
基于ABAQUS的煤矿应急无线通信中继器设计
2015-10-30 07:21:04马宏伟薛旭升尚万峰
制造业自动化 2015年10期
马宏伟,薛旭升,尚万峰
(西安科技大学 机械工程学院,西安 710054)
0 引言
煤矿井下通信可称为“井下神经”,是承载井下各类重要数据信息的传输通道。井下环境复杂,尤其是在发生一氧化碳或其他气体爆炸、塌方等灾难后,井下地理环境发生未知变化,井下通信系统遭到严重破坏,为煤矿救援机器人进入井下实施救援工作带来严重影响。保证通信设备在复杂环境中稳定运行,研发安全、可靠的无线通信设备,是实现将井下救援机器人监控系统采集的环境信息传输出来[1,2],以及快速搭建无线通信系统,解决救援指挥中心与救援探测机器人、机器人与机器人等之间实时通信的重要硬件基础之一。可见,适合复杂环境的通信设备成为井下应急无线通信网络覆盖的桥梁,是救援机器人开展危险环境下有效救援工作的重要保证。
针对煤矿救援机器人在井下施救过程中,由于地理环境的变化导致通信系统受到很大局限,使机器人采集的数据受到传输威胁,搭建无线通信网络就是一种很好的解决方法之一[3]。本文对组建通信系统的无线设备结构进行研究,提出适应事故井下复杂地理条件及环境的不倒翁型无线中继器。借助理论力学分析和有限元方法对该结构在井下环境中的运动进行分析,了解不倒翁型中继器在井下的适应能力,并提供优化结构的方法,为井下煤矿救援机器人在井下实施救援工作时的无线通信网络搭建提供可靠通信设备,是快速救援与机器人安全运行的重要保证。
1 应急通信无线中继器设计
无线通信设备完成多个设备之间的各种数据传输,实时接入网络设备进入通信网络,扩大网络覆盖[4]。灾难环境下巷道地形发生未知变化,中继器摆放条件不理想,严重影响到中继摆放位置姿态,导致建立应急通信网络的中继器通信能力不足,影响到救援工作的效率。针对此类问题,本文研究了一种适应井下复杂环境,保证井下通信终端在未知环境中远距离通信的正常工作,为快速、有效地开展灾难井下救援工作提供重要通信网络支持。如图1所示,为“不倒翁”型无线中继器结构示意图。该“不倒翁”型无线通信中继器本体结构是由重心调解仓、无线通信模块放置仓、不倒翁颈部、天线夹持头及天线五个部分组成。
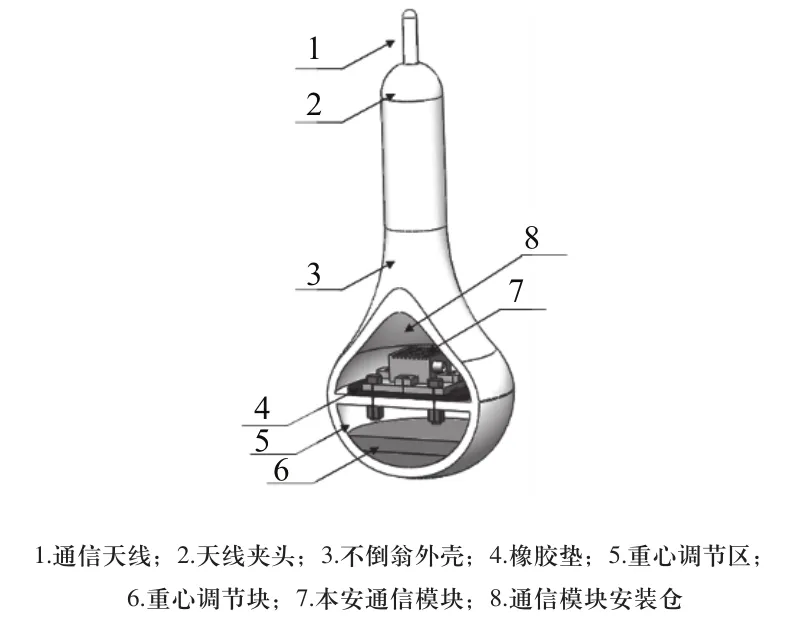
图1 “不倒翁”型无线通信中继平台结构
其各部分主要功能结构为:
1)重心调解仓,由不倒翁球形外壳和重心调解块组成,完成布放下落出仓过程以及受到外力发生重心偏移后恢复姿态,实现通信天线始终能够保持最佳姿态。
2)无线通信模块放置仓,由Wi-Fi通信模块、供电电池、本安壳、减震片及安装板组成,完成安全安装通信模块,并用上球体过渡颈部上盖连接不倒翁下球体,将无线通信模块安装在放置仓内,并与外部环境尽可能隔离,以保证安全运行。
