
扩展卡尔曼滤波观测器在异步电机断电情况下转子转速检测的应用
2015-11-05 02:30张熹
中国科技纵横 2015年2期
张熹
(北京航空航天大学自动化科学与电气工程学院,北京 100191)
扩展卡尔曼滤波观测器在异步电机断电情况下转子转速检测的应用
张熹
(北京航空航天大学自动化科学与电气工程学院,北京 100191)
异步电机矢量控制策略需了解转子转速信息以实现磁场定向,为了该目的,本文提出了应用扩展卡尔曼滤波(EKF)观测器在电机断电情况下对转子的速度进行检测。EKF很好的实现了转速的检测。但是异步电机是一个非线性,含有参数变化和扰动的系统。因此本文分析了EKF对电机参数变化之鲁棒性并提出两种方法来提高观测器鲁棒性。仿真结果表明,这两种方法对EKF的检测误差起到了很好的修正作用。
扩展卡尔曼滤波观测器 异步电机转子转速检测 鲁棒性
交流异步电动机具有结构坚固,造价低廉,工作可靠等突出优点。为了解决电机断电情况下再启动时产生的极大力矩损害电机的问题,高性能电机驱动系统通常采用矢量控制等驱动控制策略,这些控制策略需要了解转子的速度以实现磁场定向。为了克服机械式传感器给系统带来的缺陷,转子转速检测技术应运而生。
作为转子转速检测技术的一种,扩展卡尔曼滤波器(EKF)由R. E.Kalman在1960年提出[1],之后在各个领域获得了广泛的应用。扩展卡尔曼滤波器实际上是一个全阶状态观测器,通过使用含有噪声的信号对非线性系统进行实时递推获得最优状态估计。由于其可实现性强、方法简单、收敛迅速等优点,逐渐成为非线性系统状态估计中应用广泛的算法。EKF法避免了微分运算,采用一种迭代形式进行非线性估计,通过调节误差协方差阵来调节状态估计的收敛速度[2-3]。此外,与其它转速估计算法相比,扩展卡尔曼滤波器法有非常强的抗干扰能力。由于EKF是建立在系统的随机过程模型上,因此针对交流异步电机模型的非线性性和不确定性,EKF估计性能优越,表现出较好的鲁棒性和抗噪能力,成为目前异步电机转速估计问题研究的热点[4-5]。
文献[6]利用扩展卡尔曼滤波器,将转子转速看成一个状态量,通过测量电机定子侧的端电压和电流在线估计电机转子速度,文章研究了采样周期、滤波器参数和电机参数对转速在线估计性能指标的影响,通过仿真实验对比分析证明该方法进一步优化了用扩展卡尔曼滤波器对电动机转速的辨识。
由于电机是一个非线性、多变量、强耦合的系统,电机参数也会受到温度及磁场的影响,因此如何获得准确的电机参数,建立较为精确的数学模型,在异步电机的高动态性能控制系统中显得尤为重要。许多学者也进行了参数变化对矢量控制影响的分析,文献[7]中C.Attaianese等对参数变化产生的无速度传感器转速估计的影响进行了研究,通过推导异步电机的转速表达式,把转速表示成电机参数的因变量,进而分析电机各参数变化对转速估计的影响。
本论文的主要工作就是设计实现EKF观测器对转子转速的检测,对EKF对于电机参数变化之鲁棒性进行分析及改进。
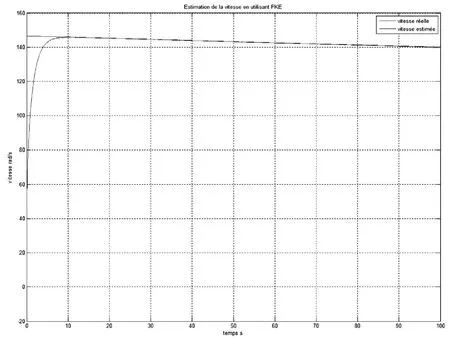
图1 EKF观测器对转子转速检测结果
1 EKF观测器的设计与实现
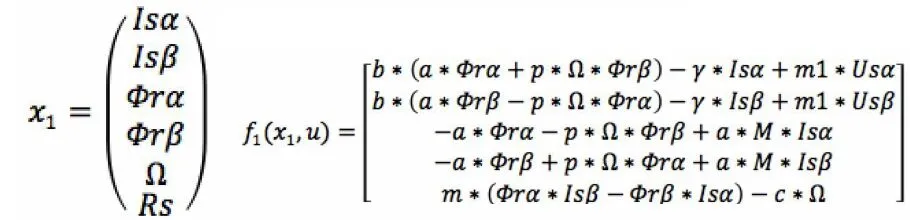
EKF观测器方程建立,EKF原理是基于非线性系统,利用估计误差实时修正观测器的增益矩阵(K),以得到优化的状态估计向量。EKF观测器在建立方程的过程中引入了噪声量,以下系统状态方程的表达[8]:
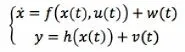
上式中w(t)与v(t)为方差为Q(t)和R(t)、零均值的高斯白噪声。我们将其表达为:

