
复杂曲面上机器人自动喷涂路径规划方法
2015-10-29 05:47:54王金涛徐金亭
中国机械工程 2015年14期
王金涛 徐金亭
1.新松机器人自动化股份有限公司,沈阳,110168 2.大连理工大学,大连,116024
复杂曲面上机器人自动喷涂路径规划方法
王金涛1徐金亭2
1.新松机器人自动化股份有限公司,沈阳,1101682.大连理工大学,大连,116024
针对目前含有岛屿或空洞的复杂曲面上机器人喷涂路径规划中存在的问题,提出一种能够保持轮廓平行的机器人喷涂路径设计方法。利用最小二乘坐标映射原理,将被喷涂曲面映射到二维平面域,建立目标曲面与二维平面域之间的一一映射关系,然后对平面映射域的内外边界进行连续偏置,构造能够保持轮廓平行的二维偏置曲线;进而以被喷涂曲面到二维平面域的坐标映射为向导,将无干涉二维偏置曲线逆映射到被喷涂曲面上,生成能够保持轮廓平行的喷涂路径,实现多岛屿或空洞复杂曲面上三维喷绘路径设计到二维平面的降维处理。实例仿真实验结果表明,所提方法简单实用,可在含有岛屿或空洞的复杂曲面上快速地生成能够保持轮廓平行的机器人喷涂路径。
复杂曲面;机器人喷涂;路径规划
0 引言
机器人自动喷涂在汽车、航空航天、模具等制造领域中具有广泛的潜在应用,特别适用于危险或恶劣工况下复杂零件表面的化学、物理和热处理过程。由于机器人的喷涂过程是由喷涂路径直接驱动的,因此生成高效的喷绘路径就成为实现复杂曲面自动喷涂的关键。理论上,机器人喷涂路径与数控加工中刀具的运动轨迹类似,在设计过程中可直接使用数控加工中的刀具路径。目前,数控加工路径设计主要是基于参数曲面模型来完成的,许多有效的路径设计方法已经被提出[1-2],但参数曲面特别是组合裁减曲面上干涉检测、偏置处理等路径相关几何计算的复杂性和数值问题以及不同造型系统的参数曲面模型在相互格式转化中经常出现的模型破损、数据丢失现象却严重限制了这些方法的实现运行和在制造企业中的实际应用。正如Kiswanto等[3]所说,在设计阶段广泛采用的参数曲面并非是过程规划阶段模型的理想选择。