3)不倒翁颈部,为空心圆柱杆,下连接无线通信模块放置仓外壳体,上连接天线夹持头。杆身长度由井下有效通信信号距离地面的高度决定,以保证在距离地面合适高度的情况下,能够正常通信。同时,将经过颈部的天线延长线,从无线通信模块处连接至天线夹持头上处天线。
4)天线夹持头,为带孔半球形,下连接不倒翁颈部,并将天线夹持在夹持头上。
5)天线,由无线通信模块及井下通信参数要求,设计通信天线的尺寸及类型,保证在煤矿井下的复杂环境中,正常接受与发送通信数据。
2 “不倒翁”型无线通信中继器力学分析
“不倒翁”型无线通信中继器需要完成在布放、外力冲击等过程中,在未知地形环境的情况下,恢复最佳通信工作姿态的任务。因此,需要对不倒翁在井下的受力过程进行分析,为设计不倒翁在井下环境适应性的能力提供重要理论依据。
2.1 不倒翁基本受力情况
不倒翁稳定平衡点CG在整个机构中是变化最为慢的位置。不倒翁顺时针或倾斜逆时针摆动时,CG点离开垂直平衡位置,通过新的支撑点,使得CG点垂直距离回复过来。重力返回到其稳定的位置[5]。如图2所示。
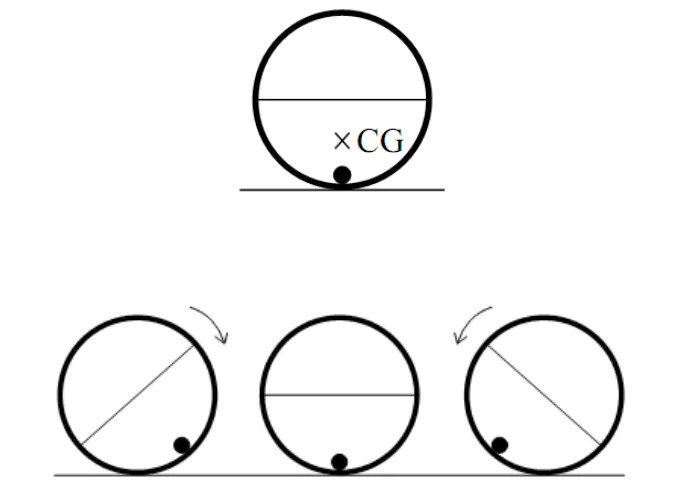
图2 不倒翁的平衡
根据不倒翁原理,不倒翁的位置姿态分为三种,如下:
1)不倒翁平衡状态
此状态下,不倒翁受到两个力:重力和支持力。
2)不倒翁倾斜状态
此状态下,不倒翁倾斜时受到两个力矩:外力形成干扰力矩和重力形成的抵抗力矩。
3)不倒翁复原状态
此状态下,从势能角度考虑,势能低的物体比较稳定,物体一定会向着势能低的状态变化。
在以上的整个过程中,建立新的平衡是其中主要的问题,因为只有如此才能抵制外力的干扰,而恢复原有的平衡则是次要问题,因为此时外力的干扰已经去除。在整个过程中不倒翁始终保持平衡的属性,这便是“平衡的稳定性”。
2.2 中继器在井下倾斜地形中的受力情况
当中继器被布置在有坡度的地形中时,存在2种运动状态,包括:不下滑,原地倾斜状态,以及下滑后倾斜状态。第一种情况相比在平面时的倾斜状态,多了接触面的坡度α。第二种情况中继向下滑动,则在中继静止前无需考虑其姿态变化,直至中继滑动到静止位置时,对中继进行倾斜位置受力分析。如图3所示,为“不倒翁”型中继器在坡度地形上的倾斜受力分析。
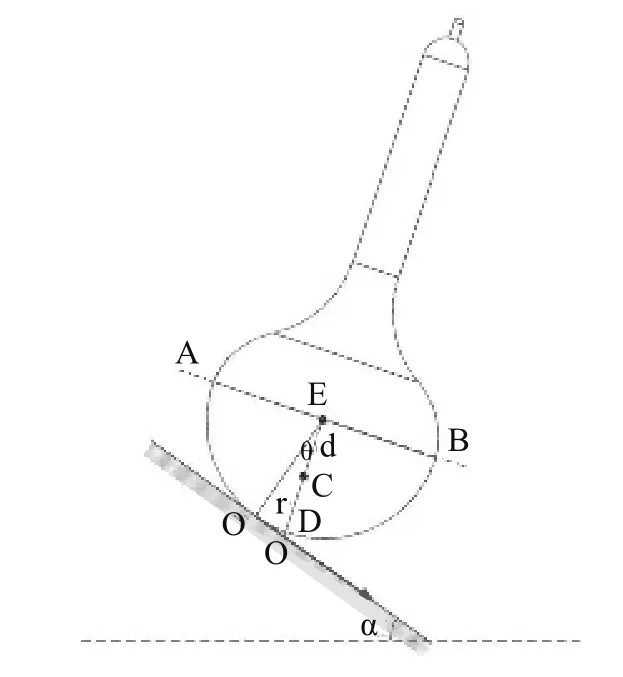
图3 “不倒翁”中继器在坡度地形上的倾斜受力分析图
当中继下落静止或滑动至静止位置时,倾斜状态的受力分析为:

2.3 中继器复原位置受力情况
对于上重下轻的物体来说,重心越低越稳定。而从势能角度考虑,势能低的物体比较稳定,物体一定会向着势能低的状态变化。然而,从力矩平衡角度来讲,“不倒翁”型中继器倾斜摆动时,重心被抬高,产生力矩,该力矩是用来克服外力所造成的倾斜摆动,使中继器恢复到平衡状态[6]。如图2所示,为“不倒翁”型中继器在布放过程或受外力情况下恢复姿态位置的受力分析图。
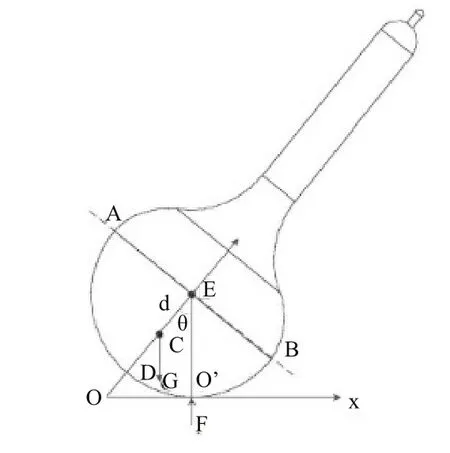
