
基于电阻阵列的红外场景生成技术
2015-11-05 07:16:00高辉赵松庆2吴根水2陈海燕赵西帅中国空空导弹研究院制导控制系统研究所洛阳470092航空制导武器航空科技重点实验室洛阳47009
航空学报 2015年9期
高辉*,赵松庆2,吴根水2,陈海燕赵西帅.中国空空导弹研究院制导控制系统研究所,洛阳 470092.航空制导武器航空科技重点实验室,洛阳 47009
基于电阻阵列的红外场景生成技术
高辉1,*,赵松庆1,2,吴根水1,2,陈海燕1,赵西帅1
1.中国空空导弹研究院制导控制系统研究所,洛阳471009
2.航空制导武器航空科技重点实验室,洛阳471009
针对红外成像制导半实物仿真试验的需求,研究了红外场景生成技术。主要通过对场景的建模、目标及场景的红外特性分析,开展了基于可见光图像调制生成红外图像技术的研究。同时对飞机、地面背景及红外诱饵干扰的建模技术进行了探讨,完善了红外场景的生成方法。利用该红外场景生成技术为基于电阻阵列的红外图像转换器提供输入信息,驱动电阻阵列产生红外辐射,经热像仪观测,生成的图像细腻、真实度高,为制导半实物仿真试验提供了更为逼真的红外仿真环境。
半实物仿真;红外纹理生成;红外场景建模;目标干扰建模;电阻阵列
http://hkxb.buaa.edu.cn hkxb@buaa.edu.cn
随着红外成像制导武器的不断发展,红外制导半实物仿真已成为制导武器系统的一种关键的实验室评价工具。它从以往的试验验证手段,现已发展为设计、验证和优化平台,贯穿制导武器研制的全过程[1]。
在红外半实物仿真测试中,可利用仿真系统为红外制导系统提供与实际工作状况相似的环境,需要构建的环境如下:
1)为弹体提供三维运动环境。
2)为红外导引系统提供目标和背景的红外辐射环境。
3)为舵机提供力矩环境。
上述3种环境分别由五轴转台、红外目标模拟器和负载模拟器提供。此外,还需要仿真计算机和仿真总控台,并且以光纤网络作为整个半实物仿真系统的集成基础,各个设备之间通过光纤进行数据通讯;仿真系统的时序逻辑控制由产品控制台完成,目标和干扰的运动学模型计算由仿真计算机完成,目标生成控制由红外场景生成系统的控制器完成。
作为红外制导半实物仿真的关键部件,红外场景生成系统为导引头提供了动态的红外目标和背景图像,逼真地模拟了导弹发射过程中导引头接收到的红外辐射情况。红外场景生成技术主要包含软件和硬件两方面,其中,软件方面包括红外场景的建模及目标红外特性与运动特性建模,硬件则主要是红外场景生成装置。在半实物仿真过程中,图像生成计算机调用事先建好的模型,赋予其红外辐射亮度值,并将辐射亮度值转化为驱动电压,最终驱动红外场景生成装置生成红外场景图像以供导引头接收[2]。
国外对红外场景的仿真技术研究起步较早,不仅研制成功了多种类型的红外场景生成装置,同时也对场景建模及目标/背景的红外特性进行了大量研究[3],建立了多个武器仿真中心,如美国陆军航空和导弹司令部(AMCOM)所属的高级仿真中心(ASC)、埃格林空军基地(Eglin AFB)的空军研究实验室(AFRL)、陆军试验鉴定司令部(ATEC)所属的红石技术试验中心(RTTC))、美国休斯公司、英国宇航公司以及法国军事电子技术中心等代表欧美武器系统仿真领域的最高技术水平的仿真实验室,均投入巨资开展红外场景生成技术的研究。此外,国外还推出了一系列商用的红外场景生成软件,例如:JRMTechnology公司推出的Genesis MC材质分类软件、环境仿真模块Sigsim和传感器仿真模块Sensim等套件,可用于红外场景的构建;法国OKTAL-SE公司开发的SE-Workbench-EO软件,可以从物理原理上对各成像环节进行仿真,依据热传导方程计算不同材质的表面温度,获得目标和环境的红外辐射亮度,再依据大气环境等影响红外辐射传输的条件构建由传感器接收到的红外场景。限于国外的技术封锁,国内红外场景生成技术与国外还存在较大差距,尤其是基础理论方面,对目标特性的认识还存在一定的不足,工程化应用有限[4-7]。本文针对红外制导空空导弹半实物仿真试验的需求,对基于电阻阵列的红外场景生成技术进行了研究。
1 红外场景建模
对红外场景的建模采用三维建模方法,即利用计算机在满足需要的精度上对整个场景进行建模,然后设置投影平面(类似于一个摄像机的像面),采用三维到二维的投影算法计算场景在该投影平面上的二维图像。此外,还必须对场景中各个物体间相互遮挡的情况加以考虑,最终生成完善的符合几何成像关系的场景[8]。
1.1 处理流程
红外场景仿真的真实感意味着仿真结果在客观上符合实际物理过程,满足应用必需的准确度。红外纹理的真实感很大程度上决定了仿真的真实感。为此,场景的渲染应采用符合红外辐射传输过程的动态红外图像生成模型,以体现场景的红外物理特征。为了实时、准确地生成动态红外场景,需要建立各种环境条件下的地面不同材质的表面宏观均值温度生成模型,以计算仿真对象的宏观均值温度,并进一步采用基于可见光图像的红外纹理细节调制方法,对温度场进行微观调制,生成物体表面温度分布微观特征。对于目标温度,则根据已有其他目标数据进行外推扩展,生成目标的温度分布。最后,进一步结合物体表面的红外发射率和反射率等特征,将辐射特征编码成DDS(Direct Draw Surface)格式纹理,用于后期动态红外场景驱动程序中图形处理器(GPU)的实时采样,计算出包含环境反射、大气透过率和大气路径辐射等效应的物体表面仿真红外辐射值,生成高真实感的红外仿真场景。
