
WSNs中基于隐马尔科夫模型的目标识别问题研究
2015-11-04 09:06:57杨明霞王万良邵鹏飞
计算机工程与应用 2015年22期
杨明霞,王万良,邵鹏飞
1.浙江工业大学信息学院,杭州310023
2.浙江工业大学计算机学院,杭州310023
3.衢州学院电气与信息工程学院,浙江衢州324000
4.浙江万里学院电子信息学院,浙江宁波315100
WSNs中基于隐马尔科夫模型的目标识别问题研究
杨明霞1,3,王万良1,2,邵鹏飞1,4
1.浙江工业大学信息学院,杭州310023
2.浙江工业大学计算机学院,杭州310023
3.衢州学院电气与信息工程学院,浙江衢州324000
4.浙江万里学院电子信息学院,浙江宁波315100
由于无线传感器网络(Wireless Sensor Networks,WSNs)资源受限,如何有效利用资源,提高目标辨别的准确度,是WSNs中目标识别系统的研究难题。以隐马尔科夫模型为分类框架,对一个声音传感器阵列节点簇内的目标识别问题进行建模;基于节点信号的空间关联性,改进了子节点Viterbi最大似然序列的计算状态,设置了子节点报送间隔,从而有效地判别局部状态。实验证明,改进后的算法在维持判别正确率的同时降低信息传输量10%以上。
目标识别;无线传感器网络;隐马尔可夫模型;维特比算法
1 引言
在无线传感器网络的很多应用场景中,基于声音信号对不定数量的监测目标进行分类在很多实际应用中是一项关键任务[1-3],例如战场监测,边界检测以及交通控制等。不定数量的车辆类型及数目的检测,在道路交通流量信息及规划、智能运输系统的军事和民用应用等问题中都有广泛应用。声学传感器成本较低,信号数据易于处理,利用声学传感器组成的无线传感器网络来处理一定区域内的车辆检测问题,具有良好的便捷性和灵活性,同时满足成本控制的要求[4-5]。美国科学应用国际公司采用无线传感器网络构建了一个电子防御系统,为美国军方提供军事防御和情报信息。系统采用多个微型磁力计传感器节点来探测监测区域中是否有人携带枪支、是否有车辆行驶,同时,系统利用声音传感器节点监测车辆或者人群的移动方向。
在WSNs中,由于通信带宽受限以及无线通信能耗较大的因素,单个节点往往不直接传送原始特征向量,而是对特征向量进行本地分类,给出目标对象类型信息的局部判断结果,再将分类结果编码发送到网络中心,对多个分类结果融合并得到最终的决策信息,很多研究致力于改进这个过程的性能[7-15]。Duarte等[7]研究了分布式无线传感器网络中移动车辆的识别问题;实验(SensIt)对一个包含820 MB原始时序数据和70 MB预处理数据的数据集(来源于实验现场的声学信号),提取了频谱特征的向量,设定模型并检验分类结果。Aljaafreh[8]在SensIt[7]数据集上,采用多假设检验利用隐马尔科夫模型(Hidden Markov Model,HMM)作为分类框架,HMM的状态对应监测区域内车辆的分布状况。每一个时刻,子节点依据接收到的音频信号做出一次分类判断并将结果传送给主节点,由主节点判断给出监测区域内车辆状态。HMM降低计算负载,假设检验也提高了分类精度。利用HMM对目标对象状态信息进行建模,能利用目标内在状态的时间关联性达成较好的识别效果,同时较好地节省传输的数据量[9]。

