
飞机复合材料构件超声C扫描检测轨迹规划系统研究
2015-10-30 07:20:58黄光胜王美清杜福洲关雪松赵玉莹
制造业自动化 2015年10期
黄光胜,王美清,杜福洲,关雪松,赵玉莹
(1.北京航空航天大学 机械工程及自动化学院,北京 100191;2.哈尔滨飞机工业集团有限责任公司,哈尔滨 150066)
0 引言
复合材料与金属材料相比具有比重小、比强度高,比模量大等优点,其在航空制造业中的应用日渐增多,如美国波音787“梦想”飞机的复合材料用量达到50%,飞机的主要构件如水平尾翼、地板梁、整流罩、机舱门等都采用了复合材料[1]。然而,复合材料构件(简称复材构件)生产工艺的特点决定了其不可避免会产生分层、气泡、脱胶、夹杂等缺陷。但是,这些缺陷在复材构件中是不被允许的,因此,需要对复材构件进行全覆盖无损检测。超声波无损检测,尤其是超声C扫描,由于显示直观、检测速度快,已成为航空件等大型复材构件普遍采用的超声检测技术[2]。为了提高复材构件无损检测的效率,国内的航空企业纷纷从国外采购了先进的超声C扫描设备[3]。这些先进设备除提供“示教”功能外,大多还支持APT(Automatically Programmed Tool)格式轨迹文件驱动的自动检测,这为实现复材构件的设计、制造、检测一体化提供了可能。其中,模型驱动的检测轨迹规划问题是关键。
针对超声检测路径规划问题,吴思源等针对CAD模型未知曲面工件的超声检测路径规划问题展开研究,首先利用超声测距方法重构了曲面工件模型,然后采用非等参数法或曲面分块法对重构的曲面模型进行扫描路径规划,这些规划算法都是针对一个完整的曲面来进行扫描点规划的[4,5]。李天宁对由柱形、圆锥或弧形等构成的复杂构件的轮廓扫描路径规划问题展开研究,提出了按特征分别进行轮廓轨迹规划的方法,但所提出的方法主要针对连续完整的初等解析曲面的扫描轨迹规划问题[6]。
然而在航空制造业中,存在着大量的曲面构型的复材构件,其表面是由组合曲面构成的自由曲面,并含有若干槽和装配孔。由于这些特点,航空企业使用的CAD/CAM软件,如CATIA不能直接基于复材构件的三维CAD模型生成满足要求的扫描轨迹。企业为了生成超声C扫描轨迹,只能对构件的三维CAD模型进行重构,包括构造整合面、设定坐标系、构建参考元素等操作,再利用CAM软件利用加工的方法变相生成扫描轨迹。然而此过程不仅对操作人员要求高,而且效率低,已成为影响复材构件超声检测效率提高的瓶颈之一。基于此,本文对复材构件超声C扫描检测轨迹规划技术展开研究,提出三维模型驱动的自动化扫描路径规划方法,并开发相应的软件系统,以达到简化操作,提高检测效率的目的。
1 复材构件超声C扫描轨迹规划系统需求分析
复材构件的超声C扫描轨迹形式和特点由复材构件的结构特点、超声C扫描无损检测的工艺要求和检测设备的功能特点决定。
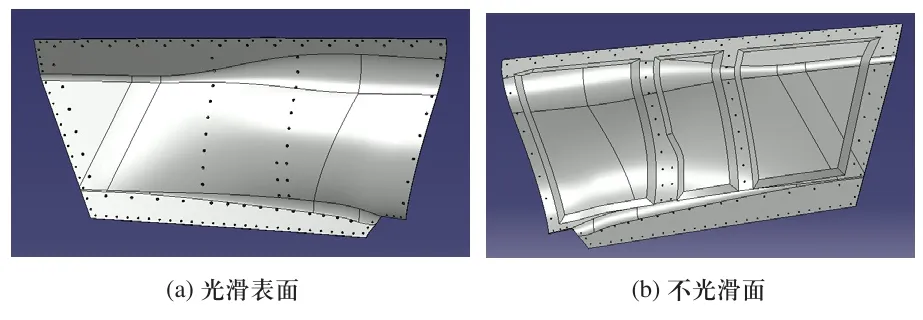
图1 典型复合材料构件