1.2 基于可见光图像调制的红外纹理生成
红外纹理的生成首先应建立红外材质库,基于热平衡方程对地面不同材质建立热物理特性预测理论模型,并根据已有数据对目标进行外推扩展,建立纹理的宏观温度场分布。通过人工调节的方法设计红外纹理的微观细节,以应用于三维红外景象设计与集成[9]。具体的物体表面红外纹理生成流程如图1所示。
根据物体表面红外纹理生成的设计概念和处理流程,可将物体表面红外纹理生成流程分为4个大的模块:宏观均值温度生成模块、微观纹理特性生成模块、编码存储数据模块及输入输出模块。相应的软件总体结构如图2所示。
1)宏观均值温度生成
即从宏观角度实现温度空间分布。由于目标和地形的不同区域因环境条件和自身物理特性等的区别,其温度的整体(均值)变化是非常剧烈的。但在时间较短的仿真中,其变化很小,为简化问题处理,通常可认为温度均值不变,从而能够建立不同区域和温度均值的对应关系。
2)微观纹理特性生成
对红外纹理数据进行后处理时,由于不同材质之间不停地进行热传递,温度没有明显的梯度变化,都是渐变的过程,所以红外图像的边缘是模糊的。因此,按照邻域平均方法对边界周围的均值温度和发射率进行过渡处理。假设要计算坐标为(x,y)的像素C 的温度值Tx,y,邻域半径取为r,则有
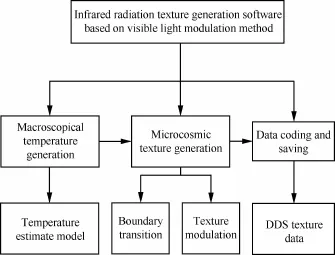
图2 基于可见光图像调制的红外纹理生成软件结构Fig.2 Structure of infrared radiation texture generation software based on visible light image modulation

式中:i和j为邻域内的相对坐标。在均值温度上叠加温度扰动,使物体表面辐射分布发生起伏,可以实现红外纹理细节信息的增加。由于可见光纹理和红外纹理在空间分布上具有一定的相似性,将可见光对应像素的RGB分量按照适当的权重进行加权平均,然后叠加在均值温度值上,实现微观纹理特征调制。调制温度T的计算方法为

式中:Taverage为均值温度;α为调制因子,通过调节α可以改变红外纹理细节的多少,α越大,细节信息越多;G为处理后的可见光图像上某个像素点的灰度值,取值范围为0~255。
3)编码存储数据
由于均值温差和发射率都是浮点型数据,可采用Direct3D的DDS纹理格式实现数据编码。如上所述,表面红外纹理的每个像素应包含场景区域类型、均值温差和发射率等内容,因此应组织成四通道32位浮点型DDS纹理以保证数据精度。
4)输入和输出
软件的输入数据为需要生成对应红外纹理的可见光图像,格式为*.bmp、*.jpg和*.png。在软件中就是对可见光图像进行框选,赋温度、发射率和反射率等信息,最终将其转换为包含红外数据的DDS格式纹理。
输出数据为表面红外纹理每个像素应包含的场景区域类型、均值温差和发射率等内容。由于温度值应该是浮点数,因此应组织成四通道32位浮点型DDS纹理以保证数据精度。其中,采用纹理像素的R通道保存场景区域类型信息,G通道保存均值温差信息,B通道保存发射率信息,A通道在生成烟雾等具有一定透过率的材质的纹理时,用来表征其透过率信息。
1.3 三维红外景象设计与集成
通过图形图像工具和三维建模工具针对三维红外景象的不同内容建立景象的几何模型。并通过UVW贴图等三维贴图手段将模型的纹理映射模型上,完成整个场景中景象的设计,最终将整个场景的集成规划根据场景要求输出相应的模型和地形文件。
1.3.1 飞机目标建模
根据典型目标的几何参数,使用3DS MAX和MultiGen Creator等三维建模软件完成三维目标独立模型的建立,并最终导入到3D MAX中统一为max文件的三维目标模型,同时为之赋予实拍或者仿真生成的纹理,以得到比较真实的目标模型。根据目标几何特征,在建模时通常可将目标分为刚体或柔性体。
1)机体建模
根据飞机目标的真实几何信息,利用3DS MAX和MultiGen Creator等三维建模工具建立飞机三维模型。需要根据要求调节模型的复杂度,即注意模型的三角形个数。构成模型的三角形个数越多,模型就越逼真,但这样会消耗过多的资源。因此,模型精细程度需要与资源达到一个平衡。
利用红外纹理生成软件,根据飞机机体不同位置的温度和发射率等信息,生成相应的红外纹理。然后,将生成的红外纹理映射到所建的飞机模型中。
2)尾焰建模
由于飞机尾焰属于流体,和刚性的蒙皮表面不同,它没有一个明显的表面的概念,很难使用几何模型来表达,所以不能用对刚体建模的方法来构造尾焰模型,故对于飞机尾焰这类流体目标拟采用Billboard技术进行建模。
①Billboard技术
Billboard广泛应用于三维场景仿真技术中。一个Billboard实际上就是一个始终面向观察者的平面,通常为一个四边形。其朝向随着Billboard和观察者的移动而不断的改变。