图1 利用WSNs目标分类过程
本文以SensIt[7]已提取的特征集为研究对象,在考虑WSNs能源受限的基础上研究一种改进的目标分类方法和数据融合策略。主要思想为:参考Aljaafreh[8]基于HMM的方法的基础上,通过对各子节点工作状态打分,改进子节点viterbi最大似然序列的计算状态,从而改进簇内通信策略,减少传输信息量。
2 隐马尔科夫模型
在某些实际情形和系统中,各个时刻可以观察到的现象状态是由此时不可见的隐藏状态影响并驱动的,它们是模型中实际存在的物理抽象结构,而且往往这些隐藏状态才能反应事物的本质并提供有益的帮助,因此如何通过可观察的现象推算各个时刻的隐藏状态具有重要意义;在某些情况下可以把这种过程建模为隐马尔科夫模型(HMM)来解决问题。HMM最早在信息论中得到应用的,之后扩展到自然语言处理并取得了较好的效果,在手写输入、图像识别、多维气象系统等领域也得到了较多应用。
与普通马氏过程相比,隐马尔科夫模型是双重随机过程,不仅底状态转移之间是个随机事件,输出也由同时刻的底状态对应的随机分布决定,由状态序列{qt,t≥1}(底过程/隐藏过程)和观察序列{Ot,t≥1}(输出/表现)构成。

图2 隐马尔科夫模型
本文以模型五元组(q,O,π,A,B)来描述HMM。
在HMM模型训练阶段(学习过程),如果能人为认定底过程,则可通过观察法直接计数得到模型参数,如果没有底过程信息,一般采用EM(Expectation-Maximization)算法估计底过程的状态转移阵A和状态-输出概率分布等参数;在应用阶段,在设定的截止时刻T可以根据观察状态序列O(T)采用Viterbi算法计算得到最大似然状态序列作为状态序列的识别结果。
Viterbi算法提供了一个根据可观察序列计算隐藏序列的很高效的方法,它利用递归来降低计算复杂度,并且使用之前全部的序列来做判断,可以很好地容忍孤立的噪声。在实际应用中,通常针对HMM的设定、训练及应用阶段使用的算法做一些合理的调整,以取得更为理想的效果。
3 问题描述与建模
3.1问题描述
本文以车辆识别为例,探讨了利用簇内多个节点传感器接受的声音信号频谱特征序列联合识别节点簇所在局部区域内车辆的个数和类别。本文讨论的车辆音频特征序列来源于DARPA/IXOs SensIT(Sensor Information Technology)程序中的SITEX02[7]。场景中包含两种类型车辆:履带式汽车(简称小车,记为0)和重型载货汽车(简称大车,记为1)。数据集记录了一段时间内某个簇内运行目标的原始数据信息,采用FFT变换得到的声音频谱信号的低频部分用于分类实验。
整个监控区域的地图如图3所示[7],面积为(900×300)m2矩形区域,包含一条东西向和一条南北向的道路以及两条道路的三角交叉区域,道路两侧及交叉路口一共部署了75个WIN NG2.0节点[10],节点间距20~40 m。每个节点装配有三种感知模块:声音传感器、磁性传感器和红外传感器,其中声音传感器的采样率为4 960 Hz。节点具有一个A/D转换模块和在线可编程DSP,可以将模拟信号数字化并存入缓存。按照地理位置将该区域划分为不同子区域,子区域内的节点组织为一个簇并以一至两个节点为簇首节点,负责调配本簇内子节点的通信路由和协作算法。簇内每个节点上的初步分类结果发送到簇首,由簇首来进行局部的数据融合。
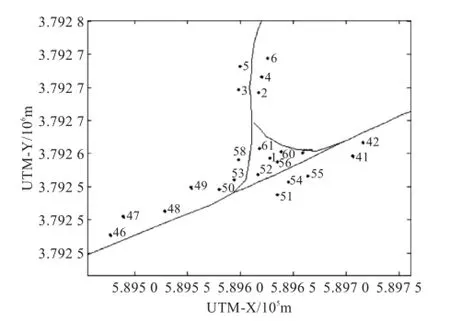
图3 SensIt项目监测区域节点布局图
3.2问题建模

表1 底过程状态集合S
以状态编号来表示状态,则状态空间S:=(1,2,3,4,5,6)。设某个时刻最多一辆车驶入或驶出簇区域,并且车辆驶出事件和车辆驶入事件不同时发生,则状态之间的转移特性如图4所示。HMM的隐藏状态(底状态),代表簇区域内实际的车辆运行情况;观察值即采集到的音频信号向量,由于其复杂性不易表达略去图形表达。