典型的飞机复材构件,其表面是由组合曲面构成的自由曲面,并含有若干特征孔(或槽),背面有凸台或凹槽(如图1(a)、(b)所示)。在进行超声C扫描检测时,通常在光滑表面上进行扫描轨迹规划,轨迹必须覆盖整个构件且路径连续,不重复不干涉。由于超声传播具有很强的指向性,为保证检测结果的准确性,在进行超声自动检测过程中,扫描头的位置必须时刻与零件表面的法线方向保持较好的一致性。另外,扫描方向也会影响扫描检测的质量,如果扫描方向上曲率变化大,探头频繁摆动,探头接收的信号会有所损失,影响检测质量。为了保证检测质量,设定扫描方向为沿着曲率变化小的方向,使扫描头摆动幅度小,扫描过程平滑。另外,还要保证被检测件的全覆盖检测,包括孔(槽)的底部和孔(槽)壁,这就要求扫描线在遇到孔(槽)时不回避,要从孔(槽)的上方经过,以保证超声波覆盖了孔的内部,确保孔内部缺陷不被遗漏。此外,为了保证对复材构件扫描的全覆盖,扫描轨迹一般为连续的“弓”字形往返轨迹,且边界需要向外延伸一段距离,轨迹线的间距要满足经济性和覆盖性的要求,典型复材构件上的扫描轨迹如图2所示。
另外,有时受复材构件结构的限制,或者要满足用户对某局部区域进行重点扫描检测的要求,还需要提供对构件的局部进行扫描检测规划的功能。
此外,由于扫描轨迹的坐标点信息是基于工件坐标系描述的,因此,必须将坐标点信息转换到设备坐标系下检测设备才能正确运行。设备通过标定定位点获取工件坐标系信息并转换坐标系。最后,将工件坐标系下轨迹信息和定位点信息保存进APT格式文件,驱动超声C扫描设备进行扫描检测。
2 复材构件超声C扫描轨迹规划系统设计
轨迹规划软件系统应该能满足上述所有需求,且集成化程度高,操作简单,与检测工艺过程紧密结合。该系统应能够与航空企业普遍采用的CATIA系统紧密集成,实现由复材构件的三维模型直接驱动,自动进行轨迹规划生成满足条件的轨迹,并导出可由检测设备直接识读的APT文件。此外,系统应能对不同规格系列的复材构件进行检测参数模板化封装,以简化操作,提高扫描轨迹规划的自动化程度。
2.1 系统功能设计
基于上述设计思想,复材构件超声C扫描轨迹规划系统的功能模型如图3所示。
1)建立工件坐标系。工件坐标系是轨迹规划的基础。通过调整工件坐标系的各轴方向和坐标原点位置,可以改变轨迹的扫描方法和起始位置。系统针对复材构件多含有曲面的特点,给出两种建立坐标系的方法:一点两线法和三点法。由于曲面上往往没有直线,因此三点法更适用于曲面工件坐标系的建立。具体方法是在工件上任取三个不重合的点,将其中一点作为原点,原点指向第二点的方向作为一个轴的方向,三点确定的平面的法向量作为第二轴的方向,两个轴向量相乘得到第三轴。此外,为了提高工件坐标系设定的柔性,还需提供坐标系平移功能。