将飞机尾焰视为一个四边形Billboard处理,飞机轴线位于该四边形所在的平面上,并且尾焰Billboard能且只能沿着该轴线旋转;由于飞机在三维空间中的位置和姿态可以随意变化,其轴线也可以任意改变,所以可用任意轴Billboard来模拟飞机尾焰[10-12]。
在模拟飞机尾焰时,根据尾焰和机体的相对位置以及机体的世界坐标系变换矩阵,能够实时计算出尾焰中心在世界坐标系中的位置;然后,再根据视空间变换矩阵,可计算出观察者的位置;最后,求得尾焰的世界坐标系变换矩阵,从而使尾焰Billboard被正确旋转,使其朝向一直面对着观测者。
②动态尾焰纹理
典型的Billboard技术并不能完全满足仿真试验的要求,因为随着飞行速度和观察角度的不同,飞机的尾焰辐射并不相同,所以Billboard上映射的纹理应该使用动态插值生成的图像。因为试验条件的限制,只能获得一些特定速度和角度的尾焰辐射数据,因此必须从这些特定速度和角度对应的辐射数据出发,在给定速度和角度范围内插值生成其他速度和角度对应的尾焰数据,编码后作为Billboard的纹理信息。该算法流程具体如下。
步骤1根据飞机当前的飞行速度v查询纹理文件,找到最临近的飞行速度对应的辐射数据;由于与飞行速度严格对应的辐射数据很少,可假定速度是离散取值的,其间隔为10 m/s,并认为落在这一间隔中的所有速度是相等的。
步骤2根据当前的观察角度θ,在步骤1所找到的辐射数据中,查找最临近角度θ1和θ2所对应的辐射数据(θ2≥θ1)Dθ1和Dθ2。
步骤3计算权重因子F1和F2:

步骤4对于尾焰顶点对应的纹理坐标(U,V),计算角度θ对应的辐射数据:

③尾焰纹理扰动
尾焰并不是一个刚体,其形状会随着时间不断变化,这种动态效果可以通过扰动进行模拟。一般说来,尾焰垂直方向的扰动很小,可以忽略不计,只需模拟水平方向的扰动效果即可。
扰动也是通过纹理映射的方法实现的。首先用分形方法生成一张随机扰动纹理,为8位的灰度图像。定义扰动速度S(U,V),得到任意时刻t对应的扰动纹理坐标K′(U,V)为

最后将K′(U,V)归一化,得到K(U,V)。利用纹理坐标(U,V)对所得的扰动纹理进行查找,得到扰动的临时值N∈[0,1]。然后定义一个扰动的大小D∈[0,1],利用式(7)可得到最终的扰动值P∈[0,1]为

最后,将扰动值P加到尾焰的水平纹理坐标U上,得到的尾焰在水平方向上将具有动态效果。
1.3.2 地面背景建模
对于属于开放式场景的战场环境,其建模流程通常为:将高程数据转化为灰度高程图像;将灰度高程图像导入三维建模工具3DS MAX,利用地形生成插件修改调节各种参数,采样生成几何地形网格;基于高程图像进行地貌规划,生成地貌分布特征。
1)数字高程数据处理
对于实际测量的高程数据,目前广泛应用的数据格式主要有美国国家影像和制图局(NIMA)的DTED数据、美国国家地质调查局(USGS)的DEM以及DLG数据等。这些数据格式将对高度数据编码描述,并且有些数据格式(如DLG数据)还包括地表特征的描述。实测数据主要用于对实际场景的复现。
应采用数字高程信息处理软件对具体格式进行相应的解码转换和高程解析,截取所需大小的场景生成3DS MAX中可用的高程灰度图像,如图3所示。
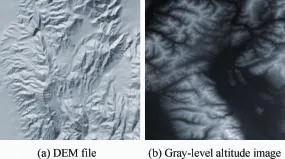
图3 DEM数据处理Fig.3 Process of DEM data
2)高程灰度图到三维网格的转化
DEM数据最终要用三角形面的拼接来实现三维化。通过对高程数据作二次采样,并选择一个适当的算法,实现地形的三角化。
能将高程灰度图转化为地形网格的工具有很多,例如可通过3DS MAX软件中的DREAMSCAPE工具生成地形网格,或是利用MultiGen Creator软件生成地形网格。对几何地形三维网格还需进行细节修改,包括清除褶皱和缝隙等瑕疵。
对于帧频为200 Hz的要求,需要对地形进行三角面片的合并和简化;如果对逼真度要求较高,则可以使用简化的网格模型。
3)进行地貌规划
通常需要结合背景高程特征进行地貌、地物规划,以确定各类地貌的分布,如图4所示。

图4 总体地貌和地物规划图Fig.4 Image of overall physiognomy and landform
然后根据总体地貌和地物规划图,利用Photoshop等工具,制作分类地貌区域分布图,为地形红外纹理映射阶段的工作提供基础数据。针对规划的地貌分布,可得到相应的分类地貌区域分布图,如图5所示。
4)集成设计
在建模阶段,因进行目标和背景设计时所采用的3DS MAX和PhotoShop等软件功能所限,必须采用普通的纹理格式进行可见光纹理映射。而红外纹理所采用的DDS格式是特定编码,无法直接应用于三维建模,而是在渲染过程中与模型进行绑定。因此,需要以可见光纹理为中介,建立红外纹理和三维景象绑定关系,完成三维红外景象集成设计。
直接利用现有的高程数据,经转换和处理后生成所需地形图的方法简单易行,操作性强,可以生成较复杂的场景,减少了图形工作站的运算时间,提高了效率。