图4 底状态转移阵
3.3算法描述
本文在保持目标检测正确率的同时,以降低簇内子节点通信量为目标展开研究。对簇首节点处理程序、子节点在HMM应用阶段的程序以及主节点和子节点之间的数据通信策略进行改进。
(1)模型训练阶段
模型训练阶段,依据SENIT数据集的车辆音频特性及随机噪声特性产生各个子节点接收到的音频离散谱,因为此阶段状态列是已知的,所以直接通过记录统计并利用经验分布得到HMM模型的各项参数:底过程马氏转移阵、各状态的状态-输出转移概率分布等HMM模型参数:q,O,π,A,B。
记训练总时段共有T个计数点时刻,期间人工观察记录系统的状态列q(T),设处于状态i的计数点共有ni、此计数点时刻状态为i下一时刻点状态跳转为i′的时刻计数为nii',记节点j上HMM的隐藏状态马氏转移概率阵为
,则有:

对于节点j上HMM的状态-输出转移分布{P(j)(Ot∈ U|qt=Si),U⊆S*,i∈S},依据节点j的观察列1,2,…,T}及q(T),利用matalab的处理多维度的经验分布计算函数即可得到。
(2)识别阶段
识别阶段,子节点上调整前的算法和过程为:记子节点j在t时刻接收到的音频离散谱为观察值,在时刻t状态为i的最大似然路径概率为(i),则有:

φt表示时刻t时状态为i′的最大似然状态路径(序列)t-1时刻的值(状态回溯):

时刻T为止最大似然状态序列T时刻的状态:

递推回去,由t+1时刻状态得到最大似然状态路径序列t时刻的状态:


接下来描述本文对HMM识别阶段的工作过程所做的改进。
3.3.1主节点的处理过程——打分机制
时刻t,接受x个子节点报送的状态,结合记录的前n个时刻系统状态,簇首节点统一处理,得出判定分数最高的状态,作为区域此时的状态记录在stestn(t)并赋值给变量st。考虑WSN能量限制的需求,在主节点处理程序中加入对各子节点打分的机制,用以判断节点工作状况,确定停止工作的节点,最后将打分结果反馈给子节点。打分的计算方法为:如果所有节点状态判断都一致,则随机选取y个节点返回控制信号停止报送,即将此节点编号赋值给变量rsv;否则,若某个节点判断结果与簇首抉择结果及其他节点差距大(可能的因素有:车辆与此节点距离较远、此节点前几个时刻工作状态不佳、突发性的噪声干扰等),就把这个节点编号赋值给变量rsv。然后簇首节点发送信息(rsv,st)给各子节点,告知系统综合判断出的目前状态、选择的调整节点,至此主节点程序结束。
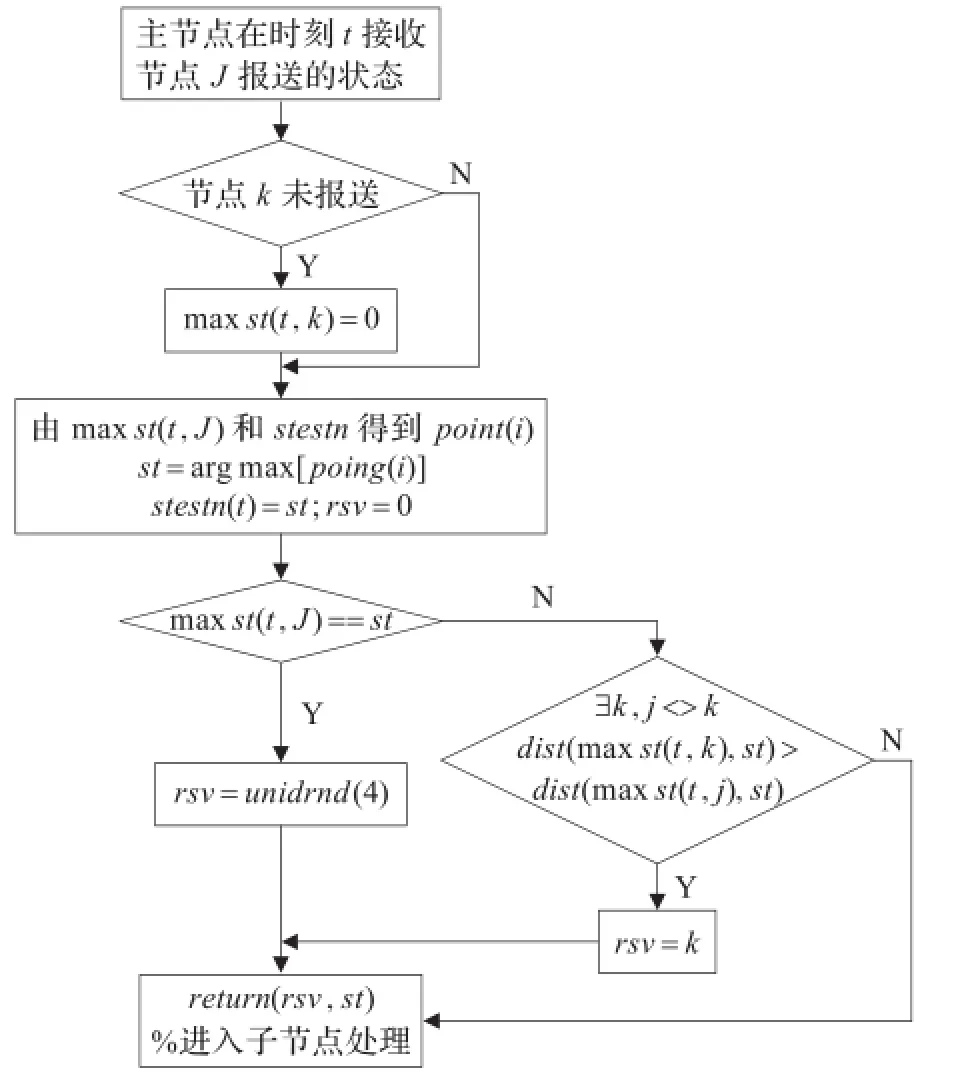
图5 主节点处理流程图
3.3.2子节点的处理流程——设置停止报送的时间间隔
具体过程为:子节点上接收簇首节点发送的rsv和st,检测自己的编号是否与rsv相同。为了减少子节点报送的通信开销,在子节点上选取以下策略:时刻t,若该节点编号j与接收到的rsv一致,则此节点从时刻t+1开始停止报送t_idle个时刻,并在该子节点上调整Viterbi算法记录的t时刻状态为st最大似然路径对应的概率值(st);其他情况则不做额外处理。

图6 子节点处理流程图
4 仿真及结果
在MATALAB中建立了仿真环境。M×M的矩形区域代表监控区域无线传感网器网络中的一个簇所在的子区域,簇中包含n个节点。节点采集到声音并且完成特征提取后,进行本地计算完成局部决策,将结果传送给簇首进行融合决策。训练阶段,使用的模拟序列长度3 000,针对每个噪声强度(β)进行了30次模拟,每次测试所用的序列长度为500。
4个节点的情况(n=4),每回合选取1个节点报停(y=1),结果如图7~图8所示。

图7 不同噪声强度下子节点平均通信量比值(n=4)