观测器的建立分为三步:

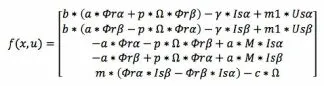
式中F(t)与H(t)为函数f的雅克比矩阵:

EK F观测器S im u l in k建模下图为异步电机与E KF观测器Simulink模型。
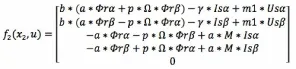
2 加入电机参数估算器的EKF原理
加入定子电阻估算器的EKF原理,为了优化EKF对于定子电阻值变化的鲁棒性,我们向系统中添加定子电阻估算器,即将电机定子电阻添加到电机状态向量中。

因此:
3 仿真和实验结果
异步电机参数如下:定子电阻Rs=26.9mΩ,定子电感Ls= 6.67mH,转子电阻Rr=6 mΩ,转子电感Lr=6.6 7mH,互感M= 6.5mH,电机转动惯量J=20kg.m2,摩擦系数fv=0.1N.m.s,电机极数p=2。在EKF观测器的设计中,虽然是基于电机确定性的方程,但存在定子电流和定子电压的测量误差,这些不确定性和测量误差都纳入协方差矩阵Q和R中。本论文中对E KF观测器实现的仿真中:Q(t)=diag(1,1,1,1,5000),R(t)=diag(0.52,0.52)。误差协方差预报阵的初始值P0=diag(0,0,0,0,24649)。在加入Rs估算器为改进EKF观测器鲁棒性的仿真实验中:Q(t)=diag(1,1,1,1,106,10(0)6),R(t)=diag(0.52,0.52),P0=diag(0,0,0,0,10000,100)。在加入Rs与Ls估算器为改进EKF观测器鲁棒性的仿真实验中:QRs(t)=diag(1,1,1,1,107,105),QLs(t)=diag(1,1,1,1,100),R(t)=diag(0.52,0.52),P0Rs=diag(0,0,0,0,10000,0),P0Ls=diag(diag(0,0,0,0,1)。在电机断电的过程中定子电阻会随时间的推移而发生变化,本论文在验证EKF观测器对电机参数变化之鲁棒性的试验中设定定子电阻为实际值的1.2倍,在通过加入Rs估算器对EKF观测器进行改进的的仿真实验中定子电阻设定为由1.3Rs至Rs的线性变化。
图1为EKF观测器在无电机参数变化的情况下对转子转速信息检测的实验结果,验证了EKF观测器的可行性。
4 结语
本文研究了基于EKF观测器的异步电机转子转速检测方法对于电机参数变化之鲁棒性并提出了优化方案。在EKF观测器系统中添加电机参数估算器,实时对对应变量进行更新以优化观测器增益矩阵能够很好的解决该参数对观测器效率的影响。仿真结果显示,在观测器系统中添加定子电阻及定子电感估算器之后EKF观测器可精确估计转子转速及相对应的电机参数,但观测速度有所下降,因此在实际应用中应该考虑电机参数估算器与EKF观测器系统相关参数耦合的影响,以达到提升EKF观测效率提升的目的。
[1]R. E. Kalman,A new approach to linear filtering and prediction problems.Taransaction of the ASME-Journal of Basic Engineering[J],1960:35-45.
[2]Barut Murat,Bogosyan O.Seta, Gokasan Metin.An EKF-based estimator for the speed sensorless vector control of induction motors[J].Electric Power Components and Systems,2005,33(7):727-744.
[3]Fea-Jeng Lin.Application of EKF and RLS estimators in induction motor drive[C].PESC'96 Record,27th Annual IEEE,1996,1:713-718.
[4]张猛,肖曦,李永东.基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J].中国电机工程学报,2007(36):36-40.
[5]Barut Murat,Bogosyan O.seta,Gokasan Metin.EKF based estimation for direct vector control of induction motors[C].IECON Proceedings,2002,2:1710-1715.
[6]Young-Seok Kim,Sang-Uk Kim,Lee-Woo Yang.Implementation of a speed-sensorless control of induction motor by reducedorder extended Kalman filter[C].APEC'95,Conference proceedings,1995,1(10):197-203.
[7]C.Attaianese,G.Fusco,I.Maronfiu.and A.Perfetto.Parameter sensitivity of speed estimation in speed sensorless induction motor drives[C].Advanced Motion Control.AMC'96-MIE.Proceedings,1996,1:162-167.
[8]Leonardo Ascorti,An Application of the Extended Kalman Filter to the Attitude Control of a Quadrotor,2012.
张熹(1990—),山西平遥人,硕士研究生,研究方向:自动化科学与电气工程-机械电子方向。
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年11期)2014-04-04