图5 分类地貌区域分布Fig.5 Area distribution of physiognomy divisions
1.3.3 诱饵干扰建模
分析红外诱饵弹干扰红外成像制导武器诱骗目标的基本原理,对红外诱饵弹在发射后及燃烧单元的运动模型和轨迹方程进行建模,对红外诱饵弹的红外辐射特性进行实测建模。
在红外诱饵弹建模方法的选择上,采用基于粒子系统与Billboard纹理映射相结合的方法来模拟动态诱饵弹,使模型效果的真实性大大提高[13-14]。
利用Billboard技术和红外纹理映射的方法(帧频要求为200 Hz)或利用Billboard技术、粒子系统和红外纹理映射的方法(帧频要求较低)在OGRE平台中实现对红外诱饵弹燃烧效果的仿真。
1)红外诱饵弹的空间分布建模
诱饵弹从载体(飞机、军舰)上投放到空中后,其烟火剂经点燃后迅速燃烧,形成红外辐射假目标。根据红外诱饵出膛后发生燃烧反应的微元体初速度、加速度、风力和阻力等因素分析诱饵弹的运动轨迹数学模型,求出红外诱饵弹的速度方程,并对燃烧单元爆炸时的空间分布进行建模。
图6为红外诱饵弹发射后的运动轨迹。红外诱饵弹在运动过程中主要受发射时与地面的夹角、初速度、重力、阻力和风力等的影响。红外诱饵弹出膛后发生燃烧反应的微元体质量为m,重力加速度为g,投射力转化为初速度。假定发射器相对飞机X轴、Y轴和Z轴的安装位置为坐标原点,红外诱饵弹在飞机中心位置沿飞机轴线向后发射,如果红外诱饵弹的发射方向为其他方向,可通过相应的坐标变换转换到沿飞机轴线向后的发射方向。红外诱饵作为椭圆体的点源,主要受到升力、阻力、投射力和地球引力影响,其中,阻力和升力是红外诱饵几何形状、速度、质量和大气密度的函数。红外诱饵弹发射以后,主要受重力、空气阻力和自然风的影响。
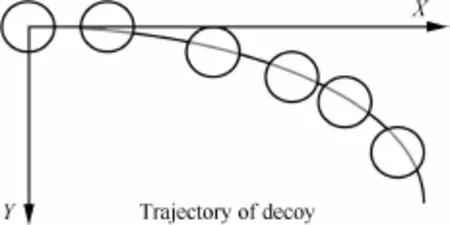
图6 红外诱饵弹发射后的运动轨迹Fig.6 Trajectory of decoy after launched
2)红外诱饵弹辐射特性模型建模
红外诱饵弹被抛射点燃后产生高温火焰,并在规定的光谱范围内产生强红外辐射,从而欺骗或诱惑敌红外探测系统或红外制导系统。红外诱饵弹从点燃开始到辐射强度达到额定值的90%时所需的时间称为起燃时间。无论诱饵弹在起燃时间后的辐射强度如何变化,其在诱饵弹刚燃烧时总会存在一个剧烈上升的过程。在起燃时间内,各种型号诱饵弹的辐射强度基本上是直线上升的,然后随着诱饵弹燃料不断消耗,辐射强度逐渐下降直到消失。
由于红外诱饵弹的燃烧成分较为复杂,其核心部分的红外辐射介于灰体和气体之间,因此,对其精确建模的难度较大。考虑到仿真过程中关心的只是不同投放高度及投放速度下的诱饵弹辐射亮度和形体随距离与时间的变化规律,因此,可采用简化方法实现。实测数据表明,多数情况下诱饵弹在图像上表现为近似球形,故可设定诱饵弹在图像表现上为灰度均匀的圆形。在建模时,诱饵弹燃烧单元红外辐射的变化特性主要是以试验测试数据为基础,通过对大量燃烧单元的点燃实验,获得诱饵弹辐射强度随投放高度的变化曲线、随投放速度的变化曲线以及其随时间变化的动态辐射强度曲线,进而获得一定投放高度和投放速度下的动态辐射强度曲线。利用导引头实测诱饵干扰弹近距动态燃烧的图像形体随时间变化的曲线,并依据朗伯余弦定理中辐射强度、辐射亮度及视线方向投影面积的关系获得诱饵干扰的辐射亮度曲线。最后将其转换为红外图像。在本文仿真过程中,以常用的实测红外诱饵弹辐射特性数据进行建模,求出辐射强度和温度随时间变化的动态辐射强度曲线。
3)红外诱饵弹几何模型建立
在OGRE平台中利用粒子系统模型能够很好地体现不规则模糊物体的动态性和随机性[15]。但考虑实时性对帧频的要求,对于帧频为200 Hz的要求可采用Billboard技术进行诱饵弹的建模;如果对于逼真度要求较高,则可以采用Billboard技术与粒子系统并用进行建模,并在此基础上利用粒子重用技术、Billboard技术与纹理映射技术对诱饵弹模型进行优化。粒子系统在OGRE渲染的基本流程如图7所示。

图7 OGRE渲染流程图Fig.7 Flow chart of OGRE rendering processing
OGRE初始化部分主要完成程序中对OGRE所需管理器(如场景管理器、资源管理器、材质管理器和纹理管理器)的初始化工作等。加载资源部分主要完成对所需资源的调用以及相应脚本的解析。创建场景部分主要完成相机的创建和粒子系统各部分模块的加载。最后,场景管理器利用渲染队列将创建好的资源以一定的顺序渲染到窗口中并显示出来,完成三维图像的显示。
4)OGRE粒子系统
OGRE引擎在渲染场景特效时,需调用内部的粒子系统模块。粒子系统模块根据内部设置的粒子属性,在粒子的生命周期内实时更新粒子,并将每一帧的结果实时渲染出来,给人以动态变化的视觉特效[16-17]。OGRE粒子系统内部设置关系如图8所示。

图8 OGRE粒子系统设置图Fig.8 Scheme of OGRE particle system setting
利用粒子系统内部各模块间的相互作用,可以实现诱饵弹的扩散、旋转和受力等多种特效,且效果十分符合真实的情况。