图4 “不倒翁”型中继器恢复姿态位置的受力分析图
图4中,重心为C点,E被称为稳心点,当下落或受外力时,出现O转至O’,产生了力偶距,在重力的存在下,同时产生恢复力矩M,即:

式中,G为重力;d为重心到稳心距离,即稳心高度;θ为重心偏移角度。该式为外力影响下产生的恢复力矩,并在该力矩的作用下,“不倒翁”型中继器逐渐恢复到平衡位置。
2.4 中继器在井下地理环境下的受力情况
一般情况下,不倒翁在较平整地形,例如,坚实平地、沙地、煤块堆积较密集的地形中受力情况正如上述分析。但在煤块或其他大块障碍物散落地形,即地面松散,间隙较大的情况下,“不倒翁”型中继器在大缝隙地面的受力情况会因受到多接触点的影响,使中继器恢复姿态的能力受到一定的影响。
这里以两支点为例,如图5所示,在大缝隙地面上,“不倒翁”型中继器出现的几种情况,从产生力矩的角度简单分析,对该地形环境中的倾斜情况。
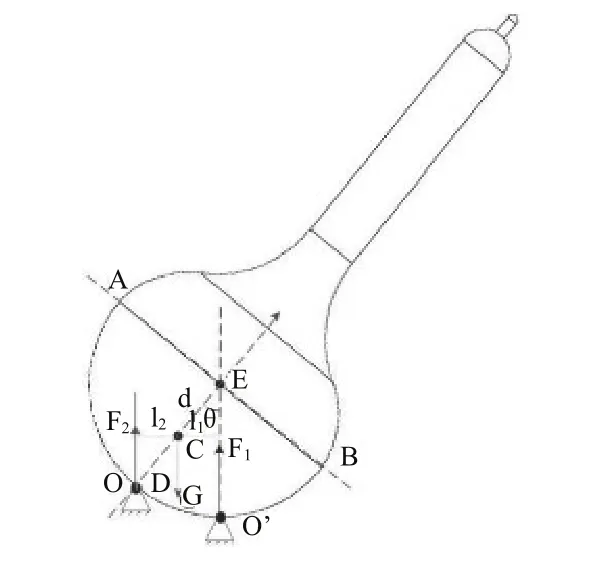
图5 大缝隙地面上不倒翁受力分析图
当地面存在碎石等不平整的情况下,由于石缝距离过大,使得“不倒翁”型中继器在布放或者受冲击后,落在石缝之间。此时,在打破不倒翁平衡的同时,产生了力偶距,由于出现了两个支撑点O和O’,且O、O’点在重心C点两侧时,不倒翁在倾斜情况下,由重力G产生的恢复力矩M为:
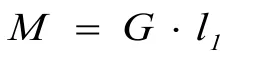
但是,重力在产生恢复力矩,使不倒翁具有恢复状态的同时,由于O点支撑造成外力干扰力矩M2为:
其中,sinrl2⋅=θ,r为重心到下半球底的距离。
此时,若θ<90°时,恢复力矩M>M2,并且由于不倒翁下部为半球形表面,在重力作用下沿切线滑动,逐渐进入平衡位置。
若θ>90°时,将被卡死,不会进行恢复状态的运动。
当不倒翁所在地面石缝间隙的两个支点都出现在重心C点的右侧时,理想情况下,可将两点简化为一点支撑的情况,此时的受力与“不倒翁”型中继器在地面较好的环境中的受力情况类似。
3 有限元模型的建立及结果分析
“不倒翁”型中继器在井下环境完成搭建通信网络过程中的受力情况,需要先借助有限元仿真软件ABAQUS多体系统建立进行“不倒翁”型中继的几何模型,并在建立材料模型时,初步确定在井下灾难环境中适应各种突变和危险环境的材料,分析“不倒翁”型中继器在不同地形、布放下落、受到外力冲击等环境下的动力学情况,为保证后期设计实体中继器时提供可靠设计依据,以及验证方法。适应井下灾难环境,需要以耐高温、耐火、隔潮防水、耐冲击等方面为前提,选择较轻的耐火性、耐冲击较高的聚碳酸酯(工程塑料),便于减小不倒翁头部、颈部重量。同时,选择铅块为不倒翁调整重心的重力块。聚碳酸酯和铅块的材料属性[7],如表1所示。

表1 材料属性及单元类型