与参数曲面相比,网格曲面是对原始曲面的线型逼近,其模型表示统一、数据交换简单,而且网格上的几何计算更加快速稳定,因此将网格曲面作为复杂曲面加工和喷绘阶段的描述模型就成为越过测量数据到参数曲面这一繁琐构造过程的有效手段[4-6]。目前,网格曲面上路径规划的研究主要集中在截面线型路径的设计[7-10]。截面线型轨迹计算简单,鲁棒性强,但受限于曲面几何形状,当截平面的方向矢量接近曲面局部法矢量时,截平面就很难与网格曲面相交生成喷涂或加工路径,而且,随着曲面边界复杂程度或扭曲的加剧,截面线型路径将很难与曲面边界保持一致,有时甚至造成大量较短的喷涂路径出现,这势必降低喷涂的效果和效率。
为了解决上述问题,一些新的网格曲面上的加工路径设计方法被相继提出,如Kim等[11]、Lee等[12]利用刀位面变形或走刀行距驱动的系列截面,在原始网格偏置曲面即刀位面上构造出能增大走刀行距的等残留刀具路径。Sun等[13]将图形学中的调和映射方法引入网格曲面加工中,生成能够连续进给的螺旋路径。类似地,利用图形学中的ABF(angle-based flattening)参数化方法,Li等[14]将网格曲面展平到平面域,构造出能够保持边界一致的轮廓平行路径。但应该注意的是,上述方法仍只适用于无空洞或无岛屿的简单网格曲面加工,对于多岛屿复杂网格曲面的加工或喷涂,目前仍采用截面线型路径。为了解决这一问题,本文在上述工作的基础上,围绕多岛屿复杂网格曲面加工展开论述,引入适用范围更广的最小二乘坐标映射原理来展平多岛屿复杂网格曲面,进而改进二维曲线偏置算法以快速构造轮廓平行喷涂路径,实现多岛屿或空洞复杂曲面上三维喷绘路径设计到二维平面的降维处理,并通过实例验证所提方法的有效性。
1 最小二乘坐标映射
考虑到文献[13-14]中所采用的调和映射、ABF等网格参数化方法只适用于无岛屿和空洞的简单网格曲面,本文引入适用范围更广的最小二乘坐标映射来展平多岛屿网格曲面,建立目标曲面与平面域之间的映射关系[15]。根据调和映射原理,网格曲面Γ的顶点的局部坐标(x,y)到平面上对应点(u,v)的映射Ω:(x,y)→(u,v)应满足如下最小二乘目标方程:
(1)
其中,AT为网格曲面上三角形T的面积,Ω为复数形式,Ω=iv。最小二乘映射可解释为:给每一网格顶点指定一复数Ω以使上述方程取得最小值。假定映射Ω在三角面片T上线性变化,则式(1)可改写为
(2)
Ω=(Ω1,Ω2,…,Ωn),dT=2AT
式中,j1、j2、j3为三角形T的三个顶点的索引。
对三角形T而言,三个顶点Wj1、Wj2、Wj3可按下式计算:
(3)
根据文献[12],拆分Ω的实部和虚部,可将式(2)改写为如下的实矩阵方程:

(4)
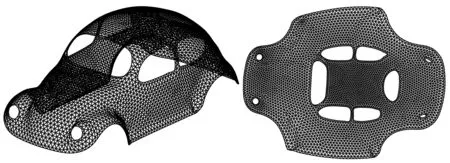
图1 网格曲面展平到平面域上的例子
2 轮廓曲线偏置
利用上述方法得到平面网格后,就可偏置平面网格的边界曲线,进而将偏置曲线逆映射到网格曲面上,生成能够保持轮廓平行的喷绘轨迹。平面曲线偏置的关键在于自交干涉的处理,传统方法大都是利用包围盒划分来加速自交点的计算[16-17],而本文将给出一种基于网格拓扑结构的交点计算方法,省去了传统的包围盒划分过程,从而提高算法的运行效率。
2.1自交点的计算

2.2内外边界曲线的偏置策略
在曲线偏置过程中,展平网格的内外边界被选择为初始偏置曲线。与传统方法对内外边界同时进行偏置再进行融合处理不同,本文采取如下更为简单的偏置策略(图2):岛屿边界只向外偏置一次,然后进行岛屿边界偏置曲线与外边界偏置曲线之间的相交、融合判断,构造新的外边界曲线和内边界曲线。如图2所示,在后续的偏置过程中,只进行外部边界的偏置处理,而不再偏置岛屿的偏置轮廓。这一内外轮廓曲线的偏置策略有效地消除了岛屿连续偏置曲线之间的相交融合判断过程,简化了多岛屿轮廓的偏置处理,更有利于算法的编程实现。图3为利用上述方法得到的甲壳虫车身展平网格上的二维偏置曲线。
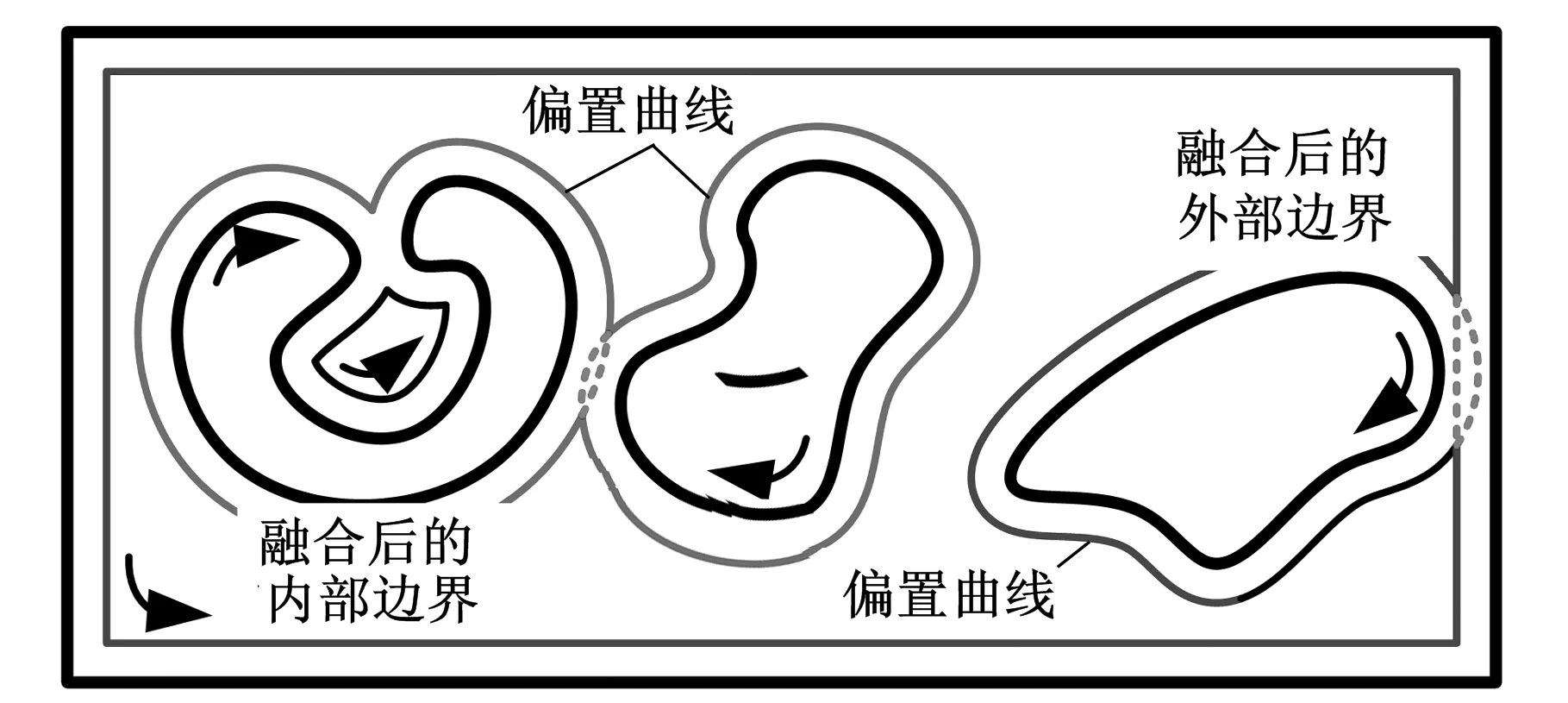
图2 展平网格内外边界的偏置策略