5)大气辐射传输建模
该模块借助MODTRAN计算模型实现大气辐射传输特性计算,满足其他模块的需求。由于大气计算的运算量大,无法在反演或重构时进行实时计算。本模块根据给定参数预先计算出大气路径透过率、路径辐射和天空背景辐射,并编码存储为纹理图像,以满足仿真时在物体自身辐射基础上实时叠加大气效应的需求。
另外,根据辐射统计特性获得积云的辐射周视环面分布场,再利用可编程渲染管线对晴空背景辐射纹理进行采样,与云辐射图结合,量化输出天空背景辐射。
2 实时图像生成及电阻阵列驱动控制
基于GPU的实时图像生成模块的主要功能是建立符合红外辐射传输过程的“目标-背景-大气”综合模型,根据用户输入参数和控制,生成满足用户需求的三维红外场景图像。在实时网络图像生成模式下,程序按照仿真条件加载相应的红外辐射纹理数据、目标及背景三维模型等资源,完成场景的初始化。然后根据输入控制解算模块解算出的控制信息对导弹方位和导弹姿态角实时进行调整,再使用OGRE渲染引擎将数据送入GPU中进行渲染,生成本征红外辐射场景。之后,采用集成的大气辐射传输模块,添加大气衰减和路径辐射对场景的影响,最终完成动态三维红外场景图像的渲染工作。在本机图像生成模式下,程序按照仿真条件加载相应的红外辐射纹理数据、目标及背景三维模型等资源,完成场景的初始化。然后,程序根据用户输入的参数对导弹和目标的方位和姿态角进行控制,再使用OGRE渲染引擎将数据送入GPU中进行渲染,生成本征红外辐射场景。接着采用集成的大气辐射传输模块,添加大气衰减和路径辐射对场景的影响,最终完成动态三维红外场景图像的渲染工作。整个动态红外图像生成流程如图9和图10所示。
最终的红外场景图像数据由渲染管线输出后,一般是直接送入后台缓存(Background Buffer)中,然后再通过交换送至前台显示出来。
图11为GPU体系结构。从图11中可以看出,系统内存中的几何形体数据和纹理数据被送入显存当中并通过GPU渲染管线完成渲染。几何形体数据由显存直接送入顶点处理器,而纹理数据则需要由片段处理器中的采样器以采样的方式送入渲染管线参与计算。渲染完成后的结果数据被送入到帧缓冲器中用来显示,还可以由帧缓冲器输出到显存中以纹理的形式保存。
由OGRE渲染引擎实时渲染到屏幕上的红外场景数据,以图像数据的形式存在于每一帧渲染前的GPU缓存中。首先通过图像数据输出模块完成从GPU的缓存中实时高帧频提取红外场景图像数据到内存中的工作,然后通过实时网络对内存中数据进行动态传输。数据传输流如图12所示。

图9 实时网络图像生成模式流程图Fig.9 Flow chart of real-time network image generation scheme

图10 本机图像生成模式流程图Fig.10 Flow chart of local image generation scheme
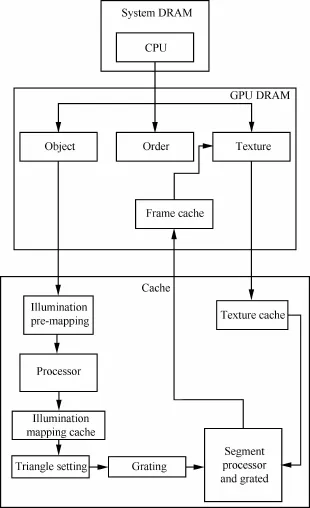
图11 图形处理器(GPU)体系结构Fig.11 Architecture of graphics processing unit(GPU)
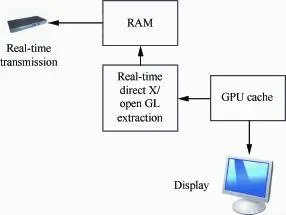
图12 数据传输流图Fig.12 Scheme of data transmission
图像数据通过驱动控制系统转换为电信号,驱动基于MOS电阻阵列的图像转换器硬件工作,产生红外场景图像。
电阻阵列的工作原理是通过电流加热电阻单元从而产生红外辐射,利用微电子技术和CMOS工艺在硅片上制造大规模的微型电阻阵列;每个电阻单元构成一个像素点,可以被单独选址并施加不同的驱动电流。同时,每个电阻单元在设计上都尽量与周围的单元进行隔热化处理,并且芯片辅以半导体制冷器件和水冷装置进行散热。这样,通过控制不同电阻单元的驱动电流就能产生动态的、温度可变的红外图像。
电阻阵列的红外辐射强度随时间的变化是阶跃式的,每个像元的温度在没有被驱动电流驱动的时候始终保持不变,只有施加驱动电流时才会产生热辐射;同时,由于散热装置的存在,电阻单元会达到一个热平衡状态。一旦驱动电流停止,热量会迅速被带走;电流发生改变时电阻单元会重新达到一个热平衡状态,从而产生另一种不同强度的辐射。
电阻阵列驱动控制系统主要包括:电源供电模块、图像传输模块、信号转接模块、D/A驱动模块、前端逻辑处理模块、环境控制系统(包括抽真空系统和冷却系统)和计算机系统。图13为红外图像生成系统的结构框图。

图13 红外图像生成系统的结构框图Fig.13 Structure diagram of infrared radiation image generator system
其中,电源系统主要完成电阻阵列和驱动系统的供电;图像数据传输系统主要完成图像数据在计算机与前端驱动盒之间的交互;信号转接板主要完成电阻阵列前端驱动盒内的信号转接,实现电源及信号的转接和互连;接受电阻阵列驱动逻辑电路的控制,按照指定时序控制D/A的驱动,并完成模拟信号的调理工作;逻辑处理模块位于图像数据传输板和D/A板之间,准确接收由图像数据并对其进行缓冲处理,并准确提取图像数据,完成电阻阵列的驱动逻辑设计;环境控制系统主要用于保证电阻阵列工作的真空环境和低温环境[18-20]。