不倒翁在地面上运动过程中,可以假设不倒翁与地面的接触为多体接触类型,对多体系统的仿真环境进行设置,为观察“不倒翁”型无线通信中继器与煤矿井下地面的瞬态接触,设置连接单元、连接单元关系及连接单元属性,并在接触设置中,设置接触方式及接触属性,完成多体连接关系设置,并划分不倒翁与地面的有限元网格[8~10]。本研究旨在设计“不倒翁”型中继器原型,应用
ABAQUS有限元软件对其进行动力学研究,提出正确仿真计算方法,为研制“不倒翁”型中继器实体提供可靠且重要依据。本文将在加载1000N、2000N、3000N三种集中力的情况下,对“不倒翁”型中继器在煤矿井下布放或者外力冲击下运动恢复平衡过程的仿真。
3.1 速度仿真分析
图6 半周期往复过程中相对速度矢量及变化曲线图
图6为在三种载荷力下,速度在相对位移方向上的速度变化,曲线最低点左端为不倒翁从最右端恢复姿态过程,当到达最低点时恢复姿态,又在其惯性力作用下向左端摆动,由于摩擦力及恢复力的存在,速度无法达到最右端的大小,依次在恢复过程中,速度不断减小,最终达到平衡状态。
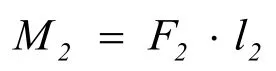
3.2 加速度仿真分析
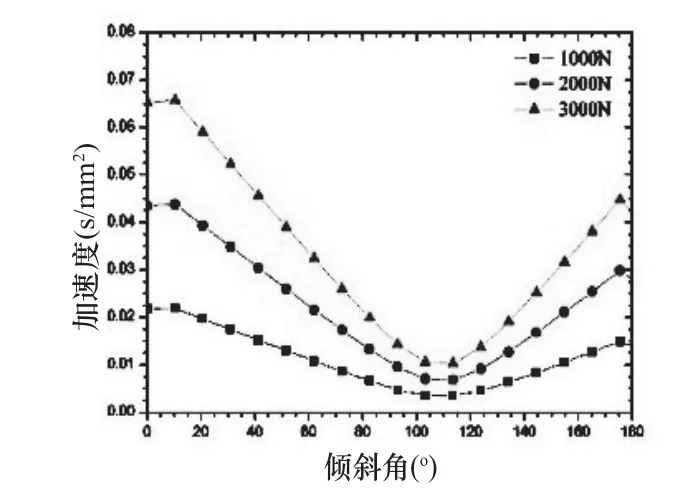
图7 半周期往复过程中相对速度矢量及变化曲线图
图7为在三种载荷力下,加速度在相对位移方向上的加速度变化,曲线最低点左端为不倒翁从最右端恢复姿态过程,当到达最低点时恢复姿态,又在其惯性力作用下向左端摆动,由于摩擦力及恢复力的存在,加速度无法达到最右端时的大小,逐渐在恢复过程中,加速度不断减小,最终达到平衡状态。同时,加速度反映速度随时间的变化关系,当加速度由于外界力的变化使得速度随时间越来越小,最终恢复到平衡状态。
三种不同外界载荷的冲击下,倾斜在同一角度时的速度不同,外力越大,速度越大;当通过最小速度,进入恢复姿态运动时,速度衰减最快是外界载荷最大的,但是最先停止的可以预测为受外界载荷最小的。可见,外界载荷是影响不倒翁恢复的重要因素之一。
4 结论
通过研究事故井下复杂环境中的潜在危险,为降低井下通信设备安全威胁,研发可靠的无线通信设备,是实现快速搭建煤矿救援探测机器人无线通信系统,解决救援指挥中心与救援探测机器人、机器人与机器人等之间实时通信的重要硬件基础之一。本文通过对“不倒翁”应用特点及事故井下中继器适应性的分析,设计出“不倒翁”型中继器的具体结构、装配关系及在井下的工作关系;通过对“不倒翁”型无线中继器在三种状态及不同环境下受力情况的动力学分析,从理论角度上得出“不倒翁”型无线中继器在事故井下的可行性、安全性和可靠性等特点;应用有限元仿真软件ABAQUS建立“不倒翁”型无线中继器的有限元几何模型、材料模型、力学模型等,得出“不倒翁”型无线中继器的运动学分析结果,为研制实体提供重要计算手段和验证方法。
[1] 马宏伟,王川伟.煤矿救援探测机器人转向及避障机理研究[J].制造业自动化.2014(04).
