅为虚拟试飞技术提供了可靠的保障和依据,也对实际试飞工作起到了一定的指导作用。
支真莉
中国飞行试验研究院
支真莉(1984-)女,汉族,河南省商水县人,硕士,主要研究领域为飞机飞行品质。
10.3969/j.issn.1001-8972.2015.18.004
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
振动与冲击(2022年1期)2022-01-27
小哥白尼(趣味科学)(2021年6期)2021-11-02
新世纪智能(高一语文)(2021年3期)2021-07-16
故事作文·高年级(2021年4期)2021-05-06
地震研究(2021年1期)2021-04-13
小哥白尼(神奇星球)(2021年11期)2021-03-08
民用飞机设计与研究(2019年4期)2019-05-21
振动与冲击(2019年4期)2019-02-22
电子制作(2017年24期)2017-02-02