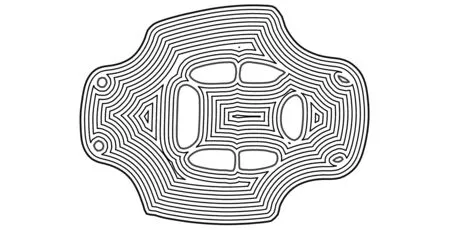
图3 展平网格上的二维偏置曲线
3 机器人喷绘轨迹生成
(5)
(6)
这样,就可将平面偏置曲线映射到网格曲面上,生成喷涂点轨迹。注意,上面得到的喷涂点并不是驱动机器人运动的喷涂位置点。如图4所示,实际的喷涂位置点由下式计算:
pL,i=pi+hni
(7)
式中,h为机器人喷头的高度;ni为喷涂点pi处的法矢量。
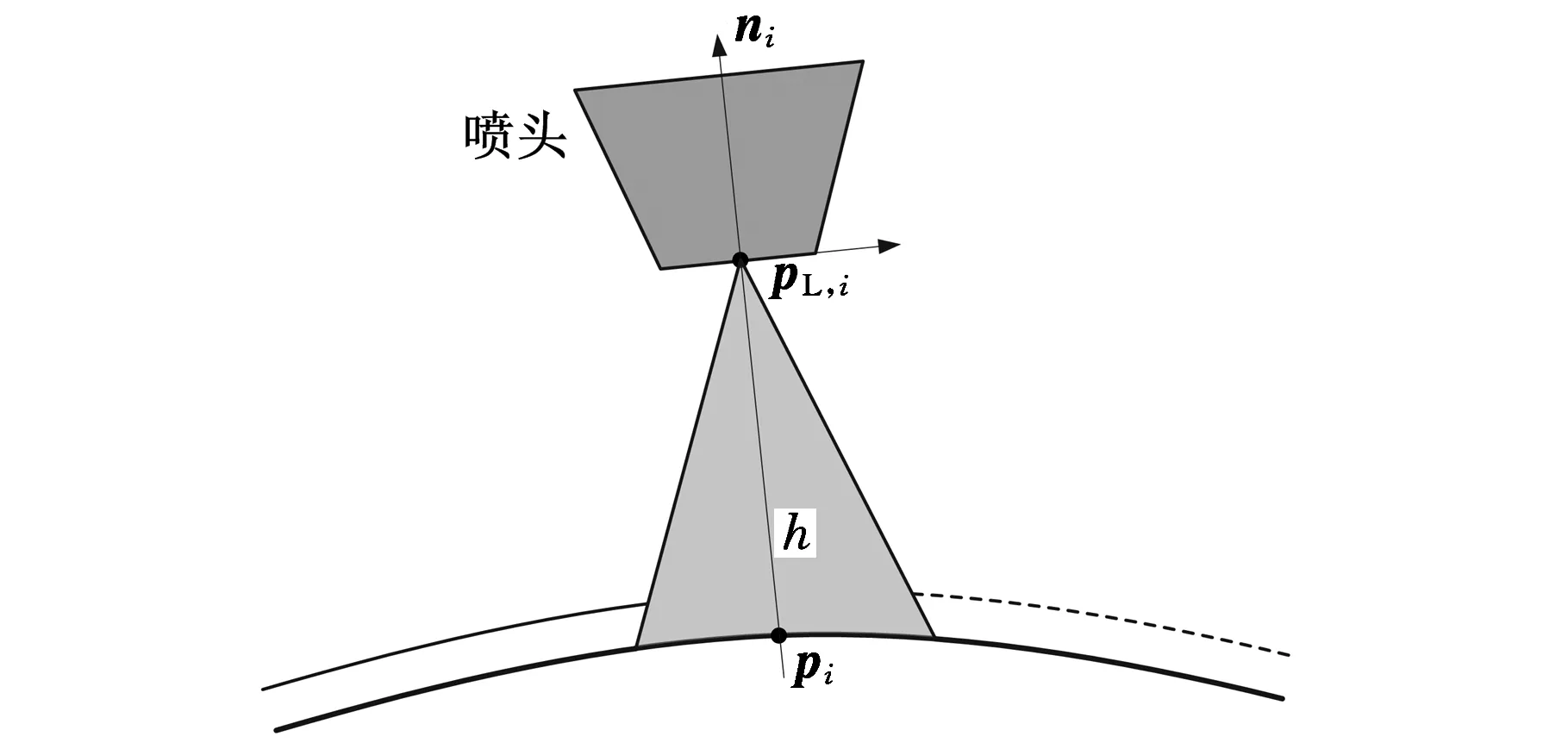
图4 机器人喷头位置点的计算
由此,就可得到机器人喷绘路径。所提喷涂路径设计算法的流程如图5所示。
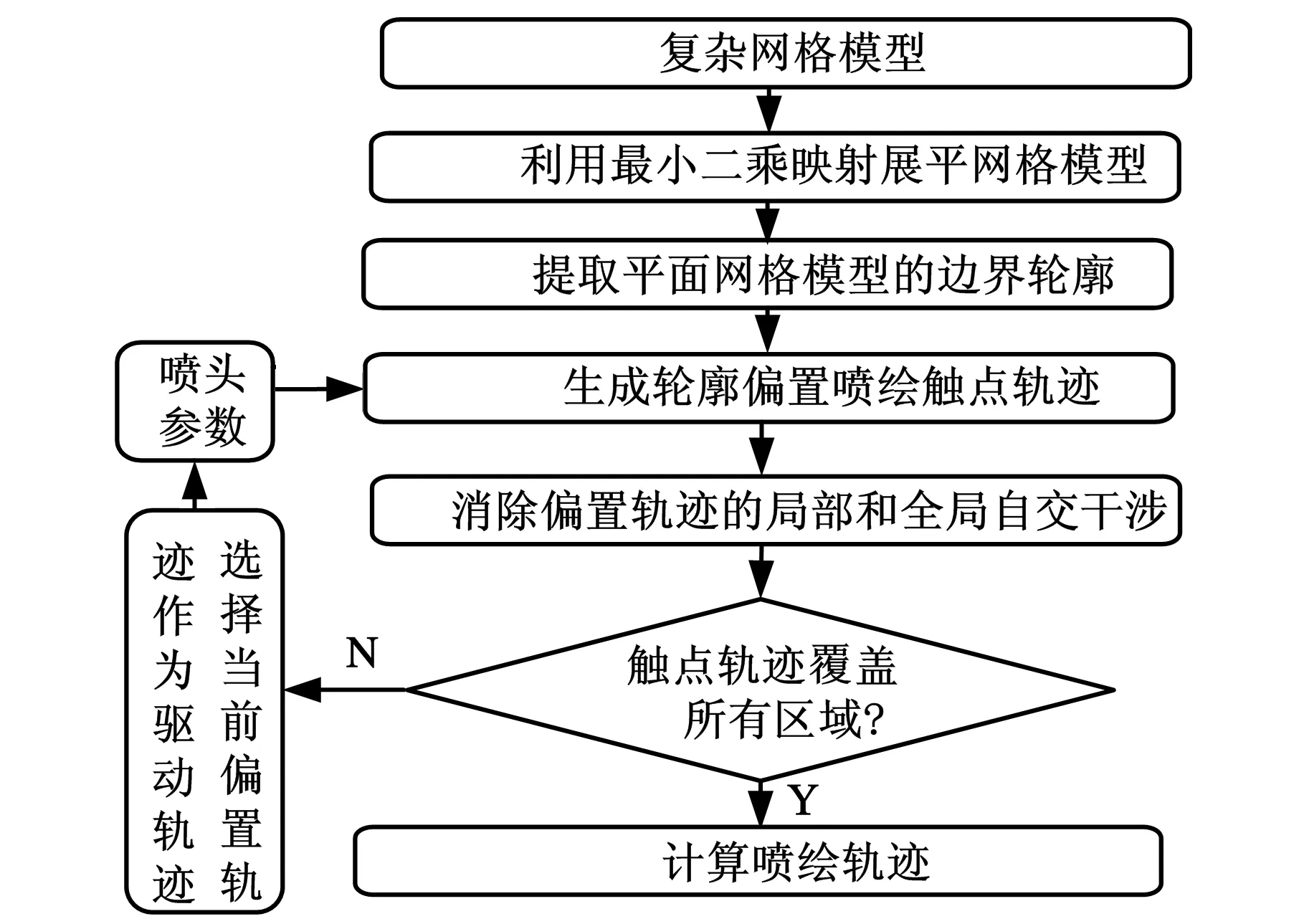
图5 所提喷涂路径设计算法的流程图
4 仿真实验
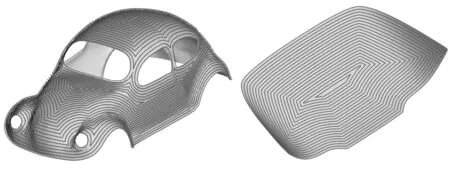
(a)多空洞复杂曲面上的机器人喷涂路径(b)无空洞复杂曲面上的机器人喷涂路径图6 复杂曲面上机器人喷涂路径的仿真算例
以Visual C++2010为工具,上述所有算法已经被编程实现。测试模型在Imageware中构造,并利用Imageware的网格生成器将参数曲面离散成为网格曲面。采用前文所述最小二乘映射方法展平目标曲面,在展平曲面上利用所给出的曲线偏置方法得到二维偏置曲线,进而将其逆映射到待喷绘曲面上,利用式(7)生成喷绘轨迹。图6给出了上述方法在不同曲面上生成机器人喷涂路径的验证算例。仿真结果显示,所提方法可在含有岛屿或空洞的复杂曲面上快速地生成能够保持轮廓平行的机器人喷涂路径。
5 结论
(1)利用最小二乘映射方法展平目标曲面,建立了三维曲面与二维平面之间的对应关系,实现了复杂曲面上机器人三维喷涂路径设计到二维平面的降维处理。
(2)基于网格拓扑的二维曲线偏置算法不需要对所有偏置段间进行两两求交操作,有效地提高了偏置段间自交点的计算效率。
(3)所有的算法已经被编程实现,并在两类不同复杂曲面进行了验证,仿真实验结果表明,所提方法可在复杂曲面上快速地生成能够保持轮廓平行的机器人喷涂路径。