2)建立定位点。定位点是实现检测设备坐标系与工件坐标系两个空间直角坐标系转换的关键。要实现两个空间坐标系间的转换至少需要3个定位点。检测设备通过这3个定位点坐标值的测量值和给定值来构建方程求出坐标转换矩阵,进而实现坐标系的转换。根据检测工艺对定位点在位置上的要求,系统将要求转化为参数。用户在选定定位点的约束元素并输入参数后,系统可自动快速生成定位点。
3)自动轨迹规划与APT格式文件输出。扫描轨迹规划是系统的核心功能。工件坐标系指定了轨迹的扫描方向、步进方向和扫描起始位置。用户选取所有要检测的曲面并给出步进方向的最大值来指定扫描范围,通过设定轨迹线间距的大小来控制扫描的精细度,根据扫描头直径的大小和待测件边缘的情况设定轨迹的向外延伸数值,以保证待测件边缘检测质量。系统根据设定的参数自动规划出扫描轨迹。扫描轨迹规划完毕,可以一键导出轨迹信息和定位点信息到APT文件中,驱动超声C扫描设备进行检测。
4)参数模板建立与维护。在进行复材构件的无损检测过程中,需要根据不同的需求设定不同的参数,而对于结构和外形相同或相似的构件,其检测参数通常是相同的。为了提高检测效率,避免人为误操作,将这些包含建立工件坐标、轨迹规划和定位点要求等的参数封装成参数模板,供操作人员直接调用。参数模板建立与维护提供了新建参数模板、修改参数模板和删除参数模板等功能。
2.2 系统业务过程设计
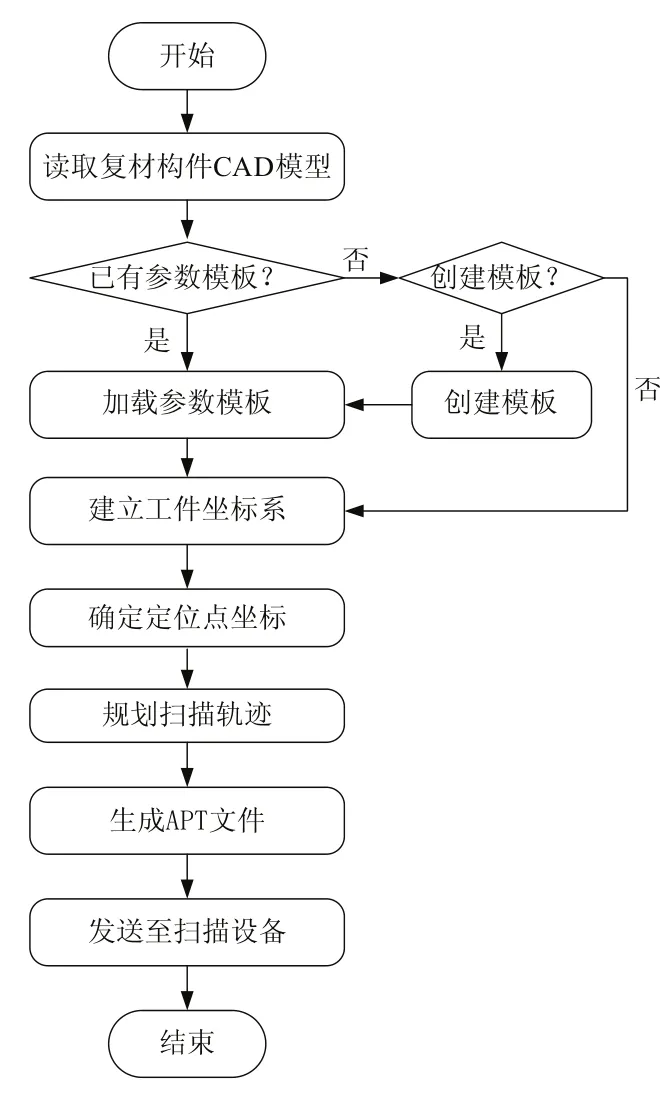
图4 系统业务过程模型
检测工艺人员在接到生产部门发来的检测任务后,将任务附带的被检测复材构件三维CAD模型导入到CATIA系统中,并进入到超声C扫描路径规划模块中进行模型解析和路径规划的操作。具体业务过程如图4所示。用户在导入CAD模型进入系统以后,判断当前检验任务的参数是否已有模板,若有,则加载模板;若无,则考虑当前检验任务参数是否具有代表性,是否需要创建模板。若需要,则先根据检验任务的要求创建参数模板,并加载模板。若不需要,则直接建立工件坐标系。建立工件坐标系需考虑扫描方向和步进方向,以及扫描的起始点。工件坐标系对后续规划出的轨迹具有决定作用。工件坐标系建立完成后可以建立定位点也可以规划扫描轨迹,二者互不影响。在轨迹规划之后观察轨迹是否满足要求,若不满足,根据缺陷情况改变参数或者重建工件坐标系,直到生成满足条件的轨迹。最后,导出包含轨迹信息和定位点信息的APT文件,将APT文件发送到检测现场驱动检测设备运行。
3 系统实现关键技术
在系统的设计与开发过程中,由于复材构件多是由不规整的曲面组合而成的自由曲面,因此,在组合曲面上按照用户的要求快速自动地确定定位点和进行轨迹规划是关键。
3.1 基于快速误差逼近思想的定位点自动建立
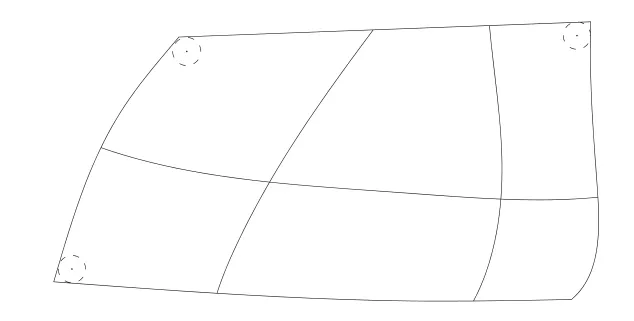
图5 定位点位置示意图
定位点的选择应充分考虑检测人员在现场操作的便利性和准确性。三个定位点连成的范围应该能够最大的反映构件长宽方向的跨度,以提高定位的准确度。因此,工艺人员一般将定位点的位置选在构件的左下、左上和右上三个转角处,同时,为了方便现场检测人员的寻找,一般将定位点设定为与边角两条边的垂直距离都为检测探头喷出的圆形水柱半径R的点,即如图5中虚线圆圆心所示的位置。检测人员在定位时,将检测探头移动到边角处,调整检测水柱与两条边线相切且水柱与曲面垂直,此时水柱的中心点位置就是定位点的位置。