3 与线下图像生成技术的比较
目前半实物仿真试验中图像的生成多依靠线下生成、试验中播放的方式实现。
目标模型的建立是通过图像生成计算机来实现的,主要包含以下几个步骤:①确定仿真目标的参数,如当前主流战机苏27、F15等目标的形体尺寸特征、红外辐射特征以及干扰投放方式等资料;②根据目标的形体特性建立三维模型;③建立目标及干扰的辐射模型,包括机体温度分布、能量衰减及校正等;④建立目标的飞行数据,包括弹目距离、姿态角等的变化、干扰的投放,以及运动轨迹求解;⑤合并生成驱动文件。
对目标三维模型的建立是通过建模软件3DS MAX来实现的。根据典型目标形体特征按比例进行建模,建模尺寸与实际目标尺寸相同。由于机体各部位红外辐射情况不一致,因此在建模时应将机体分为多个不同的区域,以便赋予不同的温度,模型分块如图14所示。
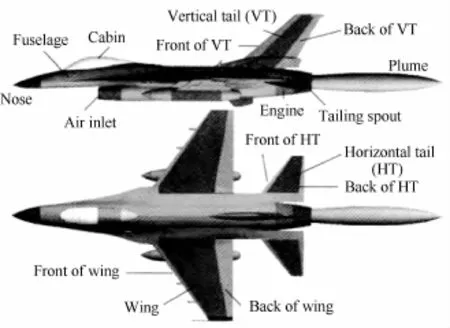
图14 模型分块图Fig.14 Partitions of module
通过外场实测数据或商业软件仿真得到的数据对每个分块赋予不同的温度值,完成飞机形体及红外特性建模。通过输入弹道飞行时间,起始位置和终点位置目标的距离,偏航角、俯仰角和滚转角等姿态数据,以及诱饵弹的投放参数等生成目标及干扰的飞行数据脚本文件,最终将目标和干扰的三维模型、飞行数据脚本文件及其辐射特性进行合并后生成图像驱动文件序列,驱动目标模拟器生成动态红外图像。
这种生成方式操作较为繁琐,仅能生成背景较干净的飞机和干扰等的图像,对复杂场景如空中云层、地面物体等背景则难以生成。此外,由于区域分割较粗糙,会导致图像灰度没有自然过渡,缺乏层次感,逼真度较差。一旦条件发生更改,还需要重新生成图像文件,效率十分低下。而文中研究的实时红外场景生成技术可以很好地克服线下生成图像的不利因素,实时、高效地生成更为逼真的目标和复杂多样的红外场景,简化了场景生成的流程,大幅提高了仿真试验的效率。
4 技术应用效果
本文所提的红外场景生成技术解决了实时图像生成及电阻阵实时驱动问题,能够实时、快速地驱动电阻阵生成红外图像以供红外成像制导武器接收。通过热像仪对图像进行采集,得到如图15和图16所示的图片。
图15为电阻阵列生成的3架飞机在山地背景飞行的效果,底部的山地及远处的地平线富有层次感,整个场景较为真实。图16为生成的某型战机不同姿态下的红外图像及投放干扰的效果。在图16中,战机不同区域有着不同的温度分布,纹理细节较为丰富。

图15 飞机及地形的红外图像Fig.15 Infrared radiation scene of airplanes and terrain
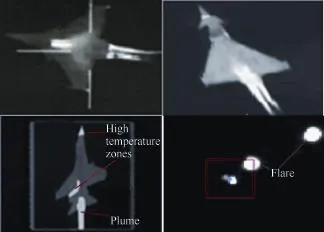
图16 飞机细节及干扰弹的红外图像Fig.16 Infrared radiation images of airplanes’textures and flares
5 结论
1)该红外场景生成技术解决了红外场景实时生成在半实物仿真系统中的应用集成问题,并通过多模式的动静态仿真和测试试验对算法进行了验证。
2)克服了以往须事先生成红外图像序列或图像数据,然后在试验中播放的繁琐流程,简化了人工操作,极大地提高了试验效率。
3)采用基于可见光图像调制的红外纹理生成技术生成细腻的物体红外纹理,丰富了生成的目标的细节,使目标更为逼真。
4)由于利用现有的高程数据生成较复杂的场景,减少了图形工作站的运算时间,提高了运算速度,满足了高帧频条件下的实时图像生成。
5)将该红外场景生成技术应用于多种型号的半实物仿真试验中,取得了良好的效果。
[1]Gao H,Zhao S Q.Exploration of applications of IR image simulator[J].Infrared Technology,2014,36(5):409-414(in Chinese).
高辉,赵松庆.红外成像目标模拟器的应用探索[J].红外技术,2014,36(5):409-414.
[2]Zhao X S,Wu G S,Zhao S Q,et al.Target image generation technology in the infrared imaging guidance hardware-in-the-loop simulation[J].Measurement & Control Technology,2013,32(7):153-156(in Chinese).
赵西帅,吴根水,赵松庆,等.红外成像制导半实物仿真目标图像生成技术[J].测控技术,2013,32(7):153-156.
[3]Chen Y.Study on the simulation of multispectral infrared images[D].Wuhan:Huazhong University of Science and Technology,2011(in Chinese).