[1]Makhanov S S.Adaptable Geometric Patterns for Five-axis Machining:a Survey.International[J].Journal of Advanced Manufacturing Technology,2010,47(9/12):1167-1208.
[2]Lasemi A,Xue D Y,Gu P H.Recent Development in CNC Machining of Freeform Surfaces:a State-of-the-art Review[J].Computer-Aided Design,2010,42(7):641-654.
[3]Kiswanto G,Lauwers B,Kruth J P.Gouging Elimination through Tool Lifting in Tool Path Generation for Five-axis Milling Based on Faceted Models[J].International Journal of Advanced Manufacturing Technology,2007,32(3/4):293-309.
[4]陈晓兵,廖文和,戴宁.三角网格曲面等参数线刀轨生成算法[J].中国机械工程,2013,24(8):1047-1051.
Chen Xiaobing,Liao Wenhe,Dai Ning.Algorithm for Iso-parametric Tool Path Generation for Triangular Mesh Surface Machining[J].China Mechanical Engineering,2013,24(8):1047-1051.
[5]Kout A,Müller H. Tool-adaptive Offset Paths on Triangular Mesh Workpiece Surfaces[J].Computer-Aided Design,2014,50:61-73.
[6]Huertas-Talón J L,García-Hernández C,Berges-Muro L,et al.Obtaining a Spiral Path for Machining STL Surfaces Using Non-deterministic Techniques and Spherical Tool[J]. Computer-Aided Design,2014,50:41-50.
[7]孙殿柱,崔传辉,刘健,等.三角网格曲面模型多轴数控加工刀轨生成算法[J].中国机械工程,2009,20(24):2449-2953.
Sun Dianzhu,Cui Chuanhui,Liu Jian,et al.A Generating Algorithm of Multi-axis NC Machining Tool Path for Triangular Mesh Surface Model[J].China Mechanical Engineering,2009,20(24):2449-2953.
[8]Chen T,Shi Z L.A Tool Path Generation Strategy for Three-axis Ball-end Milling of Free-form Surfaces[J].Journal of Materials Processing Technology,2008,208(1/3):259-2263.
[9]Ouyang D H,Feng H Y.Machining Triangular Mesh Surfaces via Mesh Offset Based Tool Paths[J].Computer- Aided Design and Applications,2008,5(1/4):254-265.