图6 定位点生成算法过程示意图
为了快速且自动的生成上述要求的定位点,本文提出了基于快速误差逼近思想的定位点建立算法。该算法的基本原理是:根据当前点距离边线的距离与给定距离差值的大小,动态改变遍历的范围、步距和误差值,并用递归的方法逐步缩小范围直到找到定位点。算法过程可用图6来表示,首先任选曲面上一点point0作为起始点,根据point0与两条边线的距离值给出以point0为中心的遍历范围,及相应的步距和误差。执行遍历后找到满足误差要求的点point1,如果当前误差大于给定误差,则进入下一层递归,执行以上相同的步骤,直到某次递归中误差值小于给定误差,则该次递归中找到的点point即为要找的定位点。
3.2 基于截平面法的组合曲面扫描轨迹规划
对复材构件进行超声C扫描检测路径规划的关键在于在组合曲面上生成连续的扫描轨迹。由需求分析可知,工件坐标系的x轴方向为扫描轨迹的扫描方向,即所有轨迹线在工件坐标系xoz平面上的投影平行于x轴。针对轨迹的这一特点,本文提出了基于截平面法生成扫描轨迹的算法。算法的基本思路是:用一系列平行于工件坐标系xoy平面的平面去截取复材构件模型的表面,得到一系列截面线,再将这些截面线进行排序、去冗余和连接等处理来得到轨迹。
截平面法生成轨迹要注意裁剪曲面的问题。由于复材构件模型上的组合曲面中往往含有裁剪曲面,裁剪曲面是用原曲面的几何信息加上裁剪信息表示的,并没有自己的参数表示,裁剪曲面的几何包围盒还是原曲面的包围盒。所以要对每个曲面的边界进行解析,避免轨迹超出裁剪曲面的实际边界,造成轨迹误差。
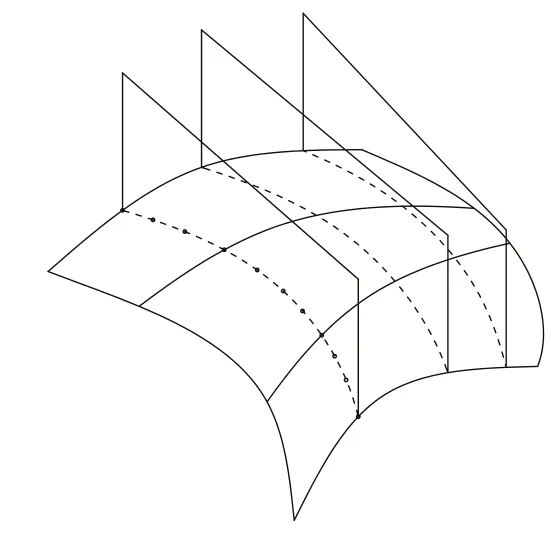
图7 组合曲面截平面法生成扫描轨迹示意图
如图7所示,将截平面与组合曲面的相交分解成截平面与每个曲面块的相交,进而得到各个曲线段。为处理裁剪曲面几何包围盒可能大于实际范围的问题,需解析出曲面块的所有边线,用这些边线截取曲线段,将面外部分裁剪掉,去除冗余。获取所有曲线段后,依据扫描精度要求,按照最大弦高误差原则和最大步长原则将各曲线段离散成点。对于五轴扫描设备而言,运行轨迹不仅要包含点的位置信息x,y,z,还要包含点所在曲面位置的法矢信息i,j,k。用结构体将点的完整信息保存起来。最后将所有离散点按照顺序排列后拟合成扫描轨迹线。
4 系统的实现与应用
基于前述的需求分析与系统设计,面向复材构件超声C扫描检测轨迹规划系统采用CATIA-CAA二次开发技术设计开发。系统功能与CATIA系统实现了无缝集成,所有功能都集成在CATIA系统的一个工具条上,用户通过点击相应按钮即可实现坐标系建立、定位点创建、扫描区域选择、扫描轨迹参数设置、扫描轨迹规划和APT文件的输出等功能。系统运行界面如图8和图9所示。