陈云.红外多光谱图像仿真研究[D].武汉:华中科技大学,2011.
[4]Gerhart G,Martin G,Gonda T.Thermal image model [C]//Proceedings of SPIE.Bellingham,WA:SPIE,1987:3-9.
[5]Jr Sheffer AD,Michael Cathcart J,Faust N L.Highfidelity infrared scene simulation at Georgia Tech[C]// Proceedings of SPIE.Bellingham,WA:SPIE,1996:142-152.
[6]Savage J,Coker C,Thai B,et al.IRMA 5.1 multi-sensor signature prediction model[C]//Proceedings of SPIE.Bellingham,WA:SPIE,2005:199-211.
[7]Latger J,Cathala T,Douchin N.Simulation of active and passive infrared images using the SE-WORKBENCH[C]// Proceedings of SPIE.Bellingham,WA:SPIE,2007:654302-1-15.
[8]Shao X P,Zhang J Q,Xu J.Study of modeling natural infrared textures[J].Journal of Xidian University,2003,30(5):612-616(in Chinese).
邵晓鹏,张建奇,徐军.一种自然红外纹理的生成方法[J].西安电子科技大学学报,2003,30(5):612-616.
[9]Huang X,Zhang J Q,Zhang S Z,et al.Realistic infrared image generation method of target[J].Infrared and Laser Engineering,2013,42(4):1084-1088(in Chinese).
黄曦,张建奇,张绍泽,等.目标高真实感红外图像生成方法[J].红外与激光工程,2013,42(4):1084-1088.
[10]Xu C S,Zhang J Q.Study of plane wake IR simulation based on the particle system[J].Electronic Science and Technology,2009,22(8):59-61(in Chinese).
许春圣,张建奇.基于粒子系统的飞机尾焰红外仿真方法研究[J].电子科技,2009,22(8):59-61.
[11]Reeves W T.Particle systems—A technique for modeling a class of fuzzy objects[J].ACMTransaction on Graphics,1983,2(2):91-108.
[12]Li Q C,Yang G B,Wang X J.Particle system based fireworks modeling and its algorithm simulation[J].Journal of System Simulation,2009,21(8):2179-2184(in Chinese).
李清畅,杨高波,王小静.基于粒子系统的焰火建模及其算法仿真[J].系统仿真学报,2009,21(8):2179-2184.
[13]Hong Y,Zhang K,Li Y J.Simulation and jamming model of infrared bait[J].Journal of System Simulation,2006,18(2):463-466(in Chinese).
洪洋,张科,李言俊.红外诱饵的干扰模型与仿真[J].系统仿真学报,2006,18(2):463-466.
[14]Jin Z Z,Du WH,Wang X,et al.The research of infrared decoy modeling and visual simulation[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(6):31-38(in Chinese).
金政芝,杜文红,王星,等.红外诱饵弹建模与视景仿真实现研究[J].弹箭与制导学报,2010,30(6):31-38.
[15]Sun Y,Li XY,Li M.Study on GPU combined OGRE technology in infrared scene simulation[J].Journal of System Simulation,2013,25(8):1935-1939(in Chinese).