图8 不同噪声强度下两种情况的正确率(n=4)
不同噪声强度下子节点平均通信量比值,H0为不采用此策略的子节点平均通信量,H1采用改进策略后的子节点平均通信量;不同噪声强度下正确率均值比值。p1为采用改进策略后的正确率,p0为不采用此策略的正确率。正确率=判断正确的时刻段数/总的时刻段数,此处即:正确的次数/500。改进后的处理过程在不同噪声强度下正确率下降控制在1.3%以内,子节点平均通信量约减少了10%左右。
五个节点的情况(n=5),每回合分析选取两个子节点报停(y=2),结果如图9~图10所示。
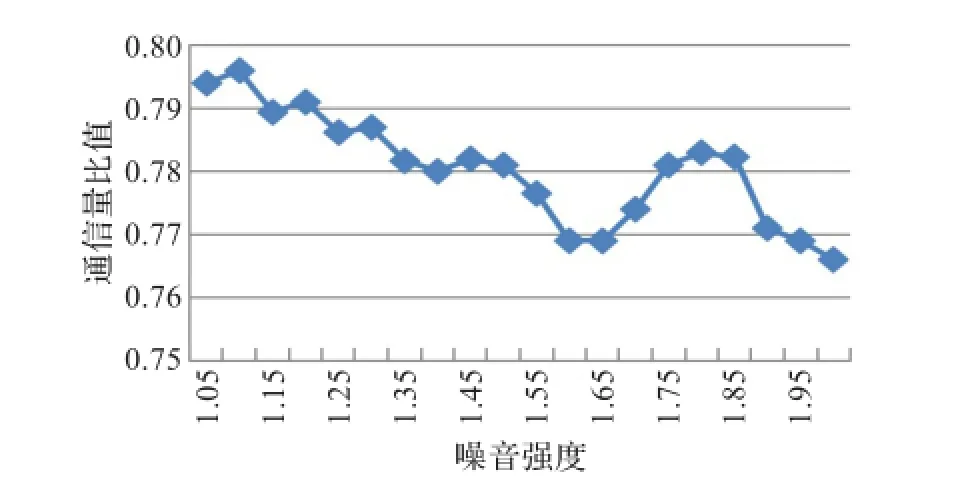
图9 不同噪声强度下子节点平均通信量比值(n=5)