该系统已应用于哈尔滨飞机工业集团公司,解决了复材构件超声C扫描无损检测轨迹规划的自动化问题,大大提高了复材构件检测规划的效率。一般复杂程度的复材构件扫描轨迹规划时间由原来平均每件50分钟,缩短到现在每件平均5分钟。
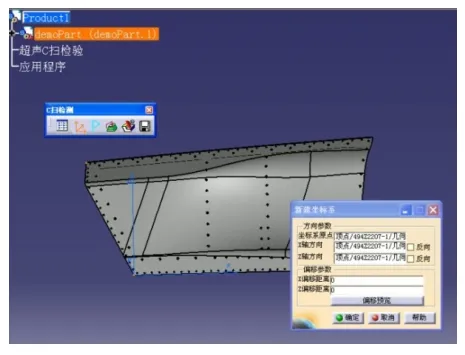
图8 建立工件坐标系
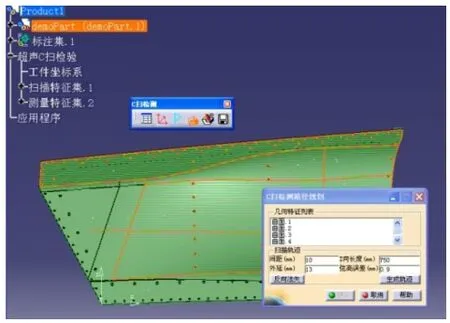
图9 超声C扫描检测轨迹规划结果
5 结束语
本文对飞机复材构件超声C扫描检测轨迹自动规划问题展开研究,分析了复材构件的特点和对超声C扫描轨迹规划系统的设计需求,构建了三维模型驱动的扫描轨迹规划系统的功能模型和业务过程模型,提出了基于变步长快速误差逼近思想的定位点建立算法和基于截平面法的组合曲面扫描轨迹规划算法,并基于CATIACAA二次开发技术设计开发了与CAITA系统无缝集成的复材构件超声C扫描轨迹规划系统。工程实际应用表明,该系统能有效提高复材构件超声C扫描轨迹规划的效率,降低对操作人员的技术要求。为打通复材构件数字化设计、制造、检测数据链路提供了可供借鉴的方法和软件工具支持。
[1] 张保平,王运生.RTM技术在大飞机复合材料构件上的应用[J].航空制造技术,2007(12),68-70.
[2] 王艳颖,吴瑞明,周晓军,等.大型非对称复合材料构件超声C扫描技术研究[J].浙江大学学报:工学版,2004,83(9):1208-1211.
[3] 王晓宁.USL超声C扫描喷水检测系统在哈飞复合材料检测中的应用[J].航空制造技术,2008:(15),58-60.
[4] 吴思源,周晓军,杨辰龙,等.曲面工件超声检测路径检测规划方法研究[J].传感技术学报, 2006,19(2):388-392.
[5] 吴思源,周晓军,江健,等.超声检测中曲面重构和路径规划方法研究[J].浙江大学学报,2006,40(5):763-767.
[6] 李天宁.复杂构件超声检测系统扫描路径规划及扫描时间优化研究[D].中北大学,2012.6.
猜你喜欢
电气化铁道(2023年6期)2024-01-08 07:45:48
保健医苑(2021年9期)2021-09-08 14:38:06
数学年刊A辑(中文版)(2019年1期)2019-01-31 02:35:28
数学物理学报(2018年5期)2018-11-16 05:49:44
电气化铁道(2018年4期)2018-09-11 07:01:38
纤维复合材料(2018年4期)2018-04-28 08:46:04
纤维复合材料(2018年4期)2018-04-28 08:45:52
纤维复合材料(2018年4期)2018-04-28 08:45:46
纤维复合材料(2018年3期)2018-04-25 07:22:42
金色少年(奇趣科普)(2017年4期)2017-06-05 15:03:46