孙云,李晓燕,李敏.GPU结合OGRE技术在红外场景仿真中的应用研究[J].系统仿真学报,2013,25(8):1935-1939.
[16]Cai Z C,Wei Z,Ling Y,et al.Research based on OGRE particle system rending of fireworks[J].Computer Technology and Development,2011,21(10):88-91(in Chinese).
蔡政策,魏臻,凌勇,等.基于OGRE粒子系统在烟花渲染中的研究[J].计算机技术与发展,2011,21(10):88-91.
[17]Reeves W T,Blau R.Approximate and probabilistic algorithms for shading and rending structured particle system [J].Computer Graphics,1985,19(3):313-322.
[18]Huang Y,Wu G S,Zhao S Q,et al.Research of driver method for 256×256 MOS resistor array[J].Aero Weaponry,2013(6):39-42(in Chinese).
黄勇,吴根水,赵松庆,等.256×256元MOS电阻阵驱动方法研究[J].航空兵器,2013(6):39-42.
[19]Zhang A J,Wang S C,Zhang J S,et al.Design of a realtime image generating system for simulation of IR imaging guidance missiles[J].ElectronicsOptics & Control,2007,14(1):91-95(in Chinese).
张安京,王仕成,张金生,等.红外成像制导仿真图像实时生成系统设计与研制[J].电光与控制,2007,14(1):91-95.[20]Li R,Dong M Z.Study on real-time control of IR imaging
simulator based on high frame rate MOS resistor arrays
[J].Aero Weaponry,2009(6):50-53(in Chinese).
李睿,董敏周.高帧频MOS电阻阵红外成像目标模拟器实时控制研究[J].航空兵器,2009(6):50-53.
高辉 男,硕士,工程师。主要研究方向:红外目标与环境特性半实物仿真。
Tel:0379-63383925
E-mail:gaohuialex@163.com
赵松庆 男,硕士,高级工程师。主要研究方向:红外目标与环境特性半实物仿真。
Tel:0379-63383925
E-mail:zsq_5198@sina.com
吴根水 男,研究员。主要研究方向:红外制导系统半实物仿真。
Tel:0379-63383925
E-mail:genshuiwu@163.com
陈海燕 女,工程师。主要研究方向:红外目标与环境特性半实物仿真。
Tel:0379-63383925
E-mail:36337728@qq.com
赵西帅 男,硕士,工程师。主要研究方向:红外目标与环境特性半实物仿真。
Tel:0379-63383925
E-mail:344958762@qq.com
URL:www.cnki.net/kcms/detail/11.1929.V.20150616.1559.002.html
lnfrared radiation scene generation technology based on resistor array
GAO Hui1,*,ZHAO Songqing1,2,WU Genshui1,2,CHEN Haiyan1,ZHAO Xishuai1
1.Department of Guidance & Control System,China Airborne Missile Academy,Luoyang 471009,China
2.Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons,Luoyang 471009,China
According to the requirements of the infrared radiation imaging guidance hardware-in-the-loop simulation test,the technology of infrared radiation image generation was researched.The infrared image generation technology based on visible light modulation method was developed,including scene modeling,infrared radiation character of target and scene analysis. Meanwhile,the airplane,terrain and the infrared decoy modeling technology were discussed,and the method of infrared radiation scene generation was consummated.As the input information of the resistor array,the infrared radiation scene data,which was generated by the technology discussed in the paper,can drive the resistor array generate the infrared radiation scene.The infrared radiation scene that was detected by the infrared radiation camera,was fine and close to the reality,which can provide more accurate environment for infrared radiation imaging guidance hardware-in-the-loop simulation test.
hardware-in-the-loop simulation;infrared radiation texture generation;infrared radiation scene modeling;target and decoy modeling;resistor array
2015-01-16;Revised:2015-04-15;Ac cepted:2015-06-07;Published online:2015-06-16 15:59
.Tel.:0379-63383925 E-mail:gaohuialex@163.com
V249
A
1000-6893(2015)09-2815-13
10.7527/S1000-6893.2015.0172
2015-01-16;退修日期:2015-04-15;录用日期:2015-06-07;网络出版时间:2015-06-16 15:59
网络出版地址:www.cnki.net/kcms/detail/11.1929.V.20150616.1559.002.html
.Tel.:0379-63383925 E-mail:gaohuialex@163.com
引用格式:Gao H,Zhao S Q,Wu G S,et al.lnfrared radiation scene generation technology based on resistor array[J].Acta Aeronautica et Astronautica Sinica,2015,36(9):2815-2827.高辉,赵松庆,吴根水,等.基于电阻阵列的红外场景成技术[J].航空学报,2015,36(9):2815-2827.
猜你喜欢
系统仿真技术(2022年4期)2023-01-17 13:02:00
科普童话·神秘大侦探(2022年4期)2022-05-26 19:57:56
作文小学高年级(2022年2期)2022-03-03 08:54:32
科学技术与工程(2020年7期)2020-04-22 09:55:30
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
导弹与航天运载技术(2017年4期)2017-09-03 05:05:28
Coco薇(2017年8期)2017-08-03 15:23:38
现代防御技术(2016年1期)2016-06-01 12:13:27
Coco薇(2015年5期)2016-03-29 23:22:15