图10 不同噪声强度下两种情况的正确率(n=5)
5 结论
本文讨论了在无线传感网中基于HMM利用声学信号对目标对象进行分类以及决策融合的问题。以HMM模型基础来解决文献[7]中的簇节点的决策融合。
通过采用HMM对目标对象状态信息进行建模,减少了假设状态的个数,通过对工作状态较差的节点进行调整以减少传输信息量,从而延长网络寿命。在测试阶段,主节点利用上一时刻综合判断结果,通知工作状态不好的子节点(如车辆距离子节点较远)对HMM状态进行调整,并在接下去的几个时刻停止向主节点报送本节点分类判断结果,避免无效的传输能量消耗。实验结果表明,该算法在维持辨别正确率的同时进一步减少了信息传输量。这提供了子节点能量较为有限的情形下延长系统工作寿命的有效方法。
由于本文对于子节点停报间隔的设置是随机的,可以进一步地研究报送间隔对于性能的影响;此外,在Viterbi算法上纠正路径也能够更加精确地获取分类信息,从而提高系统的性能。
参考文献:
[1]Padmavathi G,Shanmugapriya D,Kalaivani M.A study on vehicle detection and tracking using wireless sensor networks[J].Wireless Sensor Network,2010,2(2):173-185.
[2]李开明,张群,罗迎,等.地面车辆目标识别研究综述[J].电子学报,2014(3).
[3]Chen H,Tse C K,Feng J.Source extraction in bandwidth constrained wireless sensor networks[J].IEEE Transactions on Circuits and Systems-II:Express Briefs,2008,55(9):947-951.
[4]Kaia Y,Qia H,Jianminga W,et al.Multiple vehicle signals separation based on particle filtering in wireless sensor network[J].Journal of Systems Engineering and Electronics,2008,19(3):440-446.
[5]Drakopoulos E,Chao J J,Lee C C.A two-level distributed multiple hypothesis decision system[J].IEEE Transactions on Automatic Control,1992,37(3):380-384.
[6]黄轲.基于视觉感知的弱对比度车辆目标识别[D].北京交通大学,2014.
[7]Duarte M F,Hen Hu Y.Vehicle classification in distributed sensor networks[J].Journal of Parallel and Distributed Computing,2004,64(7):826-838.
[8]Aljaafreh A,Dong L.Hidden markov model based classification approach for multiple dynamic vehicles in wireless sensor networks[C]//2010 International Conference on Networking,Sensing and Control(ICNSC),IEEE,2010:540-543.
[9]Roberts W J,Sabrin H W,Ephraim Y.Ground vehicle classification using hidden Markov Models[R].Atlantic Coast Technologies Inc Silver Spring MD,2001.
[10]王宇婷.BP神经网络与HOG特征提取相结合的车辆识别技术在无线设备下的应用[D].长春:吉林大学,2014.
[11]Kotecha J H,Ramachandranand V,Sayeed A M.Distributed multitarget classification in wireless sensor networks[J]. IEEE Journal on Selected Areas in Communications,2005,23(4):703-824.
[12]Aljaafreh A,Al-Fuqaha A.Multi-target classification using acoustic signatures in wireless sensor networks:A survey[J]. Signal Processing-An International Journal(SPIJ),2010,4(4):75-246.
[13]Merrill W,Sohrabi K,Girod L,et al.Open standard development platforms for distributed sensor networks[C]// Proc SPIE—Unattended Ground Sensor Technologies and Applications IV4743,2002:327-337.
[14]Alkilani A,Shirkhodaie A.A survey on acoustic signature recognition and classification techniques for persistent surveillance systems[C]//Proc of SPIE Vol,2011,8392:83920U-1.
[15]Evans N.Automated vehicle detection and classification using acoustic and seismic signals[D].University of York,2002.
Target classification based on hidden Markov model in Wireless Sensor Networks.
YANG Mingxia1,3,WANG Wanliang1,2,SHAO Pengfei1,4
1.College of Information,Zhejiang University of Technology,Hangzhou 310023,China
2.College of Computer Science,Zhejiang University of Technology,Hangzhou 310023,China
3.Quzhou University,Quzhou,Zhejiang 324000,China
4.Zhejiang Wanli University,Ningbo,Zhejiang 315100,China
It is challenging to classify multiple targets in wireless sensor networks based on the time-varying and continuous signals.In this paper,Hidden Markov Model is utilized as a framework for classification.The states in the HMM represent various combinations of vehicles of different types.With a sequence of observations,Viterbi algorithm is used at each sensor node to estimate the most likely sequence of states.Simulation results show that it reduce transmission more than 10% while maintaining identification rate.
target classification;wireless sensor networks;hidden Markov models;Viterbi
A
TP3
10.3778/j.issn.1002-8331.1411-0350
国家自然科学基金面上项目(No.61379123);浙江省自然科学基金项目(No.LQ12F03011,No.LQ14F020005,No.LY13F030011);宁波市自然科学基金(No.2012A610016);2013浙江省重点实验室开放基金项目(No.2013026);衢州学院师资队伍建设基金(No.XNZQN201308)。
杨明霞(1979—),讲师,在读博士,主研究方向为智能信息处理。E-mail:37847098@qq.com
2014-11-26
2015-02-03
1002-8331(2015)22-0228-05
CNKI网络优先出版:2015-07-03,http://www.cnki.net/kcms/detail/11.2127.TP.20150703.1611.029.html
猜你喜欢
环球人物(2022年4期)2022-02-22 22:05:06
小资CHIC!ELEGANCE(2021年32期)2021-09-18 06:17:14
中华养生保健(2020年7期)2020-11-16 01:14:26
小太阳画报(2018年3期)2018-05-14 17:19:26
家教世界·创新阅读(2016年11期)2016-12-27 18:49:15
阅读与作文(小学低年级版)(2016年12期)2016-12-22 19:35:04
天津护理(2016年3期)2016-12-01 05:40:01
少年博览·小学低年级(2016年9期)2016-11-24 06:21:37
故事会(2016年15期)2016-08-23 13:48:41
汽车文摘(2015年11期)2015-12-02 03:02:53