[10]Park S C,Chang M.Tool Path Generation for Surface Model with Defects[J].Computers in Industry,2010,61(1):75-82.
[11]Kim S J, Yang M Y.A CL Surface Deformation Approach for Constant Scallop Height Tool Path Generation from Triangular Mesh[J].International Journal of Advanced Manufacturing Technology,2006,28(3/4):314-320.
[12]Lee S G,Kim H C,Yang M Y.Mesh-based Tool Path Generation for Constant Scallop-height Machining[J].International Journal of Advanced Manufacturing Technology,2008,37(1/2):15-22.
[13]Sun Y W, Guo D M,Jia Z Y.Spiral Cutting Operation Strategy for Machining of Sculptured Surfaces by Conformal Map Approach[J].Journal of Materials Processing Technology,2006,180 (1/3):74-82
[14]Li W L,Yin Z P,Hunag Y,et al. Tool-path Generation Based on Angle-based Flattening[J].Proceedings of the IMechE,Part B:Journal of Engineering Manufacture,2010,224(10):1503-1509.
[15]Lévy B,Petitjean S,Ray N,et al.Least Squares Conformal Maps for Automatic Texture Atlas Generation[J].ACM Transactions on Graphics,2002,21(3):362-371.
[16]Choi B K,Park S C.A Pair-wise Offset Algorithm for 2D Point-sequence Curve[J].Computer-Aided Design,1999,31(12):735-745.
[17]Hansen A,Arbab F.An Algorithm for Generation NC Tool Paths for Arbitrarily Shaped Pockets with Islands[J].ACM Transactions on Graphics,1992,11(2):152-182.
(编辑苏卫国)
A Method for Generating Robot Spraying Paths on Complex Surfaces with Islands
Wang Jintao1Xu Jinting2
1.SIASUN Robot & Automation Co., Ltd.,Shenyang,110168 2.Dalian University of Technology,Dalian,Liaoning,116024
A method for generating robot spraying paths on complex surface with islands was proposed by using the coordinate mapping theory which was used to flatten the sprayed surface onto a plane.On this plane,the spray points were calculated by iteratively offsetting the inner and outer boundaries of the planar surface.Then,using the mapping from the sprayed surface to the planar region as a guide,the planar offset curves without self-intersections were mapped onto the sprayed surface inversely,thus forming the resulting contour-parallel spraying paths.Benefiting the mapping of the sprayed surface to the planar region,the task of generating the spaying paths was simplified from is reduced from 3D surface to 2D plane,geometric computations related to spraying path generation were considerably reduced,especially for self-intersection elimination of offset path. Finally, the proposed method was tested on several sample surfaces and is shown that it can generate contour-parallel spraying paths for complex surfaces nicely,especially for those with holes or islands.
complex surface;robot spraying;curve offsetting;path planning
2014-10-29
国家自然科学基金资助项目(51105058);中央高校基本科研业务费专项资金资助项目(DUT14QY35)
TP391DOI:10.3969/j.issn.1004-132X.2015.14.013
王金涛,男,1980年生。新松机器人自动化股份有限公司机器人事业部总经理。研究方向为机器人设计及自动控制技术。徐金亭,男,1980年生。大连理工大学汽车工程学院副教授、博士。
猜你喜欢
印制电路信息(2023年2期)2023-03-20 07:26:08
汽车实用技术(2022年15期)2022-08-19 02:48:32
中国信息化(2022年5期)2022-06-13 11:12:49
塑料包装(2020年6期)2021-01-21 10:44:32
四川文学(2020年10期)2020-02-06 01:22:28
章回小说(2018年2期)2018-03-09 19:07:41
数位时尚(幼儿教育)(2017年11期)2017-12-13 02:43:44
意林(绘英语)(2016年5期)2016-11-28 01:53:10
北京航空航天大学学报(2016年6期)2016-11-16 01:50:49
重型机械(2014年2期)2014-05-31 11:16:32