[2] MS. Chakkath, S. Hariharansiddharath, B. Hemalatha. Mobile Robot in Coal Mine Disaster Surveillance [J]. IOSR Journal of Engineering,2012,Vol.2(10):77-82.
[3] S. TejaRam,Smt. M. Nalinisri.Mobile Robot in Coal Mine Disaster[J].International Journal of Computer Trends and Technology (IJCTT),2013,Vol.4(5):1106-1110.
[4] Hideaki O., Hagi (JP); Hideaki T., Kawasakii (JP).Communication Device Simultaneously Using Plurality of Routes Corresponding to Application Characteristics[P].US 2006/0039335 A1,2006.
[5] Andre K.T.. Archimedes, the Center of Gravity, and the First Law of Mechanics (2nd edition)[M].Library and Archives Canada Cataloguing, 2010,:112-113
[6] 曹春梅,张晓宏.不倒翁的力学分析[J].物理与工程,2002,12(1):10-11.
[7] 王忠保,等.机械工程材料性能数据手册[M].北京:机械工程出版社,1995.
[8] 赵腾伦.ABAQUS6.6在机械工程中的应用[M].北京:水利水电出版社,2007.
[9] 庄茁. 基于ABAQUS的有限元分析和应用[M].北京:清华大学出版社,1998.
[10] 王玉镯.ABAQUS结构工程分析及实例详解[M].北京:中国建筑工业出版社,2010.
猜你喜欢
党风与廉政(2023年8期)2023-04-29 14:25:25
作文周刊·小学一年级版(2021年48期)2021-01-04 17:53:31
南京大学学报(数学半年刊)(2020年1期)2020-03-19 02:24:42
文理导航·科普童话(2016年4期)2016-05-31 23:28:30
科普童话·百科探秘(2015年7期)2015-07-25 07:23:01
小雪花·成长指南(2015年5期)2015-05-25 17:23:39
压缩机技术(2014年5期)2014-02-28 21:28:16
河南科技(2014年11期)2014-02-27 14:17:04
杭州电子科技大学学报(自然科学版)(2013年2期)2013-12-02 14:12:30
杭州电子科技大学学报(自然科学版)(2013年2期)2013-12-02 14:12:14
